

The Frequency-Variable Rotor-Blade-Based Two-Degree-of-Freedom Actuation Principle for Linear and Rotary Motion

Abstract
:1. Introduction
2. Simulation Analysis of SRHFVS-FVPO and FVLRM
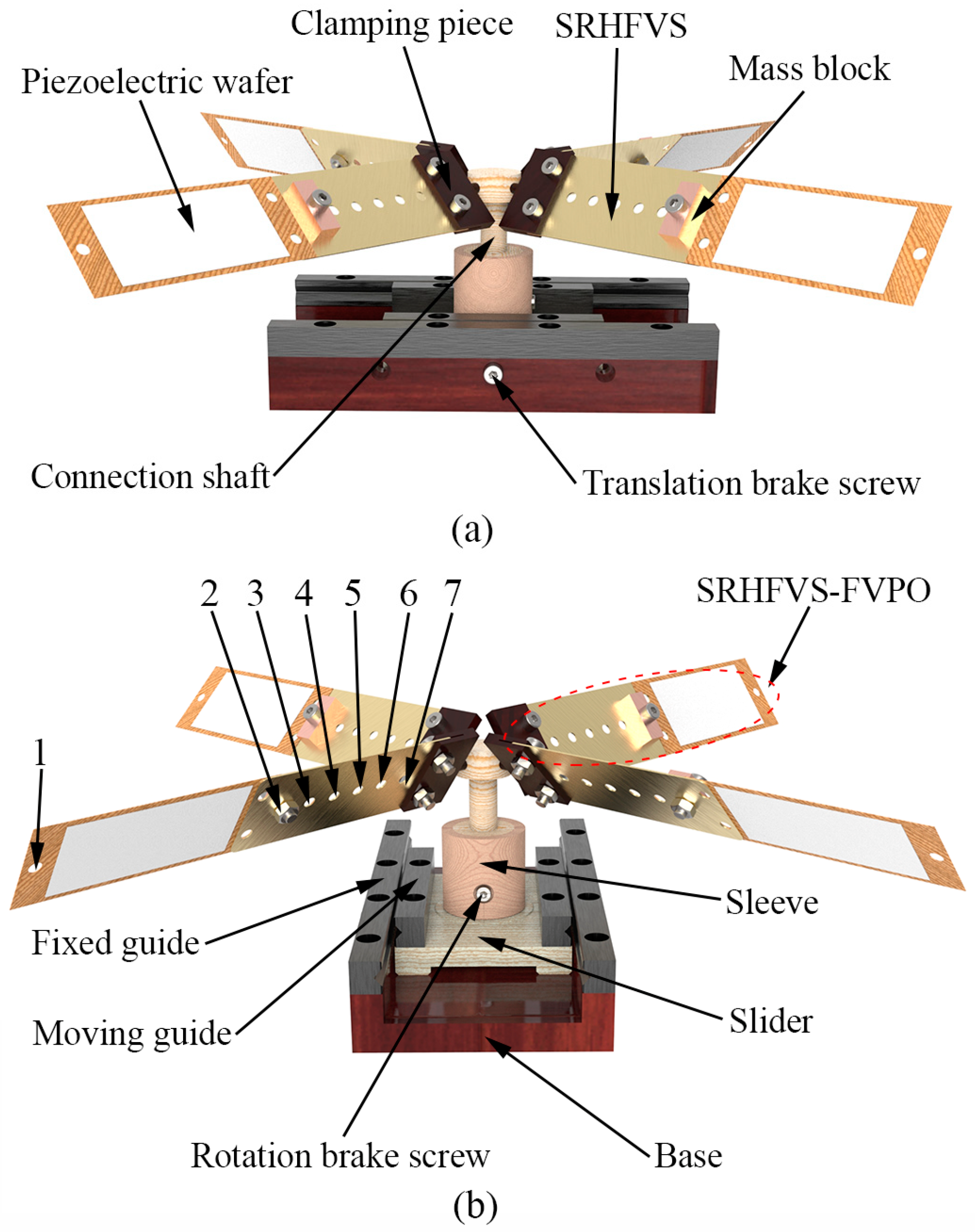
2.1. FVLRM Structure
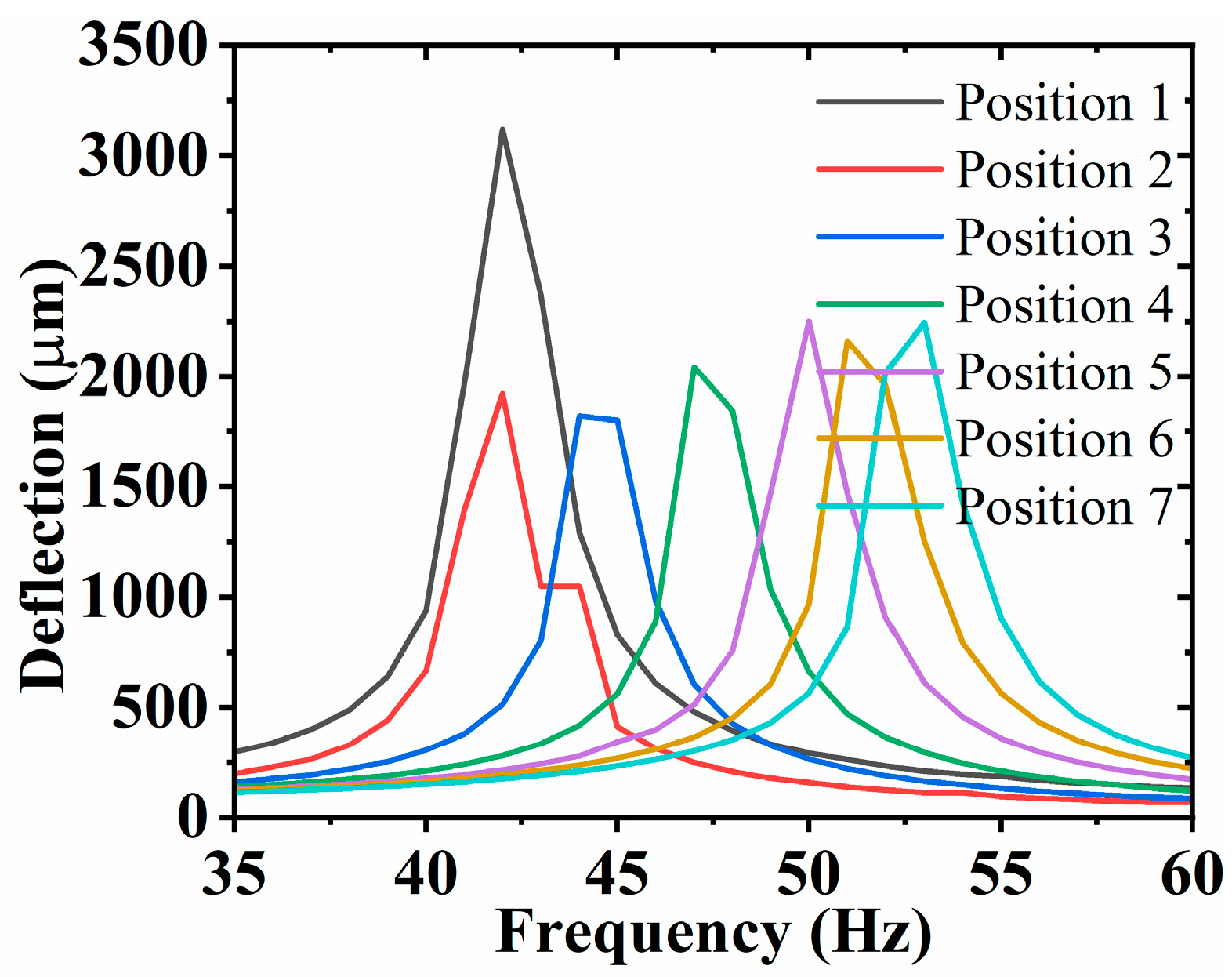
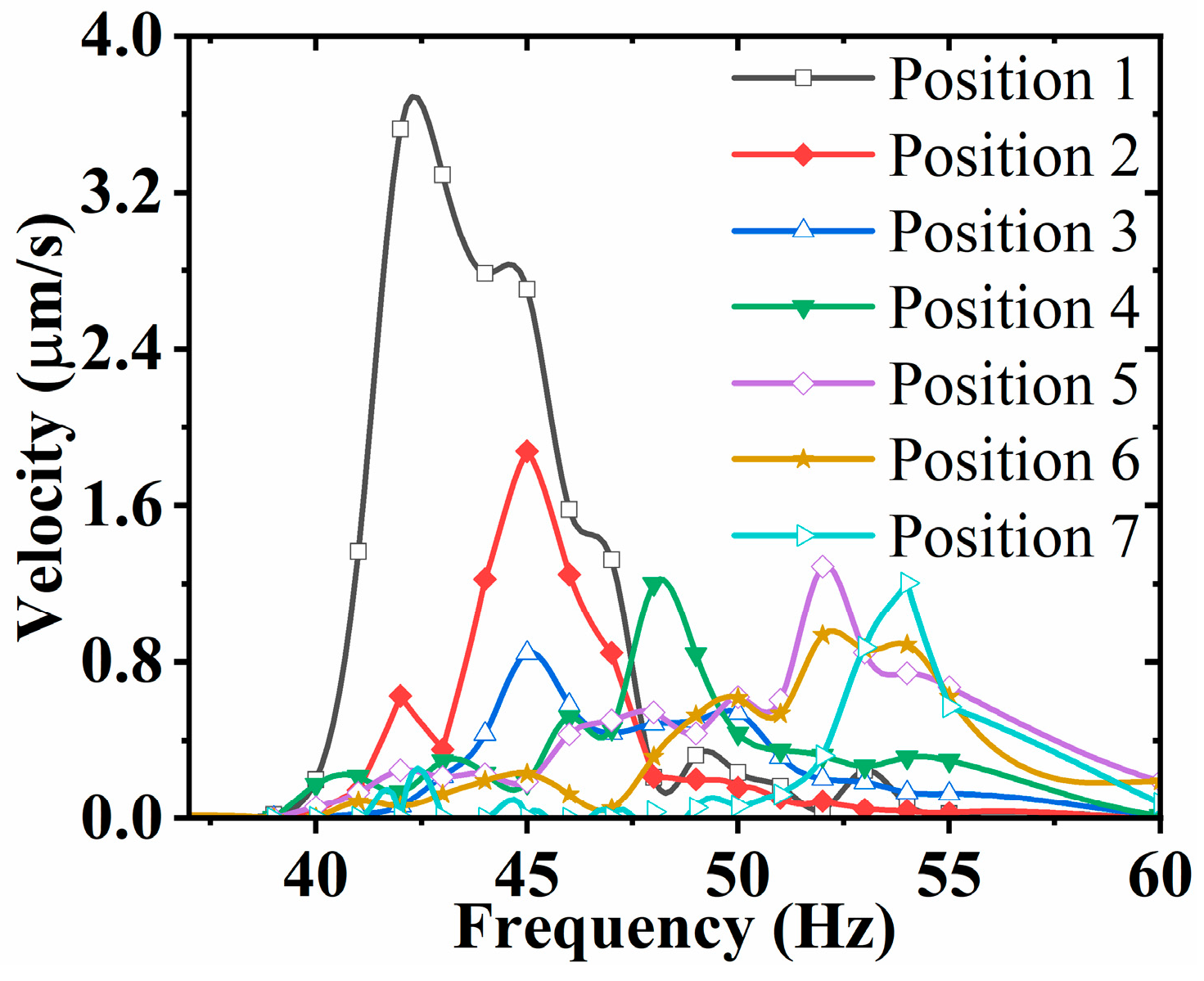
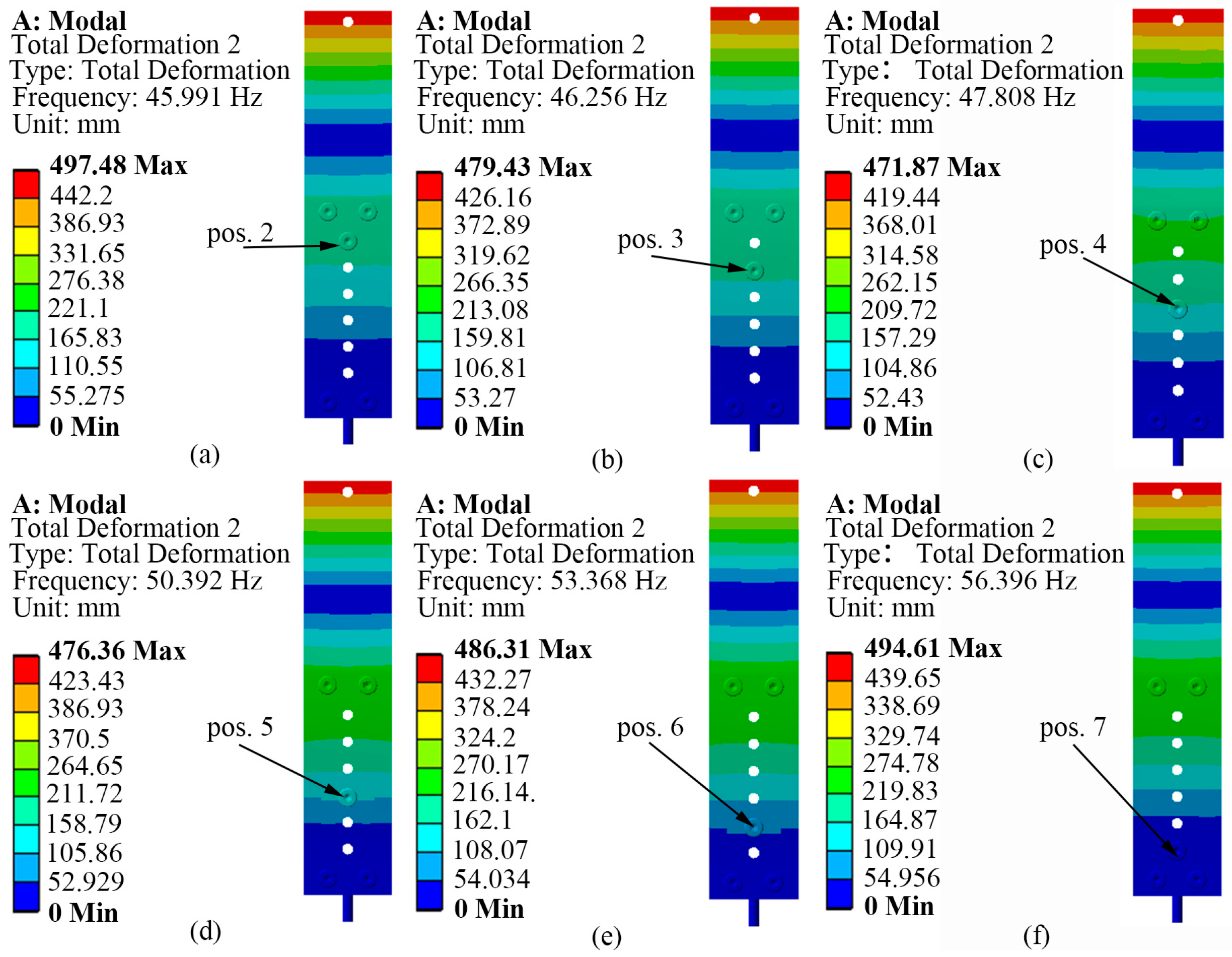
2.2. Simulation of SRHFVS-FVPO
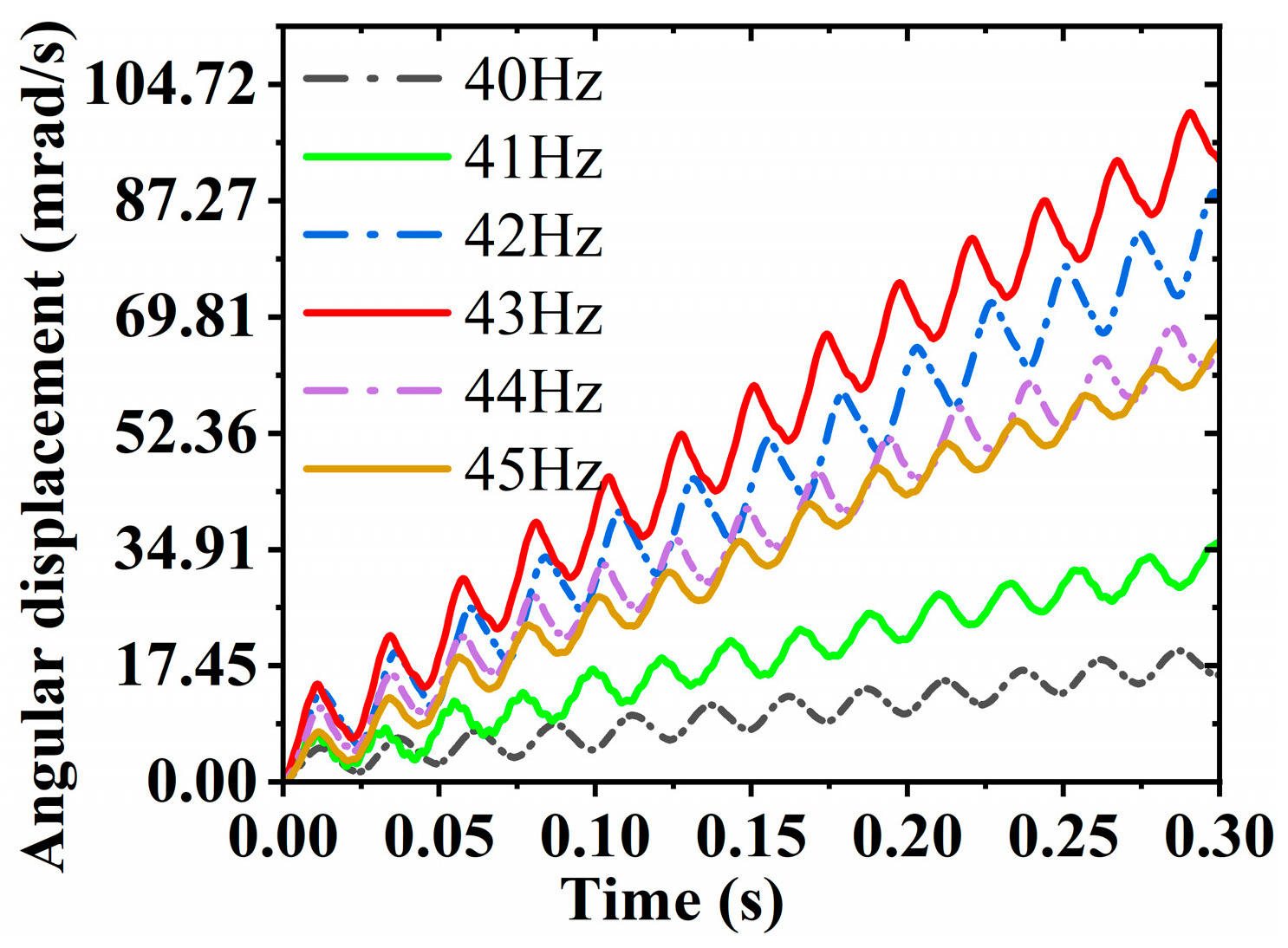
2.3. Simulation Analysis of FVLRM
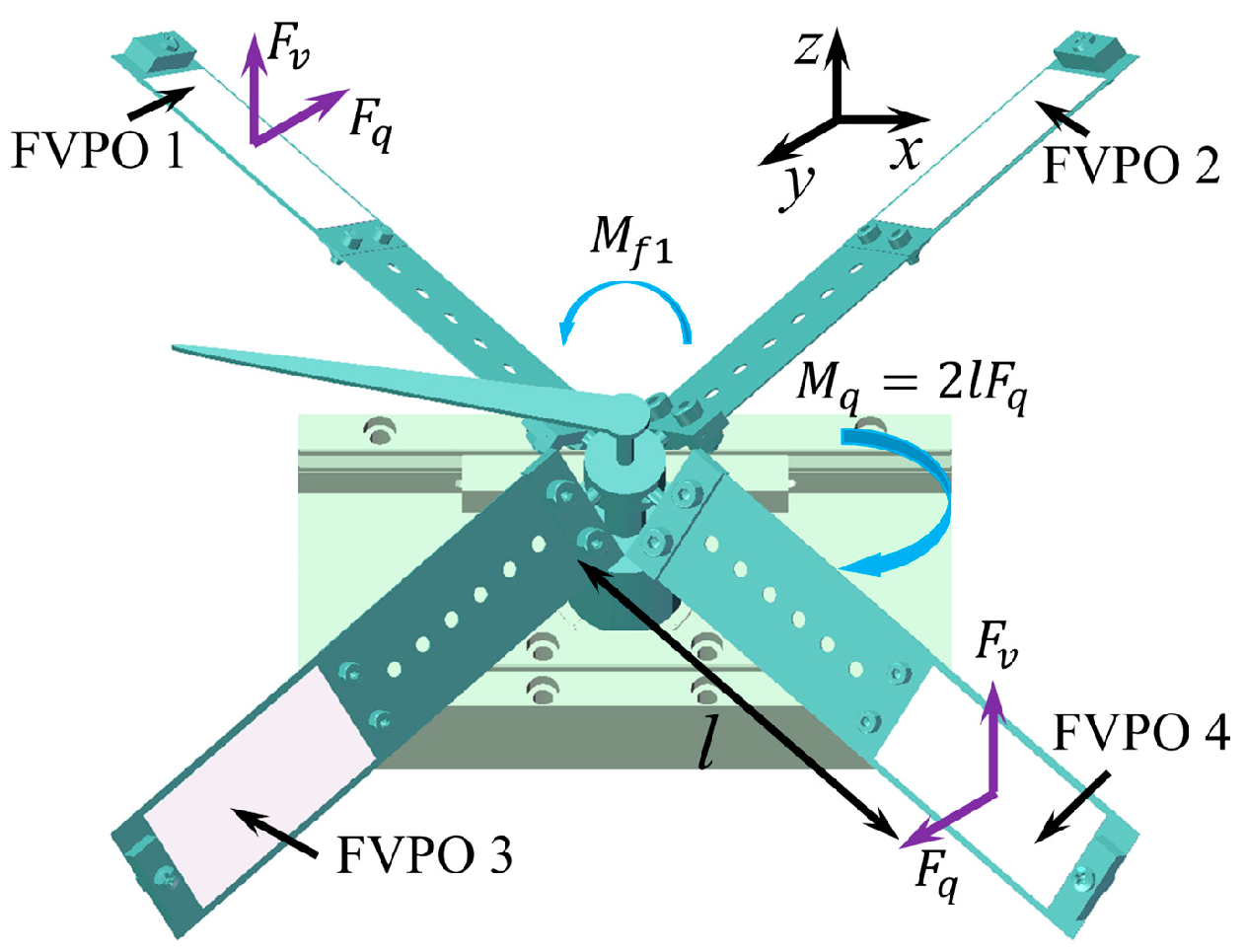
3. Motion Analysis of FVLRM
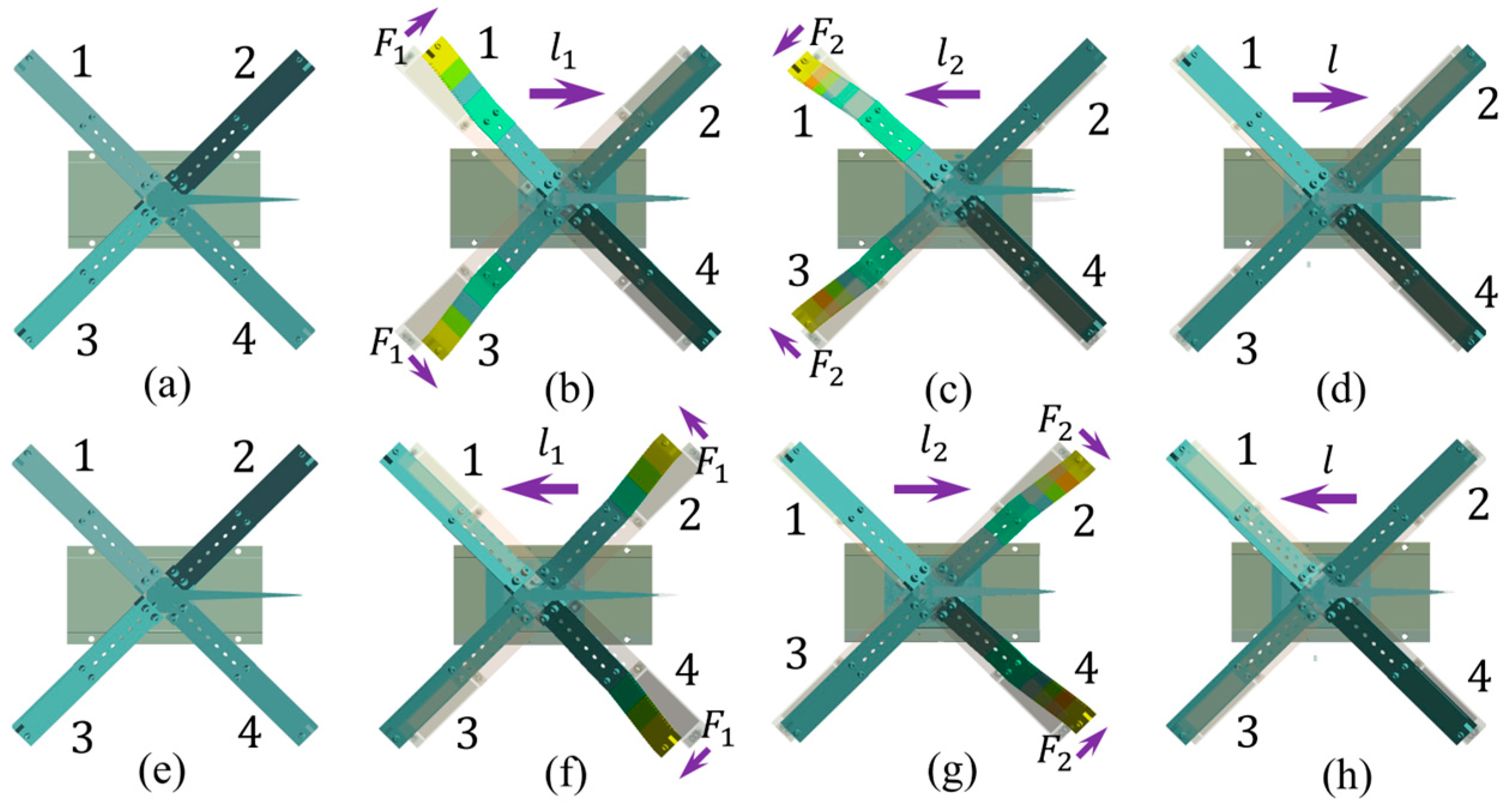
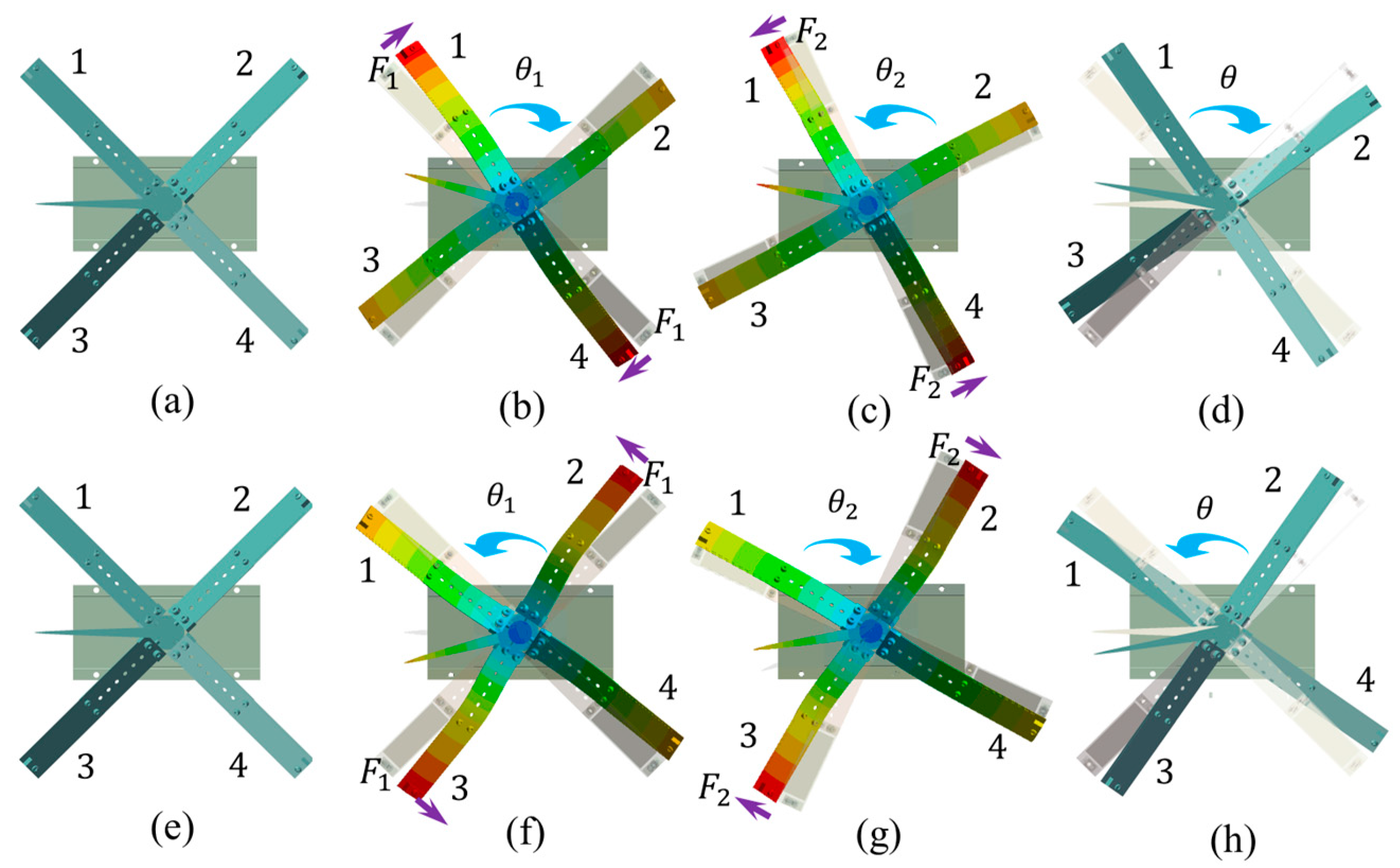
3.1. FVLRM Rotation Sequence Analysis
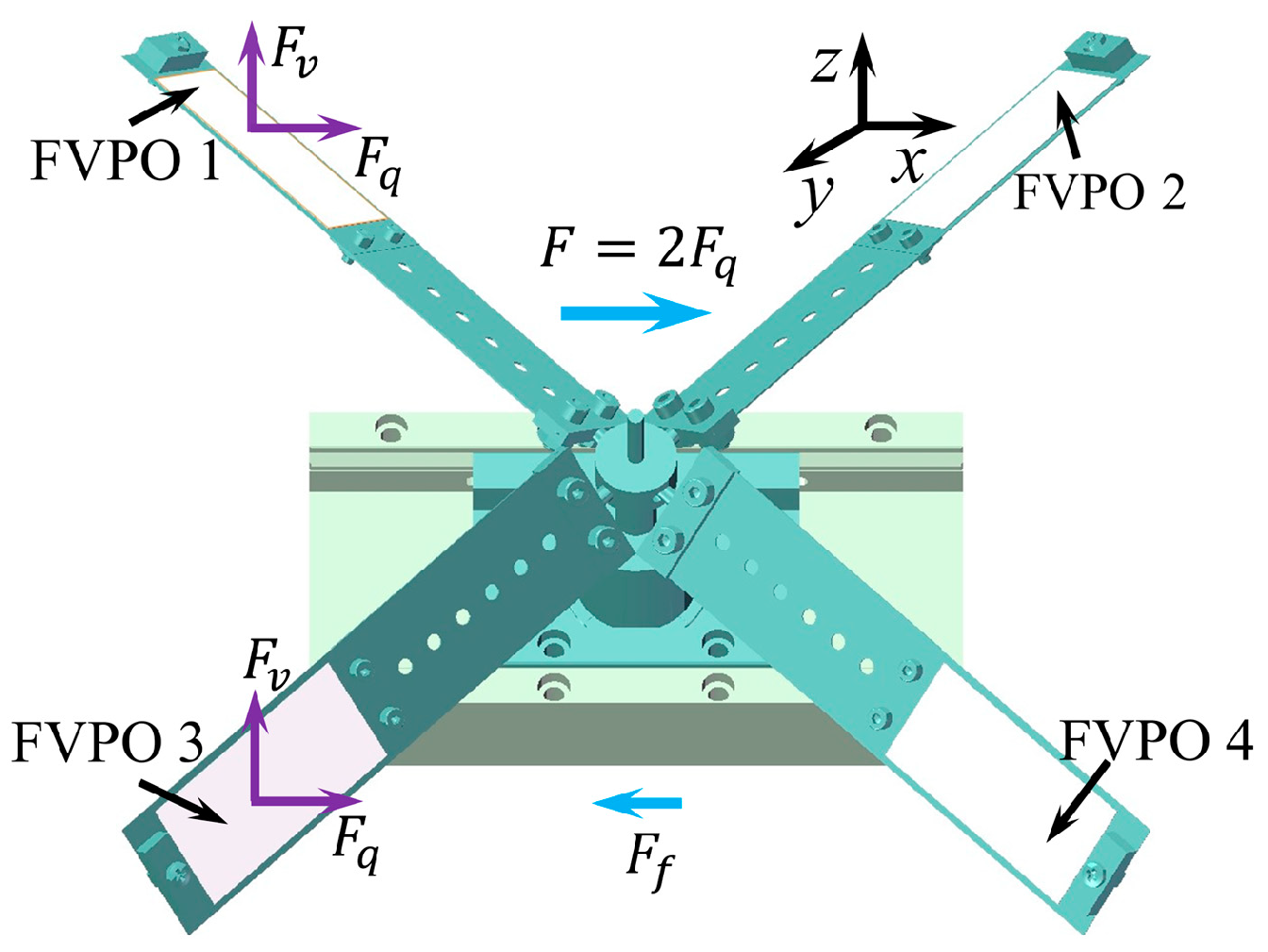
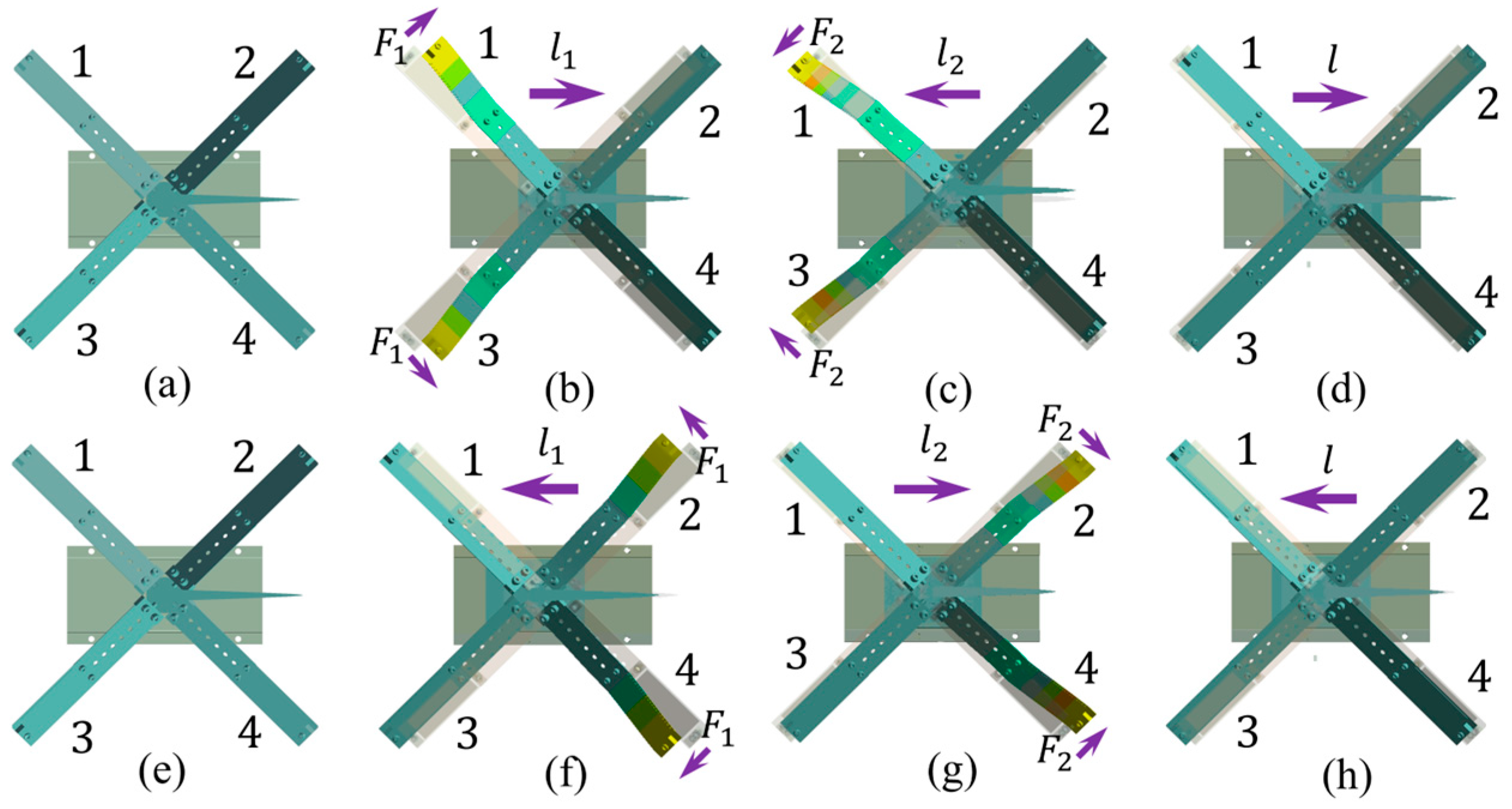
3.2. FVLRM Translation Sequence Analysis
4. Frequency Regulation Test of FVPO and Experiment Analysis of FVLRM
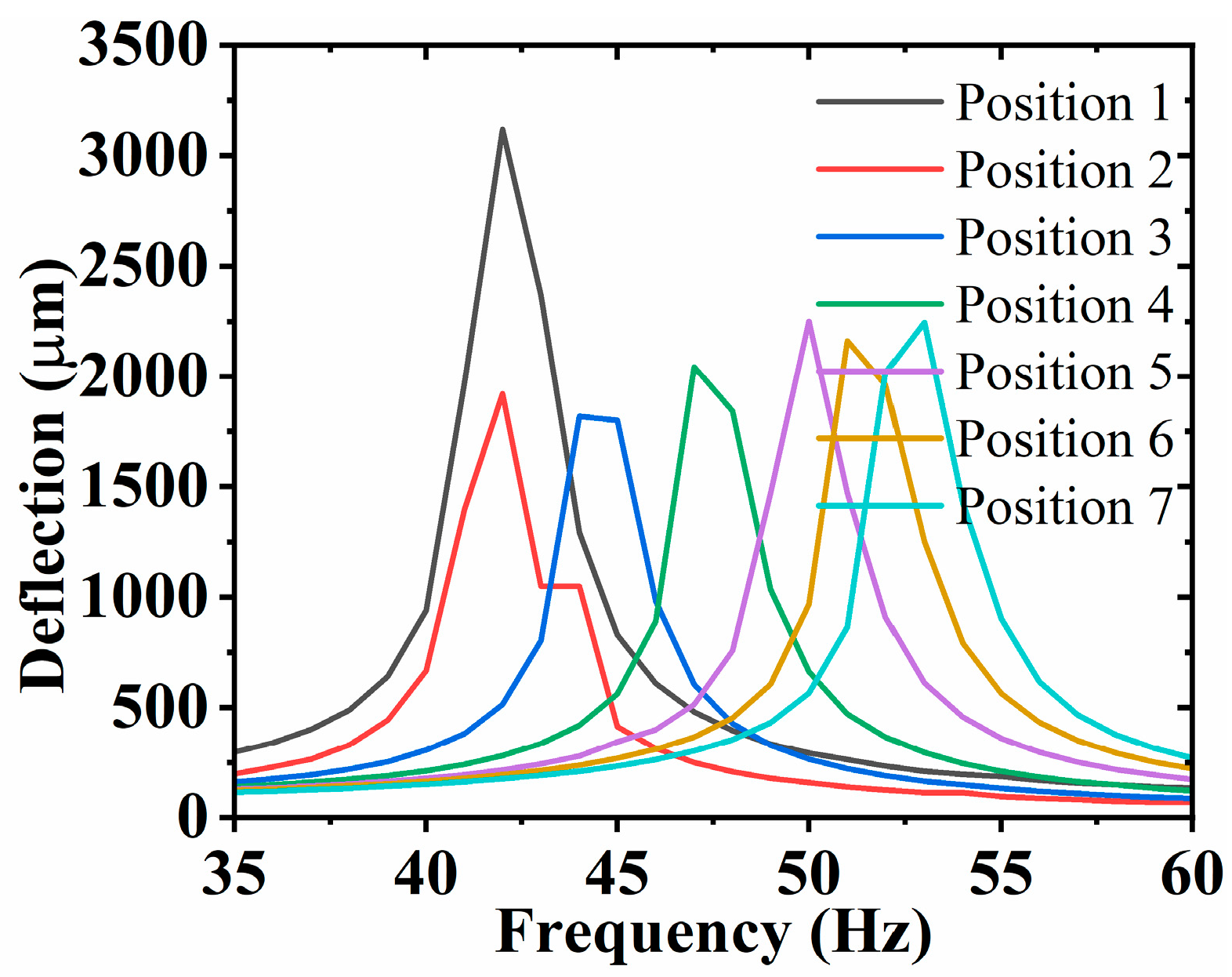
4.1. Frequency Regulation Test of FVPO
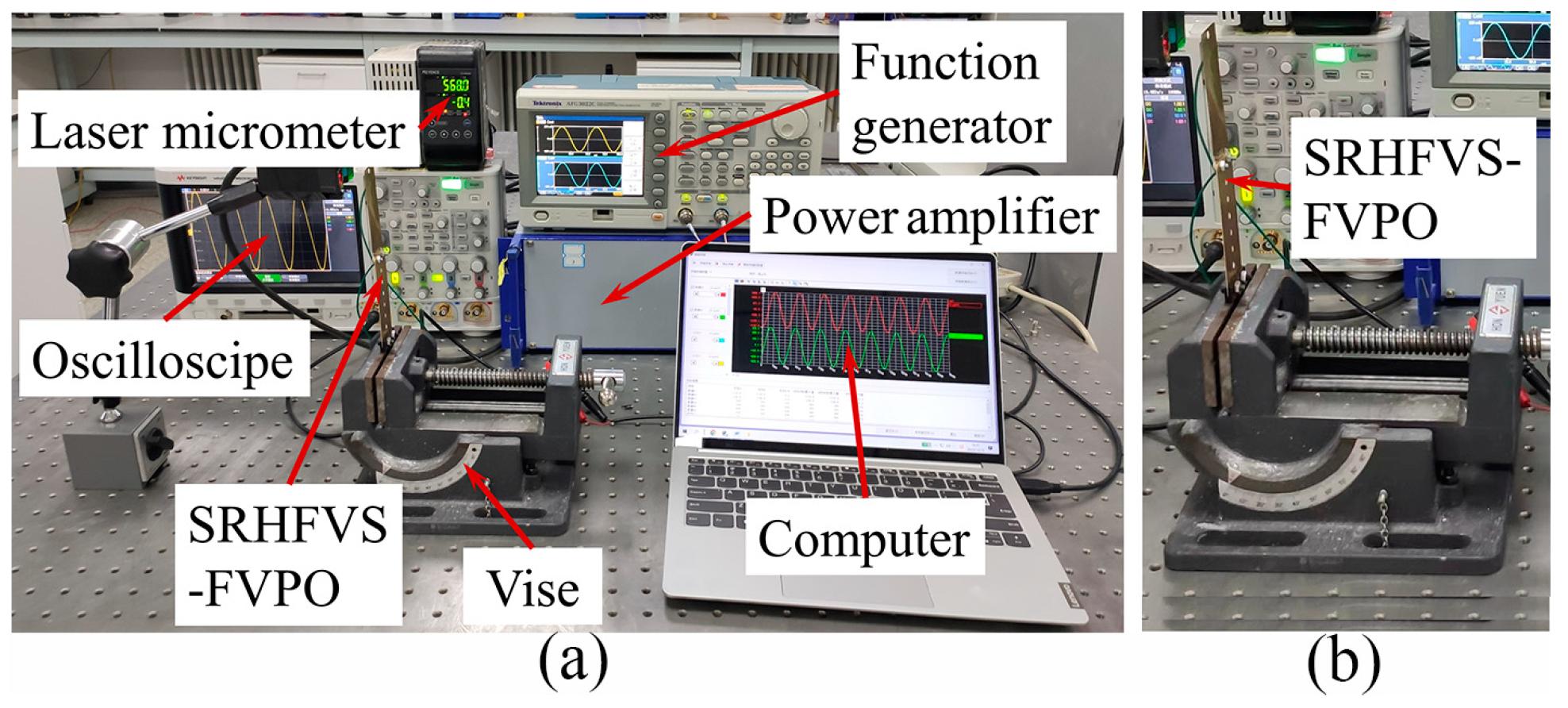
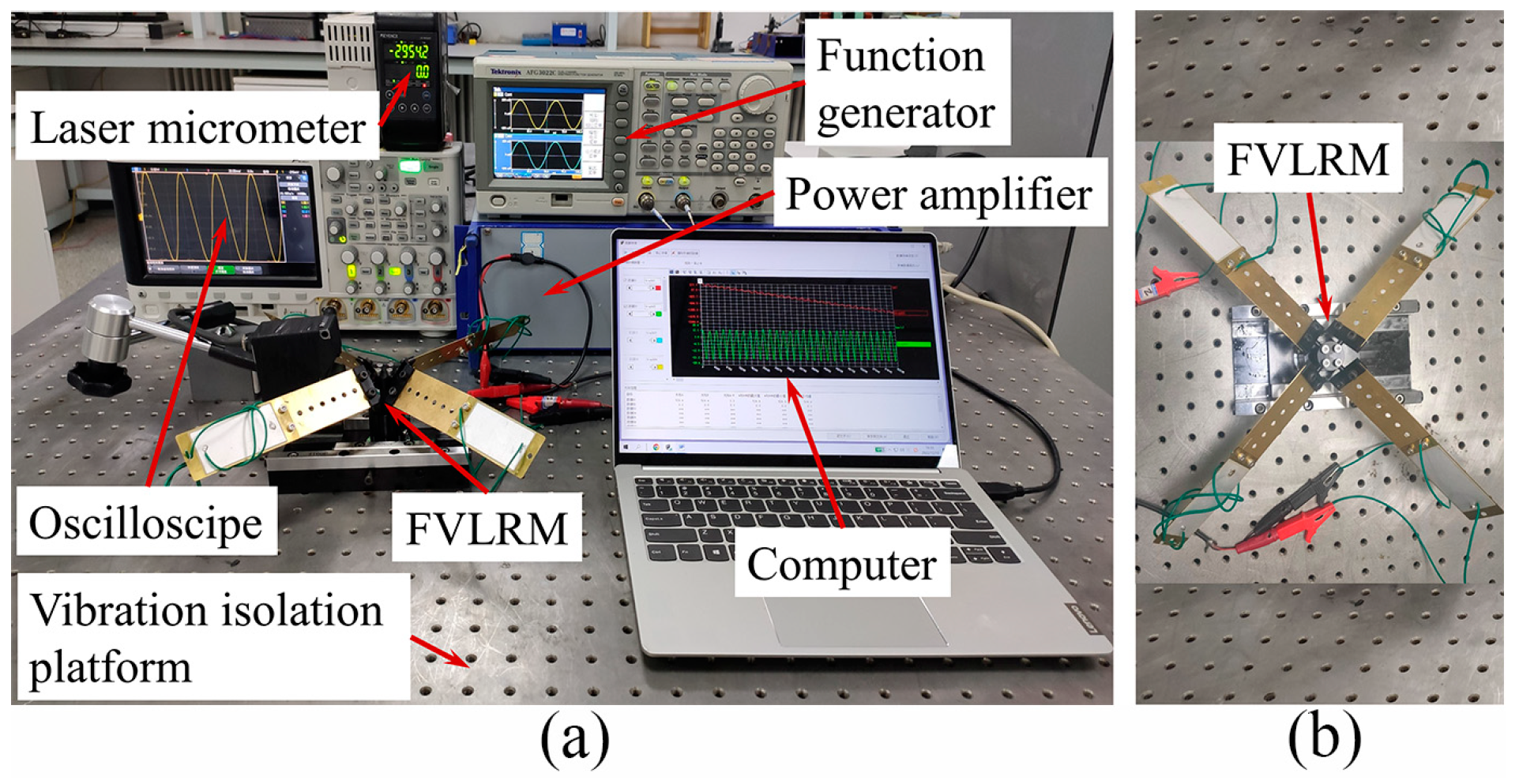
4.2. Experimental Instrumentations of FVLRM
4.3. Rotation Characteristics of FVLRM
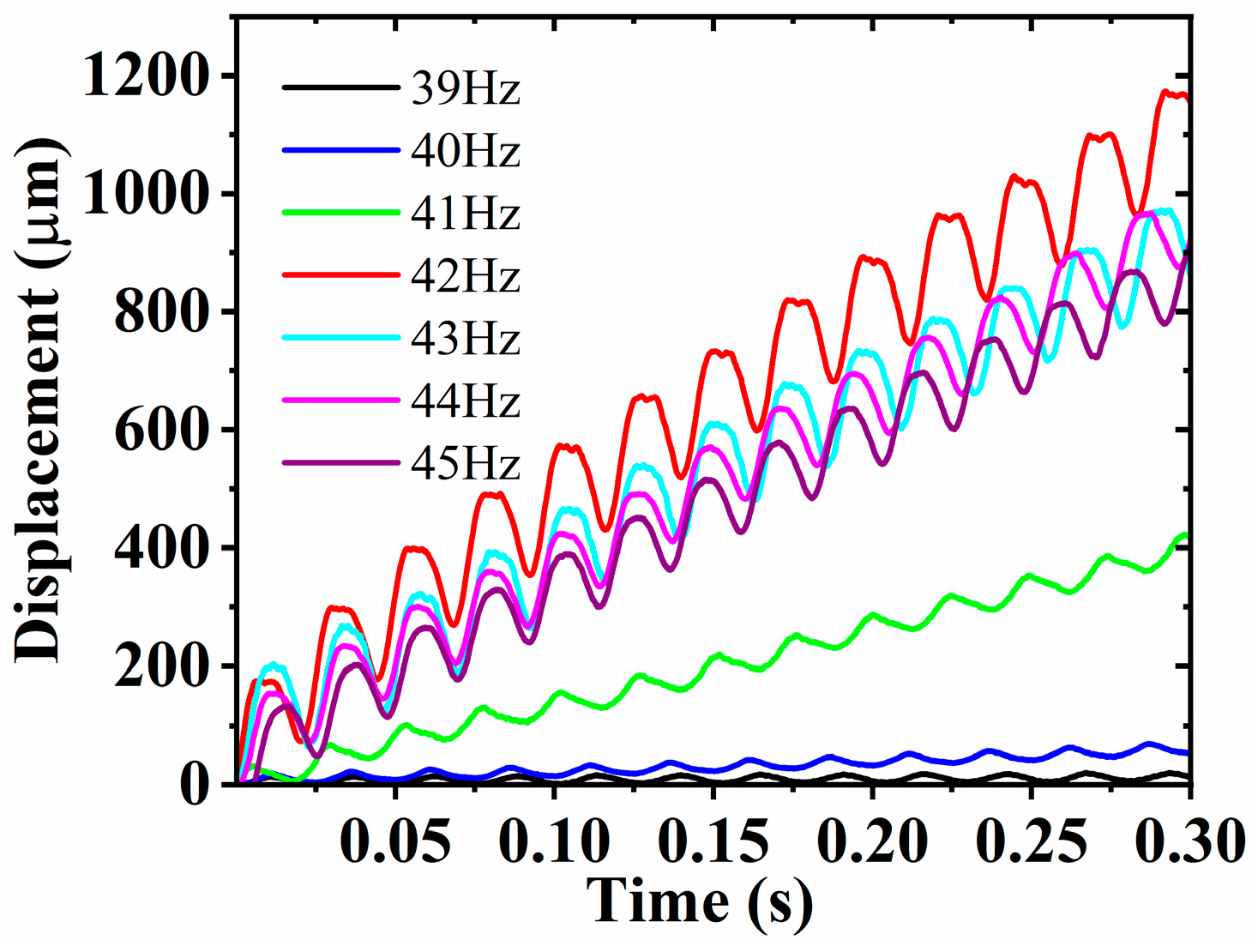
4.4. Linear Displacement Characteristics of FVLRM
4.5. Comparison with Other Piezoelectric Actuators
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rödel, J.; Webber, K.G.; Dittmer, R.; Jo, W.; Kimura, M.; Damjanovic, D. Transferring Lead-Free Piezoelectric Ceramics into Application. J. Eur. Ceram. Soc. 2015, 35, 1659–1681. [Google Scholar]
