
Overcoming Periodic Stripe Noise in Infrared Linear Array Images: The Fourier-Assisted Correlative Denoising Method

Abstract
:1. Introduction
2. Proposed Methods
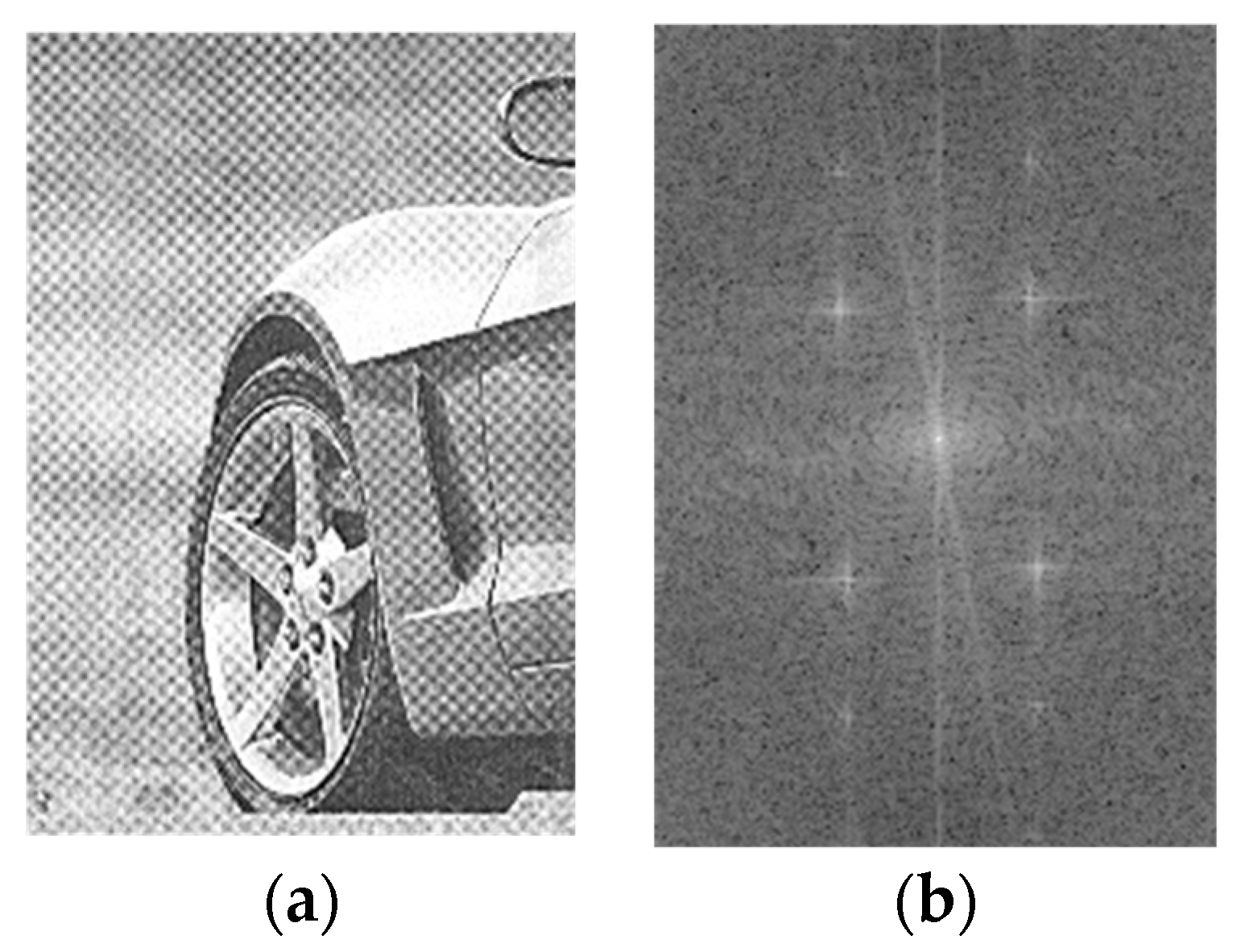
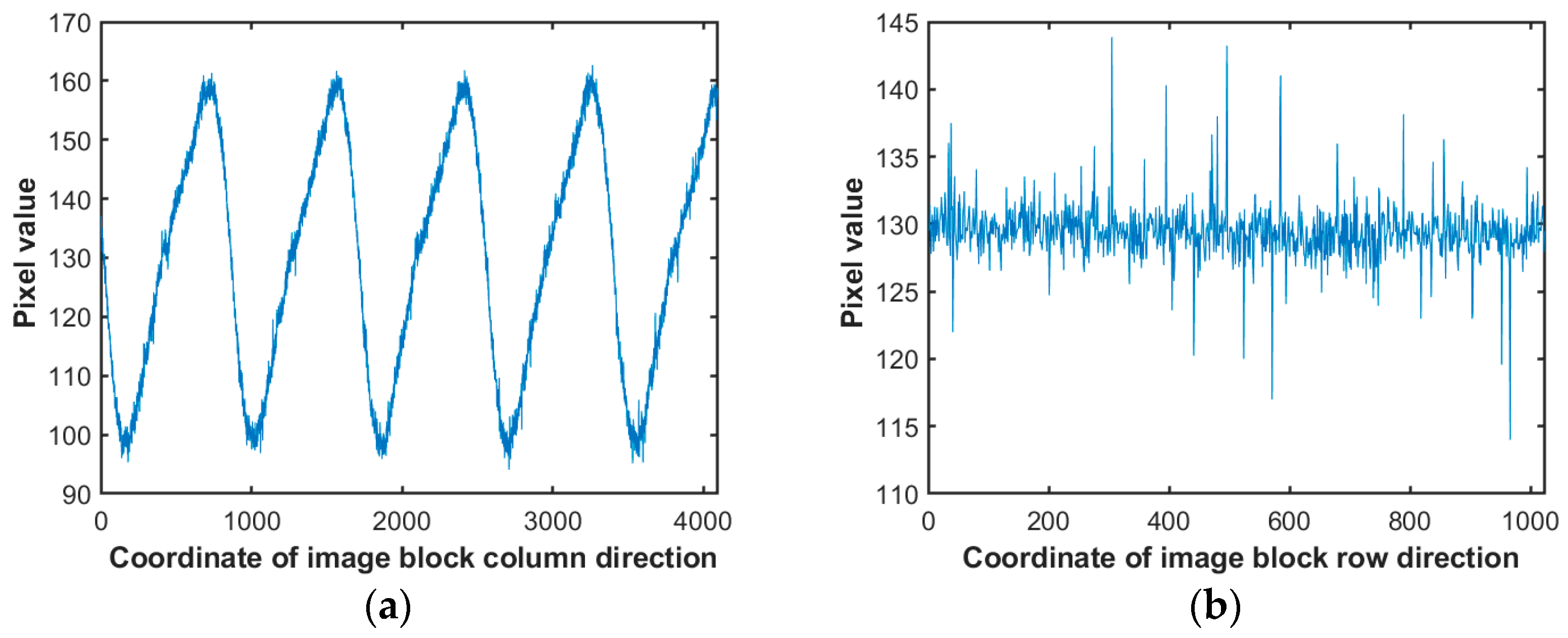
2.1. Characteristics of the Periodic Noise
2.2. Noise Period Calculation Based on Fourier Transform
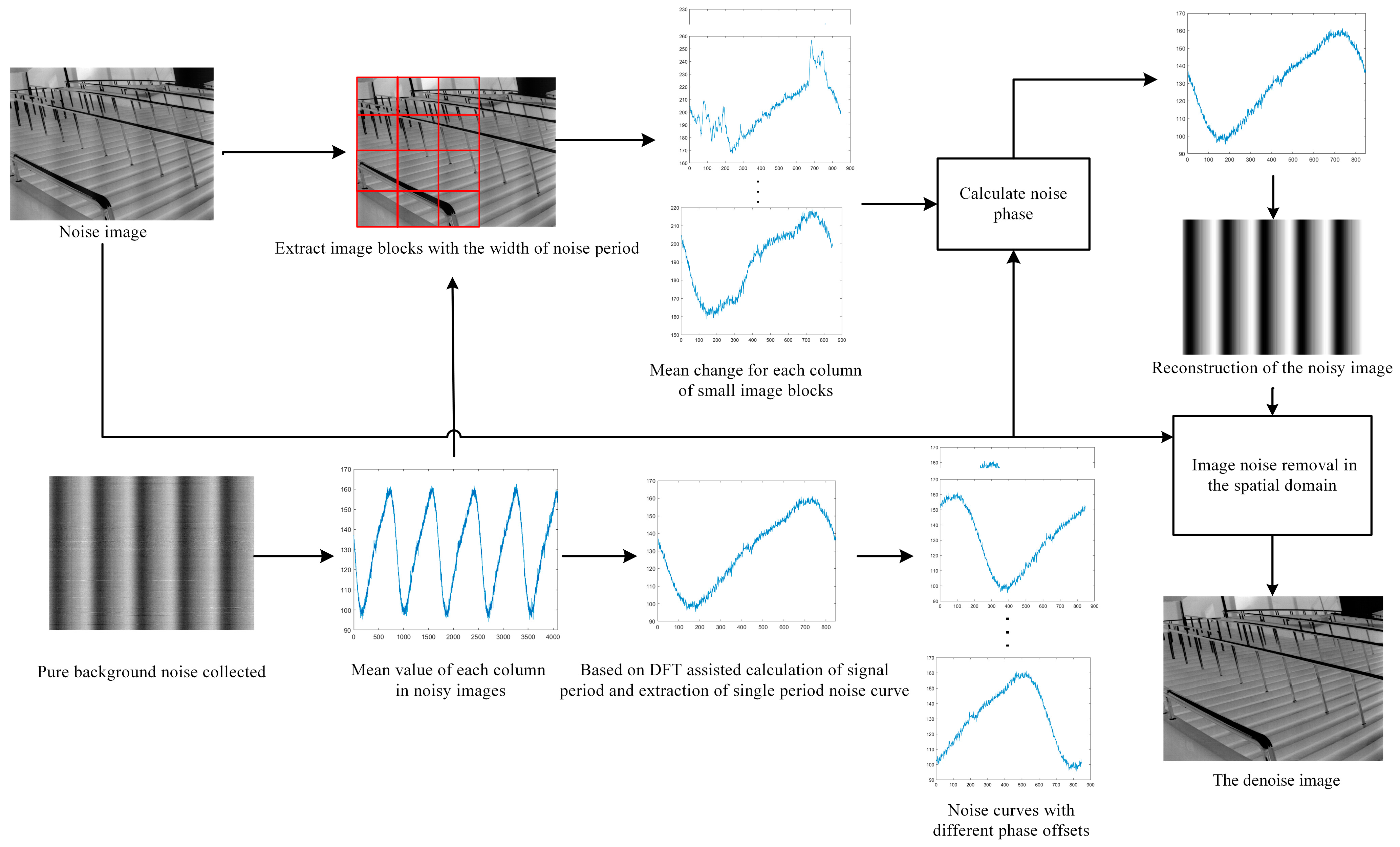
2.3. Fourier-Assisted Correlative Denoising (FACD) Mechanism
- denotes the row count of the image ;
- stands for the count of segmentation blocks in the row direction and ;
- stands for the count of segmentation blocks in the column direction; , where the function rounds a number down to its nearest integer, signifies the column count of the image.
2.4. Overall Algorithmic Procedure
- Step 1: Single-Cycle Noise Sequence Extraction
- During the non-uniformity correction process of the infrared camera, collect the cyclical noise image under a pure background;
- Implementing the Fourier Transform-centric periodic solution algorithm, as introduced in Section 2.2, to identify the noise period for the observed noise signal;
- Employing Formula (13) and the ascertained noise period , derive the single-cycle noise sequence .
