
Estimating the Inertia Tensor Components of an Asymmetrical Spacecraft When Removing It from the Operational Orbit at the End of Its Active Life



Abstract
:1. Introduction
- (1)
- A method for estimating the inertia tensor components of space debris and the parameters of its rotational motion by attaching elements of the data-measuring system on a space debris object is proposed;
- (2)
- A simulation is carried out for a particular case of attaching measuring instruments on a space debris object;
- (3)
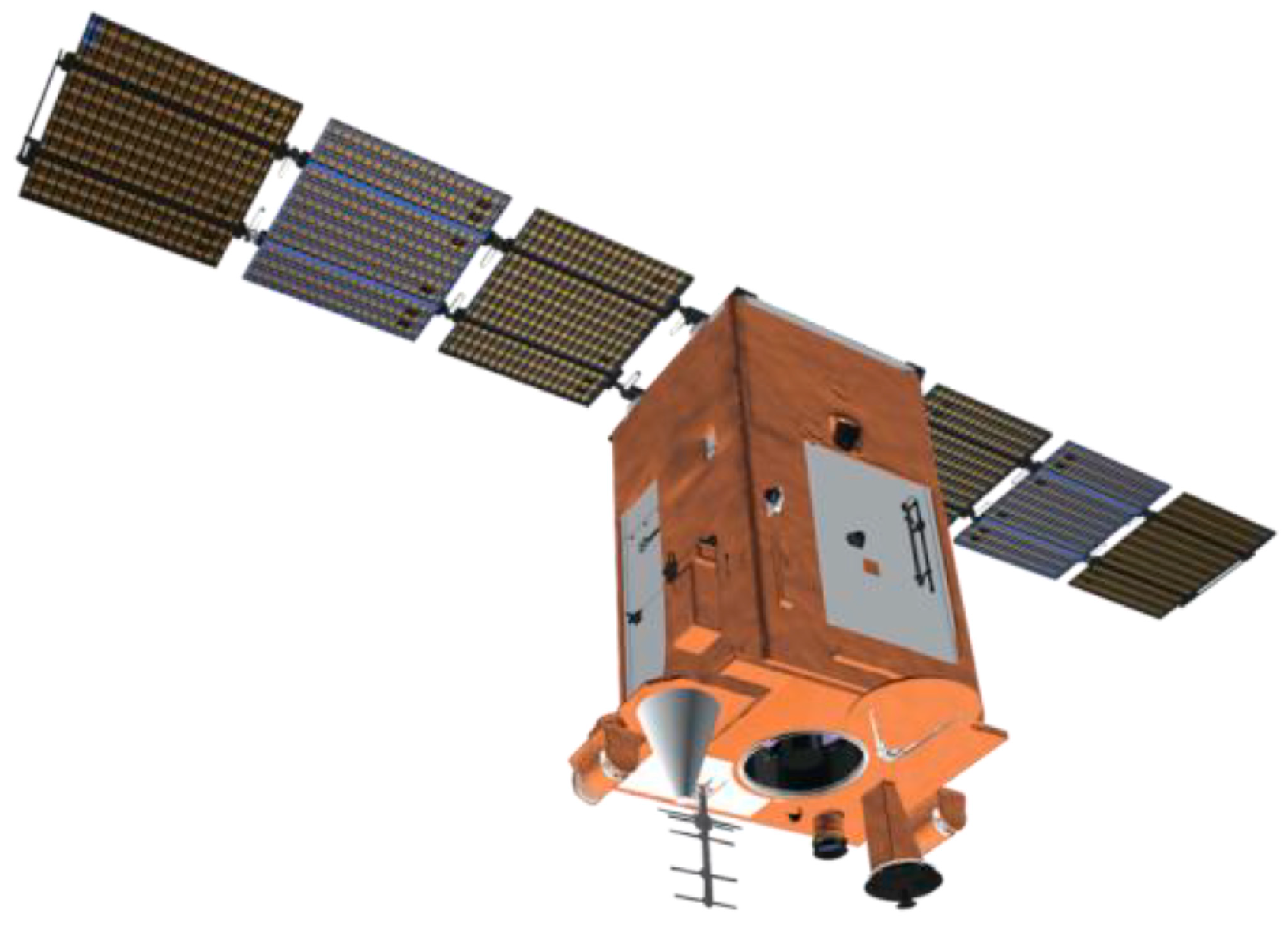
- The results of numerical simulation for a particular case with an estimation of inertia tensor components for the Aist-2D small spacecraft are presented;
- (4)
- An analysis of the obtained results was carried out and recommendations for its use were given.
