


Research on a Wire Rope Breakage Detection Device for High-Speed Operation Based on the Multistage Excitation Principle


Abstract
:1. Introduction
2. Simulation Study of Wire Rope Excitation
2.1. Wire Rope Excitation Simulation
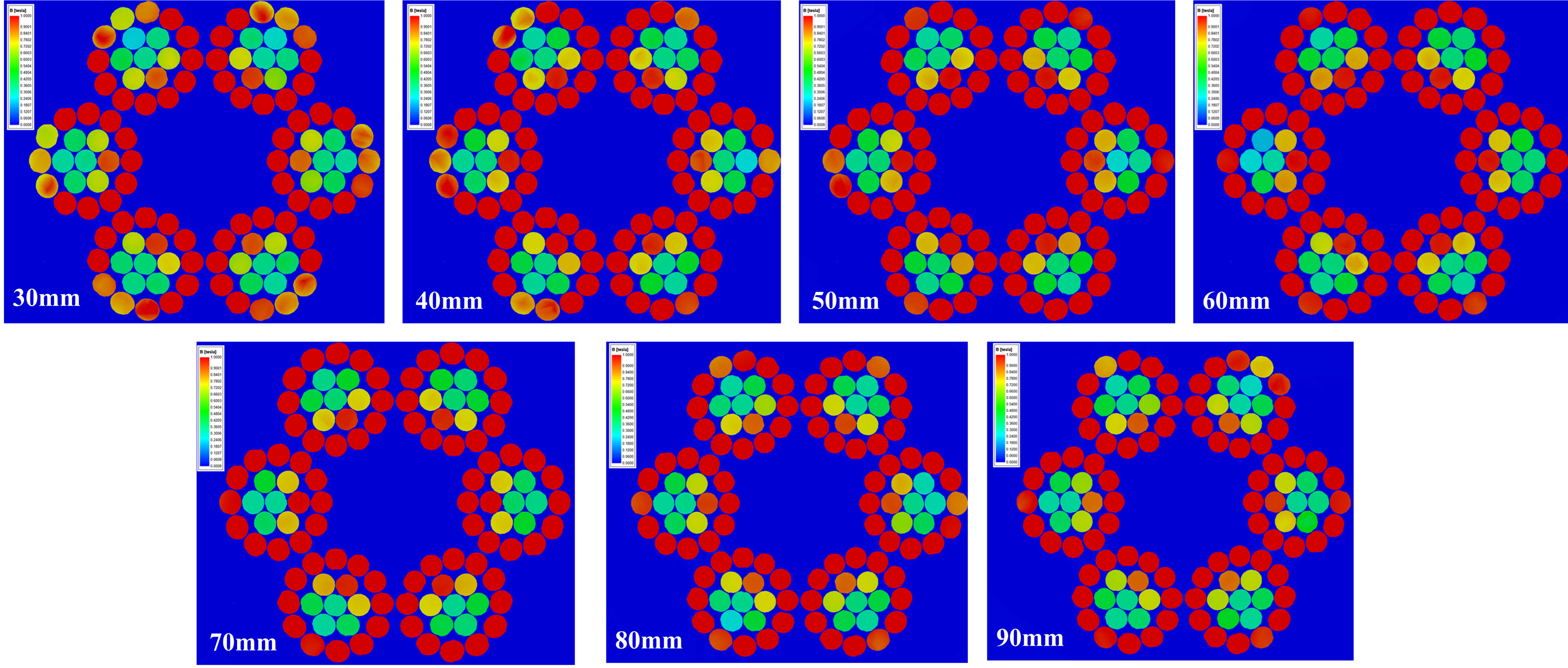
2.2. Simulation Analysis of the Transient Eddy Current Field under Different Speeds and Magnetic Stages
3. Structural Design and Excitation Simulation of a Multistage Excitation Device
3.1. Multistage Excitation Device Structure Design
3.2. Excitation Simulation
4. Experimental Study on Broken Wire Detection
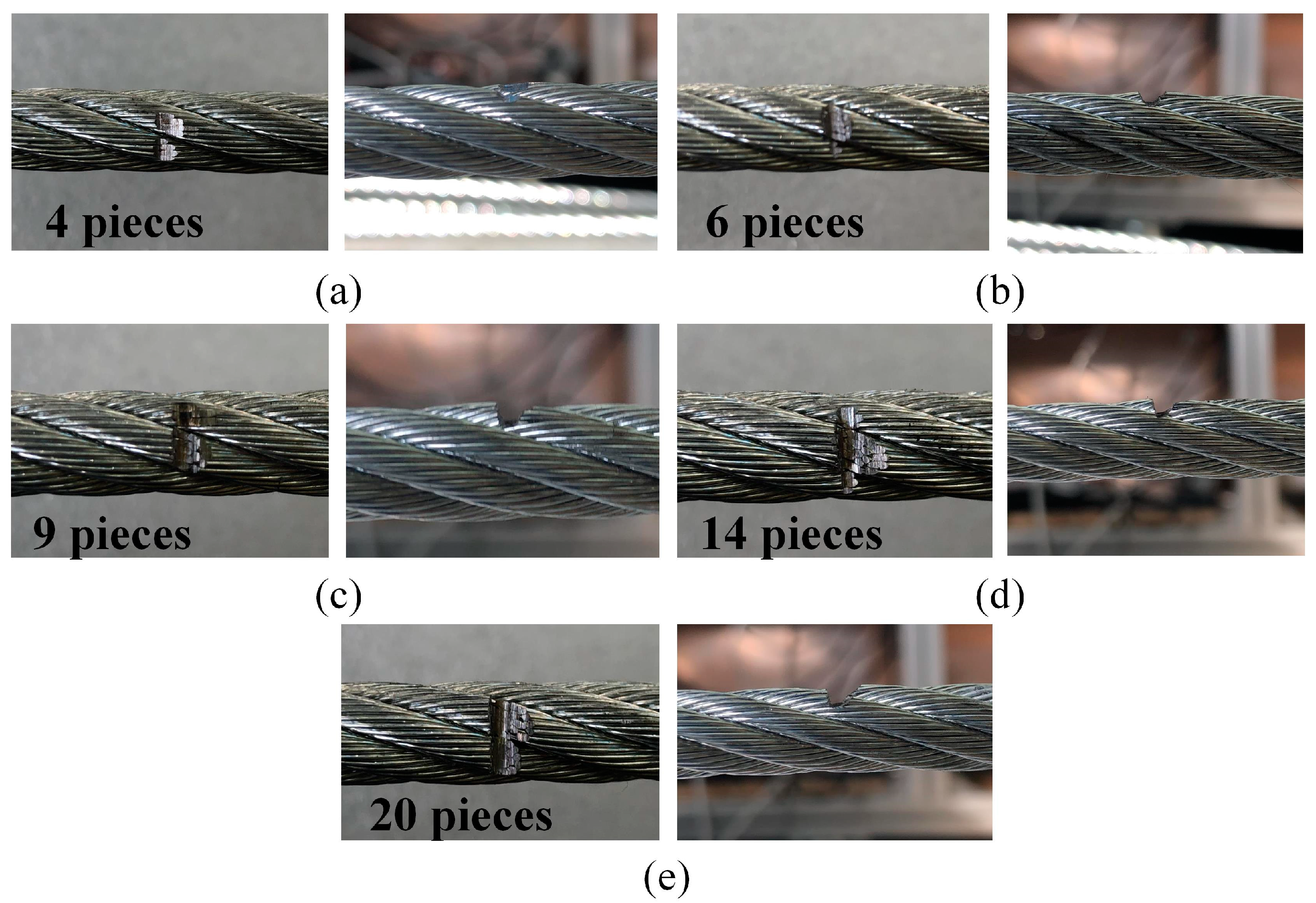
4.1. Interrupted Filament Detection Test for Different Magnetic Grades
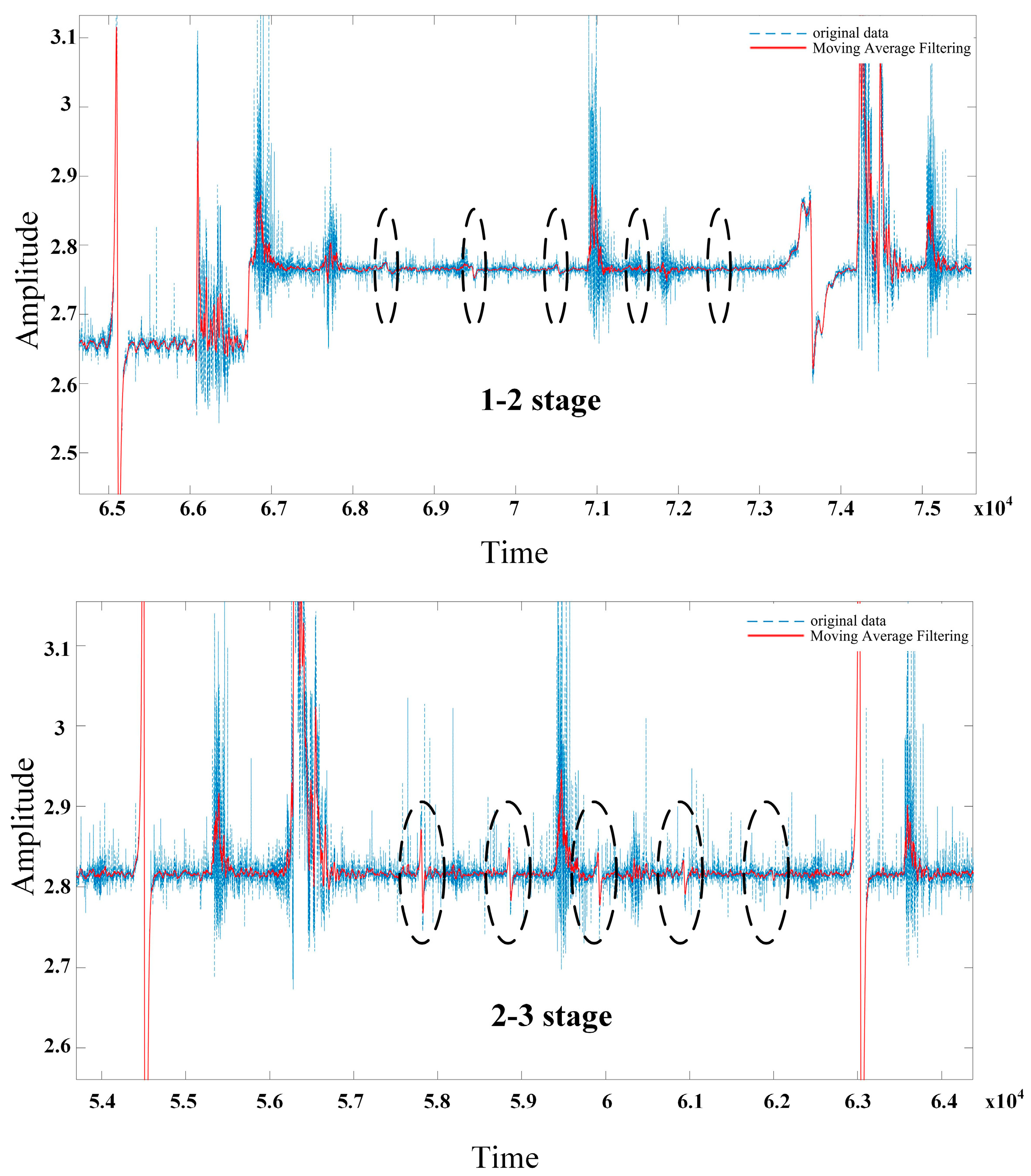
4.2. Wire Breakage Detection Test at Different Operating Speeds
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tian, J.; Zhao, C.; Wang, W.; Sun, G. Detection Technology of Mine Wire Rope Based on Radial Magnetic Vector with Flexible Printed Circuit. IEEE Trans. Instrum. Meas. 2021, 70, 3521810. [Google Scholar] [CrossRef]
- Peng, Y.; Huang, K.; Ma, C.; Zhu, Z.; Chang, X.; Lu, H.; Zhang, Q.; Xu, C. Friction and Wear of Multiple Steel Wires in a Wire Rope. Friction 2023, 11, 763–784. [Google Scholar] [CrossRef]
- Peterka, P.; Krešák, J.; Vojtko, M. Experience of the Crane Steel Wire Ropes Non-Destructive Tests. Adv. Sci. Technol. Res. J. 2018, 12, 157–163. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Zhang, E.; Yan, X. Quantitative Method for Detecting Internal and Surface Defects in Wire Rope. NDT E Int. 2021, 119, 102405. [Google Scholar] [CrossRef]
- Zhou, P.; Zhou, G.; Zhu, Z.; He, Z.; Ding, X.; Tang, C. A Review of Non-Destructive Damage Detection Methods for Steel Wire Ropes. Appl. Sci. 2019, 9, 2771. [Google Scholar] [CrossRef]
