



Implementation of MEC-Assisted Collective Perception in an Integrated Artery/Simu5G Simulation Framework


Abstract
:1. Introduction
2. Background
2.1. Relevant V2X Access Technologies
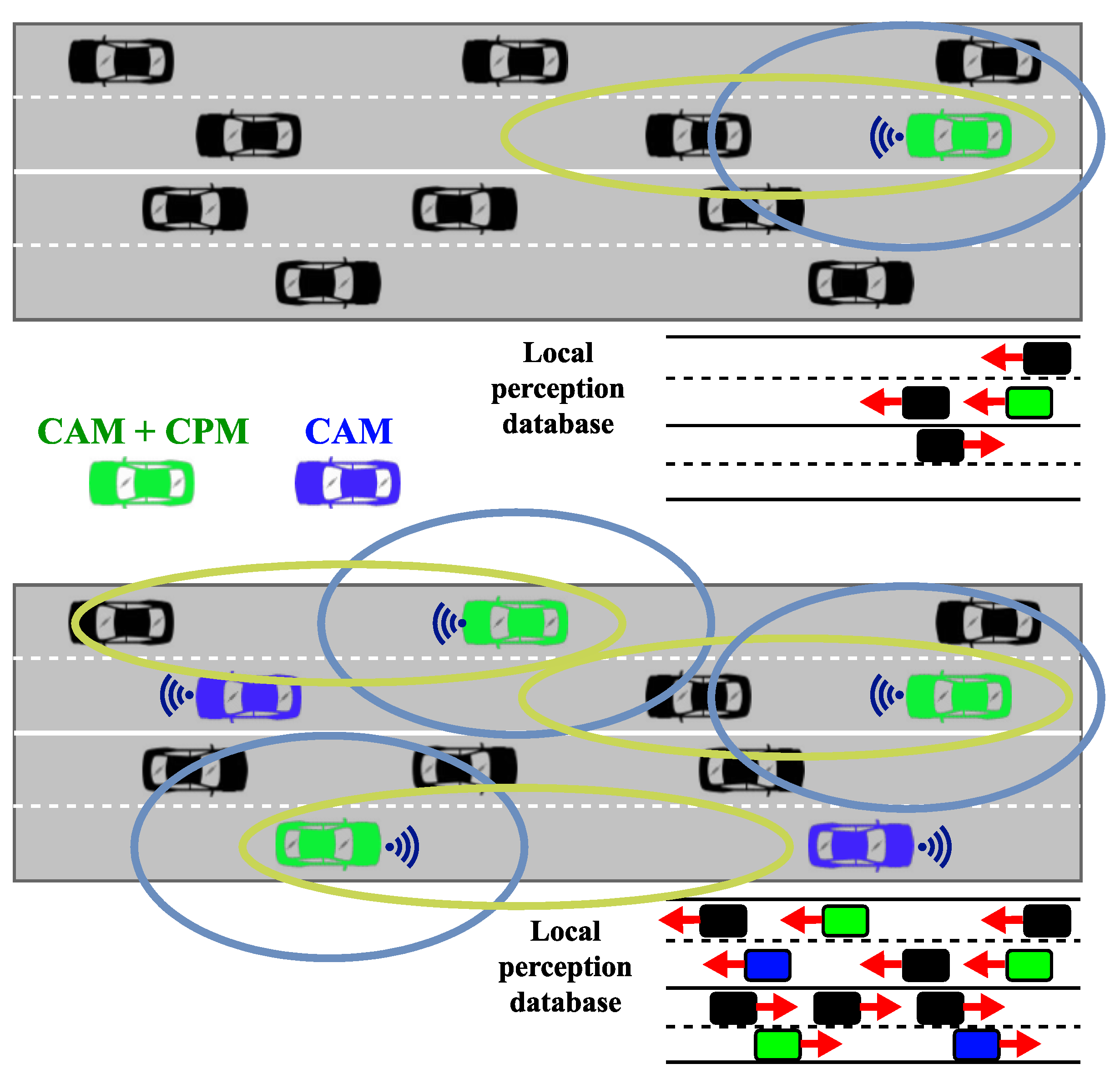
2.2. Collective Perception
2.2.1. General Idea
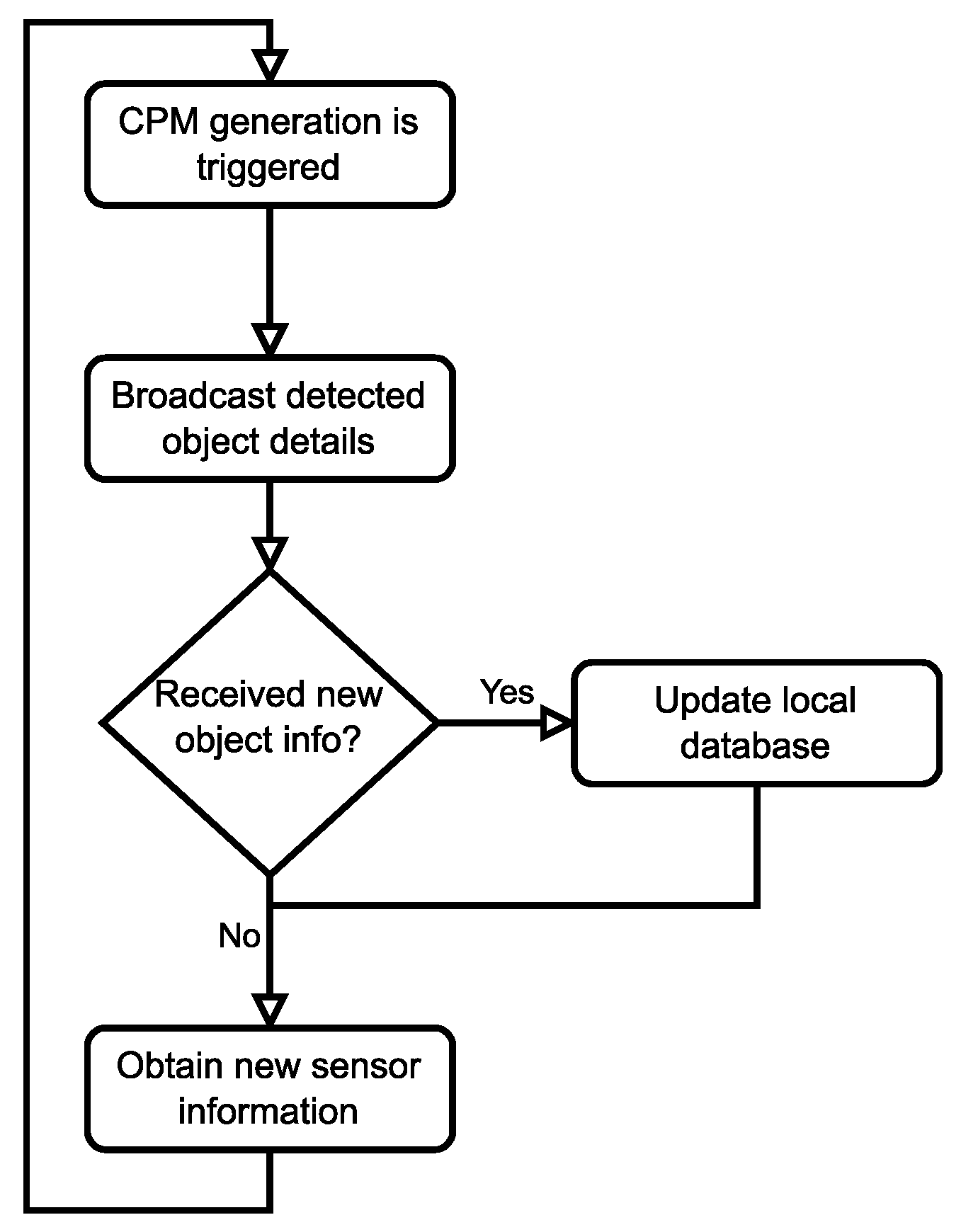