- Step 2: Image Data Partition and Processing
- Step 3: Cross-Correlation Function and Offset Determination
- Step 4: Sequence Ordering and Offset Refinement
- Step 5: Image Denoising
3. Experimental Results and Analysis
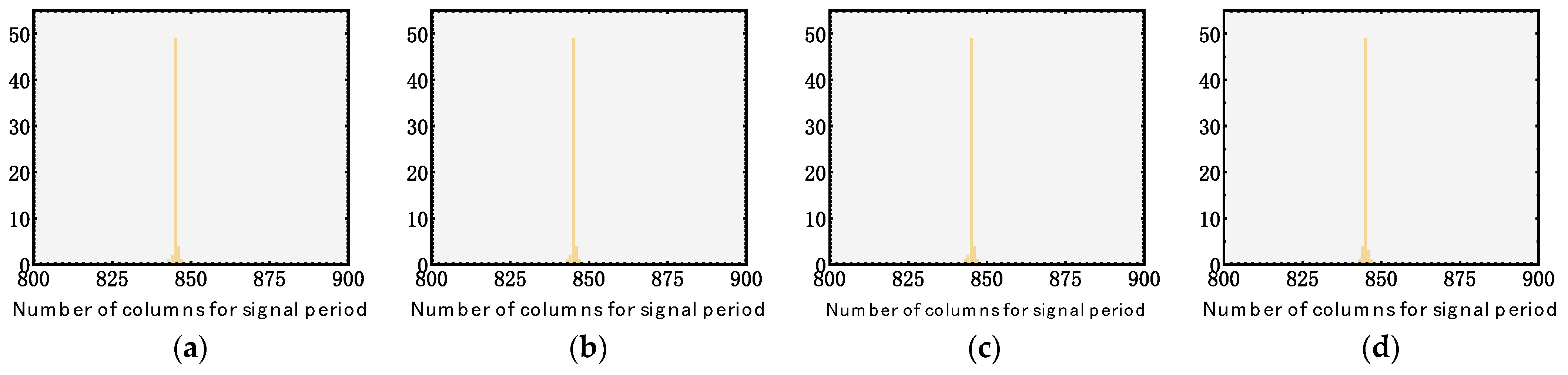
3.1. Investigation into the Consistency of Periodic Noise in Infrared Linear Array Detectors
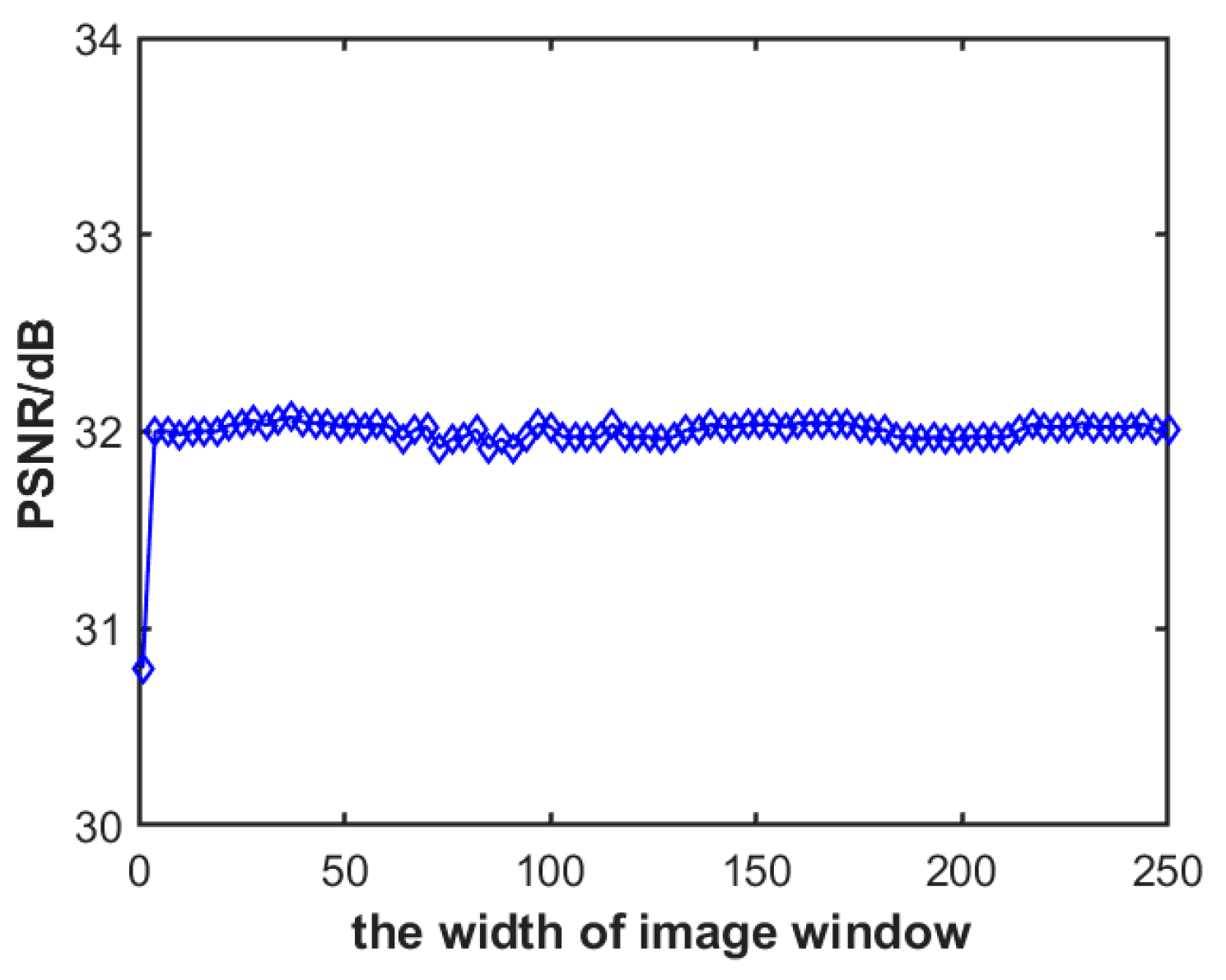
3.2. Impact of Image Block Width
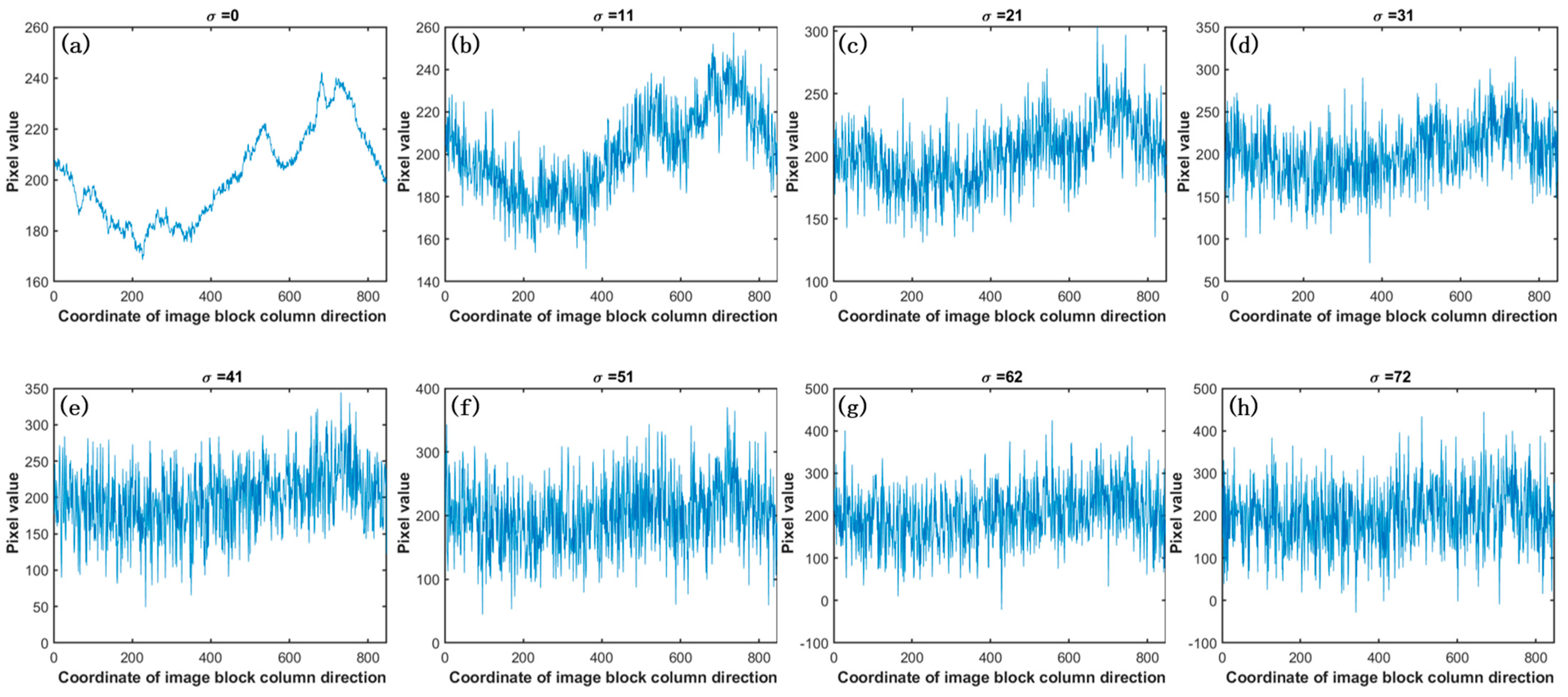
3.3. Robustness Experiment
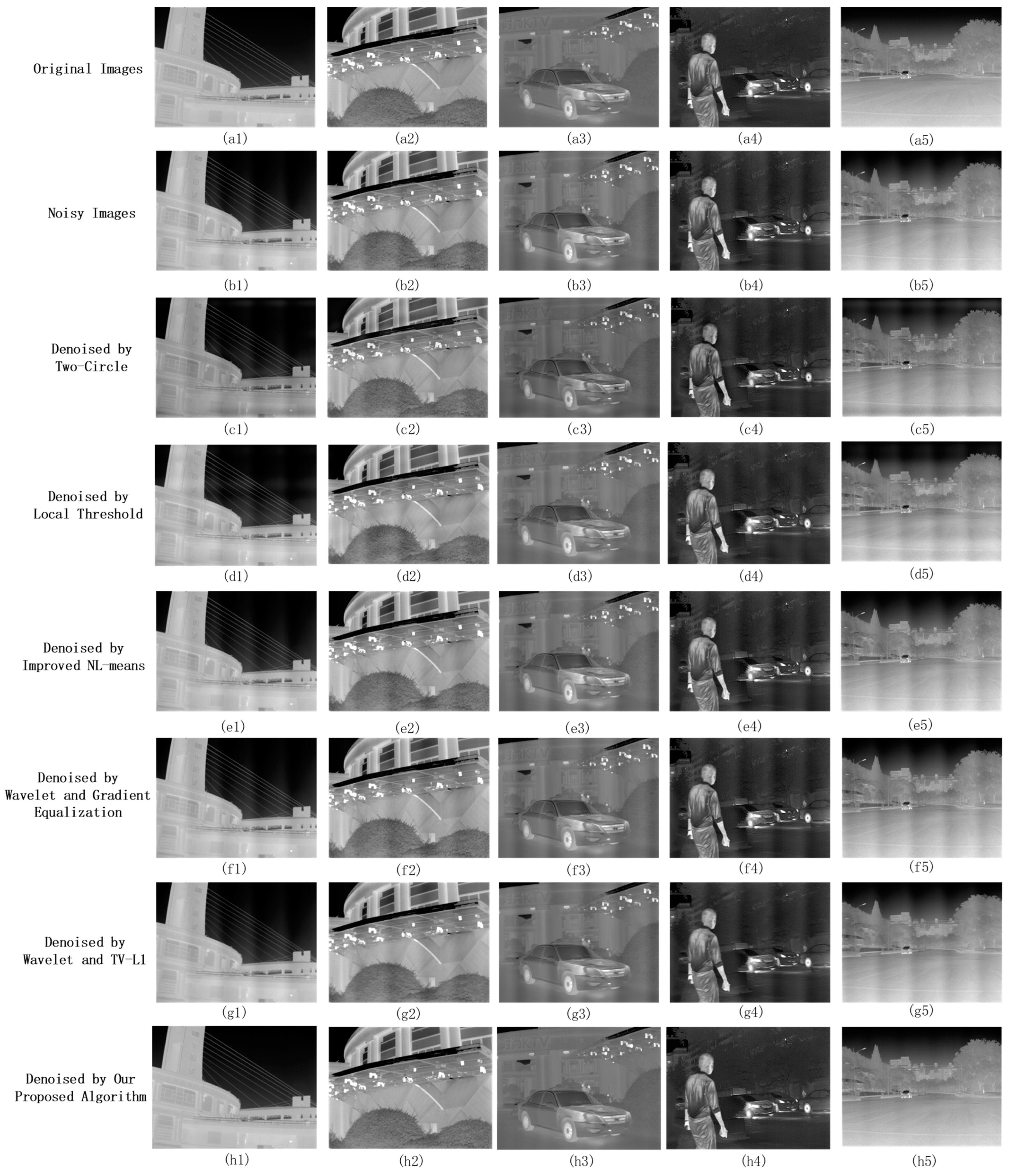
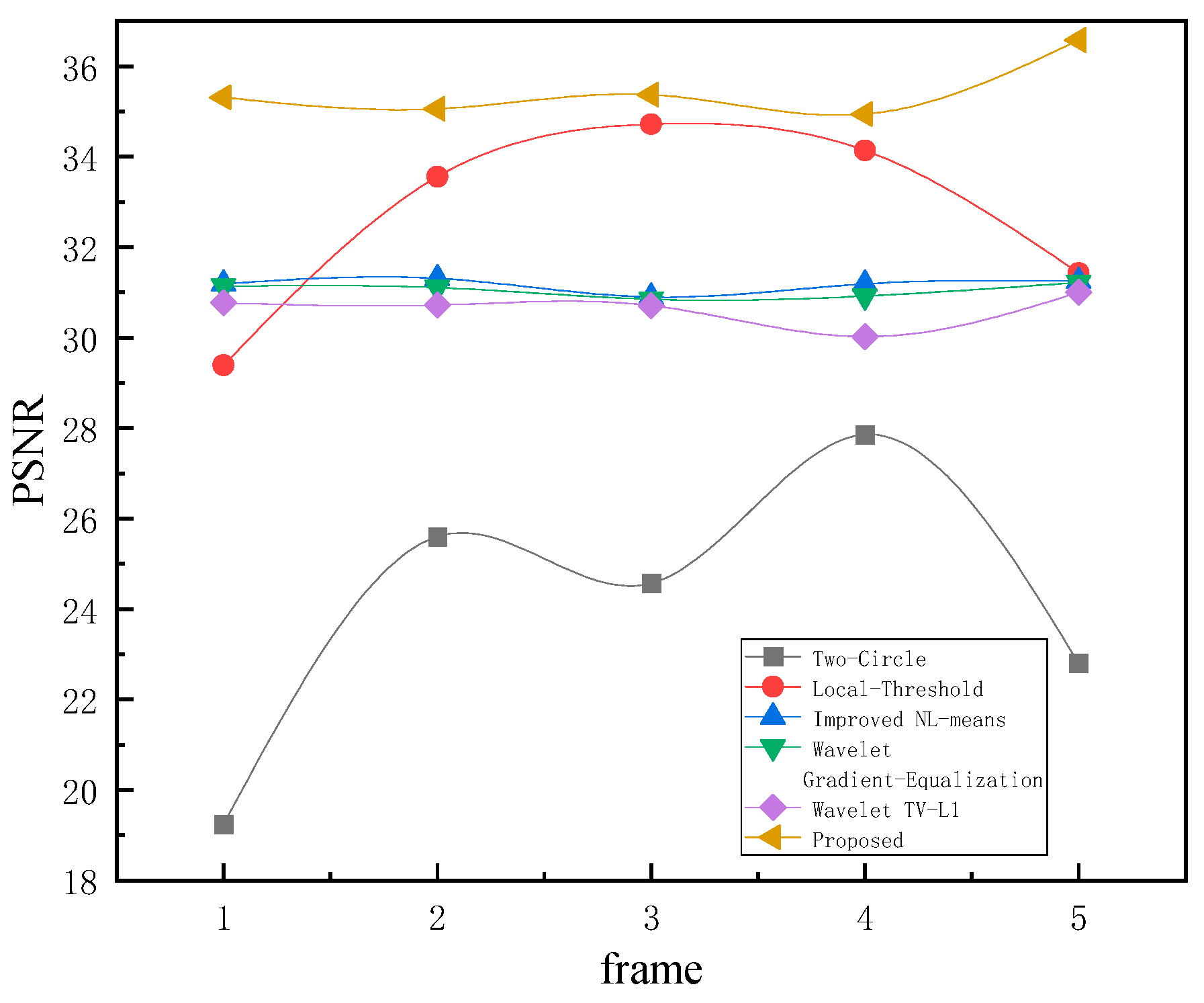
3.4. Simulation Experiment
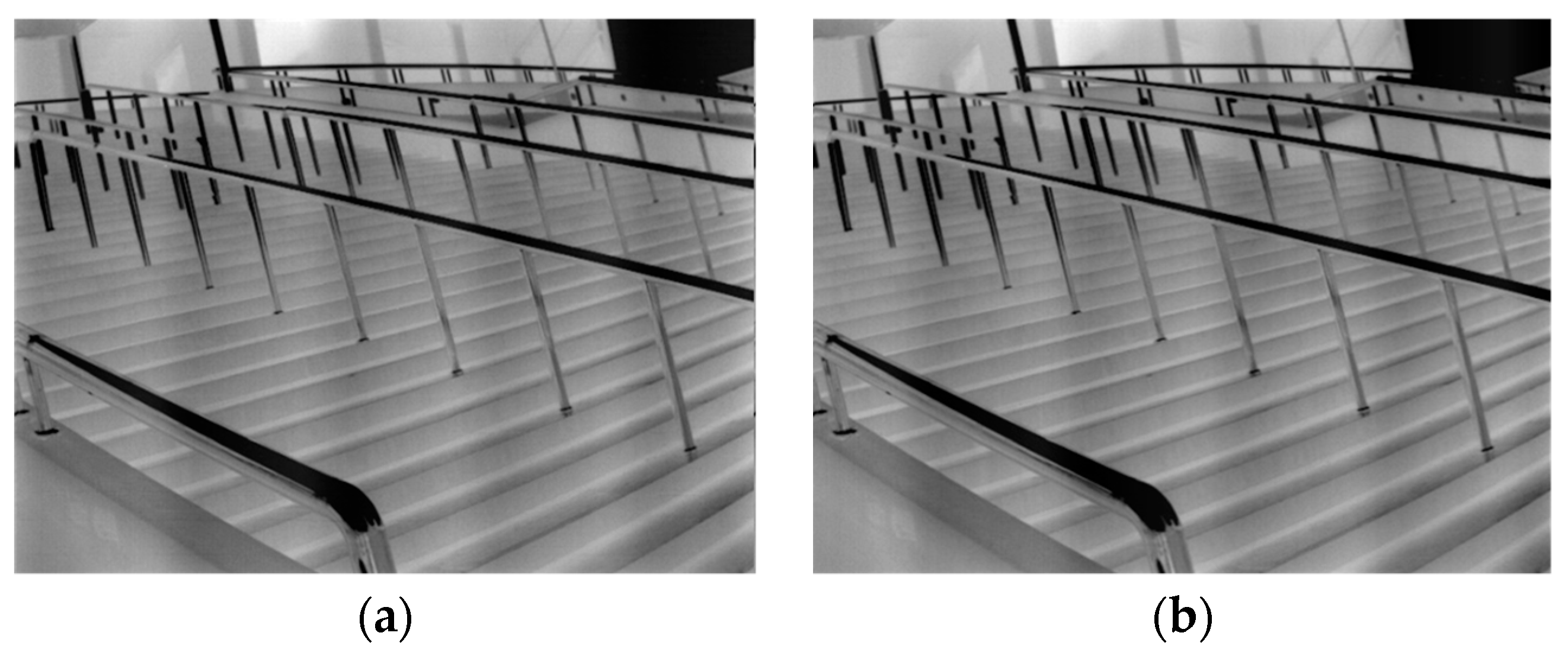
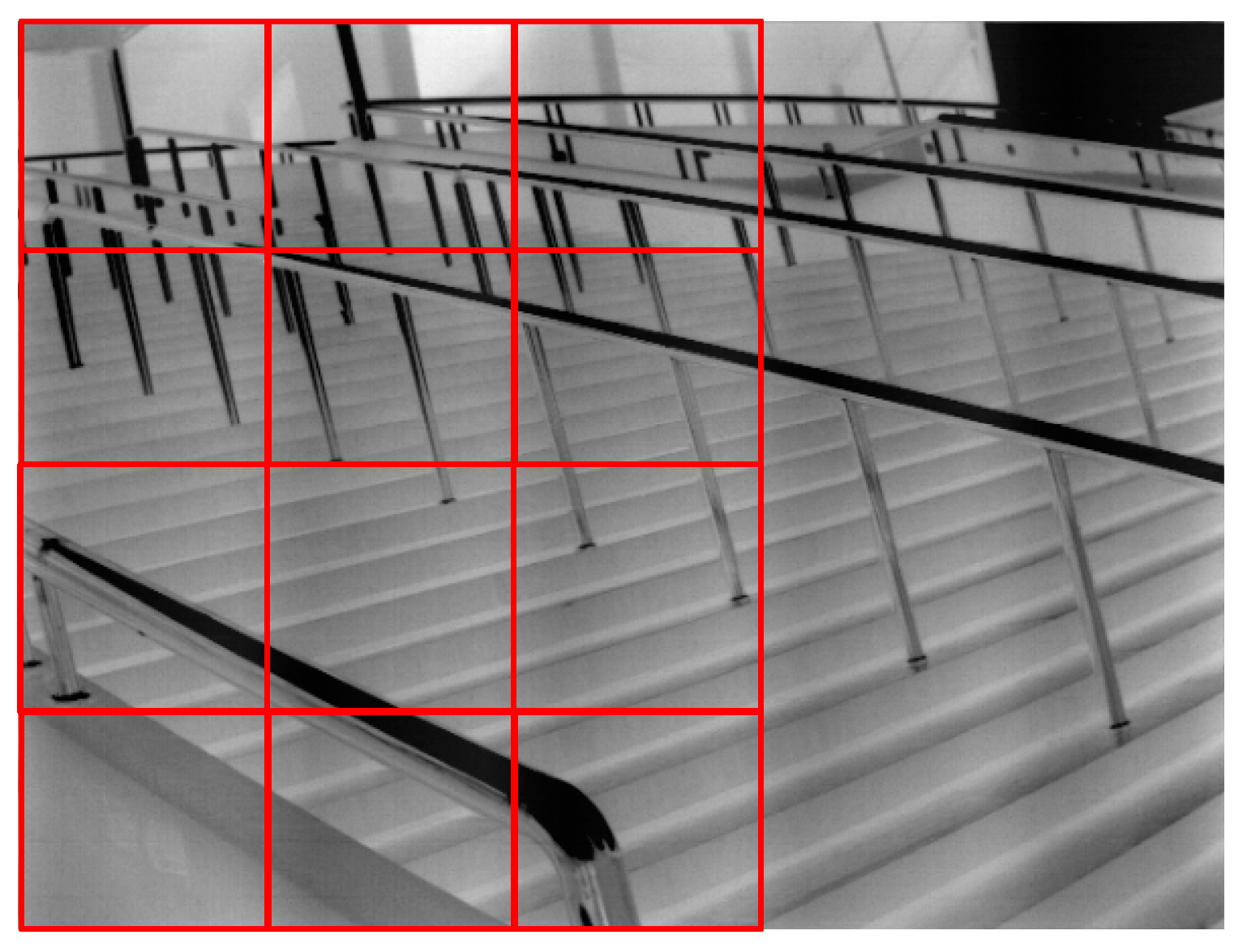
3.5. Real Data Experiment
3.6. Real-Time Performance of the Algorithm
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Y.-J.; Yang, J.-R.; He, L.; Zhang, Q.-Y.; Ding, R.-J.; Fang, W.-Z.; Chen, X.-Q.; Wei, Y.-F.; Wu, Y.; Chen, L.; et al. Long wave infrared 2048 elements linear HgCdTe focal plane array. J. Infrared Millim. Terahertz Waves 2009, 28, 90–92. [Google Scholar] [CrossRef]
- Jia, N. Research on the Key Technology of the Linear Infrared Detector Imaging and Image Processing. Master’s Thesis, Tianjin University, Tianjin, China, 2012. [Google Scholar]
- Yan, P.; Yao, S.; Zhu, Q.; Zhang, T.; Cui, W. Real-time detection and tracking of infrared small targets based on grid fast density peaks searching and improved KCF. Infrared Phys. Technol. 2022, 123, 104181. [Google Scholar] [CrossRef]