- Liu, S.; Chen, M. Wire Rope Defect Recognition Method Based on MFL Signal Analysis and 1D-CNNs. Sensors 2023, 23, 3366. [Google Scholar] [CrossRef]
- Lu, S.; Zhang, J. Quantitative Nondestructive Testing of Wire Ropes Based on Features Fusion of Magnetic Image and Infrared Image. Shock. Vib. 2019, 2019, 2041401. [Google Scholar] [CrossRef]
- Rostami, J.; Tse, P.W.; Yuan, M. Detection of Broken Wires in Elevator Wire Ropes with Ultrasonic Guided Waves and Tone-Burst Wavelet. Struct. Health Monit. 2020, 19, 481–494. [Google Scholar] [CrossRef]
- Zhou, P.; Zhou, G.; He, Z.; Tang, C.; Zhu, Z.; Li, W. A Novel Texture-Based Damage Detection Method for Wire Ropes. Meas. J. Int. Meas. Confed. 2019, 148, 106954. [Google Scholar] [CrossRef]
- Zhang, Y.; Jing, L.; Xu, W.; Zhan, W.; Tan, J. A Sensor for Broken Wire Detection of Steel Wire Ropes Based on the Magnetic Concentrating Principle. Sensors 2019, 19, 3763. [Google Scholar] [CrossRef]
- Liu, S.; Sun, Y.; Jiang, X.; Kang, Y. A Review of Wire Rope Detection Methods, Sensors and Signal Processing Techniques. J. Nondestruct. Eval. 2020, 39, 85. [Google Scholar] [CrossRef]
- Feng, J.; Li, F.; Lu, S.; Liu, J.; Ma, D. Injurious or Noninjurious Defect Identification from MFL Images in Pipeline Inspection Using Convolutional Neural Network. IEEE Trans. Instrum. Meas. 2017, 66, 1883–1892. [Google Scholar] [CrossRef]
- Ni, Y.; Zhang, Q.; Xin, R. Magnetic Flux Detection and Identification of Bridge Cable Metal Area Loss Damage. Meas. J. Int. Meas. Confed. 2020, 167, 108443. [Google Scholar] [CrossRef]
- Feng, B.; Ribeiro, A.L.; Rocha, T.J.; Ramos, H.G. Comparison of Inspecting Non-Ferromagnetic and Ferromagnetic Metals Using Velocity Induced Eddy Current Probe. Sensors 2018, 18, 3199. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Wu, X.; Ouyang, Q.; Wang, J. A Novel Broken Wire Evaluation Method for Bridge Cable Magnetic Flux Leakage Testing under Lift-off Uncertainty. J. Magn. Magn. Mater. 2023, 570, 170525. [Google Scholar] [CrossRef]