2.2.2. Technical Details
2.3. V2X Services Support in 3GPP Infrastructures
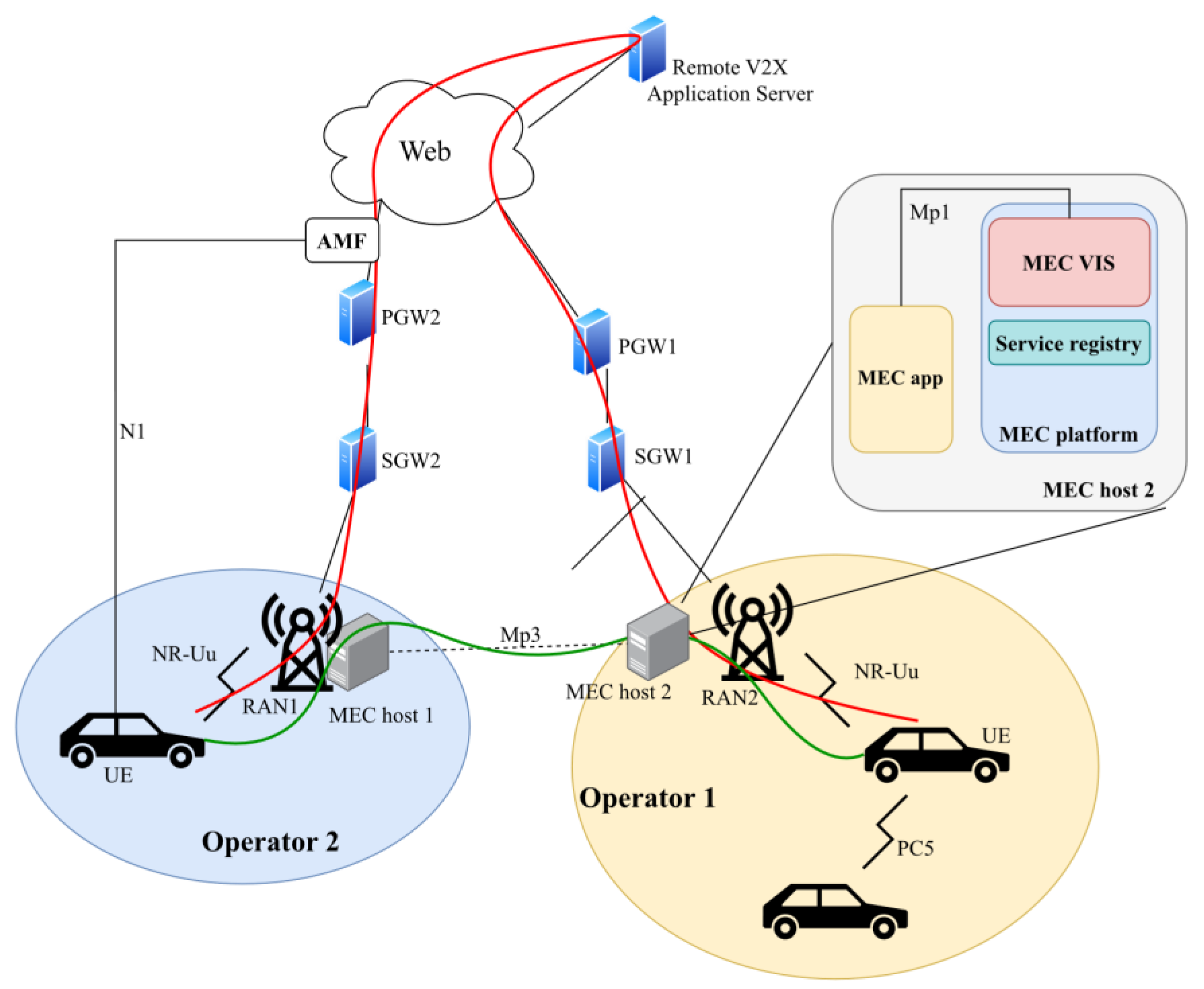
2.3.1. 5G Architecture
2.3.2. ETSI V2X Information Service
- Gathering of PC5 V2X-related information from the 3GPP network (authorized UEs, subscription info, configuration parameters);
- Exposure of this information to MEC apps;
- Enablement of secure communication between MEC apps and the logical functions in the core network;
- Enablement of secure communication between MEC apps in different MEC systems;
- Possibly gather and process information available in other MEC APIs to predict RAN congestion and notify UEs.