- Ryndzionek, R.; Sienkiewicz, L.; Michna, M.; Kutt, F. Design and Experiments of a Piezoelectric Motor Using Three Rotating Mode Actuators. Sensors 2019, 19, 5184. [Google Scholar]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent Trends in Piezoelectric Actuators for Precision Motion and Their Applications: A Review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar]
- Habib, M.; Lantgios, I.; Hornbostel, K. A Review of Ceramic, Polymer and Composite Piezoelectric Materials. J. Phys. D Appl. Phys. 2022, 55, 423002. [Google Scholar]
- Mohd Ghazali, F.A.; Hasan, M.N.; Rehman, T.; Nafea, M.; Mohamed Ali, M.S.; Takahata, K. MEMS Actuators for Biomedical Applications: A Review. J. Micromech. Microeng. 2020, 30, 073001. [Google Scholar]
- Ostasevicius, V.; Jurenas, V.; Gaidys, R.; Golinka, I.; Kizauskiene, L.; Mikuckyte, S. Development of a Piezoelectric Actuator for Separation and Purification of Biological Microparticles. Actuators 2020, 9, 61. [Google Scholar]
- Shin, D.H.; Cho, J.-H. Piezoelectric Actuator with Frequency Characteristics for a Middle-Ear Implant. Sensors 2018, 18, 1694. [Google Scholar]
- Ciou, Y.-S.; Lee, C.-Y. Controllable Preload Spindle with a Piezoelectric Actuator for Machine Tools. Int. J. Mach. Tool Manuf. 2019, 139, 60–63. [Google Scholar]