- Mu, J.; Li, W.; Rao, J.; Wei, H.; Li, F. Infrared small target detection using tri-layer template local difference measure. Opt. Precis. Eng. 2022, 30, 869–882. [Google Scholar] [CrossRef]
- Miao, C.K.; Lou, S.L.; Li, T.; Cai, H. Multi-label infrared image classification algorithm based on weakly supervised learning. Opt. Precis. Eng. 2022, 30, 2501–2509. [Google Scholar] [CrossRef]
- Mostafa, M.; Helmy, N.A.; Ibrahim, A.S.; Elsayad, M.; Hasanin, A.M. Accuracy of Infrared Thermography in Detecting Febrile Critically Ill Patients. Anaesth. Crit. Care Pain Med. 2021, 40, 100951. [Google Scholar] [CrossRef] [PubMed]
- Hu, L.M.; Zhang, Y.; Lou, C.F. Shortwave infrared visible-light face recognition based on content feature extraction. Opt. Precis. Eng. 2021, 29, 160–171. [Google Scholar] [CrossRef]
- Zhou, R.; Wen, Z.; Su, H. Detect submerged piping in river embankment by passive infrared thermography. Measurement 2022, 202, 111873. [Google Scholar] [CrossRef]
- Wang, C.; Tang, G.; Xiong, W.; Ma, Z.; Zhu, S. Infrared Precipitation Estimation using Convolutional neural network for FengYun satellites. J. Hydrol. 2021, 603, 127113. [Google Scholar] [CrossRef]
- Bharati, S.; Khan, T.Z.; Podder, P.; Hung, N.Q. A comparative analysis of image denoising problem: Noise models, denoising filters and applications. In Cognitive Internet of Medical Things for Smart Healthcare; Springer: Cham, Switzerland, 2021; pp. 49–66. [Google Scholar]
