



Research and Implementation of Millet Ear Detection Method Based on Lightweight YOLOv5

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
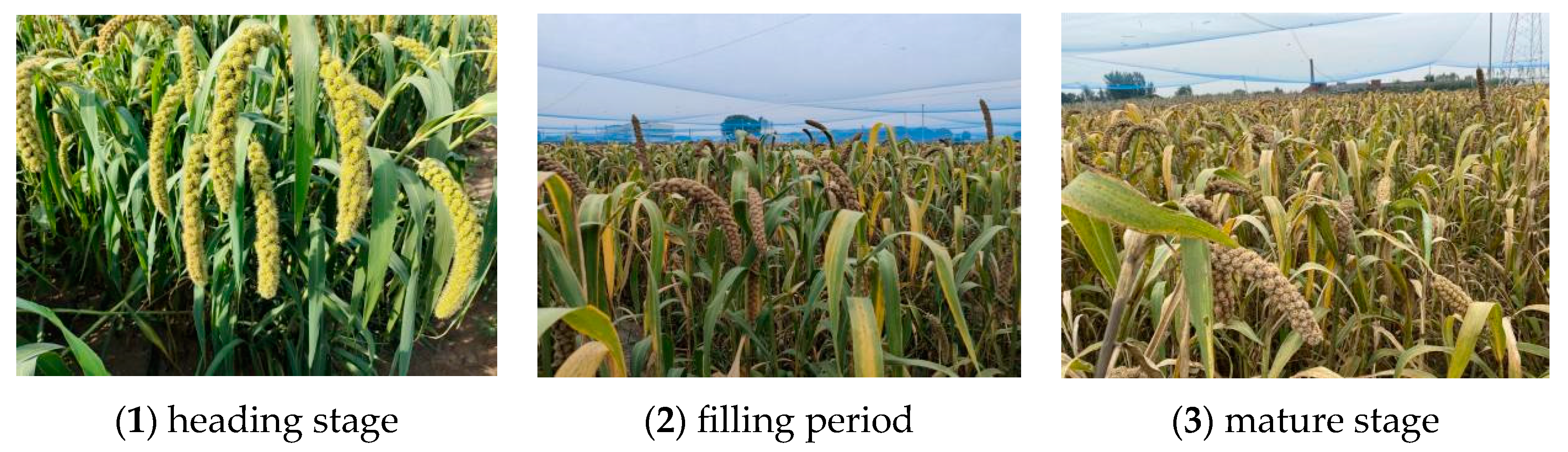
2.1. Image Acquisition
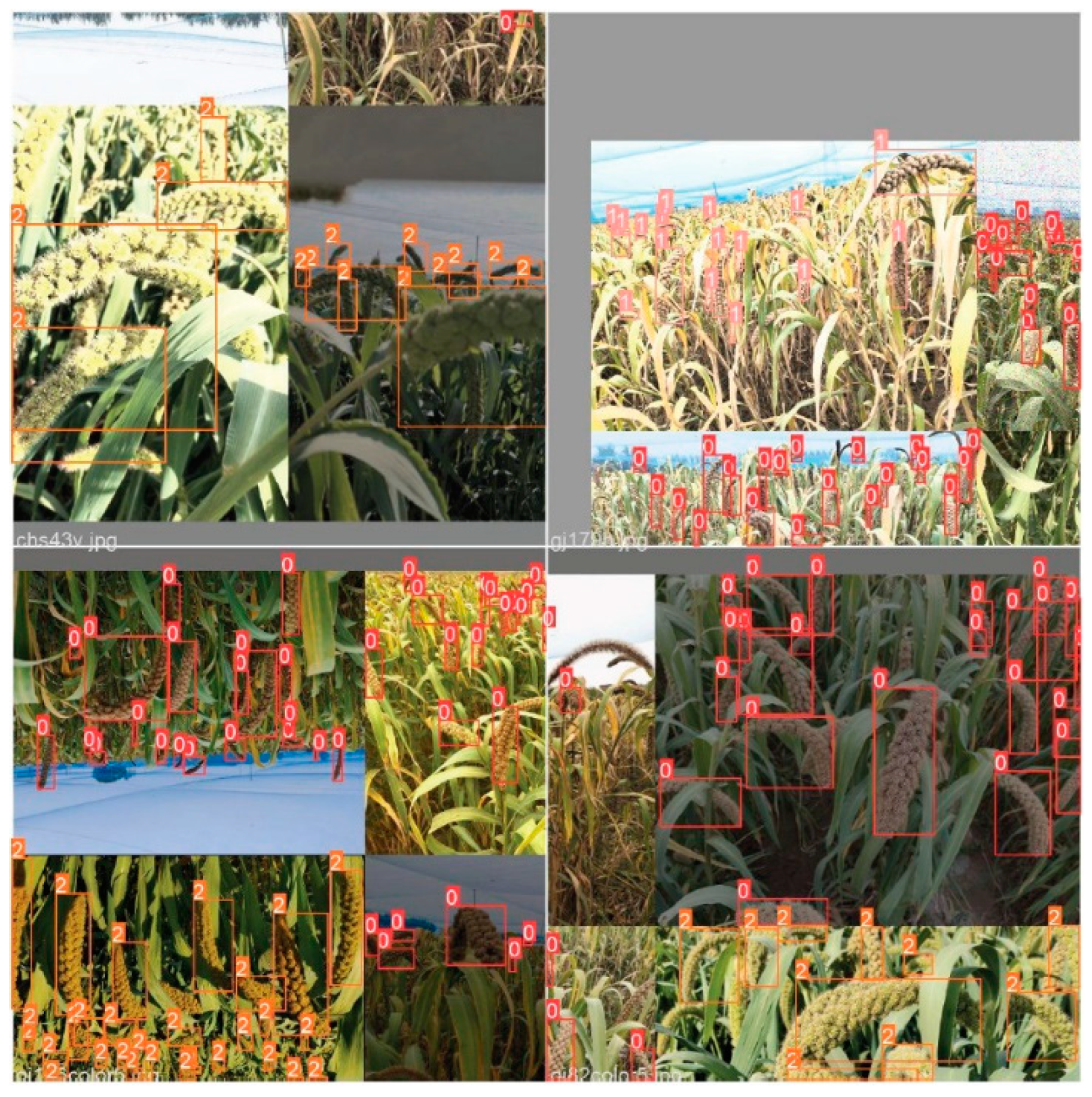
2.2. Image Preprocessing
2.3. YoloV5 Model and Its Improvement
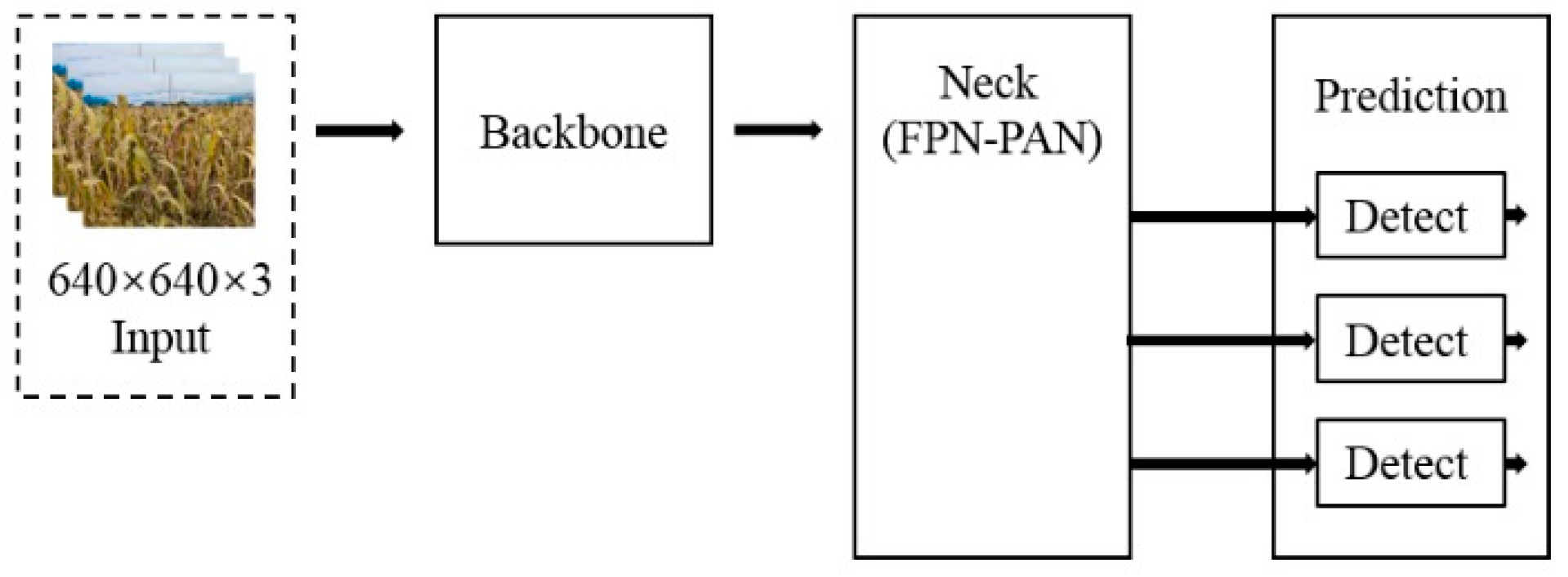
2.3.1. YoloV5 Model
2.3.2. Improvement of YoloV5 Model
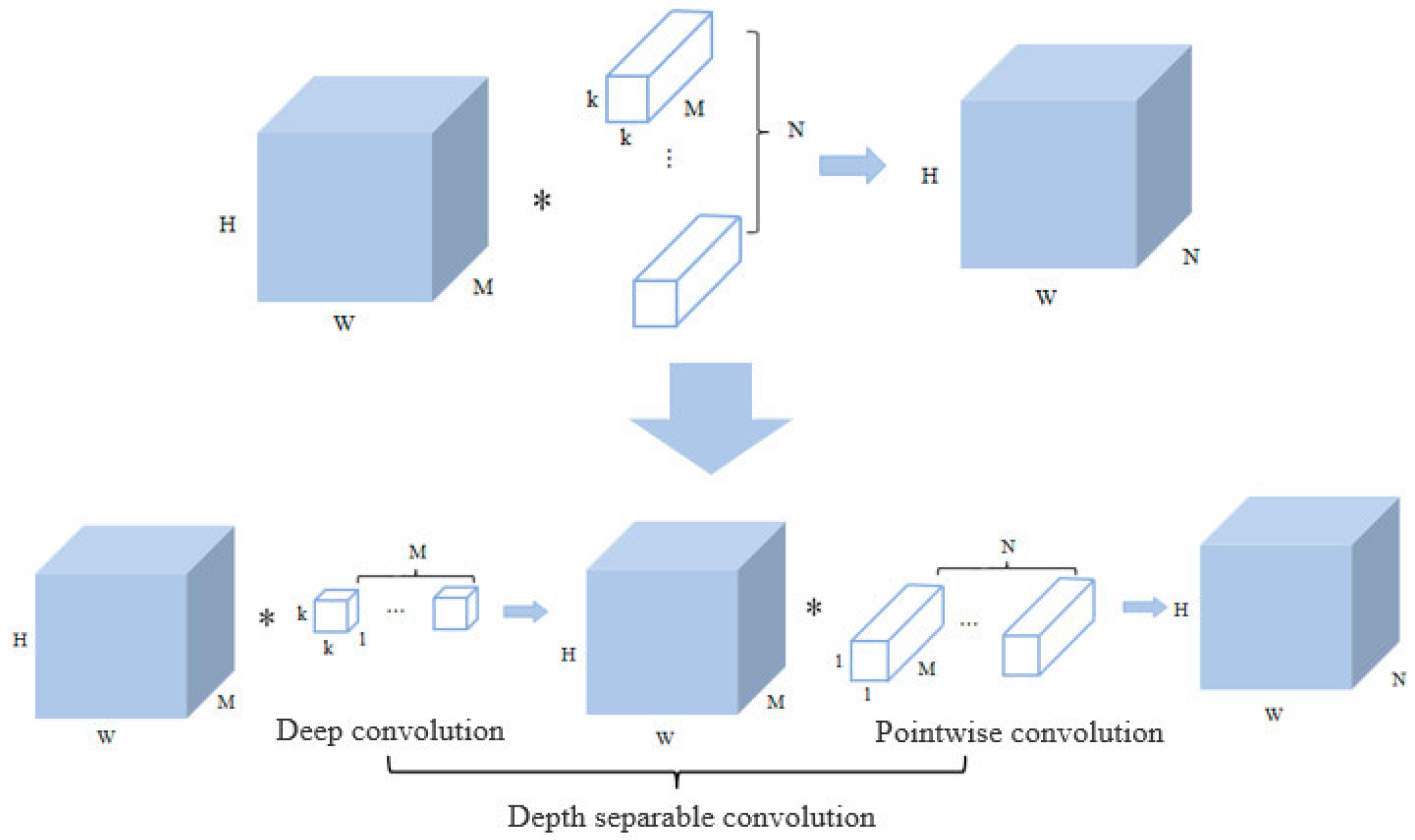
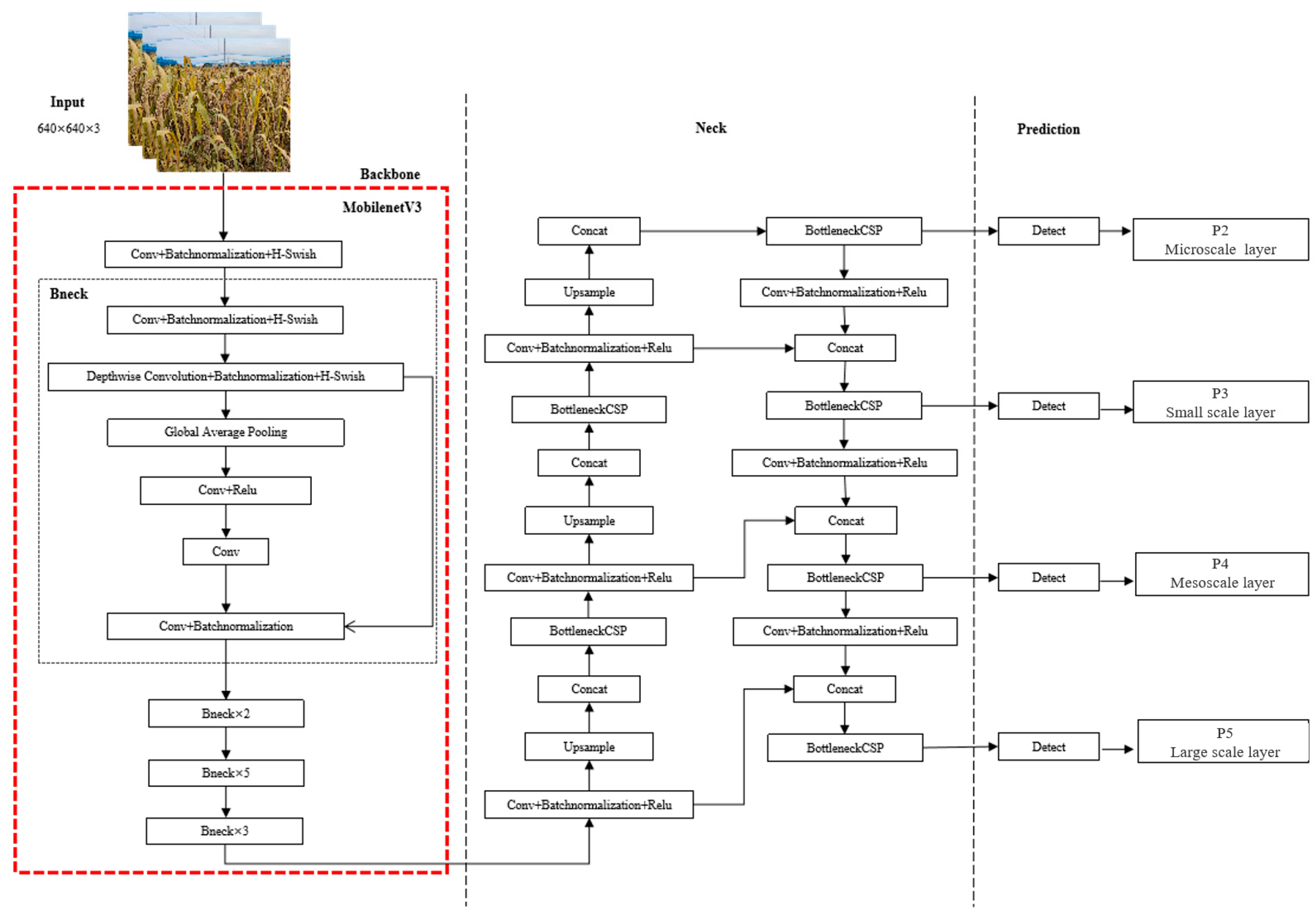
Use MobilenetV3 to Modify the Model Structure of YoloV5
Merge-NMS Algorithm
Improvement of Multi-Feature Fusion Detection Structure
2.3.3. Millet Ear Detection Model Based on Lightweight YoloV5
2.4. Jetson Nano Platform Test
2.4.1. Evaluating Indicator
2.4.2. Platform Deployment
3. Results and Discussion
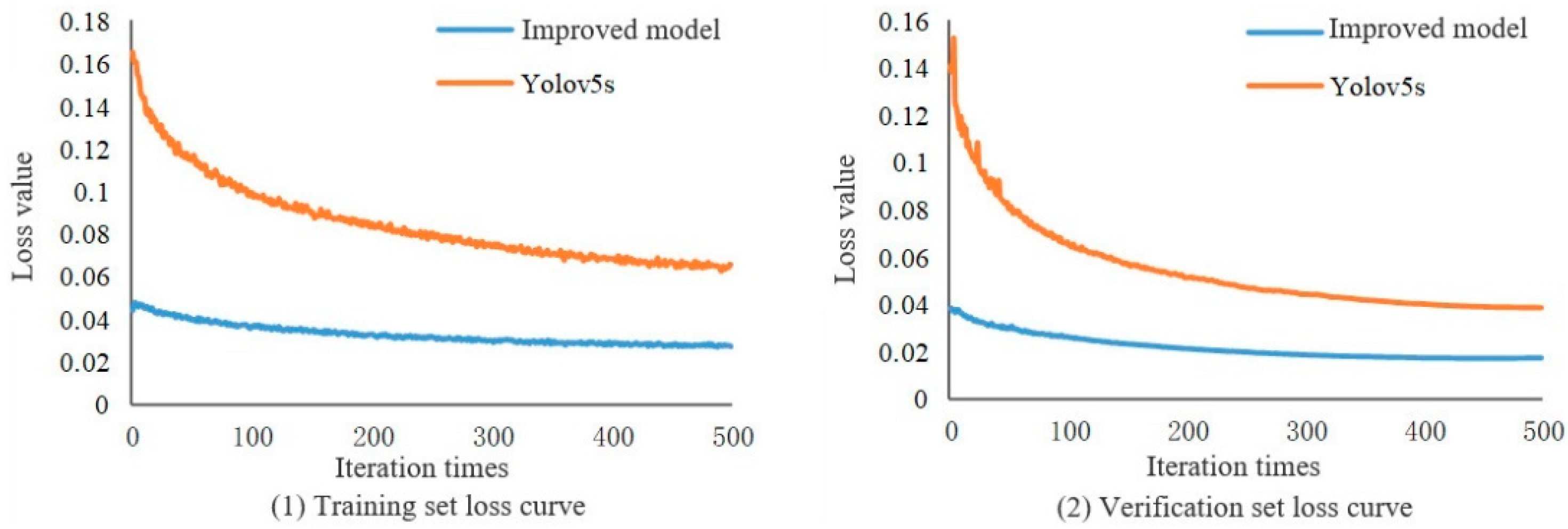
3.1. Analysis of Training Results
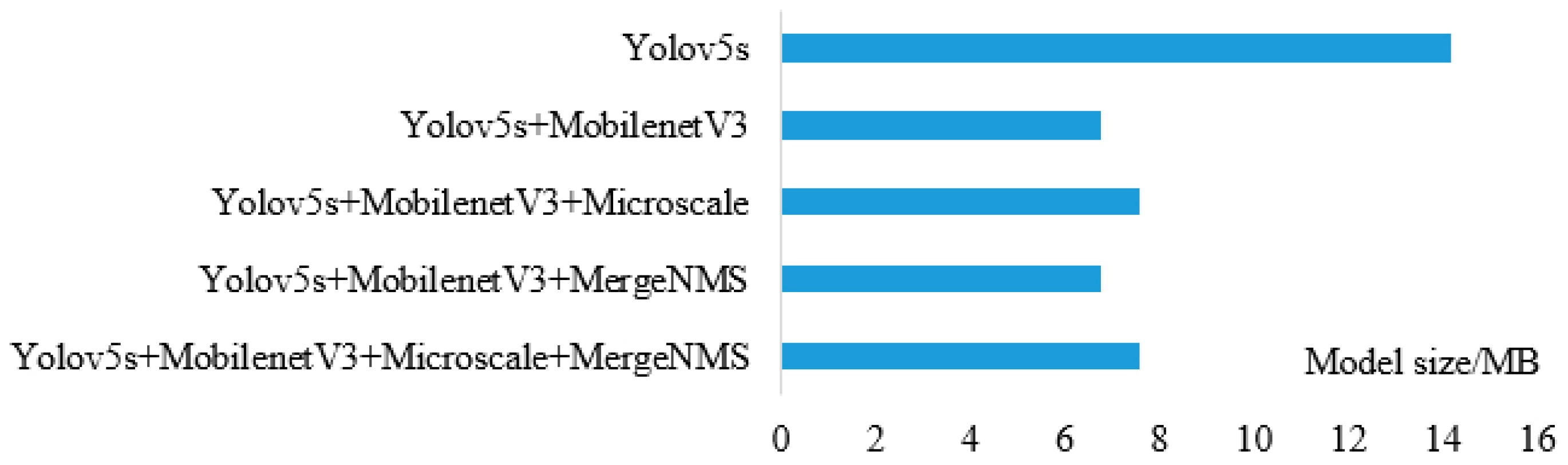
3.2. Performance Comparison of Model Improvement
3.3. Comprehensive Comparison of Different Target Detection Networks
3.4. Monitoring Results of Jetson Nano
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, S.; Liu, F.; Liu, M.; Cheng, R.; Xia, E.; Diao, X. Current status and future prospective of foxtail millet production and seed industry in China. Sci. Agric. Sin. 2021, 54, 459–470. [Google Scholar] [CrossRef]
