
Application of the Model of Spots for Inverse Problems


Abstract
1. Introduction
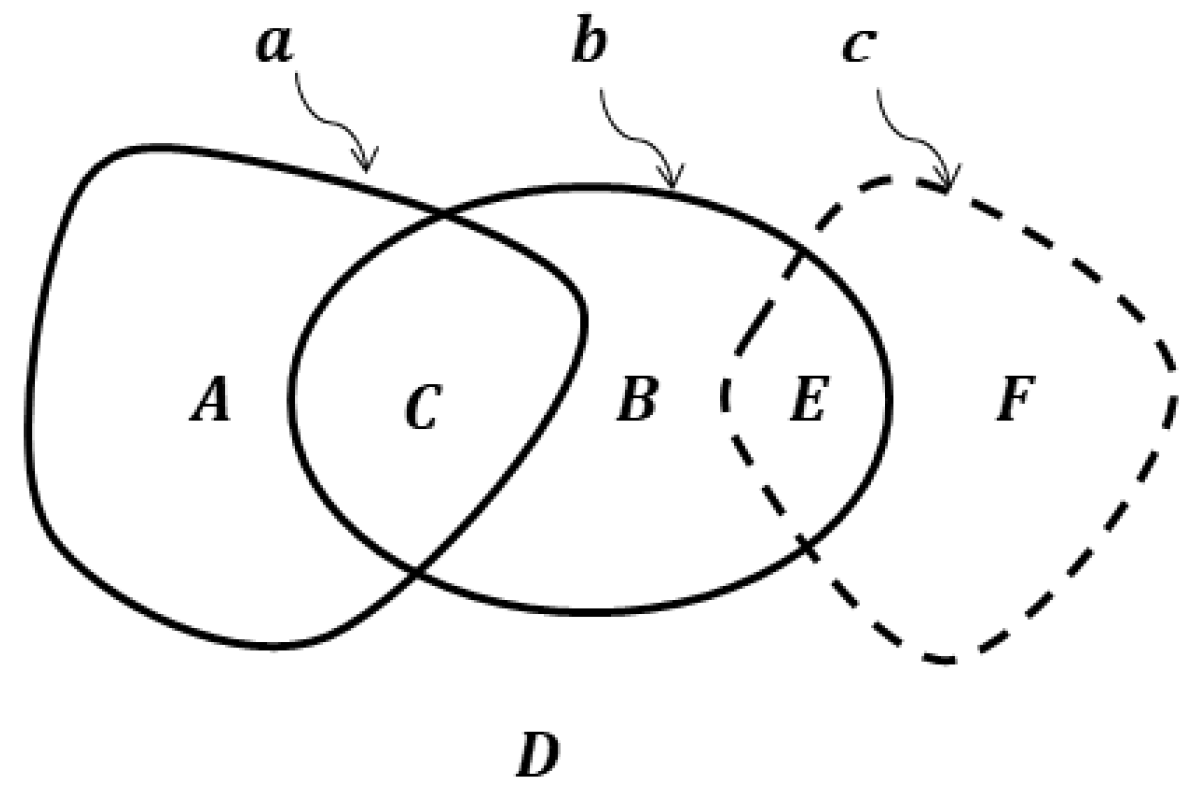
2. Definition of Spots and the Apparatus of L4 Numbers
2.1. Definition of L4 Numbers
2.2. Definition and Geometric Meaning of L4 Vectors and L4 Matrices
2.3. Multiplication Rules for L4 Vectors and L4 Matrixes
3. General Approach to Inverse Problems and Learning Using L4 Matrices
3.1. Solution of Inverse Problems
3.2. Solving Inverse Problems Using L4 Matrices by Learning Method
3.3. Image Reconstruction by Processing Qualitative Data
3.4. Inverse Radon Algorithm for Binary Figures
4. Results of Image Reconstruction
4.1. Reconstruction of Binary Images
4.2. Reconstruction of Gray Scale Images
4.3. Inverse Radon Image Reconstruction
5. Discussion
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ramm, A.G. Inverse Problems: Mathematical and Analytical Techniques with Applications to Engineering; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Devaney, A.J. Mathematical Foundations of Imaging, Tomography and Wavefield Inversion; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Mudry, K.M.; Plonsey, R.; Bronzino, J.D. Biomedical Imaging; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Maisto, M.A.; Masoodi, M.; Pierri, R.; Solimene, R. Sensor Arrangement in Through-the Wall Radar Imaging. IEEE Open J. Antennas Propag. 2022, 3, 333–341. [Google Scholar] [CrossRef]
- Chen, X. Computational Methods for Electromagnetic Inverse Scattering; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Chandra, R.; Zhou, H.; Balasingham, I.; Narayanan, R.M. On the Opportunities and Challenges in Microwave Medical Sensing and Imaging. IEEE Trans. Biomed. Eng. 2015, 62, 1667–1682. [Google Scholar] [CrossRef]
- Simonov, N.; Kim, B.-R.; Lee, K.-J.; Jeon, S.-I.; Son, S.-H. Advanced Fast 3-D Electromagnetic Solver for Microwave Tomography Imaging. IEEE Trans. Med Imaging 2017, 36, 2160–2170. [Google Scholar] [CrossRef]
- O’Loughlin, D.; O’Halloran, M.J.; Moloney, B.M.; Glavin, M.; Jones, E.; Elahi, M.A. Microwave Breast Imaging: Clinical Advances and Remaining Challenges. IEEE Trans. Biomed. Eng. 2018, 65, 2580–2590. [Google Scholar] [CrossRef] [PubMed]
- Shao, W.; McCollough, T. Advances in Microwave Near-Field Imaging: Prototypes, Systems, and Applications. IEEE Microw. Mag. 2020, 21, 94–119. [Google Scholar] [CrossRef] [PubMed]
- Simonov, N.; Son, S.-H. Overcoming Insufficient Microwave Scattering Data in Microwave Tomographic Imaging. IEEE Access 2021, 9, 111231–111237. [Google Scholar] [CrossRef]
- Li, K.; Tang, J.; Chen, G.-H. Statistical model based iterative reconstruction (MBIR) in clinical CT systems: Experimental assessment of noise performance. Med. Phys. 2014, 41, 041906. [Google Scholar] [CrossRef] [PubMed]
- Pickhardt, P.J.; Lubner, M.G.; Kim, D.H.; Tang, J.; Ruma, J.A.; del Rio, A.M.; Chen, G.-H. Abdominal CT With Model-Based Iterative Reconstruction (MBIR): Initial Results of a Prospective Trial Comparing Ultralow-Dose With Standard-Dose Imaging. Am. J. Roentgenol. 2012, 199, 1266–1274. [Google Scholar] [CrossRef]
- Fessler, J.A. Model-Based Image Reconstruction for MRI. IEEE Signal Process. Mag. 2010, 27, 81–89. [Google Scholar] [CrossRef]