- Li, F.Z.; Zhao, Y.H.; Xiang, W.; Liu, H. Infrared image mixed noise removal method based on improved NL-means. Infrared Laser Eng. 2019, 48, 169–179. [Google Scholar]
- Li, M.X. Research on Stripe Noise Removal Algorithm for Infrared Images. Ph.D. Thesis, University of Chinese Academy of Sciences (Changchun Institute of Optics Fine Mechanics and Physics, Chinese Academy of Sciences), Beijing, China, 2022. [Google Scholar] [CrossRef]
- Li, K.; Li, W.; Han, C. The method based on L1 norm optimization model for stripe noise removal of remote sensing image. J. Infrared Millim. Terahertz Waves 2021, 40, 272–283. [Google Scholar]
- Riou, O.; Berrebi, S.; Bremond, P. Nonuniformity correction and thermal drift compensation of thermal infrared camera. In Proceedings of the Defense and Security, Orlando, FL, USA, 12–16 April 2004; International Society for Optics and Photonics: Bellingham, WA, USA, 2004; pp. 294–302. [Google Scholar]
- Aizenberg, I.; Butakoff, C. A windowed Gaussian notch filter for quasi-periodic noise removal. Image Vis. Comput. 2008, 26, 1347–1353. [Google Scholar] [CrossRef]
- Wang, E.; Jiang, P.; Hou, X.; Zhu, Y.; Peng, L. Infrared stripe correction algorithm based on wavelet analysis and gradient equalization. Appl. Sci. 2019, 9, 1993. [Google Scholar] [CrossRef]
