

HRTFs Measurement Based on Periodic Sequences Robust towards Nonlinearities in Automotive Audio †

 , , , and
, , , and 
Abstract
:1. Introduction
2. FLiP Filters, PPSs, and OPSs
2.1. FLiP Filters
2.2. Perfect Periodic Sequences
2.3. Orthogonal Periodic Sequences
2.4. A Comparison between PPSs and OPSs
2.5. Computational Cost of the Identification with PPSs and OPSs
3. Experimental Results
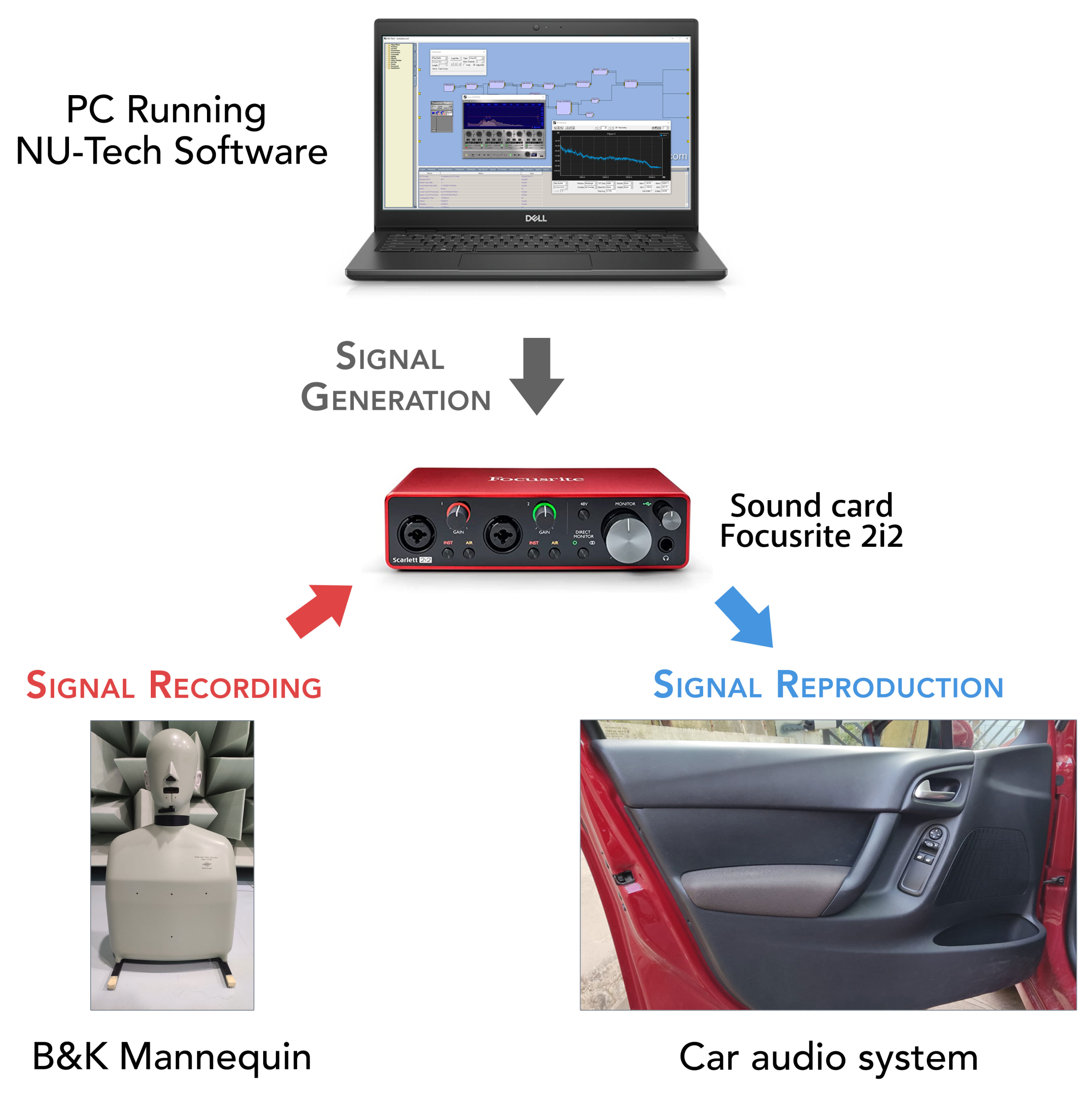
3.1. Real Scenario
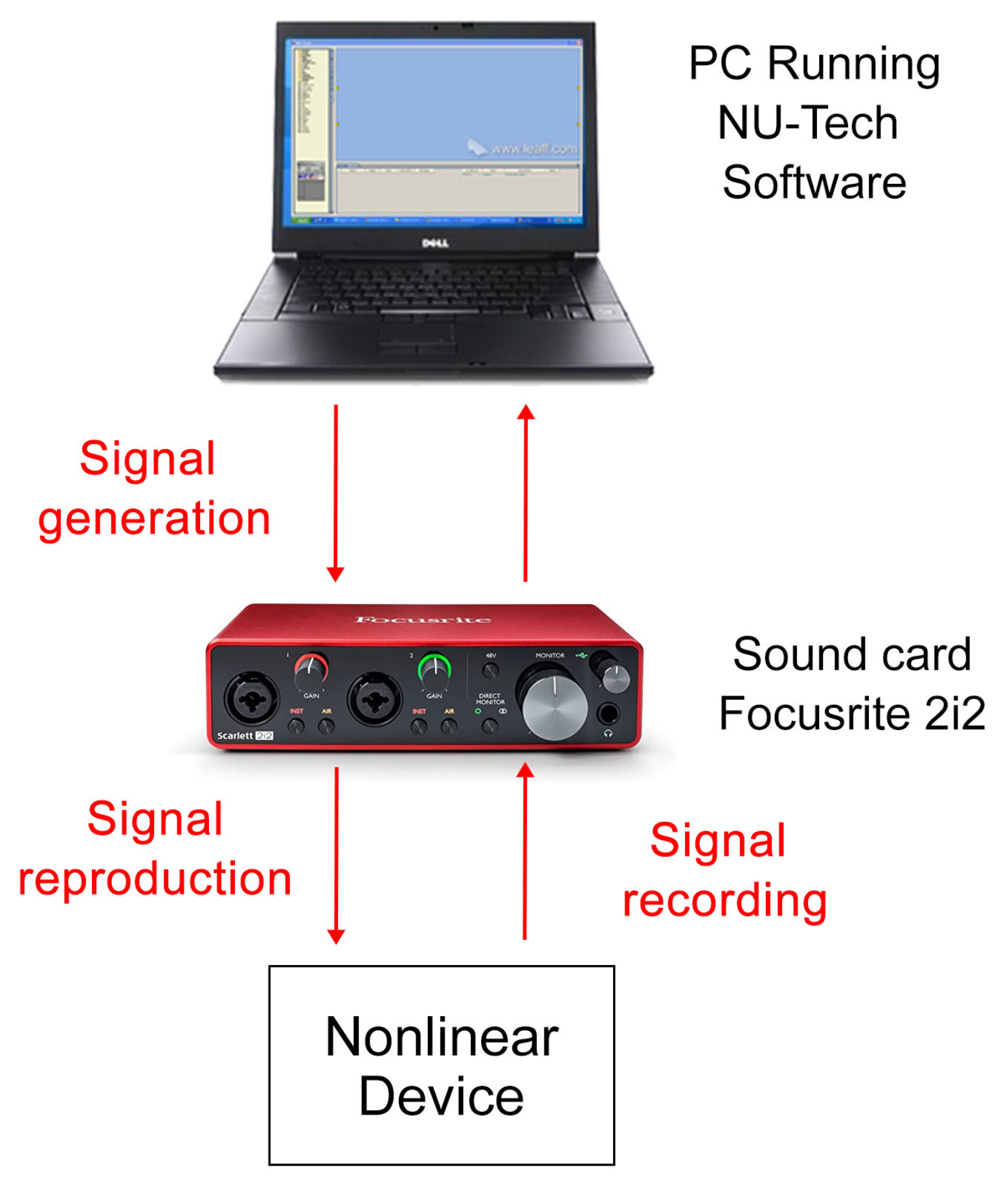
3.2. Emulated Scenario
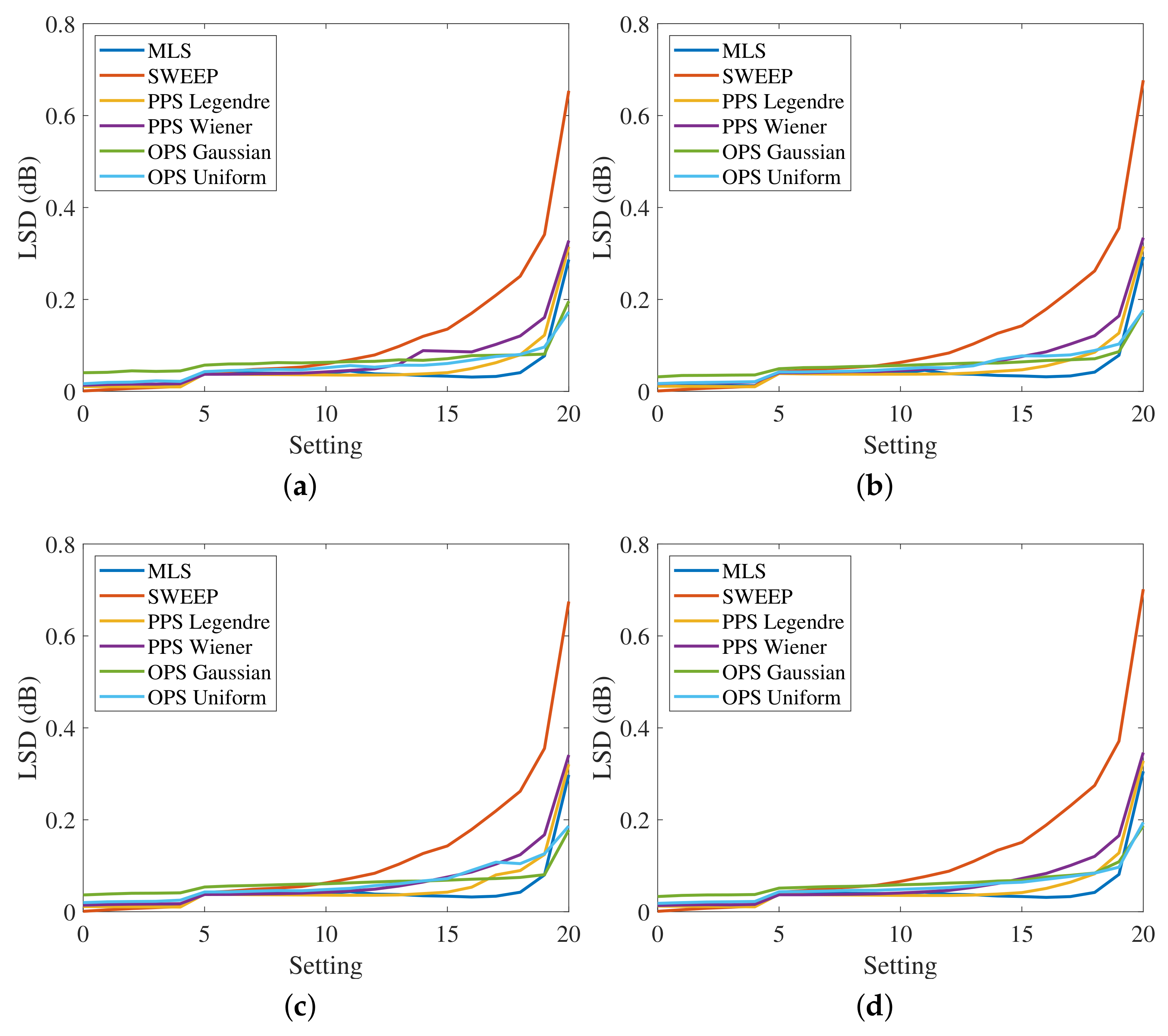
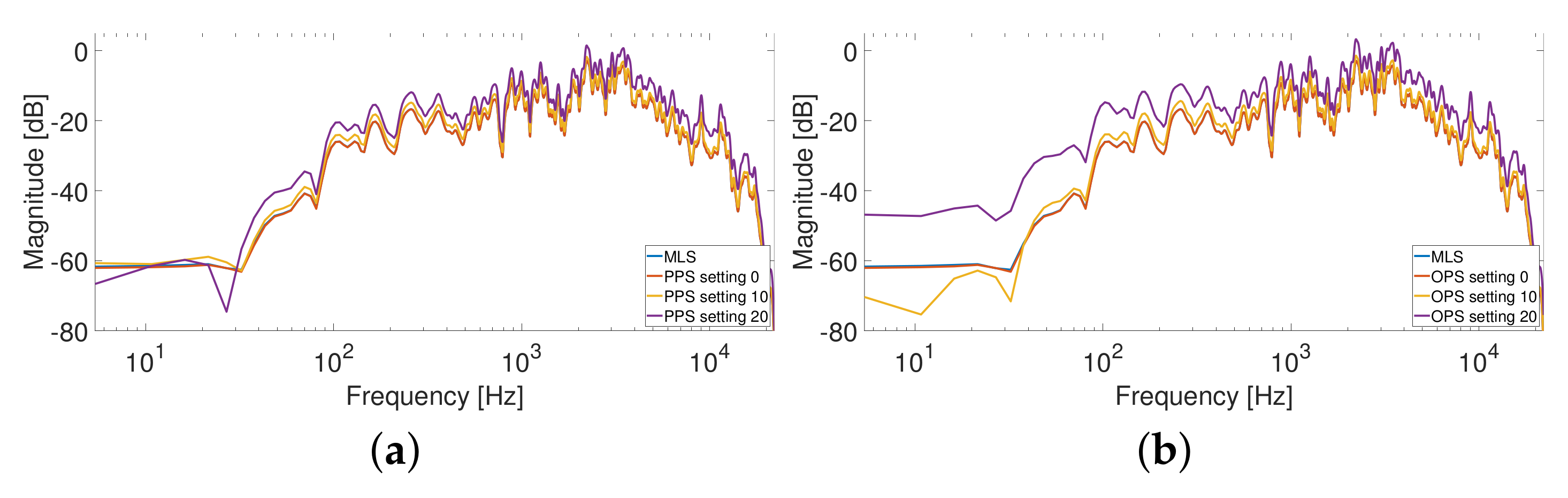
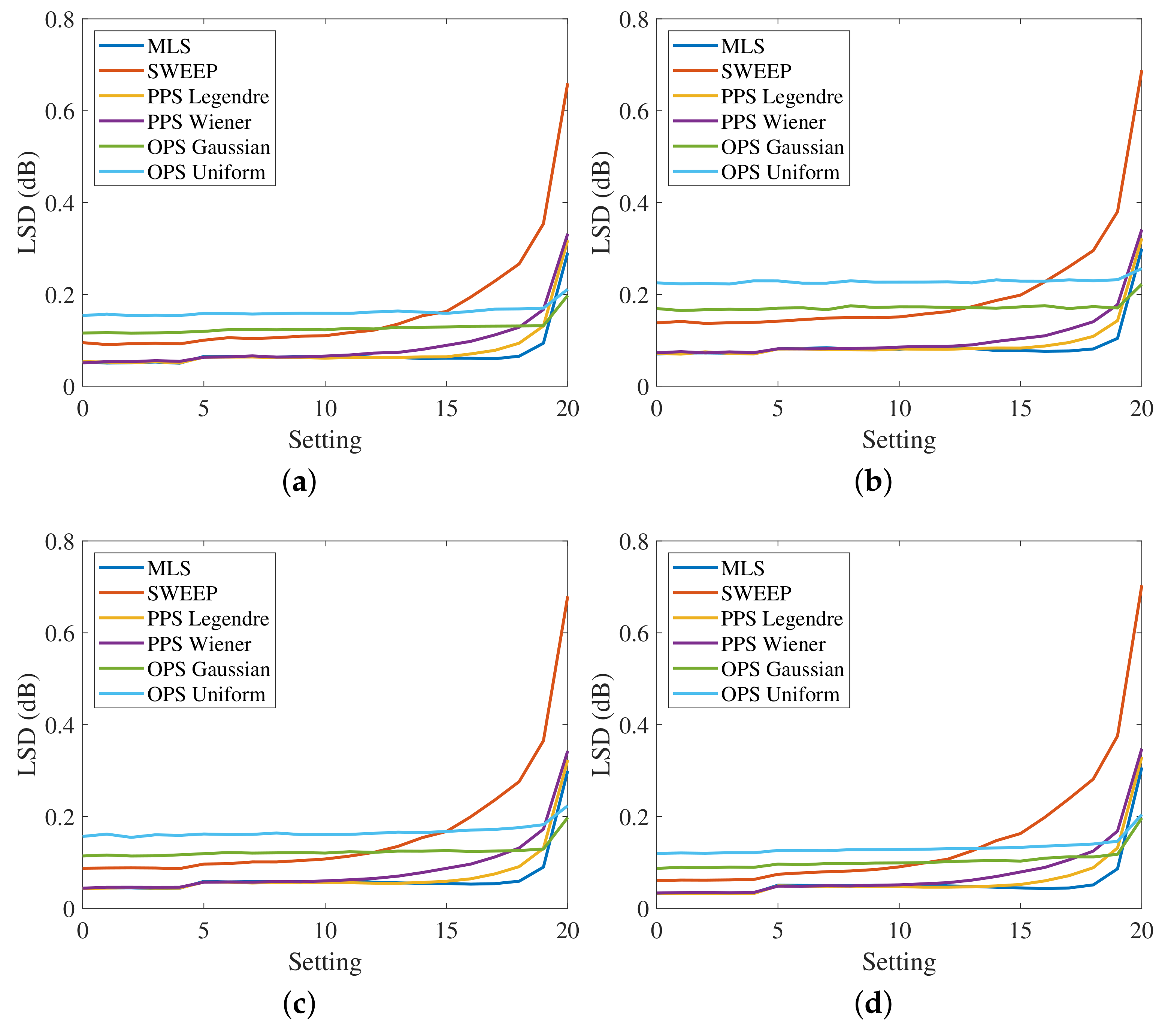
3.2.1. First Experiment
3.2.2. Second Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cecchi, S.; Bruschi, V.; Nobili, S.; Terenzi, A.; Carini, A. Using Periodic Sequences for HRTFs