2.4. Collective Perception Use Cases
2.5. MEC-Assisted Use Cases
2.5.1. Extended Sensors
2.5.2. Advanced Driving
- Cooperative Collision Avoidance (CoCA)
- Information sharing for limited automated driving
- Information sharing for fully automated driving
- Emergency Trajectory Alignment (EtrA)
- Intersection Safety Information Provisioning for Urban Driving
- Cooperative lane change (CLC) of automated vehicles
- 3D video composition of V2X scenario
3. Related Works
4. Modeling and Simulation
4.1. The Used Simulation Libraries
4.1.1. Vanetza
4.1.2. Artery
4.1.3. Simu5G
4.2. The Integrated Simulation Framework
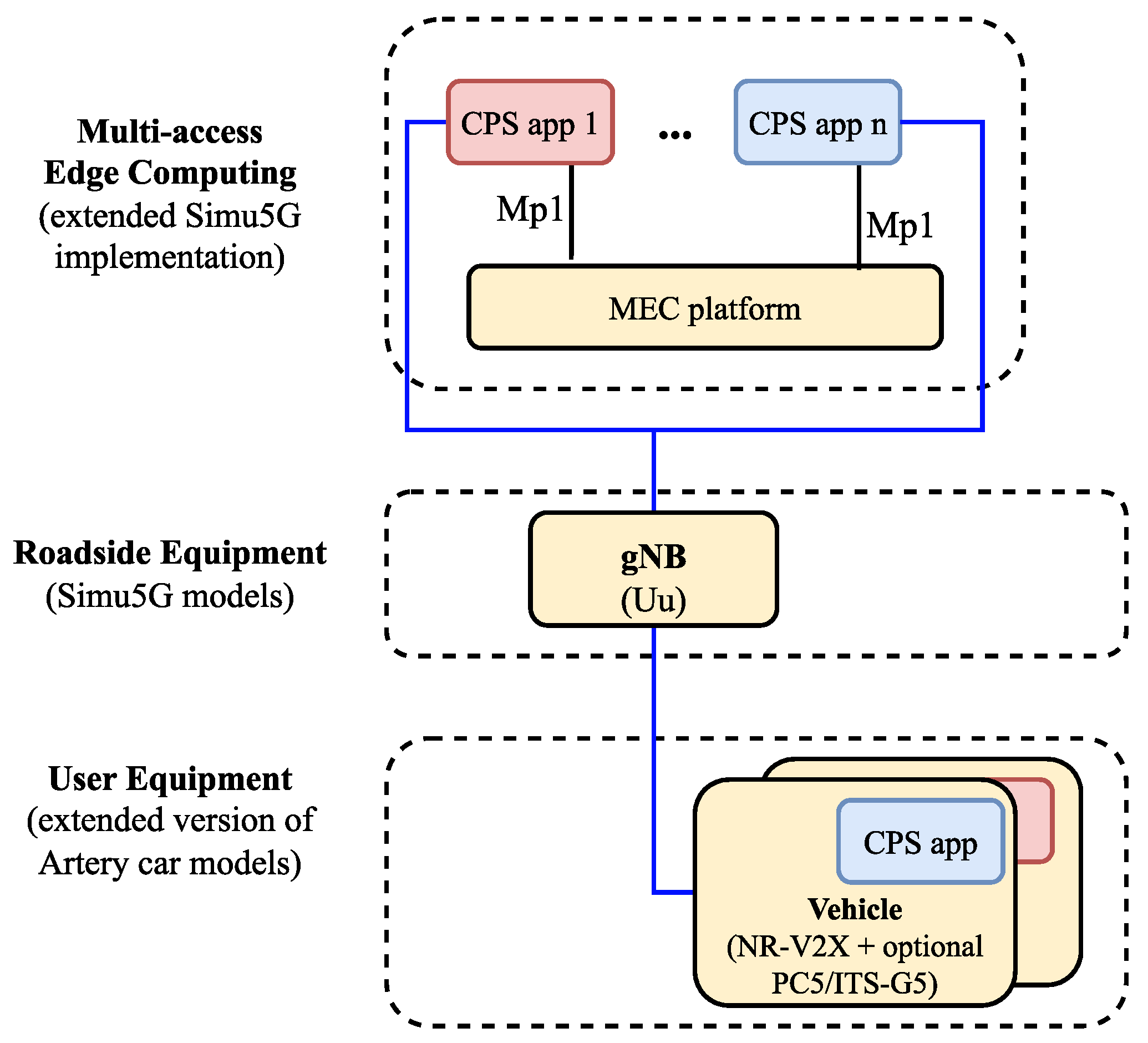
4.2.1. Integration of Artery and Simu5G