- Ghosh, B.; Jain, R.K.; Majumder, S.; Roy, S.; Mukhopadhyay, S. Experimental Characterizations of Bimorph Piezoelectric Actuator for Robotic Assembly. J. Intel. Mat. Syst. Str. 2017, 28, 2095–2109. [Google Scholar]
- Michael, A.; Kwok, C.Y. Piezoelectric Micro-Lens Actuator. Sens. Actuators Phys. A Phys. 2015, 236, 116–129. [Google Scholar]
- Ma, H.K.; Liao, S.K.; Lin, B.T. Application of Multiple Fans with a Piezoelectric Actuator System inside a Pico Projector. Int. Commun. Heat Mass Transf. 2016, 78, 80–87. [Google Scholar]
- Marcal, L.A.P.; Leao, J.V.F.; Nader, G.; Higuti, R.T.; Kitano, C.; Silva, E.C.N. Analysis of Linearity and Frequency Response of a Novel Piezoelectric Flextensional Actuator Using a Homodyne Interferometer and the J1–J4 Method. IEEE Trans. Instrum. Meas. 2007, 56, 954–961. [Google Scholar]
- Huang, W.; Lian, J.; An, D.; Chen, M.; Lei, Y. Bidirectional Drive with Inhibited Hysteresis for Piezoelectric Actuators. Sensors 2022, 22, 1546. [Google Scholar] [PubMed]
- Wang, X.; Yang, B.; Liu, J.; He, Q.; Guo, H.; Yang, C.; Chen, X. Flexible Triboelectric and Piezoelectric Coupling Nanogenerator Based on Electrospinning P(VDF-TRFE) Nanowires. In Proceedings of the 28th IEEE International Conference on Micro Electro Mechanical Systems, Estoril, Portugal, 18–22 January 2015. [Google Scholar]