- Wang, X.; Tan, Z.; Scholand, N.; Roeloffs, V.; Uecker, M. Physics-based reconstruction methods for magnetic resonance imaging. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2021, 379, 20200196. [Google Scholar] [CrossRef]
- McLeavy, C.; Chunara, M.; Gravell, R.; Rauf, A.; Cushnie, A.; Talbot, C.S.; Hawkins, R. The future of CT: Deep learning reconstruction. Clin. Radiol. 2021, 76, 407–415. [Google Scholar] [CrossRef] [PubMed]
- Lee, D.; Lee, J.; Ko, J.; Yoon, J.; Ryu, K.; Nam, Y. Deep learning in MR image processing. Investig. Magn. Reson. Imaging 2019, 23, 81–99. [Google Scholar] [CrossRef]
- Khoshdel, V.; Ashraf, A.; LoVetri, J. Enhancement of Multimodal Microwave-Ultrasound Breast Imaging Using a Deep-Learning Technique. Sensors 2019, 19, 4050. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Ren, X.; Guo, L.; Li, Z. A Non-Iterative Method Combined with Neural Network Embedded in Physical Model to Solve the Imaging of Electromagnetic Inverse Scattering Problem. Electronics 2021, 10, 3104. [Google Scholar] [CrossRef]
- Gao, F.; Huang, T.; Sun, J.; Wang, J.; Hussain, A.; Yang, E. A New Algorithm for SAR Image Target Recognition Based on an Improved Deep Convolutional Neural Network. Cogn. Comput. 2018, 11, 809–824. [Google Scholar] [CrossRef]
- Chen, X.; Wei, Z.; Li, M.; Rocca, P. A review of deep learning approaches for inverse scattering problems (invited review). Prog. Electromagn. Res. 2020, 167, 67–81. [Google Scholar] [CrossRef]
- Zhu, X.X.; Montazeri, S.; Ali, M.; Hua, Y.; Wang, Y.; Mou, L.; Shi, Y.; Xu, F.; Bamler, R. Deep Learning Meets SAR: Concepts, models, pitfalls, and perspectives. IEEE Geosci. Remote Sens. Mag. 2021, 9, 143–172. [Google Scholar] [CrossRef]
- Alshammari, M.M.; Almuhanna, A.; Alhiyafi, J. Mammography Image-Based Diagnosis of Breast Cancer Using Machine Learning: A Pilot Study. Sensors 2022, 22, 203. [Google Scholar] [CrossRef]
- Fayaz, M.; Torokeldiev, N.; Turdumamatov, S.; Qureshi, M.S.; Qureshi, M.B.; Gwak, J. An Efficient Methodology for Brain MRI Classification Based on DWT and Convolutional Neural Network. Sensors 2021, 21, 7480. [Google Scholar] [CrossRef]
- Awan, M.J.; Rahim, M.S.M.; Salim, N.; Rehman, A.; Garcia-Zapirain, B. Automated Knee MR Images Segmentation of Anterior Cruciate Ligament Tears. Sensors 2022, 22, 1552. [Google Scholar] [CrossRef]
- Simons, T.; Lee, D.-J. A Review of Binarized Neural Networks. Electronics 2019, 8, 661. [Google Scholar] [CrossRef]
- Aggarwal, C.C. Neural Networks and Deep Learning; Springer: Cham, Switzerland, 2018; Volume 10, pp. 978–983. [Google Scholar] [CrossRef]
- Simonov, N.A. Spots Concept for Problems of Artificial Intelligence and Algorithms of Neuromorphic Systems. Russ. Microelectron. 2020, 49, 431–444. [Google Scholar] [CrossRef]
- Simonov, N. The Spot Model for Representation and Processing of Qualitative Data and Semantic Information. In Proceedings of the Selected Contributions to the Russian Advances in Artificial Intelligence Track at RCAI 2021, Taganrog, Russia, 11–16 October 2021; pp. 55–69. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, UK, 2016. [Google Scholar]
- Whitehead, A.N. Process and Reality: An Essay in Cosmology; Cambridge University Press: Cambridge, UK, 1929. [Google Scholar]
- Clarke, B.L. A calculus of individuals based on connection. Notre Dame J. Form. Log. 1981, 22, 204–218. [Google Scholar] [CrossRef]