- Wang, E.; Jiang, P.; Li, X.; Li, X.; Cao, H. Infrared stripe correction algorithm based on wavelet decomposition and total variation-guided filtering. J. Eur. Opt. Soc. Rapid Publ. 2020, 16, 1. [Google Scholar] [CrossRef]
- Hamd, M.H. Auto detection and removal of frequency domain periodic noise. In Proceedings of the 2014 IEEE Global Summit on Computer & Information Technology (GSCIT), Sousse, Tunisia, 14–16 June 2014; pp. 1–4. [Google Scholar]
- Yadav, V.P.; Singh, G.; Anwar, M.I.; Khosla, A. Periodic noise removal using local thresholding. In Proceedings of the 2016 Conference on Advances in Signal Processing (CASP), Pune, India, 9–11 June 2016; IEEE: New, York, NY, USA, 2016; pp. 114–117. [Google Scholar]
- Ilesanmi, A.E.; Ilesanmi, T.O. Methods for image denoising using convolutional neural network: A review. Complex Intell. Syst. 2021, 7, 2179–2198. [Google Scholar] [CrossRef]
- Liu, S.; Liu, T.; Gao, L.; Li, H.; Hu, Q.; Zhao, J.; Wang, C. Convolutional Neural Network and Guided Filtering for SAR Image Denoising. Remote Sens. 2019, 11, 702. [Google Scholar] [CrossRef]
- Lehtinen, J.; Munkberg, J.; Hasselgren, J.; Laine, S.; Karras, T.; Aittala, M.; Aila, T. Noise2Noise: Learning image restoration without clean data. arXiv 2018, arXiv:1803.04189. [Google Scholar]
- Jiao, Q.; Xu, J.; Liu, M.; Zhao, F.; Dong, L.; Hui, M.; Kong, L.; Zhao, Y. Fractional variation network for THz spectrum denoising without clean data. Fractal Fract. 2022, 6, 246. [Google Scholar] [CrossRef]