Measurement Robust Towards Nonlinearities in Automotive Audio Applications. In Proceedings of the 2022 IEEE International Workshop on Metrology for Automotive (MetroAutomotive), Modena, Italy, 4–6 July 2022; pp. 99–104. [Google Scholar] [CrossRef]
- Li, S.; Peissig, J. Measurement of head-related transfer functions: A review. Appl. Sci. 2020, 10, 5014. [Google Scholar] [CrossRef]
- Lin, C.; Chen, Y.; Wang, Y. Partial Update Adaptive Filtering Based on Head-Related Model for In-Vehicle Audio Enhancement. In Proceedings of the 2012 International Conference on Connected Vehicles and Expo (ICCVE), Beijing, China, 12–16 December 2012; pp. 226–230. [Google Scholar] [CrossRef]
- Piazza, F.; Squartini, S.; Toppi, R.; Navarri, M.; Pontillo, M.; Bettarelli, F.; Lattanzi, A. Industry-oriented software-based system for quality evaluation of vehicle audio environments. IEEE Trans. Ind. Electron. 2006, 53, 855–866. [Google Scholar] [CrossRef]
- Dupré, T.; Denjean, S.; Aramaki, M.; Kronland-Martinet, R. Spatial Sound Design in a Car Cockpit: Challenges and Perspectives. In Proceedings of the 2021 Immersive and 3D Audio: From Architecture to Automotive (I3DA), Bologna, Italy, 8–10 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Pinardi, D.; Farina, A.; Park, J.S. Low Frequency Simulations for Ambisonics Auralization of a Car Sound System. In Proceedings of the 2021 Immersive and 3D Audio: From Architecture to Automotive (I3DA), Bologna, Italy, 8–10 September 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Gardner, W.; Martin, K.D. HRTF measurements of a KEMAR. J. Acoust. Soc. Am. 1995, 97, 3907–3908. [Google Scholar] [CrossRef]