- Sanaeifar, A.; Guindo, M.; Bakhshipour, A.; Fazayeli, H.; Li, X.; Yang, C. Advancing precision agriculture: The potential of deep learning for cereal plant head detection. Comput. Electron. Agric. 2023, 209, 107875. [Google Scholar] [CrossRef]
- Rai, N.; Zhang, Y.; Ram, B.; Schumacher, L.; Yellavajjala, R.; Bajwa, S.; Sun, X. Applications of deep learning in precision weed management: A review. Comput. Electron. Agric. 2023, 206, 107698. [Google Scholar] [CrossRef]
- Amirhossein, Z.; Zheng, L.; Gaozhi, X.; Pankaj, B.; Jatinder, S.S.; Yuefeng, R. AutoOLA: Automatic object level augmentation for wheat spikes counting. Comput. Electron. Agric. 2023, 205, 107623. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, J.; Xue, T.; Wang, S.; Qiu, X.; Yao, X.; Tian, Y.; Zhu, Y.; Cao, W.; Zhang, X. A deep learning method for oriented and small wheat spike detection (OSWSDet) in UAV images. Comput. Electron. Agric. 2022, 198, 107087. [Google Scholar] [CrossRef]
- Zhang, Q.; Hu, S.; Shu, W.; Cheng, H. Wheat spikes detection method based on pyramidal network of attention mechanism. Trans. Chin. Soc. Agric. Eng. 2021, 52, 253–262. [Google Scholar] [CrossRef]
