
Detection of Road Potholes by Applying Convolutional Neural Network Method Based on Road Vibration Data



Abstract
:1. Introduction
2. Literature Review
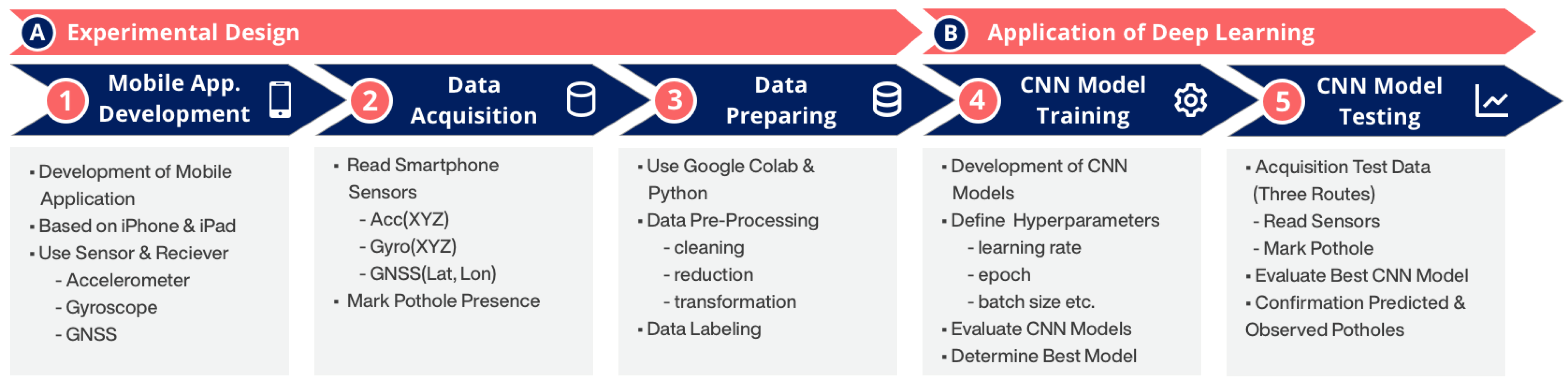
3. Methodology and Experimental Design
3.1. Experimental Design
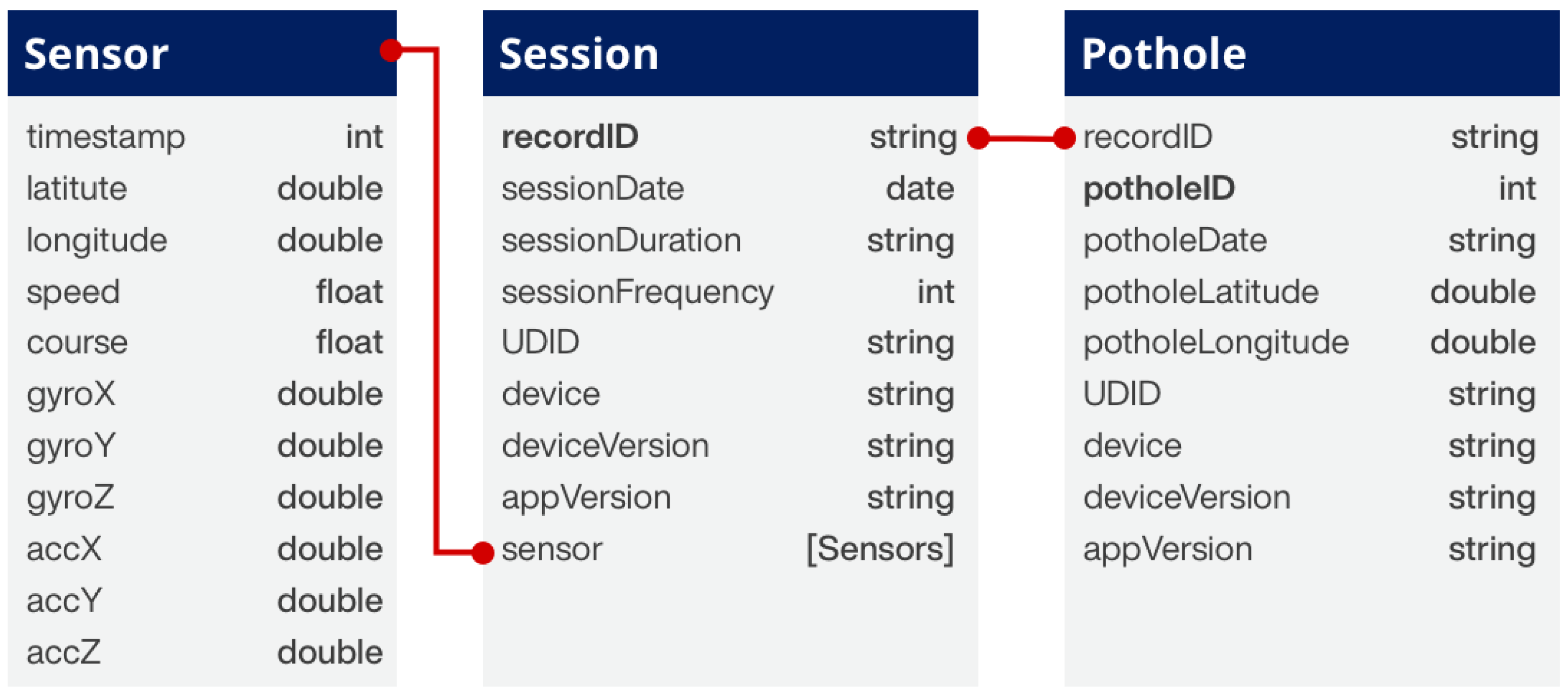
3.1.1. Development of Mobile Application
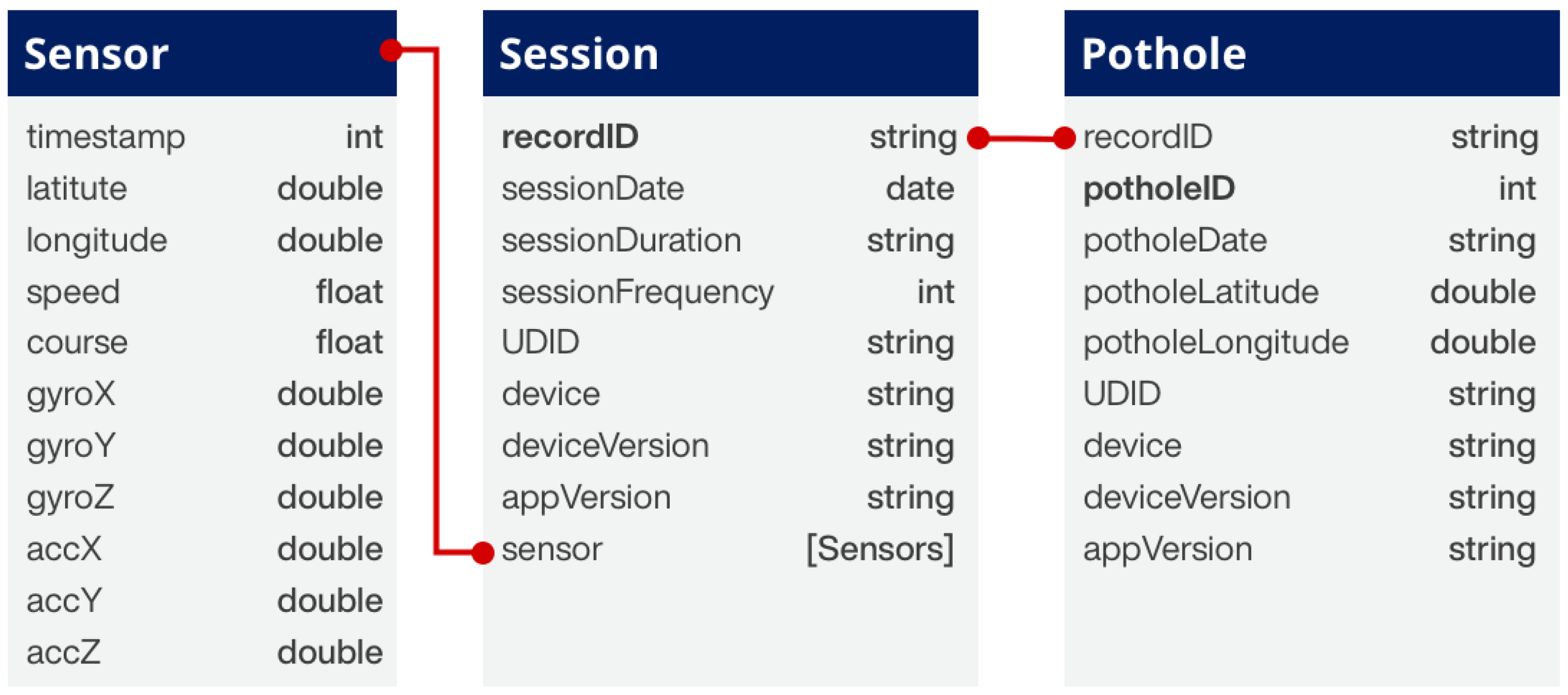