- Ye, Q.; Dong, Q.; Zhang, Y.; Li, X. Fast head-related transfer function measurement in complex environments. In Proceedings of the 20th International Congress on Acoustics, Sydney, Australia, 23–27 August 2010; pp. 23–27. [Google Scholar]
- Briggs, P.; Godfrey, K. Pseudorandom Signals for the Dynamic Analysis of Multivariable Systems. In Proceedings of the Institution of Electrical Engineers; IET: Stevenage, UK, 1966; Volume 113, pp. 1259–1267. [Google Scholar]
- MacWilliams, F.; Sloane, N. Pseudo-random Sequences and Arrays. Proc. IEEE 1976, 64, 1715–1729. [Google Scholar] [CrossRef]
- Schroeder, M.R. Integrated-Impulse Method Measuring Sound Decay Without Using Impulses. J. Acoust. Soc. Am. 1979, 66, 497–500. [Google Scholar] [CrossRef]
- Borish, J.; Angell, J.B. An Efficient Algorithm for Measuring the Impulse Response Using Pseudorandom Noise. J. Audio Eng. Soc. 1983, 31, 478–488. [Google Scholar]
- Mommertz, E.; Müller, S. Measuring impulse responses with digitally pre-emphasized pseudorandom noise derived from maximum-length sequences. Appl. Acoust. 1995, 44, 195–214. [Google Scholar] [CrossRef]
- Ream, N. Nonlinear identification using inverse-repeatm sequences. In Proceedings of the Institution of Electrical Engineers; IET: Stevenage, UK, 1970; Volume 117, pp. 213–218. [Google Scholar]
- Dunn, C.; Hawksford, M.J. Distortion Immunity of MLS-derived Impulse Response Measurements. J. Audio Eng. Soc. 1993, 41, 314–335. [Google Scholar]
- Golay, M. Complementary series. IRE Trans. Inf. Theory 1961, 7, 82–87. [Google Scholar] [CrossRef]
- Müller, S.; Massarani, P. Transfer-Function Measurement with Sweeps. J. Audio Eng. Soc. 2001, 49, 443–471. [Google Scholar]
- Müller, S. Measuring Transfer-Functions and Impulse Responses. In Handbook of Signal Processing in Acoustics; Havelock, D., Kuwano, S., Vorländer, M., Eds.; Springer: New York, NY, USA, 2008; pp. 65–85. [Google Scholar] [CrossRef]
- Rothbucher, M.; Veprek, K.; Paukner, P.; Habigt, T.; Diepold, K. Comparison of head-related impulse response measurement approaches. J. Acoust. Soc. Am. 2013, 134, EL223–EL229. [Google Scholar] [CrossRef]
- Heyser, R.C. Acoustical Measurements by Time Delay Spectrometry. J. Audio Eng. Soc. 1967, 15, 370–382. [Google Scholar]
- Farina, A. Simultaneous Measurement of Impulse Response and Distortion with a Swept-Sine Technique. J. Audio Eng. Soc. 2000. Available online: https://www.aes.org/e-lib/browse.cfm?elib=10211 (accessed on 2 January 2023).