- Sanchis, R.; Cardona, S.; Martinez, J. Determination of the Vertical Vibration of a Ballasted Railway Track to Be Used in the Experimental Detection of Wheel Flats in Metropolitan Railways. J. Vib. Acoust. 2018, 141, 021015. [Google Scholar] [CrossRef]
- Pan, S.; Zhang, D.; Zhang, E. Analysis of the Eccentric Problem of Wire Rope Magnetic Flux Leakage Testing. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; pp. 1597–1601. [Google Scholar] [CrossRef]
- Zhang, J.; Peng, F.; Chen, J. Quantitative Detection of Wire Rope Based on Three-Dimensional Magnetic Flux Leakage Color Imaging Technology. IEEE Access 2020, 8, 104165–104174. [Google Scholar] [CrossRef]
- Kim, J.W.; Park, S. Magnetic Flux Leakage Sensing and Artificial Neural Network Pattern Recognition-Based Automated Damage Detection and Quantification for Wire Rope Non-Destructive Evaluation. Sensors 2018, 18, 109. [Google Scholar] [CrossRef]
- Kaur, A.; Gupta, A.; Aggarwal, H.; Arora, K.; Garg, N.; Sharma, M.; Sharma, S.; Aggarwal, N.; Sapra, G.; Goswamy, J.K. Non-Destructive Evaluation and Development of a New Wire Rope Tester Using Parallely Magnetized NdFeB Magnet Segments. J. Nondestruct. Eval. 2018, 37, 61. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, D.; Pan, S.; Zhang, E.; Gao, W. Online Nondestructive Testing for Fine Steel Wire Rope in Electromagnetic Interference Environment. NDT E Int. 2017, 92, 75–81. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, S.; He, L.; Kang, Y. A New Detection Sensor for Wire Rope Based on Open Magnetization Method. Mater. Eval. 2017, 75, 501–509. [Google Scholar]