- Yang, W.; Duan, L.; Yang, W. Deep learning-based extraction of rice phenotypic characteristics and prediction of rice panicle weight. J. Huazhong Agric. Univ. 2021, 40, 227–235. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiao, D.; Liu, Y.; Wu, H. An algorithm for automatic identification of multiple developmental stages of rice spikes based on improved Faster R-CNN. Crop J. 2022, 10, 1323–1333. [Google Scholar] [CrossRef]
- Tan, S.; Lu, H.; Yu, J.; Lan, M.; Hu, X.; Zheng, H.; Peng, Y.; Wang, Y.; Li, Z.; Qi, L.; et al. In-field rice panicles detection and growth stages recognition based on RiceRes2Net. Comput. Electron. Agric. 2023, 206, 107704. [Google Scholar] [CrossRef]
- Zhou, C.; Ye, H.; Hu, J.; Shi, X.; Hua, S.; Yue, J.; Xu, Z.; Yang, G. Automated Counting of Rice Panicle by Applying Deep Learning Model to Images from Unmanned Aerial Vehicle Platform. Sensors 2019, 19, 3106. [Google Scholar] [CrossRef]
- Bao, L.; Wang, M.; Liu, J.; Wen, B.; Ming, Y. Estimation method of wheat yield based on convolution neural network. Acta Agric. Zhejiangensis 2020, 32, 2244–2252. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Y.; Li, Y.; Ma, J.; Du, K. Detection and counting system for winter wheat ears based on convolutional neural network. Trans. Chin. Soc. Agric. Eng. 2019, 50, 144–150. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, Y.; Huang, L.; Zhao, F. Research of wheat ear target detection based on convolutional neural network. Soft Eng. 2021, 24, 6–10. [Google Scholar] [CrossRef]
- Bao, W.; Zhang, X.; Hu, G.; Huang, L.; Liang, D.; Lin, Z. Estimation and counting of wheat ears density in field based on deep convolutional neural network. Trans. CSAE 2020, 36, 186–193. [Google Scholar] [CrossRef]
- Xu, X.; Qiao, H.; Ma, X.; Yin, G.; Wang, Y.; Zhao, J.; Li, H. An automatic wheat ear counting model based on the minimum area intersection ratio algorithm and transfer learning. Measurement 2023, 216, 112849. [Google Scholar] [CrossRef]
- Liu, Z.; Yuan, D.; Wang, E. Automatic counting method of wheat grain based on improved bayes matting algorithm. J. Agric. Sci. Technol. 2020, 22, 75–82. [Google Scholar] [CrossRef]
- Xie, Y.; He, C.; Yu, Z.; Shen, Y.; Jiang, H.; Liang, J. Optimization method for cascade network of wheat ear detection in complex filed scene. Trans. Chin. Soc. Agric. Eng. 2020, 51, 212–219. [Google Scholar] [CrossRef]