- Stan, G.B.; Embrechts, J.J.; Archambeau, D. Comparison of Different Impulse Response Measurement Techniques. J. Audio Eng. Soc. 2002, 50, 249–262. [Google Scholar]
- Vanderkooy, J. Aspects of MLS Measuring Systems. J. Audio Eng. Soc. 1994, 42, 219–231. [Google Scholar]
- Torras-Rosell, A.; Jacobsen, F. A New Interpretation of Distortion Artifacts in Sweep Measurements. J. Audio Eng. Soc. 2011, 59, 283–289. [Google Scholar]
- Ćirić, D.G.; Marković, M.; Mijić, M.; Šumarac Pavlović, D. On the Effects of Nonlinearities in Room Impulse Response Measurements with Exponential Sweeps. Appl. Acoust. 2013, 74, 375–382. [Google Scholar] [CrossRef]
- Schmitz, T.; Embrechts, J.J. Hammerstein Kernels Identification by Means of a Sine Sweep Technique Applied to Nonlinear Audio Devices Emulation. J. Audio Eng. Soc. 2017, 65, 696–710. [Google Scholar] [CrossRef]
- Enzner, G. Analysis and optimal control of LMS-type adaptive filtering for continuous-azimuth acquisition of head related impulse responses. In Proceedings of the 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 30 March–4 April 2008; pp. 393–396. [Google Scholar]
- Correa, C.K.; Li, S.; Peissig, J. Analysis and Comparison of different Adaptive Filtering Algorithms for Fast Continuous HRTF Measurement. In Proceedings of the Tagungsband Fortschritte der Akustik—DAGA, Kiel, Germany, 6–9 March 2017; pp. 6–9. [Google Scholar]
- Li, Y.; Preihs, S.; Peissig, J. Acquisition of Continuous-Distance Near-Field Head-Related Transfer Functions on KEMAR Using Adaptive Filtering. In Proceedings of the Audio Engineering Society Convention 152; Audio Engineering Society: The Hague, Netherlands, 2022. [Google Scholar]
- Haykin, S.S. Adaptive Filter Theory; Prentice-Hall: Englewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Xie, B. Head-Related Transfer Function and Virtual Auditory Display; J. Ross Publishing: Fort Lauderdale, FL, USA, 2013. [Google Scholar]
- Carini, A.; Cecchi, S.; Romoli, L.; Sicuranza, G.L. Perfect Periodic Sequences for Legendre Nonlinear Filters. In Proceedings of the 22nd European Signal Processing Conference, Lisbon, Portugal, 1–5 September 2014; pp. 2400–2404. [Google Scholar]
- Carini, A.; Cecchi, S.; Romoli, L. Room Impulse Response Estimation using Perfect sequences for Legendre Nonlinear filters. In Proceedings of the 23nd European Signal Processing Conference, Nice, France, 31 August–4 September 2015. [Google Scholar]
- Carini, A.; Romoli, L.; Cecchi, S.; Orcioni, S. Perfect Periodic Sequences for Nonlinear Wiener Filters. In Proceedings of the 24th European Signal Processing Conference, Budapest, Hungary, 29 August–2 September 2016. [Google Scholar]
- Carini, A.; Cecchi, S.; Romoli, L. Robust room impulse response measurement using perfect sequences for Legendre nonlinear filters. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 1969–1982. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Terenzi, A.; Orcioni, S. On room impulse response measurement using perfect sequences for Wiener nonlinear filters. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 982–986. [Google Scholar] [CrossRef]