- Liseli, J.B.; Agnus, J.; Lutz, P.; Rakotondrabe, M. An Overview of Piezoelectric Self-Sensing Actuation for Nanopositioning Applications: Electrical Circuits, Displacement, and Force Estimation. IEEE Trans. Instrum. Meas. 2020, 69, 2–14. [Google Scholar]
- Li, L.; Huang, W.-W.; Wang, X.; Zhu, L. Dual-Notch-Based Repetitive Control for Tracking Lissajous Scan Trajectories With Piezo-Actuated Nanoscanners. IEEE Trans. Instrum. Meas. 2022, 71, 4503612. [Google Scholar]
- Fan, X.-G.; Zhi, Y.-L.; Liao, C.; Shen, J.; Wang, X. A Nano Positioning Platform for STM and Its Compound Control Algorithm. IEEE Trans. Instrum. Meas. 2022, 71, 2001709. [Google Scholar]
- Smith, R.D.; Kolb, I.; Tanaka, S.; Lee, A.K.; Harris, T.D.; Barbic, M. Robotic Multi-Probe Single-Actuator Inchworm Neural Microdrive. eLife 2022, 11, e71876. [Google Scholar]
- Shields, J. Asynchronous Control of a Prototype Inchworm Actuator: Control Design and Test Results. Actuators 2019, 8, 20. [Google Scholar]
- Li, Z.; Su, Z.; Wang, H.; Du, S.; Sun, H. Design and Locomotion Study of Two-DOF Actuator Driven by Piezoelectric–Electromagnetic Hybrid Mode. Sensors 2022, 22, 3739. [Google Scholar]
- Tanoue, Y.; Morita, T. Rod Drive Type Ultrasonic Linear Motor with Quadruped Stator. Jpn. J. Appl. Phys. 2020, 59, SKKD13. [Google Scholar]
- Ryndzionek, R.; Sienkiewicz, L.; Michna, M.; Chodnicki, M. Design Evolution of the Ultrasonic Piezoelectric Motor Using Three Rotating Mode Actuators. IEEE Access 2021, 9, 79416–79423. [Google Scholar]