- Jiang, H.; Xu, C.; Chen, Y.; Cheng, Y. Detecting and counting method for small-sized and occluded rice panicles based on in-field images. Trans. Chin. Soc. Agric. Eng. 2020, 51, 152–162. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiao, D.; Chen, H.; Liu, Y. Rice panicle detection method based on improved faster R-CNN. Trans. Chin. Soc. Agric. Eng. 2020, 51, 231–240. [Google Scholar] [CrossRef]
- Jiang, Q.; Huang, Z.; Xu, G.; Su, Y. MIoP-NMS: Perfecting crops target detection and counting in dense occlusion from high-resolution UAV imagery. Smart Agric. Technol. 2023, 4, 100226. [Google Scholar] [CrossRef]
- Bao, W.; Yang, X.; Liang, D.; Hu, G.; Yang, X. Lightweight convolutional neural network model for field wheat ear disease identification. Comput. Electron. Agric. 2021, 189, 106367. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, X.; Yan, J.; Qiu, X.; Yao, X.; Tian, Y.; Zhu, Y.; Cao, W. A Wheat Spike Detection Method in UAV Images Based on Improved YOLOv5. Remote Sens. 2021, 13, 3095. [Google Scholar] [CrossRef]
- Yang, Q.; Li, W.; Yang, X.; Yue, L.; Li, H. Improved YOLOv5 method for detecting growth status of apple flowers. Comput. Eng. Appl. 2022, 58, 237–246. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Z.; Li, J.; Wang, H.; Li, D. Potato detection in complex environment based on improved YOLOv4 model. Trans. CSAE. 2021, 51, 212–219. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Yan, B.; Fan, P.; Lei, X.; Liu, Z.; Yang, F. A Real-Time Apple Targets Detection Method for Picking Robot Based on Improved YOLOv5. Remote Sens. 2021, 13, 1619. [Google Scholar] [CrossRef]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Vasudevan, V.; et al. Searching for mobilenetv3. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1314–1324. [Google Scholar]
- Wang, C.; Wang, H.; Yu, F.; Xia, W. A High-Precision Fast Smoky Vehicle Detection Method Based on Improved YOLOv5 Network. In Proceedings of the 2021 IEEE International Conference on Artificial Intelligence and Industrial Design (AIID), Guangzhou, China, 28–30 May 2021; pp. 255–259. [Google Scholar] [CrossRef]
- Sun, X.; Liu, Y.; Yan, Z.; Wang, P.; Fu, K. SRAF-Net: Shape Robust Anchor-Free Network for Garbage Dumps in Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2020, 59, 6154–6168. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| YOLOv5s | Mobilenetv3 | Microscale | Merge-NMS | Average Accuracy/% | Precision/% | Recall Ratio/% | F1/% | Floating-Point | Time/s | Percentage |