- Carini, A.; Orcioni, S.; Cecchi, S. On Room Impulse Response Measurement Using Orthogonal Periodic Sequences. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruña, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar]
- Carini, A.; Cecchi, S.; Orcioni, S. Robust Room Impulse Response Measurement Using Perfect Periodic Sequences for Wiener Nonlinear Filters. Electronics 2020, 9, 1793. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Terenzi, A.; Orcioni, S. A Room Impulse Response Measurement Method Robust Towards Nonlinearities Based on Orthogonal Periodic Sequences. IEEE/ACM Trans. Audio Speech Lang. Process. 2021, 29, 3104–3117. [Google Scholar] [CrossRef]
- Carini, A.; Orcioni, S.; Terenzi, A.; Cecchi, S. Orthogonal periodic sequences for the identification of functional link polynomial filters. IEEE Trans. Signal Process. 2020, 68, 5308–5321. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Orcioni, S. Orthogonal LIP nonlinear filters. In Adaptive Learning Methods for Nonlinear System Modeling; Butterworth-Heineman: Oxford, UK, 2018; pp. 15–46. [Google Scholar]
- Rugh, W. Nonlinear System Theory, the Volterra/Wiener Approach; The Johns Hopkins University Press: Baltimore, MA, USA, 1981. [Google Scholar]
- Carini, A.; Orcioni, S.; Terenzi, A.; Cecchi, S. Nonlinear system identification using Wiener basis functions and multiple-variance perfect sequences. Signal Process. 2019, 160, 137–149. [Google Scholar] [CrossRef]
- Carini, A.; Cecchi, S.; Romoli, L.; Sicuranza, G.L. Legendre nonlinear filters. Signal Process. 2015, 109, 84–94. [Google Scholar] [CrossRef]
- Lattanzi, A.; Bettarelli, F.; Cecchi, S. NU-Tech: The Entry Tool of the hArtes Toolchain for Algorithms Design. In Proceedings of the 124th Audio Engineering Society Convention, Amsterdam, The Netherlands, 17–20 May 2008; pp. 1–8. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods Based on | Robustness towards Nonlinearities | References |
|---|---|---|
| Pseudo-random sequences | No | [7,8,9,10,11,12,13,14,15,16] |
| Adaptive filtering | No | [27,28,29] |
| Sweep signals | Yes but memoryless | [17,18,19,20,21] |
| PPSs | Yes with memory | [33,35,36,38] |
| OPSs | Yes with memory | [39,40] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cecchi, S.; Bruschi, V.; Nobili, S.; Terenzi, A.; Carini, A. HRTFs Measurement Based on Periodic Sequences Robust towards Nonlinearities in Automotive Audio. Sensors 2023, 23, 1692. https://doi.org/10.3390/s23031692
Cecchi S, Bruschi V, Nobili S, Terenzi A, Carini A. HRTFs Measurement Based on Periodic Sequences Robust towards Nonlinearities in Automotive Audio. Sensors. 2023; 23(3):1692. https://doi.org/10.3390/s23031692
Chicago/Turabian StyleCecchi, Stefania, Valeria Bruschi, Stefano Nobili, Alessandro Terenzi, and Alberto Carini. 2023. "HRTFs Measurement Based on Periodic Sequences Robust towards Nonlinearities in Automotive Audio" Sensors 23, no. 3: 1692. https://doi.org/10.3390/s23031692
APA StyleCecchi, S., Bruschi, V., Nobili, S., Terenzi, A., & Carini, A. (2023). HRTFs Measurement Based on Periodic Sequences Robust towards Nonlinearities in Automotive Audio. Sensors, 23(3), 1692. https://doi.org/10.3390/s23031692