- Lu, Q.; Wen, J.; Hu, Y.; Chen, K.; Bao, H.; Ma, J. Novel Inertial Piezoelectric Actuator with High Precision and Stability Based on a Two Fixed-End Beam Structure. Smart Mater. Struct. 2019, 28, 015030. [Google Scholar]
- Zhang, E.; Hu, Y.; Bao, H.; Li, J.; Ma, J.; Wen, J. A Linear Inertial Piezoelectric Actuator Using a Single Bimorph Vibrator. Smart Mater. Struct. 2019, 28, 115020. [Google Scholar]
- Dong, J.; Zhang, B.; Li, X.; Xu, Z.; Wang, J.; Liu, C.; Cao, Y. A Stick-Slip Piezoelectric Actuator with Suppressed Backward Motion Achieved Using an Active Locking Mechanism (ALM). Smart Mater. Struct. 2021, 30, 095015. [Google Scholar]
- Zhong, B.; Liu, B.; Jin, Z.; Wang, Z.; Sun, L. Cubic Centimeter Robot Based on Inertial Stick–Slip Driving. Microsyst. Technol. 2020, 26, 437–445. [Google Scholar]
- Yokozawa, H.; Doshida, Y.; Kishimoto, S.; Morita, T. Resonant-Type Smooth Impact Drive Mechanism Actuator Using Lead-Free Piezoelectric Material. Sens. Actuators Phys. 2018, 274, 179–183. [Google Scholar]
- Yang, S.; Li, Y.; Qiao, G.; Ning, P.; Lu, X.; Cheng, T. Piezoelectric Stick-Slip Actuator Integrated with Ultrasonic Vibrator for Improving Comprehensive Output Performance. Smart Mater. Struct. 2021, 30, 125033. [Google Scholar]