2. Problem Formulation
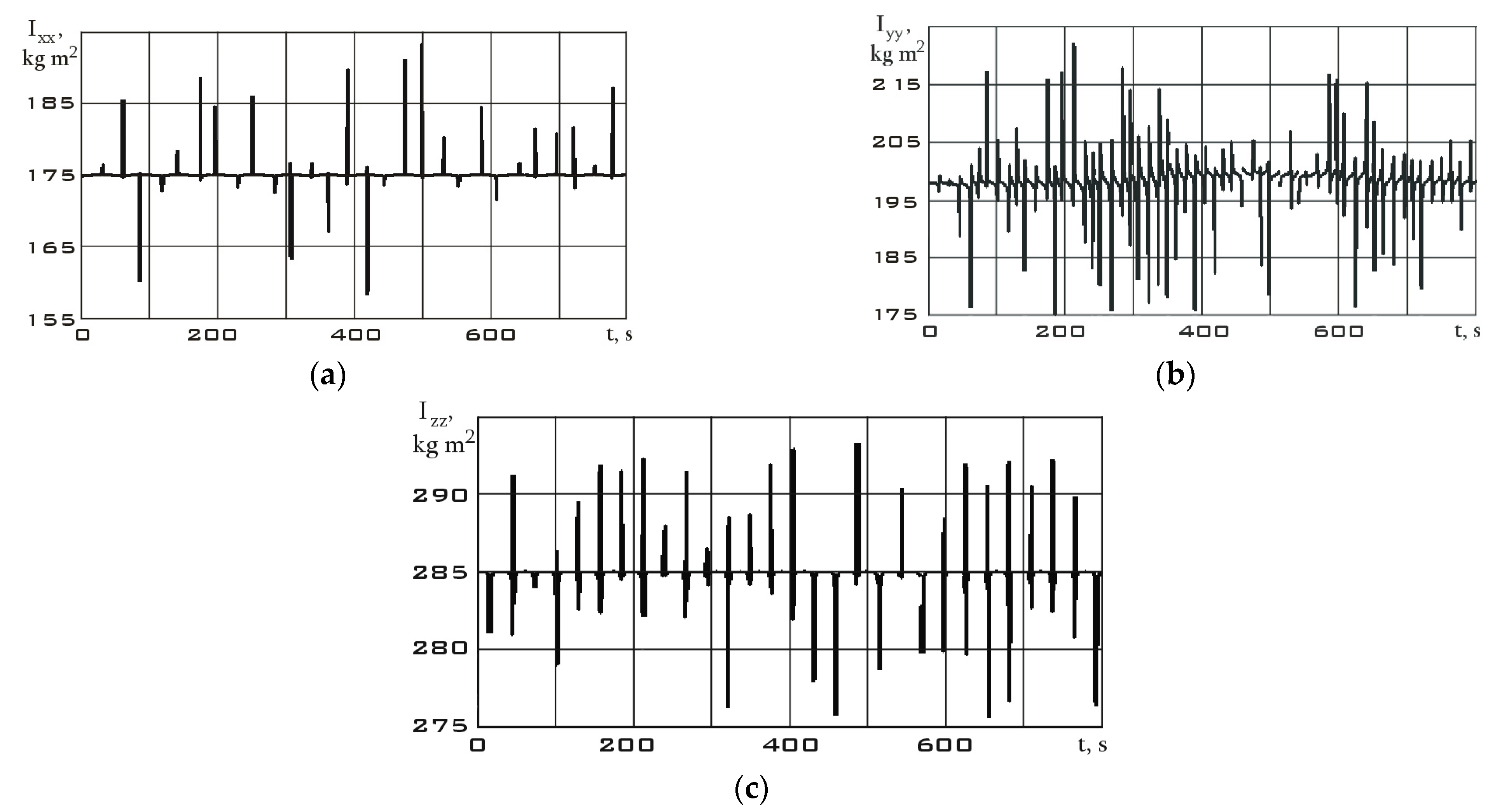
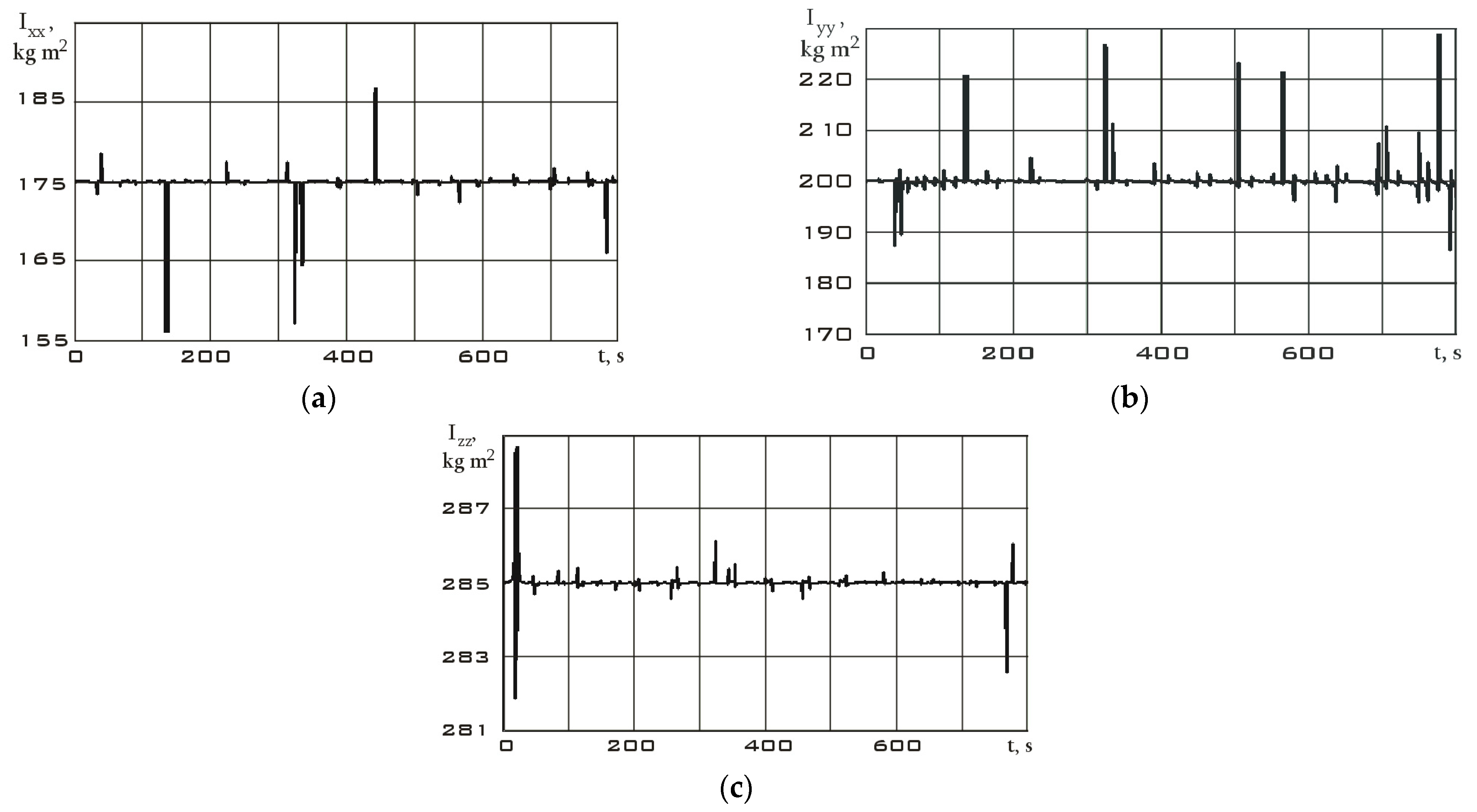
3. Numerical Simulation for the Aist-2D Small Spacecraft
- –
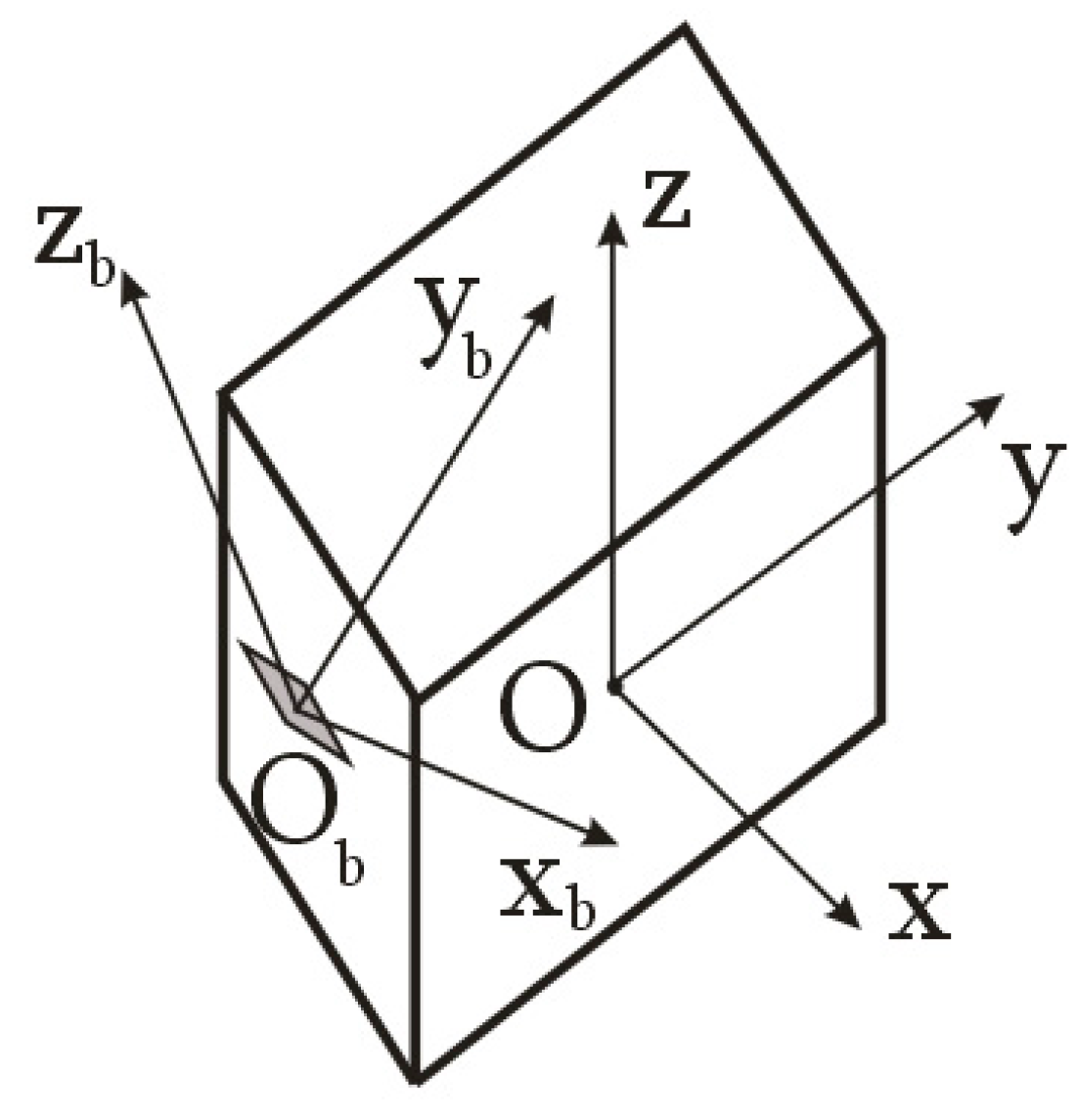
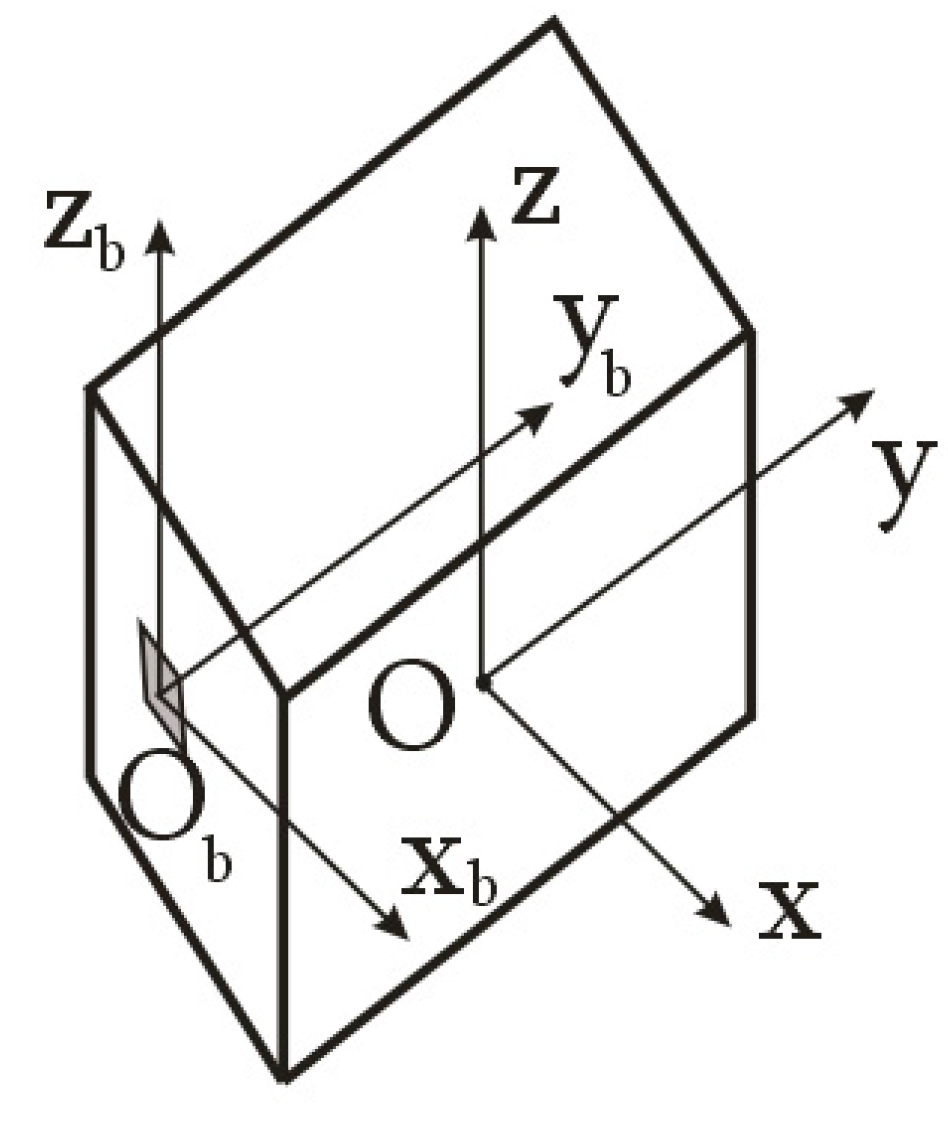
- The fixing of the magnetometers on the space