- Asher, N.; Vieu, L. Toward a geometry of common sense: A semantics and a complete axiomatization of mereotopology. In Proceedings of the IJCAI’95-ATAL Workshop, Montreal, Canada, 19–20 August 1995; pp. 846–852. [Google Scholar]
- Stell, J.G. Mereotopology and Computational Representations of the Body. Comput. Cult. 2017, 6. [Google Scholar]
- Cohn, A.G.; Bennett, B.; Gooday, J.; Gotts, N.M. Qualitative Spatial Representation and Reasoning with the Region Connection Calculus. Geoinformatica 1997, 1, 275–316. [Google Scholar] [CrossRef]
- Cohn, A.G.; Renz, J. Qualitative Spatial Representation and Reasoning. In Handbook of Knowledge Representation; van Harmelen, F., Lifschitz, V., Porter, B., Eds.; Elsevier B.V.: Amsterdam, Netherlands, 2008; Chapter 13; pp. 551–596. [Google Scholar] [CrossRef]
- Cohn, A.G.; Gotts, N.M. A mereological approach to representing spatial vagueness. In Proceedings of the 5th Conference Principles of Knowledge Representation and Reasoning, Cambridge, MA, USA, 5–8 November 1996; Morgan Kaufmann: Burlington, NJ, USA, 1996; pp. 230–241. [Google Scholar]
- Galton, A. The mereotopology of discrete space. In Proceedings of the International Conference COSIT’99, Stade, Germany, 25–29 August 1999; pp. 251–266. [Google Scholar]
- Galton, A. Discrete mereotopology. In Mereology and the Sciences; Synthese Library (Studies in Epistemology, Logic, Methodology, and Philosophy of Science); Calosi, C., Graziani, P., Eds.; Springer: Cham, Switzerland, 2014; Volume 371, pp. 293–321. [Google Scholar]
- Balbiani, P.; Gencer, C. Finitariness of elementary unification in Boolean Region Connection Calculus. In International Symposium on Frontiers of Combining Systems; Springer: Cham, Switzerland, 2017; pp. 281–297. [Google Scholar]
- Izadi, A.; Stock, K.M.; Guesgen, H.W. Multidimensional Region Connection Calculus. In Proceedings of the 30th International Workshop on Qualitative Reasoning, Melbourne, Australia, 21 August 2017. [Google Scholar]
- Davari, S.; Ghadiri, N. Fuzzy region connection calculus and its application in fuzzy spatial skyline queries. In Intelligent Computing-Proceedings of the Computing Conference; Arai, K., Bhatia, R., Kapoor, S., Eds.; Springer: Cham, Switzerland, 2019; Volume 997, pp. 659–677. [Google Scholar]
- Bennett, B. Spatial reasoning with propositional logics. In Proceedings of the 4th International Conference on Principles on Knowledge Representation and Reasoning (KR-94); Doyle, J., Sandewall, E., Torasso, P., Eds.; Morgan Kaufmann: Bonn, Germany, 1994; pp. 165–176. [Google Scholar]
- Drakengren, T.; Jonsson, P. A Complete Classification of Tractability in RCC-5. J. Artif. Intell. Res. 1997, 6, 211. [Google Scholar] [CrossRef]
- Egenhofer, M.J.; Franzosa, R. Point-set topological spatial relations. Int. J. Geogr. Inf. Syst. 1991, 5, 161–174. [Google Scholar] [CrossRef]
- Egenhofer, M.J.; Herring, J.R. Categorizing Binary Topological Relations between Regions, Lines and Points in Geographic Databases; Technical Report; Department of Surveying Engineering, University of Maine: Orono, ME, USA, 1991. [Google Scholar]
- Clementini, E.; Di Felice, P. Approximate topological relations. Int. J. Approx. Reason. 1997, 16, 173–204. [Google Scholar] [CrossRef]