3.1.2. Data Acquisition
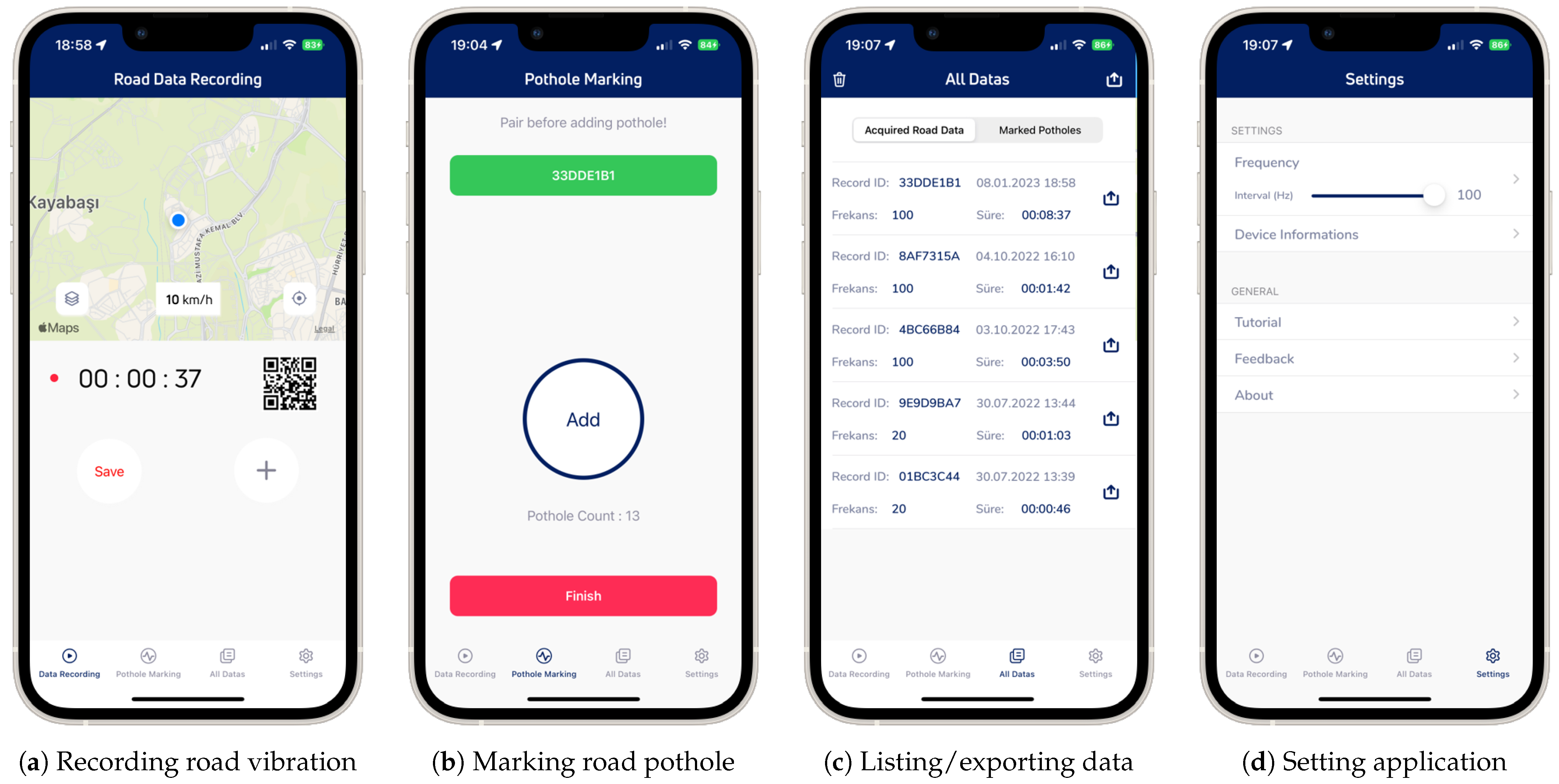
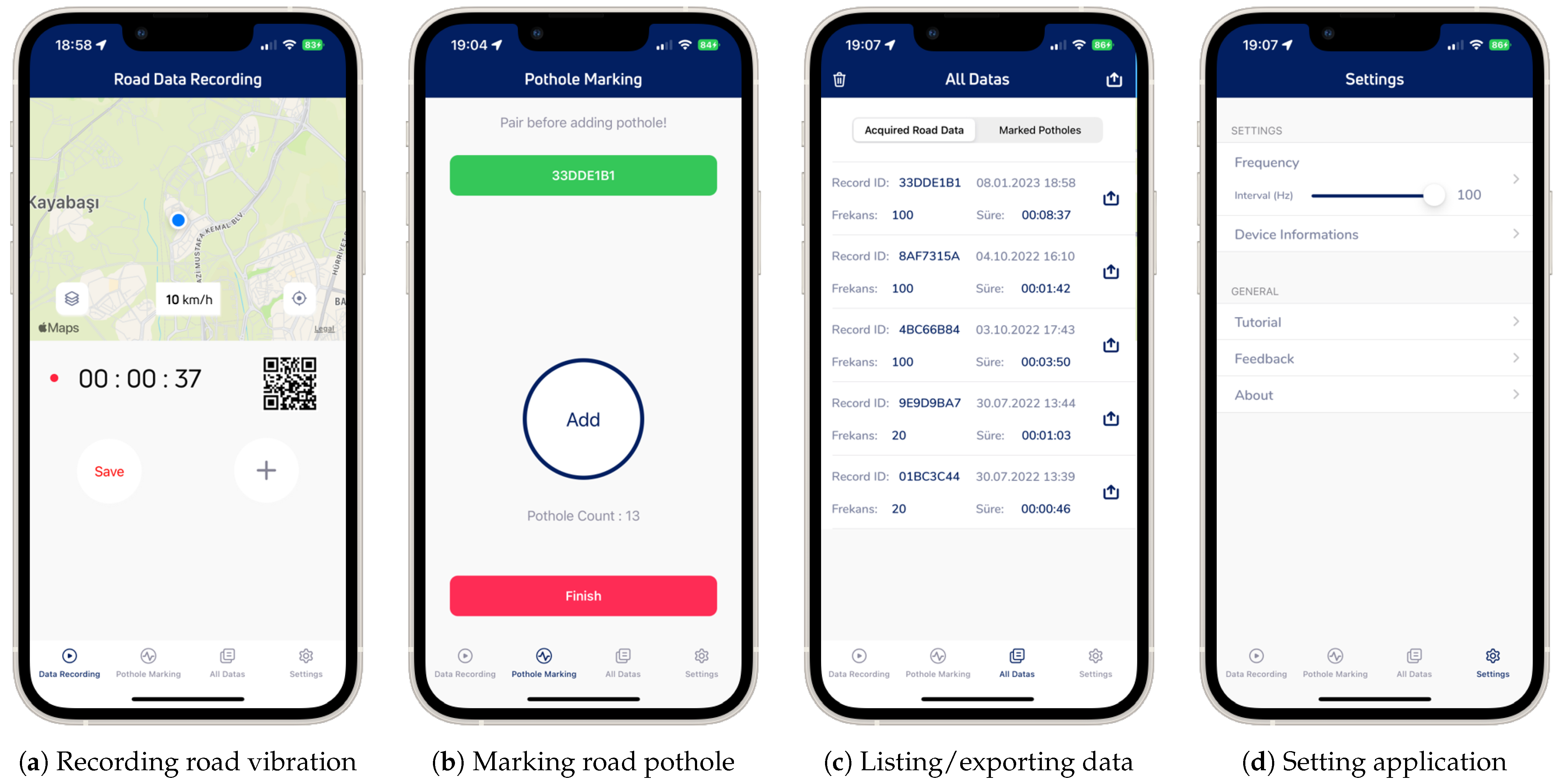
- Acquisition of road vibration data: Smartphone sensor data were recorded at the desired frequency, and the route was tracked on a map during recording, ensuring equal time intervals for data collection. This step was automated with the first mobile device fixed in the vehicle (Figure 4a).