- Gebhardt, E.; Wolf, M. CAMEL Dataset for Visual and Thermal Infrared Multiple Object Detection and Tracking. In Proceedings of the IEEE International Conference on Advanced Video and Signal-Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard Deviation σ | PSNR |
|---|---|
| 0 | 32.83 |
| 7.65 | 32.72 |
| 17.85 | 32.71 |
| 28.05 | 32.72 |
| 38.25 | 32.70 |
| 48.45 | 32.71 |
| 58.65 | 32.30 |
| 68.85 | 31.69 |
| 79.05 | 31.65 |
| Image | PSNR | |||||
|---|---|---|---|---|---|---|
| Two-Circle | Local Threshold | Improved NL-Means | Wavelet Gradient-Equalization | Wavelet TV-L1 | Proposed | |
| IM1 | 19.24 | 29.39 | 31.19 | 31.14 | 30.77 | 35.31 |
| IM2 | 25.60 | 33.56 | 31.31 | 31.11 | 30.72 | 35.06 |
| IM3 | 24.57 | 34.72 | 30.90 | 30.85 | 30.71 | 35.37 |
| IM4 | 27.86 | 34.14 | 31.19 | 30.92 | 30.02 | 34.94 |
| IM5 | 22.80 | 29.43 | 31.25 | 31.22 | 31.00 | 36.58 |
| Dataset | 26.0 | 31.34 | 31.00 | 30.84 | 30.04 | 34.11 |
| Image | SSIM | |||||
|---|---|---|---|---|---|---|
| Two-Circle | Local Threshold | Improved NL-Means | Wavelet Gradient-Equalization | Wavelet TV-L1 | Proposed | |
| IM1 | 0.8319 | 0.9004 | 0.9213 | 0.9192 | 0.9090 | 0.9880 |
| IM2 | 0.9441 | 0.9701 | 0.9740 | 0.9679 | 0.9496 | 0.9889 |
| IM3 | 0.9813 | 0.9917 | 0.9872 | 0.9855 | 0.9789 | 0.9963 |
| IM4 | 0.9793 | 0.9908 | 0.9841 | 0.9730 | 0.9369 | 0.9943 |
| IM5 | 0.9175 | 0.9383 | 0.9347 | 0.9323 | 0.9173 | 0.9663 |