- Huang, H.; Xu, Z.; Wang, J.; Dong, J. A Low Frequency Operation High Speed Stick-Slip Piezoelectric Actuator Achieved by Using a L-Shape Flexure Hinge. Smart Mater. Struct. 2020, 29, 065007. [Google Scholar]
- Sun, W.; Xu, Z.; Wang, K.; Li, X.; Tang, J.; Yang, Z.; Huang, H. An Impact Inertial Piezoelectric Actuator Designed by Means of the Asymmetric Friction. IEEE Trans. Ind. Electron. 2023, 70, 699–708. [Google Scholar]
- Pinskier, J.; Shirinzadeh, B.; Al-Jodah, A. Design and Evaluation of a Dual-Stage, Compensated Stick-Slip Actuator for Long-Range, Precision Compliant Mechanisms. Sens. Actuators Phys. 2021, 331, 113007. [Google Scholar]
- Xu, Z.; Yang, Z.; Wang, K.; Li, X.; Liu, Y.; Dong, J.; Huang, H. A Bionic Inertial Piezoelectric Actuator with Improved Frequency Bandwidth. Mech. Syst. Signal Process. 2021, 156, 107620. [Google Scholar]
- Hu, Y.; Ma, J.; Zhang, Y.; Li, J.; Hu, Y.; Wen, J. Performance Comparison of Two Motion Modes of a Piezoelectric Inertial Linear Motor and Its Potential Application in Cell Manipulation. Mech. Syst. Signal Process. 2021, 157, 107743. [Google Scholar]
- Zhang, S.; Liu, J.; Deng, J.; Liu, Y. Development of a Novel Two-DOF Pointing Mechanism Using a Bending–Bending Hybrid Piezoelectric Actuator. IEEE Trans. Ind. Electron. 2019, 66, 7861–7872. [Google Scholar]
- Wang, Y.; Xu, Z.; Huang, H. A Novel Stick-Slip Piezoelectric Rotary Actuator Designed by Employing a Centrosymmetric Flexure Hinge Mechanism. Smart Mater. Struct. 2020, 29, 125006. [Google Scholar]