debris object, the construction axes of which are parallel to the axes of the main connected coordinate system of the space debris object;
- –
- The implementation of a controlled impact on the space debris object;
- –
- Carrying out measurements with a uniform step sufficient for the subsequent correct restoration of a continuous signal;
- –
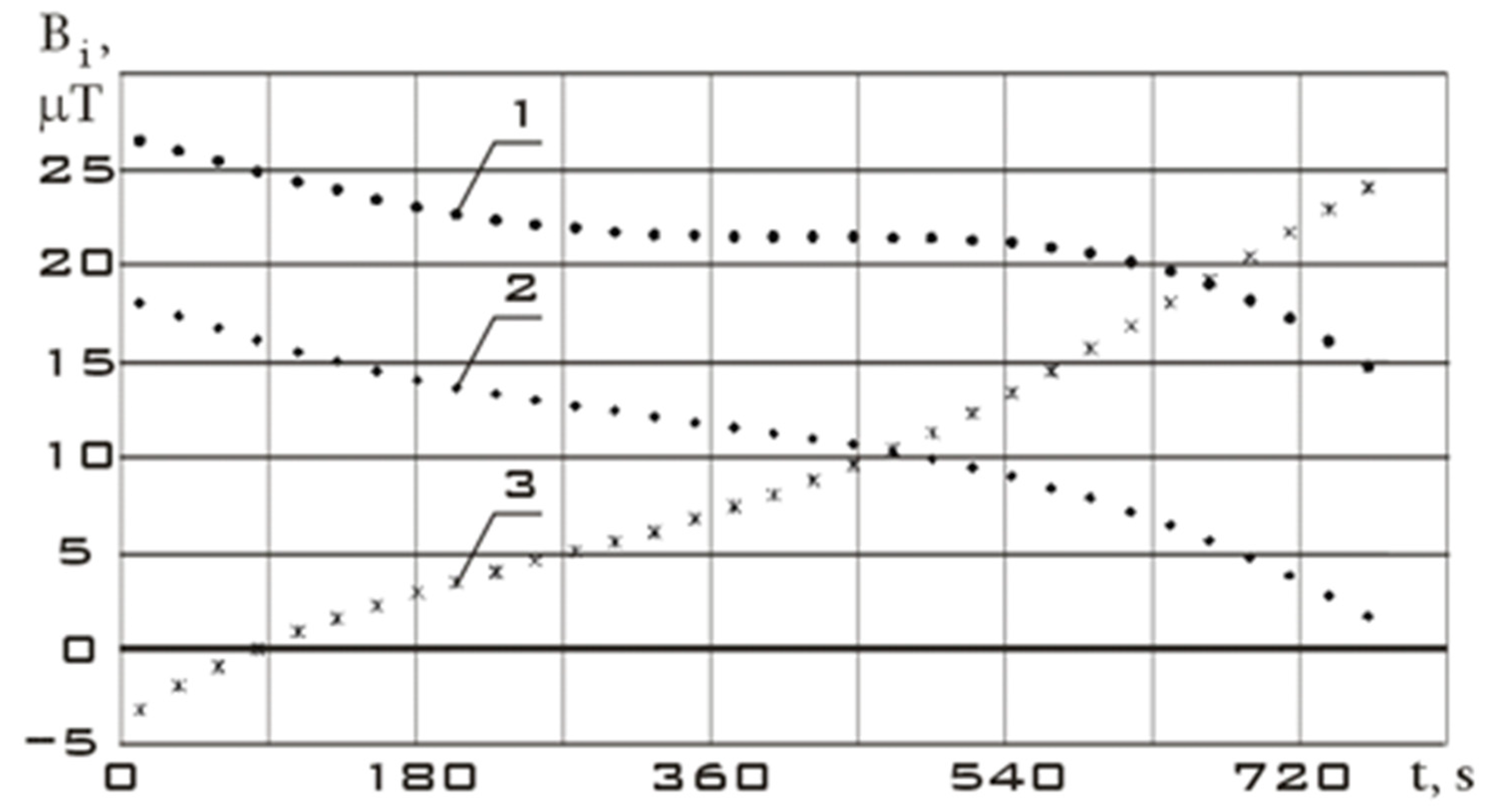
- The restoration of continuous dependences of the Earth’s magnetic field induction vector components via their discrete measurements;
- –
- The estimation of the angular velocity and angular acceleration of the space debris object as a result of a controlled impact;
- –
- The estimation of the space debris object inertia tensor components using dynamic Euler equations.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kessler, D.J.; Burton, G.C.-P. Collision Frequency of Artificial Satellites: The Creation of a Debris Belt. J. Geophys. Res. 1978, 83, 2637–2646. [Google Scholar] [CrossRef]
- Orbital Debris: A Chronology, NASA/TP-1999-208856. January 1999. Available online: https://ston.jsc.nasa.gov/collections/TRS/_techrep/TP-1999-208856.pdf (accessed on 1 October 2023).