|---|---|---|---|---|---|---|---|---|---|---|
| √ | 99.40 | 98.90 | 98.30 | 98.60 | 16.8 | 0.020 | 82.61 | |||
| √ | √ | 95.20 | 95.70 | 90.00 | 92.76 | 5.9 | 0.010 | 86.96 | ||
| √ | √ | √ | 97.70 | 94.30 | 93.80 | 94.05 | 8.5 | 0.028 | 78.26 | |
| √ | √ | √ | 95.56 | 95.10 | 90.70 | 92.70 | 5.9 | 0.015 | 86.96 | |
| √ | √ | √ | √ | 97.78 | 94.70 | 93.70 | 94.20 | 8.5 | 0.023 | 91.30 |
| √ | √ | 99.40 | 99.10 | 97.60 | 98.34 | 19.3 | 0.030 | 86.96 | ||
| √ | √ | 99.40 | 98.80 | 97.90 | 98.35 | 16.8 | 0.022 | 86.96 | ||
| √ | √ | √ | 99.40 | 98.70 | 97.90 | 98.30 | 19.3 | 0.030 | 86.96 |
| Model | Precision/% | Recall Ratio/% | TP | FP | FN |
|---|---|---|---|---|---|
| YOLOv5s + Mobilenetv3 | 95.70 | 90.00 | 2587 | 115 | 286 |
| YOLOv5s + Mobilenetv3 + Merge-NMS | 95.10 | 90.70 | 2599 | 135 | 265 |
| Improved model | 94.70 | 93.70 | 2684 | 149 | 180 |
| Model | Precision/% | Recall Ratio/% | F1/% | Average Accuracy/% | Size/MB | Floating-Point | Time/s |
|---|---|---|---|---|---|---|---|
| YOLOv3 | 98.40 | 98.00 | 98.20 | 99.40 | 18.05 | 23.2 | 0.034 |
| YOLOv3-tiny | 90.00 | 77.60 | 83.34 | 84.90 | 4.22 | 3.3 | 0.009 |
| YOLOv5-shufflenetv2 | 92.40 | 88.60 | 90.46 | 94.20 | 2.68 | 3.8 | 0.012 |