- Yan, X.; Zhang, D.; Zhao, F. Improve the Signal to Noise Ratio and Installation Convenience of the Inductive Coil for Wire Rope Nondestructive Testing. NDT E Int. 2017, 92, 221–227. [Google Scholar] [CrossRef]
- Wang, H.; Tian, J.; Li, X.; Lv, X. Inspection of Mine Wire Rope Using Magnetic Aggregation Bridge Based on Magnetic Resistance Sensor Array. IEEE Trans. Instrum. Meas. 2020, 69, 7437–7448. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, E.; Pan, S. Fractal Dimension Algorithm for MFL of Corrosion Damage in Wire Rope. Mater. Eval. 2020, 78, 1140–1149. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, B.; Zhang, Z. Research on Quantitative Detection of Wire Rope Damage Based on Weak Magnetic Excitation. Russ. J. Nondestruct. Test. 2022, 58, 1162–1174. [Google Scholar] [CrossRef]
- Ye, Y.; Ji, K.; Wang, P. Influences of Magnetization Direction on the Flux Leakage Field of Weld Defects. Coatings 2023, 13, 1005. [Google Scholar] [CrossRef]
- Coramik, M.; Citak, H.; Ege, Y.; Bicakci, S.; Gunes, H. Determining the Effect of Velocity on Sensor Selection and Position in Non-Destructive Testing with Magnetic Flux Leakage Method: A Pipe Inspection Gauge Design Study with ANSYS Maxwell. IEEE Trans. Instrum. Meas. 2023, 72, 9508412. [Google Scholar] [CrossRef]
- Zhou, J.; Tian, J.; Wang, H.; Li, Y.; Wu, M. Numerical Simulation of Magnetic Excitation Based on a Permanent Magnet Co-Directional Array Sensor. Insight Non-Destr. Test. Cond. Monit. 2018, 60, 568–574. [Google Scholar] [CrossRef]
- Wang, H.; Tian, J.; Meng, G. A Sensor Model for Defect Detection in Mine Hoisting Wire Ropes Based on Magnetic Focusing. Insight Non-Destr. Test. Cond. Monit. 2017, 59, 143–148. [Google Scholar] [CrossRef]
- Feng, B.; WU, J.; Qiu, G.; Kang, Y. Development of high-speed magnetic flux leakage testing method. Nondestruct. Testing. 2021, 43, 7. [Google Scholar] [CrossRef]