- Marking road potholes: Initially, the smartphone recording the road vibration data was paired with a QR code. Then, while the vehicle was in motion and passed over road potholes, the driver’s assistant manually marked the potholes to indicate their locations. This step was performed using the second mobile device handheld by the driver’s assistant (Figure 4b).
- Viewing/listing/exporting recorded sensor and marked road pothole data: Data recorded on both devices were exported in CSV format (Figure 4c).
- Monitoring/specifying/modifying application features: The application included features such as adjusting data collection frequency, device information, etc. (Figure 4d).
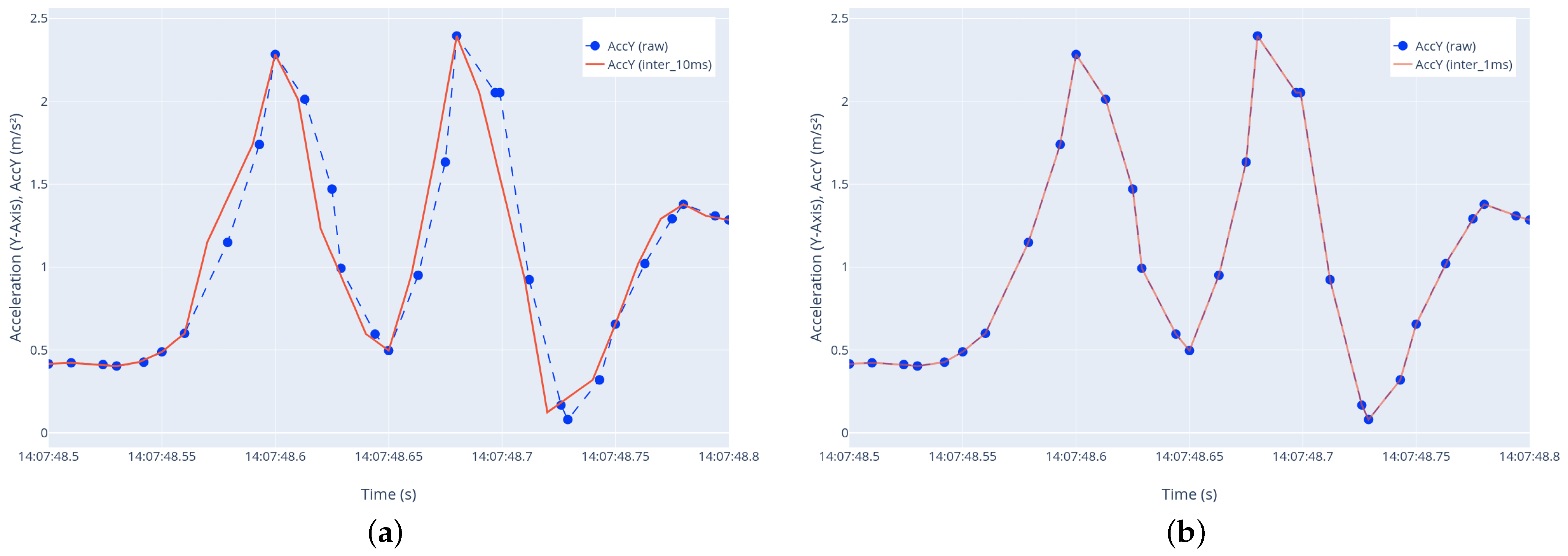
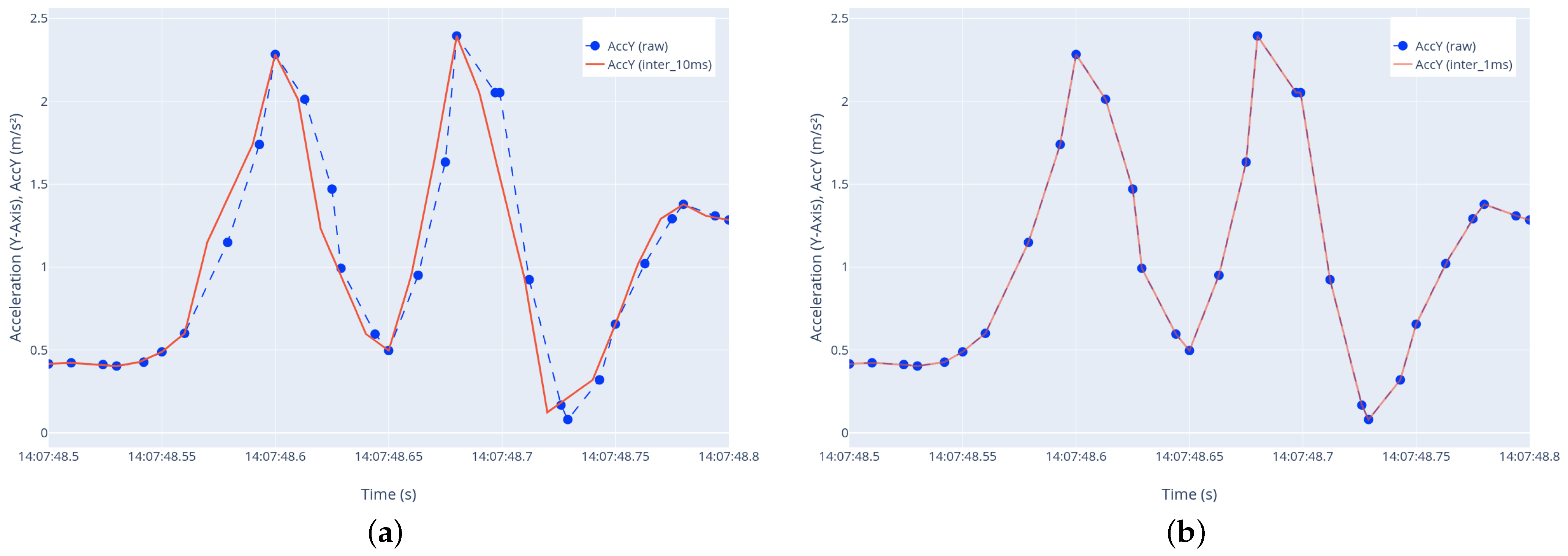
3.2. Data Acquisition and Preparing
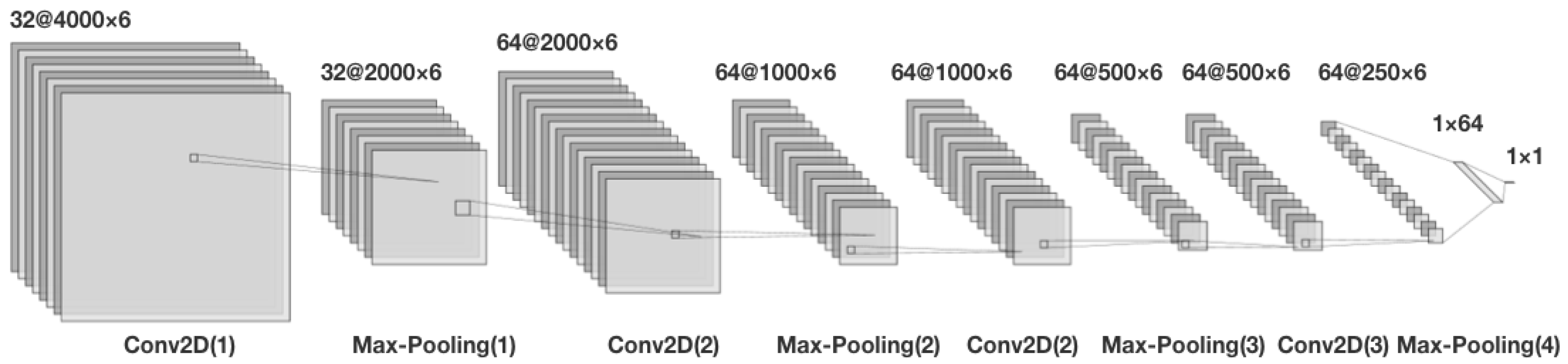
4. Training and Validating of Convolutional Neural Network Model