- Stell, J.G. Part and complement: Fundamental concepts in spatial relations. Ann. Math. Artif. Intell. 2004, 41, 1–17. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough sets. Int. J. Comput. Inf. Sci. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough set theory and its applications to data analysis. Cybern. Syst. 1998, 29, 661–688. [Google Scholar] [CrossRef]
- Suraj, Z. An Introduction to Rough Set Theory and Its Applications: A Tutorial. In Proceedings of the 1st International Computer Engineering Conference (ICENCO’) New Technologies for the Information Society, Cairo, Egypt, 27–30 December 2004; pp. 1–39. [Google Scholar]
- Peters, G.; Lingras, P.; Slezak, D.; Yao, Y.Y. (Eds.) Rough Sets: Selected Methods and Applications in Management and Engineering; Springer: London, UK, 2012. [Google Scholar]
- Yao, Y.Y. Rough set approximations: A concept analysis point of view. In Computational Intelligence; Ishibuchi, H., Ed.; Encyclopedia of Life Support Systems; UNESCO-EOLSS: Paris, France, 2015; Volume 1, pp. 282–296. [Google Scholar]
- Skowron, A.; Dutta, S. Rough sets: Past, present, and future. Nat. Comput. 2018, 17, 855–876. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Wang, L.; Xu, J.; Zhang, S. A Neighborhood Rough Sets-Based Attribute Reduction Method Using Lebesgue and Entropy Measures. Entropy 2019, 21, 138. [Google Scholar] [CrossRef]
- Slim, H.; Nadeau, S. A Mixed Rough Sets/Fuzzy Logic Approach for Modelling Systemic Performance Variability with FRAM. Sustainability 2020, 12, 1918. [Google Scholar] [CrossRef]
- Wille, R. Restructuring lattice theory: An approach based on hierarchies of concepts. In Ordered Sets; Rival, I., Ed.; Reidel: Dordrecht, The Netherlands, 1982; pp. 445–470. [Google Scholar]
- Ganter, B.; Wille, R. Formal Concept Analysis: Mathematical Foundations; Springer: New York, NY, USA, 1999. [Google Scholar]
- Wille, R. Formal Concept Analysis as Mathematical Theory of Concepts and Concept Hierarchies. In Formal Concept Analysis, LNAI 3626; Ganter, B., Stumme, G., Wille, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 1–33. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Buckley, J.J.; Eslami, E. Fuzzy plane geometry I: Points and lines. Fuzzy Sets Syst 1997, 86, 179–187. [Google Scholar] [CrossRef]
- Buckley, J.J.; Eslami, E. Fuzzy plane geometry II: Circles and polygons. Fuzzy Sets Syst. 1997, 87, 79–85. [Google Scholar] [CrossRef]
- Zadeh, L.A. Towards a theory of fuzzy information granulation and its centrality in human reasoning and fuzzy logic. Fuzzy Sets Syst. 1997, 19, 111–127. [Google Scholar] [CrossRef]
- Yao, J.T. A Ten-year Review of Granular Computing. In Proceedings of the IEEE International Conference on Granular Computing, Silicon Valley, CA, USA, 2–5 November 2007; pp. 734–739. [Google Scholar]
- Lin, T.Y. Data mining: Granular computing approach. In Proceedings of the Pacific-Asia Conference on Knowledge Discovery and Data Mining, Beijing, China, 26–28 April 1999; Springer: Berlin/Heidelberg, Germany, 1999; pp. 24–33. [Google Scholar]
- Yao, Y.Y. Information granulation and rough set approximation. Int. J. Intell. Syst. 2001, 16, 87–104. [Google Scholar] [CrossRef]
- Nguyen, S.H.; Skowron, A.; Stepaniuk, J. Granular computing: A rough set approach. Comput. Intell. 2001, 17, 514–544. [Google Scholar] [CrossRef]