| Dataset | 0.9345 | 0.9596 | 0.9632 | 0.9566 | 0.9374 | 0.9874 |
| Algorithm | Time Taken (s) | ||||
|---|---|---|---|---|---|
| (Image Resolution) | 1024 × 4096 | 1024 × 6144 | 1024 × 8192 | 1024 × 10,240 | 1024 × 12,288 |
| Two-Circle | 0.26 | 0.46 | 0.59 | 0.74 | 0.91 |
| Local Threshold | 0.21 | 0.34 | 0.46 | 0.59 | 0.75 |
| Improved NL-means | 310.24 | 508.25 | 665.03 | 850.93 | 1006.72 |
| Wavelet and Gradient-Equalization | 50.27 | 80.78 | 99.41 | 128.73 | 147.27 |
| Wavelet and TV-L1 | 9.63 | 16.15 | 21.60 | 27.50 | 33.51 |
| Ours (FACD) | 0.07 | 0.11 | 0.14 | 0.18 | 0.22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Li, B. Overcoming Periodic Stripe Noise in Infrared Linear Array Images: The Fourier-Assisted Correlative Denoising Method. Sensors 2023, 23, 8716. https://doi.org/10.3390/s23218716
Chen W, Li B. Overcoming Periodic Stripe Noise in Infrared Linear Array Images: The Fourier-Assisted Correlative Denoising Method. Sensors. 2023; 23(21):8716. https://doi.org/10.3390/s23218716
Chicago/Turabian StyleChen, Weicong, and Bohan Li. 2023. "Overcoming Periodic Stripe Noise in Infrared Linear Array Images: The Fourier-Assisted Correlative Denoising Method" Sensors 23, no. 21: 8716. https://doi.org/10.3390/s23218716
APA StyleChen, W., & Li, B. (2023). Overcoming Periodic Stripe Noise in Infrared Linear Array Images: The Fourier-Assisted Correlative Denoising Method. Sensors, 23(21), 8716. https://doi.org/10.3390/s23218716