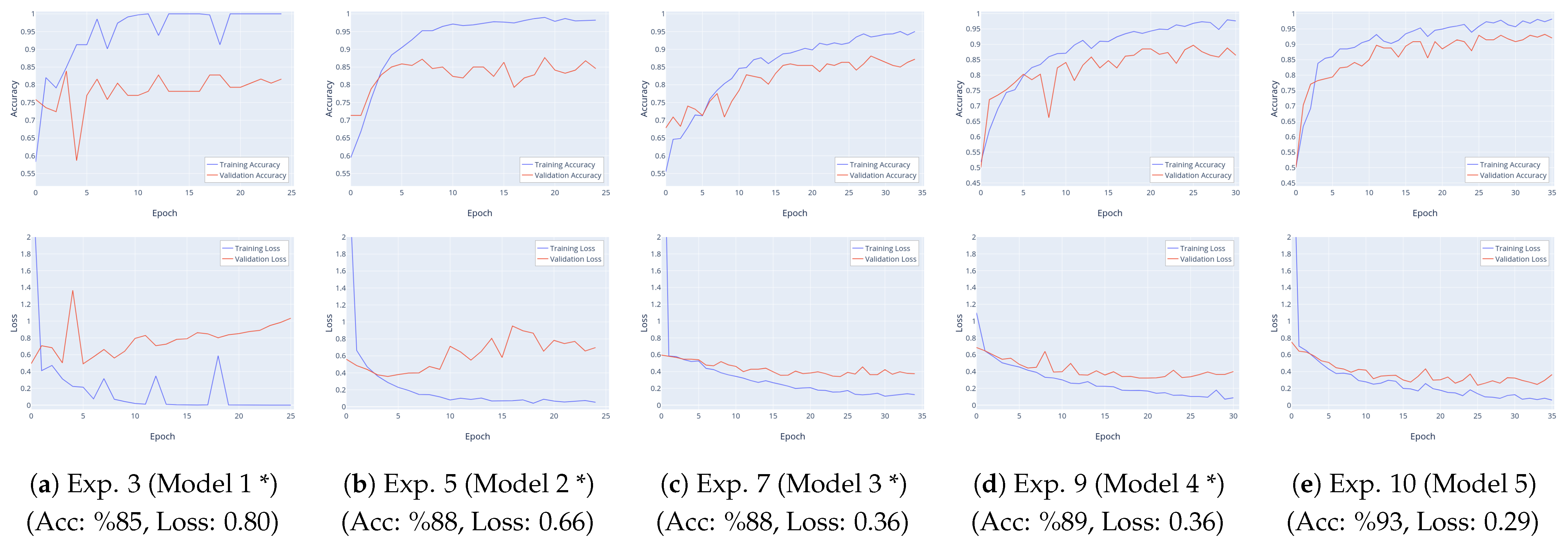
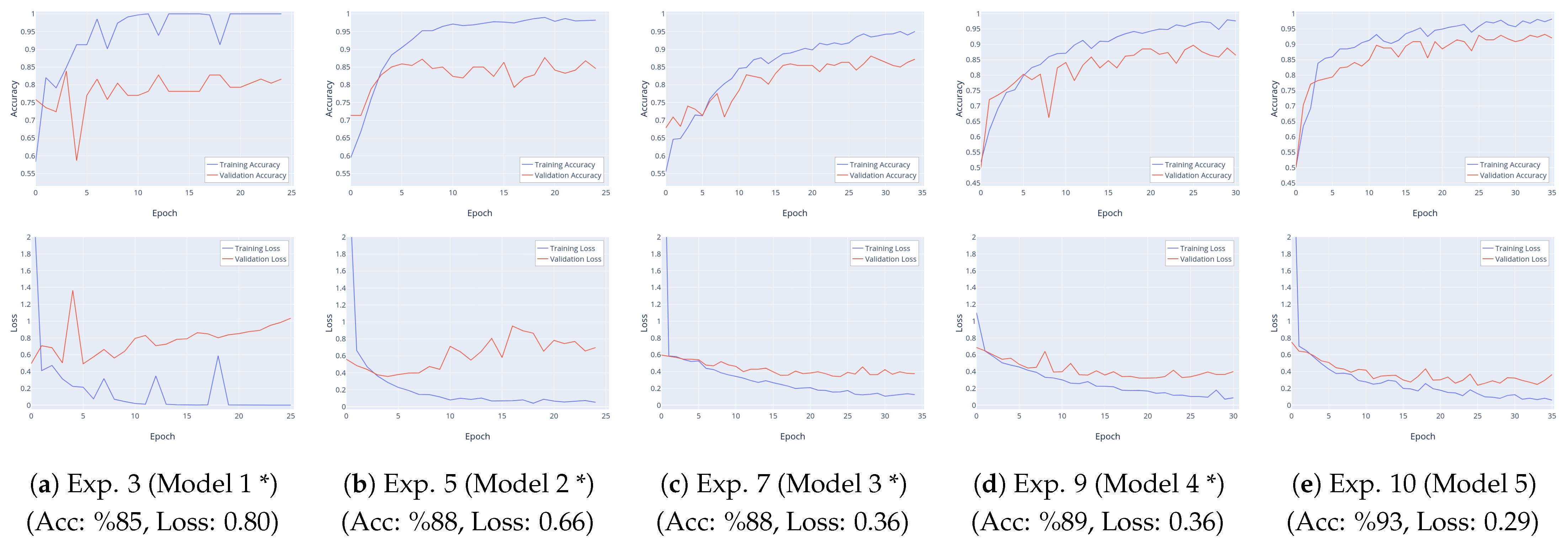
4.1. Model Training and Validating
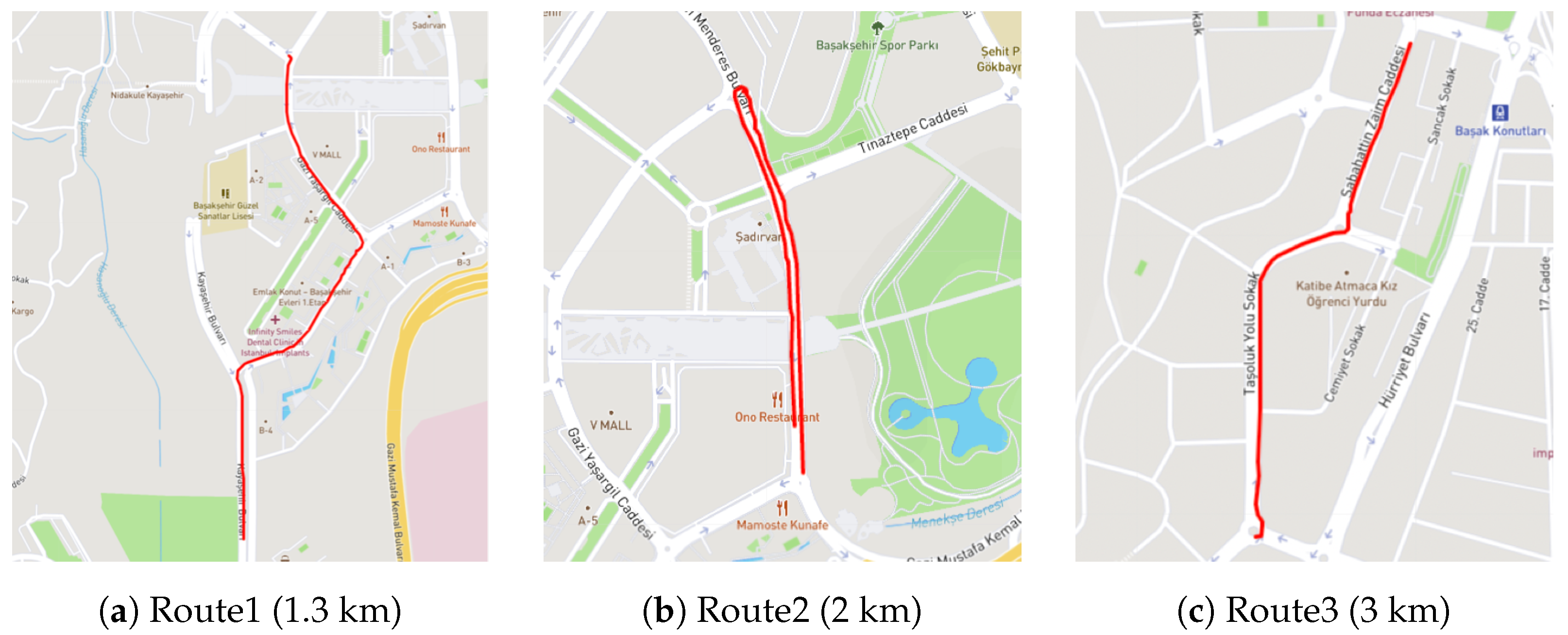
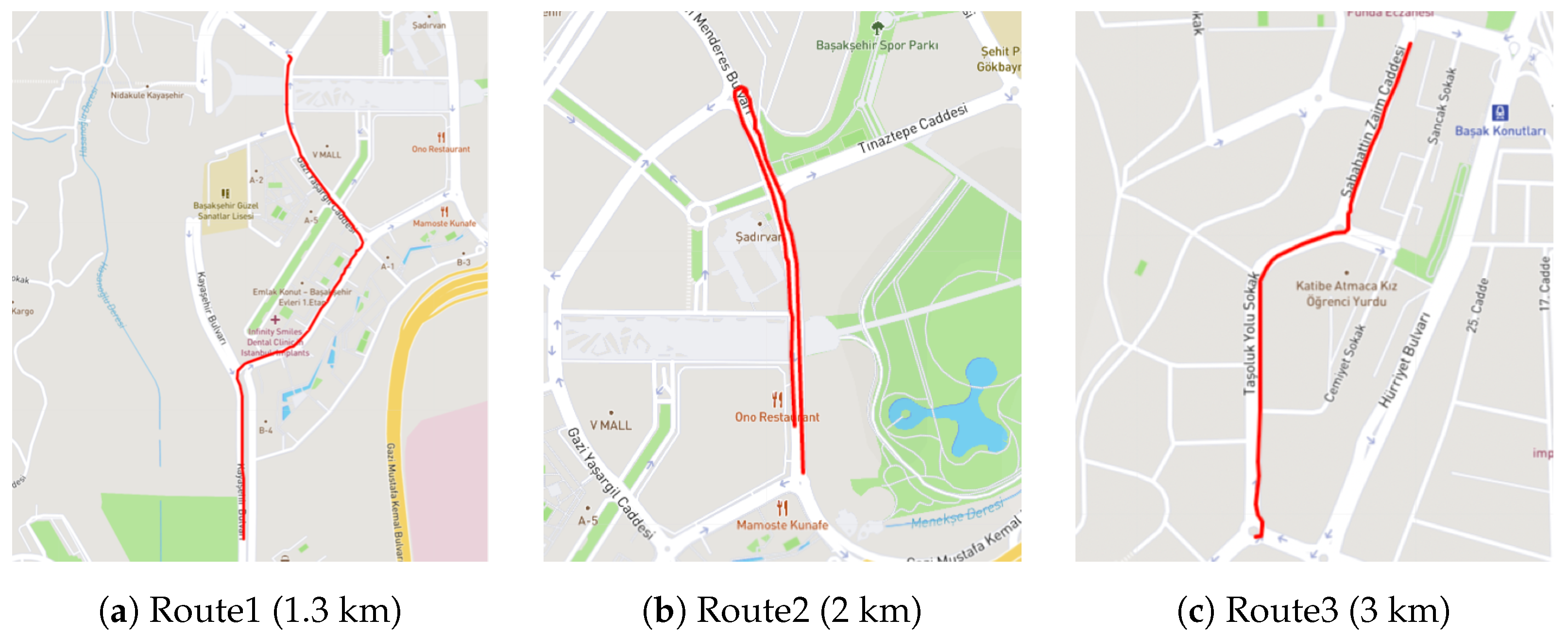
4.2. Model Testing
5. Results and Discussion
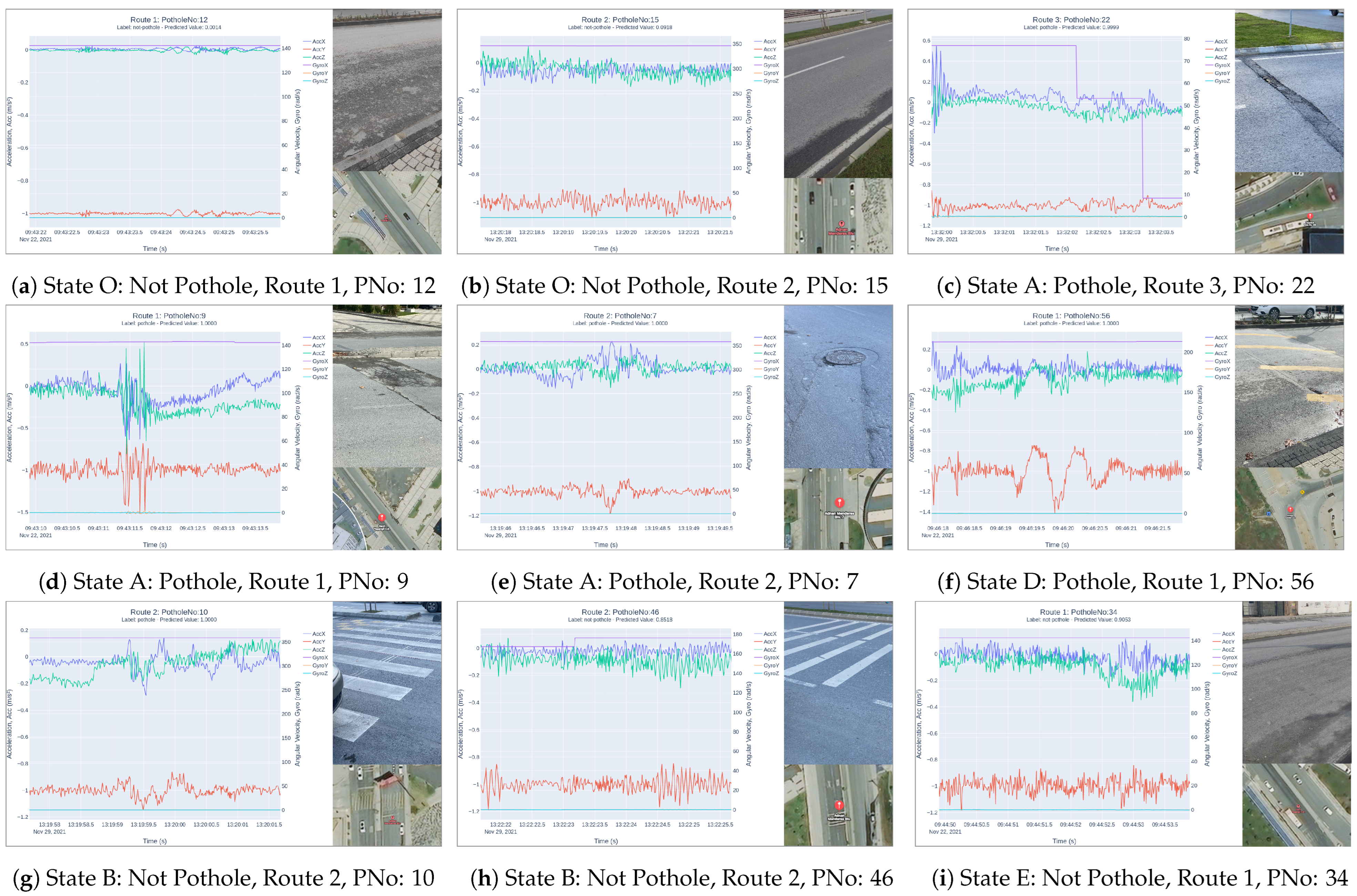
5.1. Predicted and Observed Results
- Situation O: Prediction value: , labeled as ‘Not Pothole’, and field observations confirmed the absence of potholes.