- Schaub, H.; Sternovsky, Z. Active space debris charging for contactless electrostatic disposal maneuvers. Adv. Space Res. 2014, 53, 110–118. [Google Scholar] [CrossRef]
- Rossi, A. The earth orbiting space debris. Serbian Astron. J. 2005, 170, 1–12. [Google Scholar] [CrossRef]
- Catapult. Satellite Applications Catapult. In Small Satellite Market Intelligence Report Q3 2021; Catapult: Harwell, UK, 2021. [Google Scholar]
- Krestina, A.V.; Tkachenko, I.S. Efficiency Assessment of the Deorbiting Systems for Small Satellite. J. Aeronaut. Astronaut. Aviat. 2022, 54, 227–240. [Google Scholar]
- Burkhardt, H.; Sippel, M.; Krülle, G.; Janovsky, R.; Kassebom, M.; Lübberstedt, H.; Romberg, O.; Fritsche, B. Evaluation of Propulsion Systems for Satellite End-of-Life De-Orbiting. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, Indianapolis, IN, USA, 7–10 July 2002. [Google Scholar]
- Serfonteina, Z.; Kingston, J.; Hobbs, S.; Holbrough, I.E.; Beck, J.C. Drag Augmentation Systems for Space Debris Mitigation. Acta Astronaut. 2021, 118, 278–288. [Google Scholar] [CrossRef]
- Serfonteina, Z.; Rigamonti, L.M.; Demers, E.; Temprano, G.; Kingston, J. LEOniDAS Drag Sail Experiment on the 2021 ESA Fly Your Thesis! Parabolic Flight Campaign. In Proceedings of the 4th Symposium on Space Educational Activities Barcelona, Barcelona, Spain, 27–29 April 2022. [Google Scholar]
- Sanchez-Arriaga, G.; Sanmartin, J.R.; Lorenzini, E.C. Comparison of Technologies for Deorbiting Spacecraft From Low-Earth-Orbit at End of Mission. Acta Astronaut. 2017, 138, 536–542. [Google Scholar] [CrossRef]
- Sedelnikov, A.V.; Bratkova, M.E.; Khnyryova, E.S. Algorithm for the Operation of the Data-measuring System for Evaluating the Inertial-mass Characteristics of Space Debris. In Lecture Notes in Electrical Engineering; Springer: Singapore, 2023; Volume 1047. [Google Scholar]
- Aslanov, V.S.; Ledkov, A.S. Dynamics of reusable tether system with sliding bead capsule for deorbiting small payloads. J. Spacecr. Rocket. 2018, 55, 1519–1527. [Google Scholar] [CrossRef]
- Trushlyakov, V.I.; Yudintsev, V.V. Rotary space tether system for active debris removal. J. Guid. Control. Dyn. 2020, 43, 354–364. [Google Scholar] [CrossRef]
- Wang, Q.; Jin, D.; Rui, X. Dynamic Simulation of Space Debris Cloud Capture Using the Tethered Net. Space Sci. Technol. 2021, 2021, 9810375. [Google Scholar] [CrossRef]
- Botta, E.M.; Sharf, I.; Misra, A.K. Contact Dynamics Modeling and Simulation of Tether-Nets for Space Debris Capture. J. Guid. Control. Dyn. 2017, 40, 110–123. [Google Scholar] [CrossRef]
- Shen, S.; Xing, J.; Hao, C. Cleaning space debris with a space-based laser system. Chin. J. Aeronaut. 2014, 27, 805–811. [Google Scholar] [CrossRef]
- Ledkov, A.S.; Aslanov, V.S. Review of contact and contactless active space debris removal approaches. Prog. Aerosp. Sci. 2022, 134, 100858. [Google Scholar] [CrossRef]
- Bombardelli, C.; Pelaez, J. Ion Beam Shepherd for Contactless Space Debris Removal. J. Guid. Control. Dyn. 2011, 34, 916–919. [Google Scholar] [CrossRef]
- Ledkov, A.S.; Aslanov, V.S. Active space debris removal by ion multi-beam shepherd spacecraft. Acta Astronaut. 2023, 205, 247–257. [Google Scholar] [CrossRef]
- Bourabah, D.; Field, L.; Botta, E. Estimation of uncooperative space debris inertial parameters after tether capture. Acta Astronaut. 2023, 202, 909–926. [Google Scholar] [CrossRef]