- Mazurek, P. A Comprehensive Review of Steel Wire Rope Degradation Mechanisms and Recent Damage Detection Methods. Sustainability 2023, 15, 5441. [Google Scholar] [CrossRef]
- Ji, K.; Wang, P.; Jia, Y.; Ye, Y.; Ding, S. Adaptive Filtering Method of MFL Signal on Rail Top Surface Defect Detection. IEEE Access 2021, 9, 87351–87359. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, C.; Jiang, X.; Sun, Y.; Jiang, X.; Li, R.; He, L. The Research of 30 Mm Detecting Distance of Testing Device for Wire Rope Based on Open Magnetizer. Appl. Sci. 2022, 12, 4829. [Google Scholar] [CrossRef]
- Tian, J.; Wang, H. Research on Magnetic Excitation Model of Magnetic Flux Leakage for Coal Mine Hoisting Wire Rope. Adv. Mech. Eng. 2015, 7, 1687814015618626. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Operating Principle | Advantage | Disadvantage | |
|---|---|---|---|---|
| Infrared detection method | Extracting Infrared Feature Parameters of Objects | No need for contact measurement | High cost | |
| Acoustic emission method | Measurement of ultrasonic waves emitted by structural changes in objects | Only valid in the static load section | ||
| Current method | Measuring the Ohmic Resistance of Objects | Measurement of the cross-sectional condition | Difficulty in detection | |
| Ultrasonic guided wave testing | Ultrasonic wave propagation in medium | Unable to reflect the overall situation | ||
| Optical detection | Camera detection | High detection accuracy | High cost | |
| X-ray method | Strong X- or γ-ray vertical radiation object | Detect broken wires | High cost and inability to continuously measure | |
| Electromagnetic testing method | Eddy current testing method | Eddy current effect | No need for contact measurement | Only surface damage detected |