- Situation A (C): Prediction value: , labeled as ‘Pothole’, and field observations confirmed the presence of potholes.
- Situation A (C): Prediction value: , labeled as ‘Pothole’, and field observations confirmed the presence of manhole covers with a pothole appearance.
- Situation D: Prediction value: , labeled as ‘Pothole’, and field observations revealed speed bumps instead of potholes.
- Situation B: Prediction value: , labeled as ‘Not Pothole’, and field observations confirmed the presence of features such as pedestrian lane markings and road ridges, but no potholes.
- Situation E: Prediction value: , labeled as ‘Not Pothole’, and field observations confirmed the absence of any potholes.
5.2. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| A-GPS | Assisted Global Positioning System |
| GLONASS | Global Orbiting Navigation Satellite System |
| GNSS | Global Navigation Satellite Systems |
| CSV | Comma Separated Values |
| CONV | Convolutional |
| ReLU | Rectified Linear Unit |
| SGD | Stochastic gradient descent |
| RMSprob | Root mean square error probability |
| PCT | Percentage |
| ACC | Accuracy |
References
- TUIK Road Traffic Accident Statistics 2022. Available online: https://data.tuik.gov.tr/Bulten/Index?p=Karayolu-Trafik-Kaza-Istatistikleri-2022-49513 (accessed on 15 February 2023).
- KGM Traffic Accidents Summary 2022. Available online: https://www.kgm.gov.tr/SiteCollectionDocuments/KGMdocuments/Trafik/TrafikKazalariOzeti2022.pdf (accessed on 15 February 2023).
- Ma, N.; Fan, J.; Wang, W.; Wu, J.; Jiang, Y.; Xie, L.; Fan, R. Computer Vision for Road Imaging and Pothole Detection: A State-of-the-Art Review of Systems and Algorithms. Transp. Saf. Environ. 2022, 4, tdac026. [Google Scholar] [CrossRef]
- Sattar, S.; Li, S.; Chapman, M. Road Surface Monitoring Using Smartphone Sensors: A Review. Sensors 2018, 18, 3845. [Google Scholar] [CrossRef] [PubMed]
- Bursanescu, L.; Blais, F. Automated pavement distress data collection and analysis: A 3-D approach. In Proceedings of the International Conference on Recent Advances in 3-D Digital Imaging and Modeling (Cat. No.97TB100134), Ottawa, ON, Canada, 12–15 May 1997; pp. 311–317. [Google Scholar] [CrossRef]
- Wang, K.C.P.; Gong, W. Automated Pavement Distress Survey: A Review and A New Direction. In Proceedings of the Pavement Evaluation Conference, Roanoke, VA, USA, 21–25 October 2002; pp. 21–25. [Google Scholar]
- Moazzam, I.; Kamal, K.; Mathavan, S.; Usman, S.; Rahman, M. Metrology and visualization of potholes using the microsoft kinect sensor. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 1284–1291. [Google Scholar] [CrossRef]
- Lu, J.; Hudson, W.R.; Bertrand, C. Evaluation of Roughness System of Automatic Road Analyzer; Technical Report 1435; Transportation Research Board: Austin, TX, USA, 1994. [Google Scholar]
- ROMDAS System Road Survey Vehicle, Pavement Data Collection. Available online: https://romdas.com/romdas-system.html (accessed on 15 February 2023).
- Buza, E.; Omanovic, S.; Huseinovic, A. Pothole Detection with Image Processing and Spectral Clustering. In Proceedings of the 2nd International Conference on Information Technology and Computer Networks, Kunming, China, 21–23 September 2013; Volume 810, p. 4853. [Google Scholar]
- Koch, C.; Jog, G.M.; Brilakis, I. Automated Pothole Distress Assessment Using Asphalt Pavement Video Data. J. Comput. Civ. Eng. 2013, 27, 370–378. [Google Scholar] [CrossRef]
- Huidrom, L.; Das, L.K.; Sud, S. Method for Automated Assessment of Potholes, Cracks and Patches from Road Surface Video Clips. Proc.-Soc. Behav. Sci. 2013, 104, 312–321. [Google Scholar] [CrossRef]
- Zhang, C.; Elaksher, A. An Unmanned Aerial Vehicle-Based Imaging System for 3D Measurement of Unpaved Road Surface Distresses UAV-based imaging system for road distress measurements. Comput.-Aided Civ. Infrastruct. Eng. 2012, 27, 118–129. [Google Scholar] [CrossRef]
- Ravi, R.; Bullock, D.; Habib, A. Highway And Airport Runway Pavement Inspection Using Mobile Lidar. Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2020, XLIII-B1-2020, 349–354. [Google Scholar] [CrossRef]
- Fan, R.; Ozgunalp, U.; Hosking, B.; Liu, M.; Pitas, I. Pothole Detection Based on Disparity Transformation and Road Surface Modeling. IEEE Trans. Image Process. 2020, 29, 897–908. [Google Scholar] [CrossRef]
- Lin, J.; Liu, Y. Potholes Detection Based on SVM in the Pavement Distress Image. In Proceedings of the 2010 Ninth International Symposium on Distributed Computing and Applications to Business, Engineering and Science, Hong Kong, China, 10–12 August 2010; pp. 544–547. [Google Scholar] [CrossRef]
- Fan, R.; Bocus, M.J.; Zhu, Y.; Jiao, J.; Wang, L.; Ma, F.; Cheng, S.; Liu, M. Road Crack Detection Using Deep Convolutional Neural Network and Adaptive Thresholding. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium, Paris, France, 9–12 June 2019; pp. 474–479. [Google Scholar]
- Pereira, V.; Tamura, S.; Hayamizu, S.; Fukai, H. A Deep Learning-Based Approach for Road Pothole Detection in Timor Leste. In Proceedings of the 2018 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Singapore, 31 July–2 August 2018; pp. 279–284. [Google Scholar] [CrossRef]
- Mohan, P.; Padmanabhan, V.N.; Ramjee, R. Nericell: Rich monitoring of road and traffic conditions using mobile smartphones. In Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems—SenSys’08, Raleigh, NC, USA, 5–7 November 2008; p. 323. [Google Scholar] [CrossRef]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using Android smartphones with accelerometers. In Proceedings of the 2011 International Conference on Distributed Computing in Sensor Systems and Workshops (DCOSS), Barcelona, Spain, 27–29 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Bhoraskar, R.; Vankadhara, N.; Raman, B.; Kulkarni, P. Wolverine: Traffic and road condition estimation using smartphone sensors. In Proceedings of the 2012 Fourth International Conference on Communication Systems and Networks (COMSNETS 2012), Bangalore, India, 3–7 January 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Silva, N.; Soares, J.; Shah, V.; Santos, M.Y.; Rodrigues, H. Anomaly Detection in Roads with a Data Mining Approach. Procedia Comput. Sci. 2017, 121, 415–422. [Google Scholar] [CrossRef]
- Perttunen, M.; Mazhelis, O.; Cong, F.; Kauppila, M.; Leppänen, T.; Kantola, J.; Collin, J.; Pirttikangas, S.; Haverinen, J.; Ristaniemi, T. Distributed road surface condition monitoring using mobile phones. In Proceedings of the Ubiquitous Intelligence and Computing; Springer: Berlin/Heidelberg, Germany, 2011; pp. 64–78. [Google Scholar] [CrossRef]
- Singh, G.; Bansal, D.; Sofat, S.; Aggarwal, N. Smart patrolling: An efficient road surface monitoring using smartphone sensors and crowdsourcing. Pervasive Mob. Comput. 2017, 40, 71–88. [Google Scholar] [CrossRef]
- Eriksson, J.; Girod, L.; Hull, B.; Newton, R.; Madden, S.; Balakrishnan, H. The pothole patrol: Using a mobile sensor network for road surface monitoring. In Proceedings of the 6th International Conference on Mobile Systems, Applications, and Services—MobiSys’08, Breckenridge, CO, USA, 17–20 June 2008; p. 29. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, X.; Cervone, G.; Yang, L. Detection of Asphalt Pavement Potholes and Cracks Based on the Unmanned Aerial Vehicle Multispectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3701–3712. [Google Scholar] [CrossRef]