- Chu, Z.; Ma, Y.; Hou, Y.; Wang, F. Inertial parameter identification using contact force information for an unknown object captured by a space manipulator. Acta Astronaut. 2016, 131, 69–82. [Google Scholar] [CrossRef]
- Lomaka, I.A. A possible approach to the identification of inertial parameters of large-sized space debris using a specialized nanosatellite. J. Phys. Conf. Ser. 2020, 1536, 012002. [Google Scholar] [CrossRef]
- Carletta, S.; Teofilatto, P. Design and Numerical Validation of an Algorithm for the Detumbling and Angular Rate Determination of a CubeSat Using Only Three-Axis Magnetometer Data. Int. J. Aerosp. Eng. 2018, 3, 9768475. [Google Scholar] [CrossRef]
- Ovchinnikov, M.Y.; Penkov, V.I.; Roldugin, D.S.; Ivanov, D.S. Magnetic Navigation Systems of Small Satellites; Applied Mathematics; Institute of MV Keldysh of the Russian Academy of Sciences: Moskow, Russia, 2016; p. 366. [Google Scholar]
- Sedelnikov, A.V.; Orlov, D.I.; Serdakova, V.V.; Nikolaeva, A.S. The Symmetric Formulation of the Temperature Shock Problem for a Small Spacecraft with Two Elastic Elements. Symmetry 2023, 15, 172. [Google Scholar] [CrossRef]
- Filippov, A.S. Development of an effective method for ground-based testing of magnetometer sensors scientific equipment of the «MAGKOM» on small space vehicles such as «AIST». Aerosp. Instrum. 2017, 3, 37–47. [Google Scholar]
- Bennett, J.S.; Vyhnalek, B.E.; Greenall, H.; Bridge, E.M.; Gotardo, F.; Forstner, S.; Harris, G.I.; Miranda, F.A.; Bowen, W.P. Precision Magnetometers for Aerospace Applications: A Review. Sensors 2021, 21, 5568. [Google Scholar] [CrossRef] [PubMed]
- Korth, H.; Strohbehn, K.; Tejada, F.; Andreou, A.G.; Kitching, J.; Knappe, S.; Lehtonen, S.J.; London, S.M.; Kafel, M. Miniature atomic scalar magnetometer for space based on the rubidium isotope 87Rb. JGR Space Phys. 2016, 121, 7870–7880. [Google Scholar] [CrossRef] [PubMed]
- Sedelnikov, A.V. Fast Analysis of Onboard Measurements of the Earth Magnetic Field for the Purpose of Microaccelerations Decrement on Board of the “AIST” Small Spacecraft during Its Uncontrolled Orbital Flight. Int. Rev. Aerosp. Eng. 2018, 11, 76–83. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Designation | Value | Dimension |
|---|---|---|---|
| Mass | m | 530 | kg |
| Axial moments of inertia | Ixx Iyy Izz | 175 200 285 | kg·m2 |
| Maximum control torque | M | 0.2 | N·m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sedelnikov, A.V.; Orlov, D.I.; Bratkova, M.E.; Khnyryova, E.S. Estimating the Inertia Tensor Components of an Asymmetrical Spacecraft When Removing It from the Operational Orbit at the End of Its Active Life. Sensors 2023, 23, 9615. https://doi.org/10.3390/s23239615
Sedelnikov AV, Orlov DI, Bratkova ME, Khnyryova ES. Estimating the Inertia Tensor Components of an Asymmetrical Spacecraft When Removing It from the Operational Orbit at the End of Its Active Life. Sensors. 2023; 23(23):9615. https://doi.org/10.3390/s23239615
Chicago/Turabian StyleSedelnikov, A. V., D. I. Orlov, M. E. Bratkova, and E. S. Khnyryova. 2023. "Estimating the Inertia Tensor Components of an Asymmetrical Spacecraft When Removing It from the Operational Orbit at the End of Its Active Life" Sensors 23, no. 23: 9615. https://doi.org/10.3390/s23239615
APA StyleSedelnikov, A. V., Orlov, D. I., Bratkova, M. E., & Khnyryova, E. S. (2023). Estimating the Inertia Tensor Components of an Asymmetrical Spacecraft When Removing It from the Operational Orbit at the End of Its Active Life. Sensors, 23(23), 9615. https://doi.org/10.3390/s23239615