- Li, J.; Zhang, S.; Liu, Y.; Deng, J.; Ma, X. A 3-DOF Inertial Impact Locomotion Robot Constructed on Four Piezoelectric Bimorph Actuators. Smart Mater. Struct. 2022, 31, 095008. [Google Scholar]
- Liu, R.; Wang, L.; Jin, J.; Zhao, H. A Novel 2-Dof Ultrasonic Motor Design, Simulation, and Experimental Investigation. In Proceedings of the 16th Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, Nanjing, China, 11–14 October 2022. [Google Scholar]
- Huang, W.; Lei, Y.; An, D.; Su, Y.; Liang, Z. Design and Analysis of a Novel 2-DOF Rotation-Translation Precision Positioning Stage. Mathematics 2023, 11, 280. [Google Scholar]
- Rao, S.S. Mechanical Vibrations, 5th ed.; Prentice Hall: Hoboken, NJ, USA, 2011. [Google Scholar]
- Liang, C.; Wang, F.; Huo, Z.; Shi, B.; Tian, Y.; Zhao, X.; Zhang, D. A 2-DOF Monolithic Compliant Rotation Platform Driven by Piezoelectric Actuators. IEEE Trans. Ind. Electron. 2020, 67, 6963–6974. [Google Scholar]
- Deng, J.; Liu, S.; Liu, Y.; Wang, L.; Gao, X.; Li, K. A 2-DOF Needle Insertion Device Using Inertial Piezoelectric Actuator. IEEE Trans. Ind. Electron. 2022, 69, 3918–3927. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuator | DOF | Resonant Operating Frequency | Maximum Speed | Working Stroke | Variable Natural Frequency |
|---|---|---|---|---|---|