- Wu, S.; Hadachi, A. Road Surface Recognition Based on DeepSense Neural Network using Accelerometer Data. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 305–312. [Google Scholar] [CrossRef]
- Yao, S.; Hu, S.; Zhao, Y.; Zhang, A.; Abdelzaher, T. DeepSense: A Unified Deep Learning Framework for Time-Series Mobile Sensing Data Processing. In Proceedings of the 26th International Conference on World Wide Web, Perth, Australia, 3–7 May 2017; pp. 351–360. [Google Scholar] [CrossRef]
- Harikrishnan, P.M.; Gopi, V.P. Vehicle Vibration Signal Processing for Road Surface Monitoring. IEEE Sens. J. 2017, 17, 5192–5197. [Google Scholar] [CrossRef]
- Douangphachanh, V.; Oneyama, H. Exploring the Use of Smartphone Accelerometer and Gyroscope to Study on the Estimation of Road Surface Roughness Condition. In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics, Vienna, Austria, 1–3 September 2014; pp. 783–787. [Google Scholar] [CrossRef]
- Zang, K.; Shen, J.; Huang, H.; Wan, M.; Shi, J. Assessing and Mapping of Road Surface Roughness based on GPS and Accelerometer Sensors on Bicycle-Mounted Smartphones. Sensors 2018, 18, 914. [Google Scholar] [CrossRef] [PubMed]
- Sabir, N.; Memon, A.A.; Shaikh, F.K. Threshold Based Efficient Road Monitoring System Using Crowdsourcing Approach. Wirel. Pers. Commun. 2019, 106, 2407–2425. [Google Scholar] [CrossRef]
- Kalushkov, T.; Shipkovenski, G.; Petkov, E.; Radoeva, R. Accelerometer Sensor Network For Reliable Pothole Detection. In Proceedings of the 2021 5th International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 21–23 October 2021; pp. 57–61. [Google Scholar] [CrossRef]
- Sattar, S.; Li, S.; Chapman, M. Developing a near real-time road surface anomaly detection approach for road surface monitoring. Measurement 2021, 185, 109990. [Google Scholar] [CrossRef]
- Seraj, F.; van der Zwaag, B.J.; Dilo, A.; Luarasi, T.; Havinga, P. RoADS: A Road Pavement Monitoring System for Anomaly Detection Using Smart Phones. In Proceedings of the Big Data Analytics in the Social and Ubiquitous Context; Atzmueller, M., Chin, A., Janssen, F., Schweizer, I., Trattner, C., Eds.; Springer International Publishing: Cham, Switzerland, 2016; Volume 9546, pp. 128–146. [Google Scholar] [CrossRef]
- Allouch, A.; Koubaa, A.; Abbes, T.; Ammar, A. RoadSense: Smartphone Application to Estimate Road Conditions Using Accelerometer and Gyroscope. IEEE Sens. J. 2017, 17, 4231–4238. [Google Scholar] [CrossRef]
- Vimalkumar, K.; Vinodhini, R.E.; Archanaa, R. An Early Detection-Warning System to Identify Speed Breakers and Bumpy Roads using Sensors In Smartphones. Int. J. Electr. Comput. Eng. (IJECE) 2017, 7, 1377. [Google Scholar] [CrossRef]
- Cabral, F.S.; Pinto, M.; Mouzinho, F.A.L.N.; Fukai, H.; Tamura, S. An Automatic Survey System for Paved and Unpaved Road Classification and Road Anomaly Detection using Smartphone Sensor. In Proceedings of the 2018 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Singapore, 31 July–2 August 2018; pp. 65–70. [Google Scholar] [CrossRef]
- Singal, G.; Goswami, A.; Gupta, S.; Choudhary, T. Pitfree: Pot-holes detection on Indian Roads using Mobile Sensors. In Proceedings of the 2018 IEEE 8th International Advance Computing Conference (IACC), Greater Noida, India, 14–15 December 2018; pp. 185–190. [Google Scholar] [CrossRef]
- Du, R.; Qiu, G.; Gao, K.; Hu, L.; Liu, L. Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor. Sensors 2020, 20, 451. [Google Scholar] [CrossRef]
- Wu, C.; Wang, Z.; Hu, S.; Lepine, J.; Na, X.; Ainalis, D.; Stettler, M. An Automated Machine-Learning Approach for Road Pothole Detection Using Smartphone Sensor Data. Sensors 2020, 20, 5564. [Google Scholar] [CrossRef]
- Bansal, K.; Mittal, K.; Ahuja, G.; Singh, A.; Gill, S.S. DeepBus: Machine learning based real time pothole detection system for smart transportation using IoT. Internet Technol. Lett. 2020, 3, e156. [Google Scholar] [CrossRef]
- Bhamare, L.; Mitra, N.; Varade, G.; Mehta, H. Study Of Types of Road Abnormalities and Techniques Used for Their Detection. In Proceedings of the 2021 7th International Conference on Electrical, Electronics and Information Engineering (ICEEIE), Malang, Indonesia, 2 October 2021; pp. 472–477. [Google Scholar] [CrossRef]
- Bose, B.; Dutta, J.; Ghosh, S.; Pramanick, P.; Roy, S. D&RSense: Detection of Driving Patterns and Road Anomalies. In Proceedings of the 2018 3rd International Conference On Internet of Things: Smart Innovation and Usages (IoT-SIU), Bhimtal, India, 23–24 February 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Zhao, X.; Wu, X.; Sun, Y.E.; Huang, H.; Du, Y.; Cao, Z. CPDM: An Efficient Crowdsensing-Based Pothole Detection and Measurement System Design. In Proceedings of the 2019 IEEE 31st International Conference on Tools with Artificial Intelligence (ICTAI), Portland, OR, USA, 4–6 November 2019; pp. 547–554. [Google Scholar] [CrossRef]
- Ata, M.M.; Francies, M.L.; Mohamed, M.A. A robust optimized convolutional neural network model for human activity recognition using sensing devices. Concurr. Comput. Pract. Exp. 2022, 34, e6964. [Google Scholar] [CrossRef]
- Jordao, A.; Torres, L.A.B.; Schwartz, W.R. Novel approaches to human activity recognition based on accelerometer data. Signal Image Video Process. 2018, 12, 1387–1394. [Google Scholar] [CrossRef]
- Alemayoh, T.T.; Hoon Lee, J.; Okamoto, S. Deep Learning Based Real-time Daily Human Activity Recognition and Its Implementation in a Smartphone. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 24–27 June 2019; pp. 179–182. [Google Scholar] [CrossRef]
- Gholamrezaii, M.; AlModarresi, S. A time-efficient convolutional neural network model in human activity recognition. Multimed. Tools Appl. 2021, 80, 19361–19376. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, L.; Gao, W.; Min, F.; He, J. Shallow Convolutional Neural Networks for Human Activity Recognition Using Wearable Sensors. IEEE Trans. Instrum. Meas. 2021, 70, 2510811. [Google Scholar] [CrossRef]
- Shi, W.; Fang, X.; Yang, G.; Huang, J. Human Activity Recognition Based on Multichannel Convolutional Neural Network With Data Augmentation. IEEE Access 2022, 10, 76596–76606. [Google Scholar] [CrossRef]
- Jaberi, M.; Ravanmehr, R. Human activity recognition via wearable devices using enhanced ternary weight convolutional neural network. Pervasive Mob. Comput. 2022, 83, 101620. [Google Scholar] [CrossRef]
- Perez-Gamboa, S.; Sun, Q.; Zhang, Y. Improved Sensor Based Human Activity Recognition via Hybrid Convolutional and Recurrent Neural Networks. In Proceedings of the 2021 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kailua-Kona, HI, USA, 22–25 March 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Prasad, A.; Tyagi, A.K.; Althobaiti, M.M.; Almulihi, A.; Mansour, R.F.; Mahmoud, A.M. Human Activity Recognition Using Cell Phone-Based Accelerometer and Convolutional Neural Network. Appl. Sci. 2021, 11, 12099. [Google Scholar] [CrossRef]
- Realm Swift SDK. Available online: https://www.mongodb.com/docs/realm/sdk/swift/ (accessed on 15 February 2023).