| Improved model | 94.70 | 93.70 | 94.20 | 97.70 | 7.56 | 8.5 | 0.023 |
| Model | Size/MB | mAP/% | FPS |
|---|---|---|---|
| YOLOv5s | 14.19 | 96.40 | 6.97 |
| YOLOv5s-MobileNetV3s- Multiscale-MergeNMS | 7.56 | 91.80 | 6.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, S.; Li, Y.; Gao, J.; Li, X.; Yuan, X.; Liu, Z.; Cui, Q.; Wu, C. Research and Implementation of Millet Ear Detection Method Based on Lightweight YOLOv5. Sensors 2023, 23, 9189. https://doi.org/10.3390/s23229189
Qiu S, Li Y, Gao J, Li X, Yuan X, Liu Z, Cui Q, Wu C. Research and Implementation of Millet Ear Detection Method Based on Lightweight YOLOv5. Sensors. 2023; 23(22):9189. https://doi.org/10.3390/s23229189
Chicago/Turabian StyleQiu, Shujin, Yun Li, Jian Gao, Xiaobin Li, Xiangyang Yuan, Zhenyu Liu, Qingliang Cui, and Cuiqing Wu. 2023. "Research and Implementation of Millet Ear Detection Method Based on Lightweight YOLOv5" Sensors 23, no. 22: 9189. https://doi.org/10.3390/s23229189
APA StyleQiu, S., Li, Y., Gao, J., Li, X., Yuan, X., Liu, Z., Cui, Q., & Wu, C. (2023). Research and Implementation of Millet Ear Detection Method Based on Lightweight YOLOv5. Sensors, 23(22), 9189. https://doi.org/10.3390/s23229189