| [36] | 2 L + 1 R | 93.5 Hz | 76.7 μm/s 161.7 μrad/s | N/A | No |
| [38] | 1 L + 1 R | 662.7 Hz | N/A | 95 μm 22.9 mrad | No |
| [40] | 2 R | 100 Hz | N/A | 2.12 mrad 2.01 mrad | No |
| [41] | 1 L + 1 R | 1730.2 Hz | 382 μm/s 200.9 mrad/s | N/A | No |
| This work | 1 L + 1 R | 42 Hz | 3.52 mm/s 286.9 mrad/s | 144 mm 360° | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wang, S.; Peng, X.; Xu, G.; Dong, J.; Tian, F.; Zhang, Q. The Frequency-Variable Rotor-Blade-Based Two-Degree-of-Freedom Actuation Principle for Linear and Rotary Motion. Sensors 2023, 23, 8314. https://doi.org/10.3390/s23198314
Li X, Wang S, Peng X, Xu G, Dong J, Tian F, Zhang Q. The Frequency-Variable Rotor-Blade-Based Two-Degree-of-Freedom Actuation Principle for Linear and Rotary Motion. Sensors. 2023; 23(19):8314. https://doi.org/10.3390/s23198314
Chicago/Turabian StyleLi, Xiaotao, Shengjiang Wang, Xiangyou Peng, Guan Xu, Jingshi Dong, Fengjun Tian, and Qiuyu Zhang. 2023. "The Frequency-Variable Rotor-Blade-Based Two-Degree-of-Freedom Actuation Principle for Linear and Rotary Motion" Sensors 23, no. 19: 8314. https://doi.org/10.3390/s23198314
APA StyleLi, X., Wang, S., Peng, X., Xu, G., Dong, J., Tian, F., & Zhang, Q. (2023). The Frequency-Variable Rotor-Blade-Based Two-Degree-of-Freedom Actuation Principle for Linear and Rotary Motion. Sensors, 23(19), 8314. https://doi.org/10.3390/s23198314