- Carneiro, T.; Medeiros Da Nobrega, R.V.; Nepomuceno, T.; Bian, G.B.; De Albuquerque, V.H.C.; Filho, P.P.R. Performance Analysis of Google Colaboratory as a Tool for Accelerating Deep Learning Applications. IEEE Access 2018, 6, 61677–61685. [Google Scholar] [CrossRef]
- Hayes, B. Usage of Programming Languages by Data Scientists: Python Grows while R Weakens. Available online: https://businessoverbroadway.com/2020/06/29/usage-of-programming-languages-by-data-scientists-python-grows-while-r-weakens/ (accessed on 15 February 2023).
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the 2017 International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Name | Layer Types | Number of Layers |
|---|---|---|
| Model 1 | Conv(16,(2,2)) – ReLU Conv(32,(2,2)) – ReLU Flatten - Dense(64) – ReLU – Dense(1) – Sigmoid | 5 |
| Model 2 | Conv(16,(2,2)) – ReLU – Dropout(0.1) Conv(32,(2,2)) – ReLU – Dropout(0.1) Flatten– Dense(64) – ReLU – Dropout(0.5) – Dense(1) – Sigmoid | 5 |
| Model 3 | Conv(16,(2,2)) – ReLU – l2(0.0001) – Dropout(0.3) Conv(32,(2,2)) – ReLU – l2(0.0001) – Dropout(0.3) Conv(32,(2,2)) – ReLU – l2(0.0001) – Dropout(0.3) Flatten – Dense(64) – ReLU – Dropout(0.5) – Dense(1) – Sigmoid | 6 |
| Model 4 | Conv(32,(3,3)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Conv(64,(3,3)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Conv(64,(3,3)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Conv(64,(3,3)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Flatten – Dense(64) – ReLU – Dropout(0.5) – Dense(1) – Sigmoid | 11 |
| Model 5 | Conv(32,(5,5)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Conv(64,(5,5)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Conv(64,(5,5)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Conv(64,(5,5)) – ReLU – l2(0.0001) – MaxPooling – Dropout(0.3) Flatten – Dense(64) – ReLU – Dropout(0.5) – Dense(1) – Sigmoid | 11 |
| Model Name | Parameter Count |
|---|---|
| Model 1 | 32,753,905 |
| Model 2 | 32,753,905 |
| Model 3 | 24,563,985 |
| Model 4 | 6,236,801 |
| Model 5 | 6,401,153 |
| Experiment Number | Model Name | Data Count | Data Split | Batch Size | Optimization Function | Learning Rate | Epock Count |
|---|---|---|---|---|---|---|---|
| 1 | Model 1 | 432 | 80/20 | 32 | Adam | 0.001 | 28 |
| 2 | Model 1 | 432 | 80/20 | 32 | SGD | 0.001 | 30 |
| 3 | Model 1 | 432 | 80/20 | 32 | RMSprop | 0.001 | 24 |
| 4 | Model 2 | 432 | 80/20 | 32 | RMSprop | 0.01 | 27 |
| 5 | Model 2 | 1132 | 80/20 | 16 | RMSprop | 0.001 | 25 |
| 6 | Model 3 | 1132 | 80/20 | 32 | RMSprop | 0.001 | 25 |
| 7 | Model 3 | 1132 | 80/20 | 64 | RMSprop | 0.001 | 35 |
| 8 | Model 4 | 1132 | 70/30 | 64 | RMSprop | 0.0005 | 31 |
| 9 | Model 4 | 1132 | 70/30 | 64 | Adam | 0.0005 | 35 |
| 10 | Model 5 | 1132 | 70/30 | 128 | RMSprop | 0.001 | 36 |
| Exp. Number | Model Name | Training | Validation | ||
|---|---|---|---|---|---|
| Accuracy (%) | Loss | Accuracy (%) | Loss | ||
| 1 | Model 1 | 98.93 | 0.0589 | 86.21 | 0.4333 |
| 2 | Model 1 | 94.92 | 0.1981 | 81.66 | 0.4707 |
| 3 | Model 1 * | 100.00 | 0.0138 | 85.06 | 0.8016 |
| 4 | Model 2 | 94.17 | 0.1513 | 89.66 | 0.5036 |
| 5 | Model 2 * | 98.94 | 0.0710 | 87.67 | 0.6554 |
| 6 | Model 3 | 92.00 | 0.1569 | 87.22 | 0.3349 |
| 7 | Model 3 * | 93.90 | 0.1282 | 88.11 | 0.3639 |
| 8 | Model 4 | 96.85 | 0.1029 | 90.00 | 0.3614 |
| 9 | Model 4 * | 97.24 | 0.1183 | 89.12 | 0.3575 |
| 10 | Model 5 * | 97.08 | 0.0924 | 93.24 | 0.2948 |
| Route Name | Predicted by Model | Field-Observed | Prediction Acc. | ||||
|---|---|---|---|---|---|---|---|
| Pothole | Not Pothole | Pothole | Bump | Conflict | Ratio | Pct (%) | |
| (0.95 ≤ pv ≤ 1) | (0.5 ≤ pv < 0.95) | ||||||
| State | A | B | C | D | E | (C+D)/A | |
| Route1 | 29 | 9 | 22 | 3 | 4 | 25/29 | 86.2 |
| Route2 | 24 | 3 | 15 | 6 | 1 | 21/24 | 87.5 |
| Route3 | 15 | 4 | 8 | 4 | 2 | 12/15 | 80.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozoglu, F.; Gökgöz, T. Detection of Road Potholes by Applying Convolutional Neural Network Method Based on Road Vibration Data. Sensors 2023, 23, 9023. https://doi.org/10.3390/s23229023
Ozoglu F, Gökgöz T. Detection of Road Potholes by Applying Convolutional Neural Network Method Based on Road Vibration Data. Sensors. 2023; 23(22):9023. https://doi.org/10.3390/s23229023
Chicago/Turabian StyleOzoglu, Furkan, and Türkay Gökgöz. 2023. "Detection of Road Potholes by Applying Convolutional Neural Network Method Based on Road Vibration Data" Sensors 23, no. 22: 9023. https://doi.org/10.3390/s23229023
APA StyleOzoglu, F., & Gökgöz, T. (2023). Detection of Road Potholes by Applying Convolutional Neural Network Method Based on Road Vibration Data. Sensors, 23(22), 9023. https://doi.org/10.3390/s23229023