- Yao, J.T.; Vasilakos, A.V.; Pedrycz, W. Granular Computing: Perspectives and Challenges. IEEE Trans. Cybern. 2013, 43, 1977–1989. [Google Scholar] [CrossRef] [PubMed]
- Skowron, A.; Jankowski, A.; Dutta, S. Interactive granular computing. Granul. Comput. 2016, 1, 95–113. [Google Scholar] [CrossRef]
- Butenkov, S.A.; Krivsha, V.V.; Krivsha, N.S. The Use of the Mathematical Apparatus of Spatial Granulation in The Problems of Perception and Image Recognition. Recognit. Percept. Images Fundam. Appl. 2021, 221–259. [Google Scholar] [CrossRef]
- Diestel, R. Graph Theory, 3rd ed.; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2005. [Google Scholar]
- Klette, R.; Rosenfeld, A. Digital Geometry: Geometric Methods for Digital Picture Analysis; Elsevier, Morgan Kaufmann Publishers: San Francisco, CA, USA, 2004; Chapters 4–5. [Google Scholar]
- Rubinov, M.; Sporns, O. Complex network measures of brain connectivity: Uses and interpretations. NeuroImage 2010, 52, 1059–1069. [Google Scholar] [CrossRef] [PubMed]
- Cao, S.; Lu, W.; Xu, Q. Deep neural networks for learning graph representations. In Proceedings of the 30th AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016; pp. 1145–1152. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional neural networks on graphs with fast localized spectral filtering. In Proceedings of the 30th Conference on Neural Information Processing Systems (NIPS 2016), Barcelona, Spain, 5–10 December 2016; pp. 3844–3852. [Google Scholar]
- Cui, P.; Wang, X.; Pei, J.; Zhu, W. A survey on network embedding. IEEE Trans. Knowl. Data Eng. 2019, 31, 833–852. [Google Scholar] [CrossRef]
- Bordes, A.; Usunier, N.; Garcia-Dur’an, A.; Weston, J.; Yakhnenko, O. Translating embeddings for modeling multi-relational data. In Advances in Neural Information Processing Systems 26; Burges, C.J.C., Bottou, L., Welling, M., Ghahramani, Z., Eds.; Curran Associates, Inc.: Redhook, NY, USA, 2018; pp. 2787–2795. [Google Scholar]
- Wang, Z.; Zhang, J.; Feng, J.; Chen, Z. Knowledge graph embedding by translating on hyperplanes. In Proceedings of the 28th AAAI Conference on Artificial Intelligence, Québec City, QC, Canada, 27–31 July 2014; pp. 1112–1119. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elementary Relations | L4 Number |
|---|---|
| intersection, | |
| separation, | |
| inclusion (more), | |
| inclusion (less), | |
| indiscernibility, |
| Concepts of the Rough Set Theory | Concepts of the Spots Model |
|---|---|
| elements of the universe | atomic basis |
| granules | spots |
| attributes | basis of spots |
| attributes values | L4 numbers |
| boundary region | boundary |
| lower approximation | inner region |
| upper approximation | inner region + boundary |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Simonov, N.A. Application of the Model of Spots for Inverse Problems. Sensors 2023, 23, 1247. https://doi.org/10.3390/s23031247
Simonov NA. Application of the Model of Spots for Inverse Problems. Sensors. 2023; 23(3):1247. https://doi.org/10.3390/s23031247
Chicago/Turabian StyleSimonov, Nikolai A. 2023. "Application of the Model of Spots for Inverse Problems" Sensors 23, no. 3: 1247. https://doi.org/10.3390/s23031247
APA StyleSimonov, N. A. (2023). Application of the Model of Spots for Inverse Problems. Sensors, 23(3), 1247. https://doi.org/10.3390/s23031247