| Magnetic memory detection method | Magnetic memory effect | No external incentives required | Susceptible to external magnetic field interference | |
| Magnetic flux leakage testing method | Hysteresis phenomenon | High detection accuracy | Large device volume | |
| Number of Broken Wires (Pieces) | Peak-to-Peak Value of Signal between Stages 1 and 2 (V) | Peak-to-Peak Value of Signal between Stages 2 and 3 (V) |
|---|---|---|
| 4 | 0.00437 | 0.01309 |
| 6 | 0.00821 | 0.03917 |
| 9 | 0.01369 | 0.06205 |
| 14 | 0.0169 | 0.06643 |
| 20 | 0.0175 | 0.09952 |
| Number of Broken Wires (Pieces) | Peak-to-Peak Value of the Signal between Stages 1 and 2 (V) |
|---|---|
| 0 | 0.00463 |
| 4 | 0.02226 |
| 6 | 0.04821 |
| 9 | 0.06226 |
| 14 | 0.08 |
| 20 | 0.08726 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Zhang, X.; Deng, R.; Han, L.; Zhou, M.; Ma, Z.; Chang, X.; Peng, Y. Research on a Wire Rope Breakage Detection Device for High-Speed Operation Based on the Multistage Excitation Principle. Sensors 2023, 23, 9298. https://doi.org/10.3390/s23239298
Zhou Z, Zhang X, Deng R, Han L, Zhou M, Ma Z, Chang X, Peng Y. Research on a Wire Rope Breakage Detection Device for High-Speed Operation Based on the Multistage Excitation Principle. Sensors. 2023; 23(23):9298. https://doi.org/10.3390/s23239298
Chicago/Turabian StyleZhou, Zhou, Xiuheng Zhang, Ran Deng, Lu Han, Meng Zhou, Zhuangzhuang Ma, Xiangdong Chang, and Yuxing Peng. 2023. "Research on a Wire Rope Breakage Detection Device for High-Speed Operation Based on the Multistage Excitation Principle" Sensors 23, no. 23: 9298. https://doi.org/10.3390/s23239298
APA StyleZhou, Z., Zhang, X., Deng, R., Han, L., Zhou, M., Ma, Z., Chang, X., & Peng, Y. (2023). Research on a Wire Rope Breakage Detection Device for High-Speed Operation Based on the Multistage Excitation Principle. Sensors, 23(23), 9298. https://doi.org/10.3390/s23239298