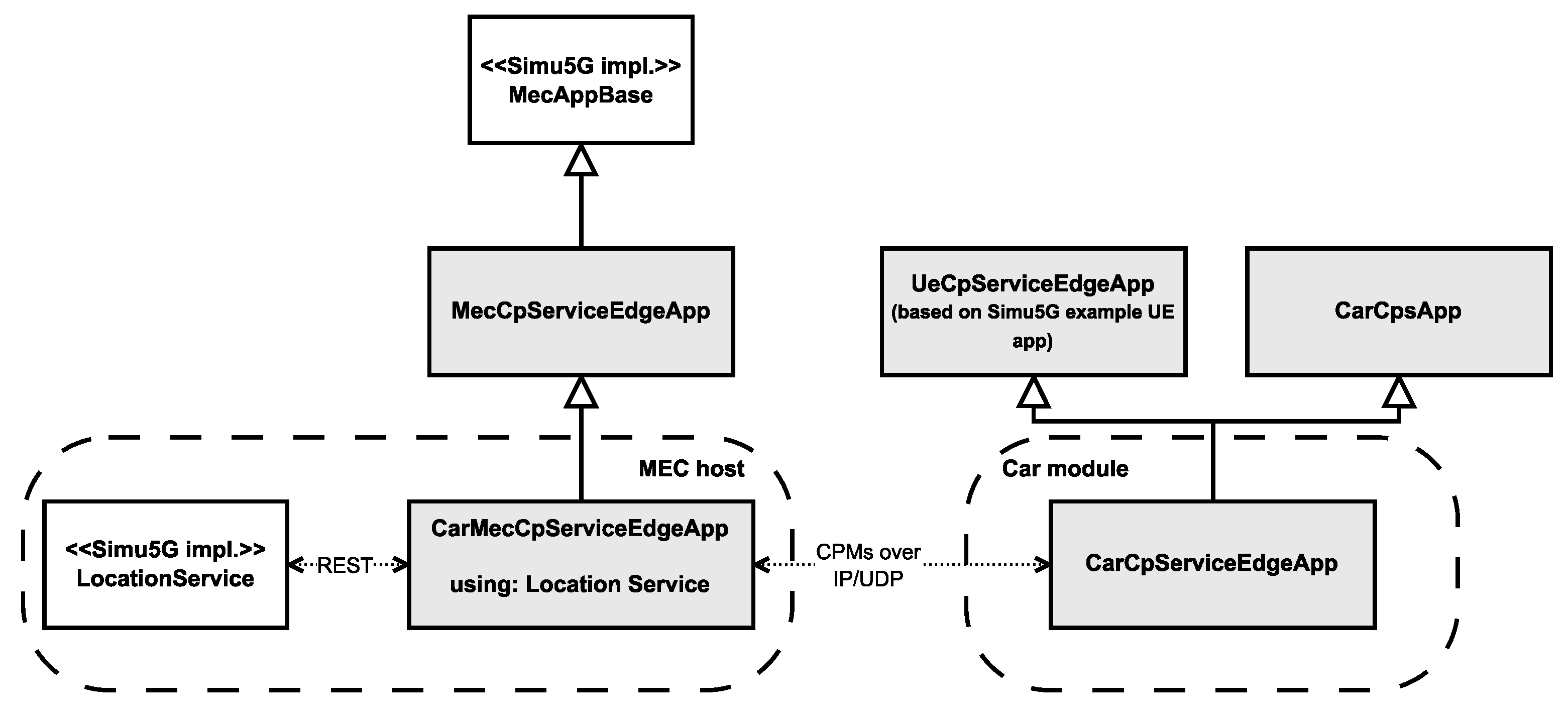
4.2.2. Our Extensions to Simu5G
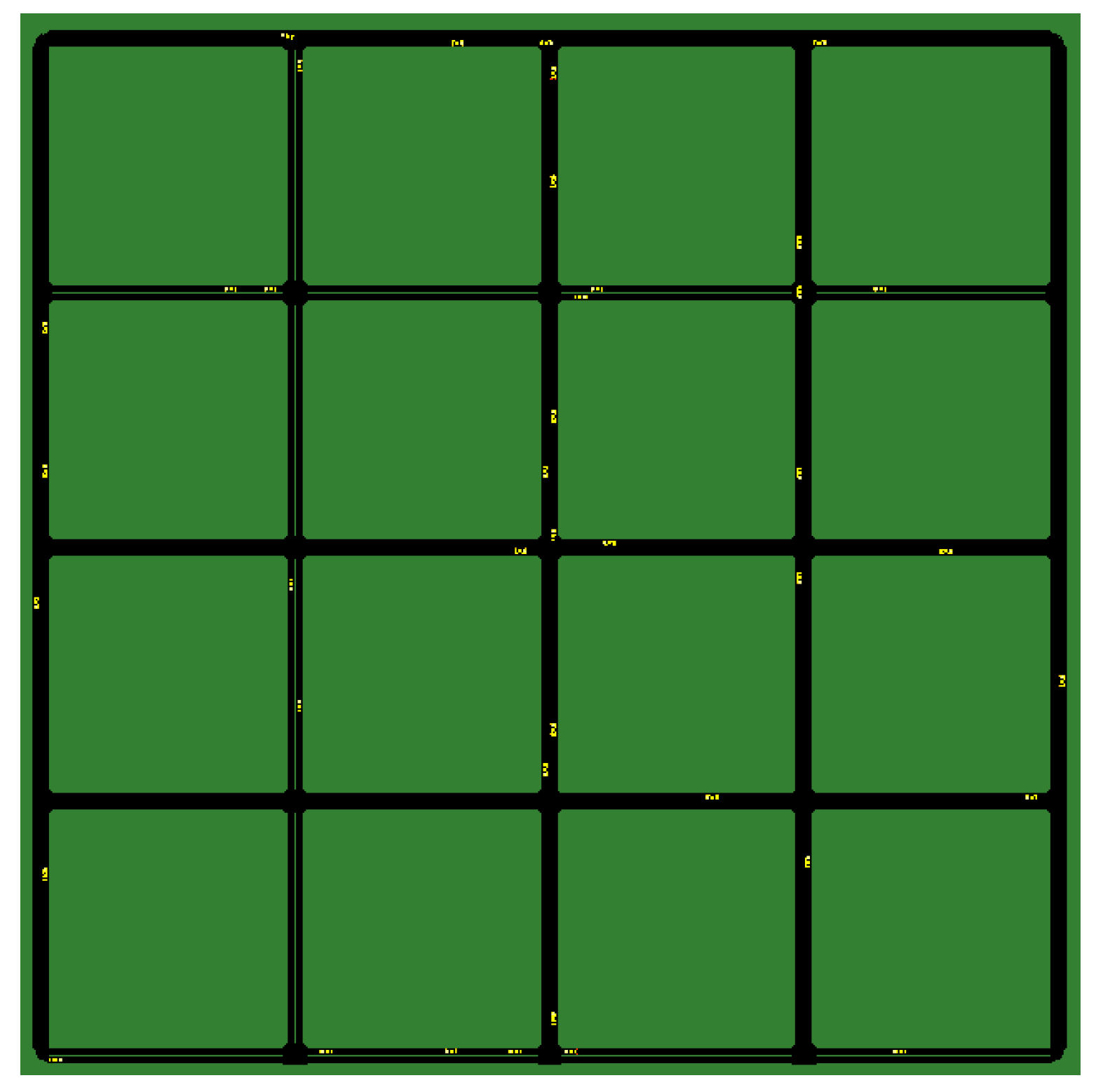
4.3. Simulation Scenarios, Parameters, and Initial Results
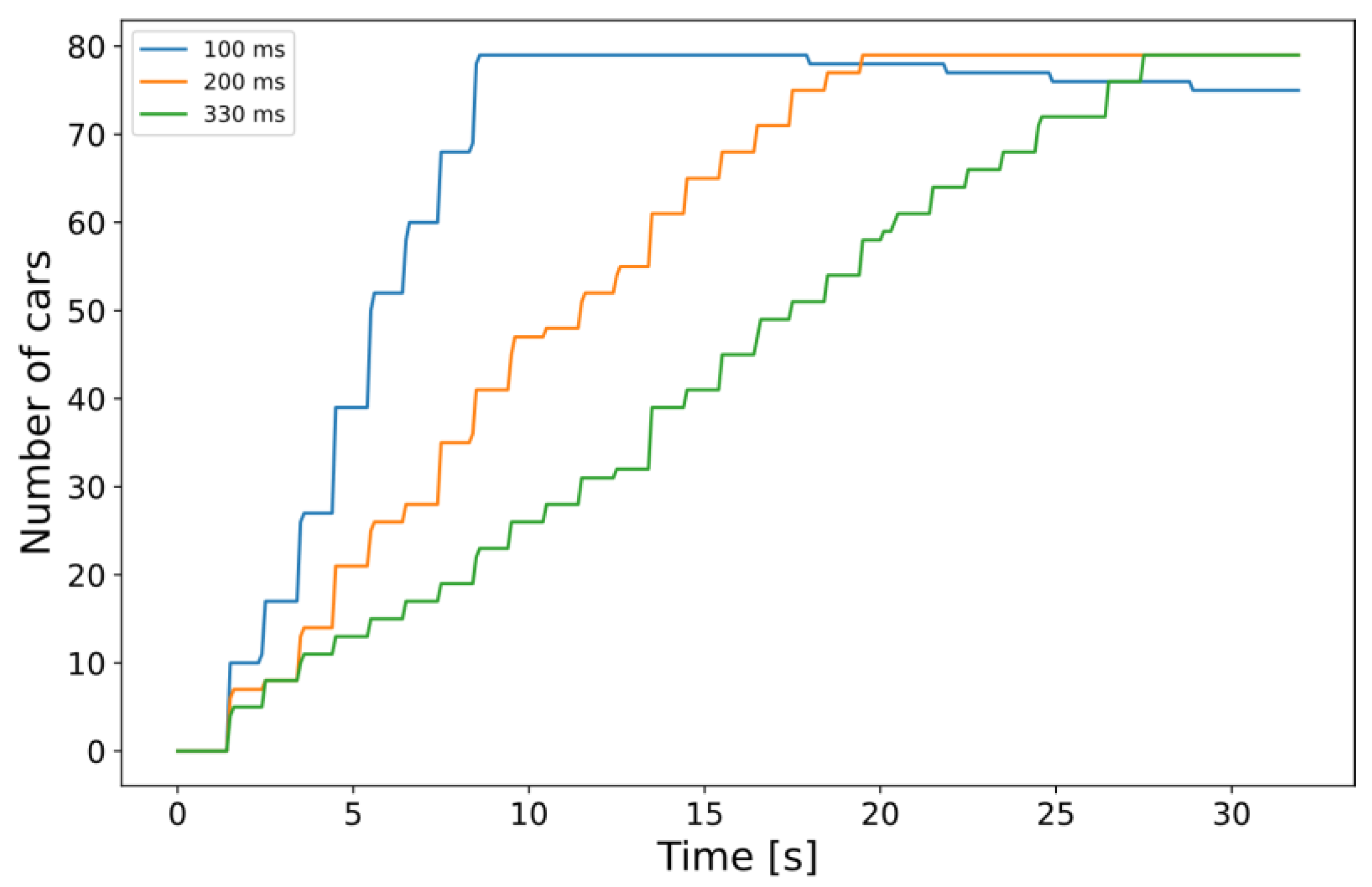
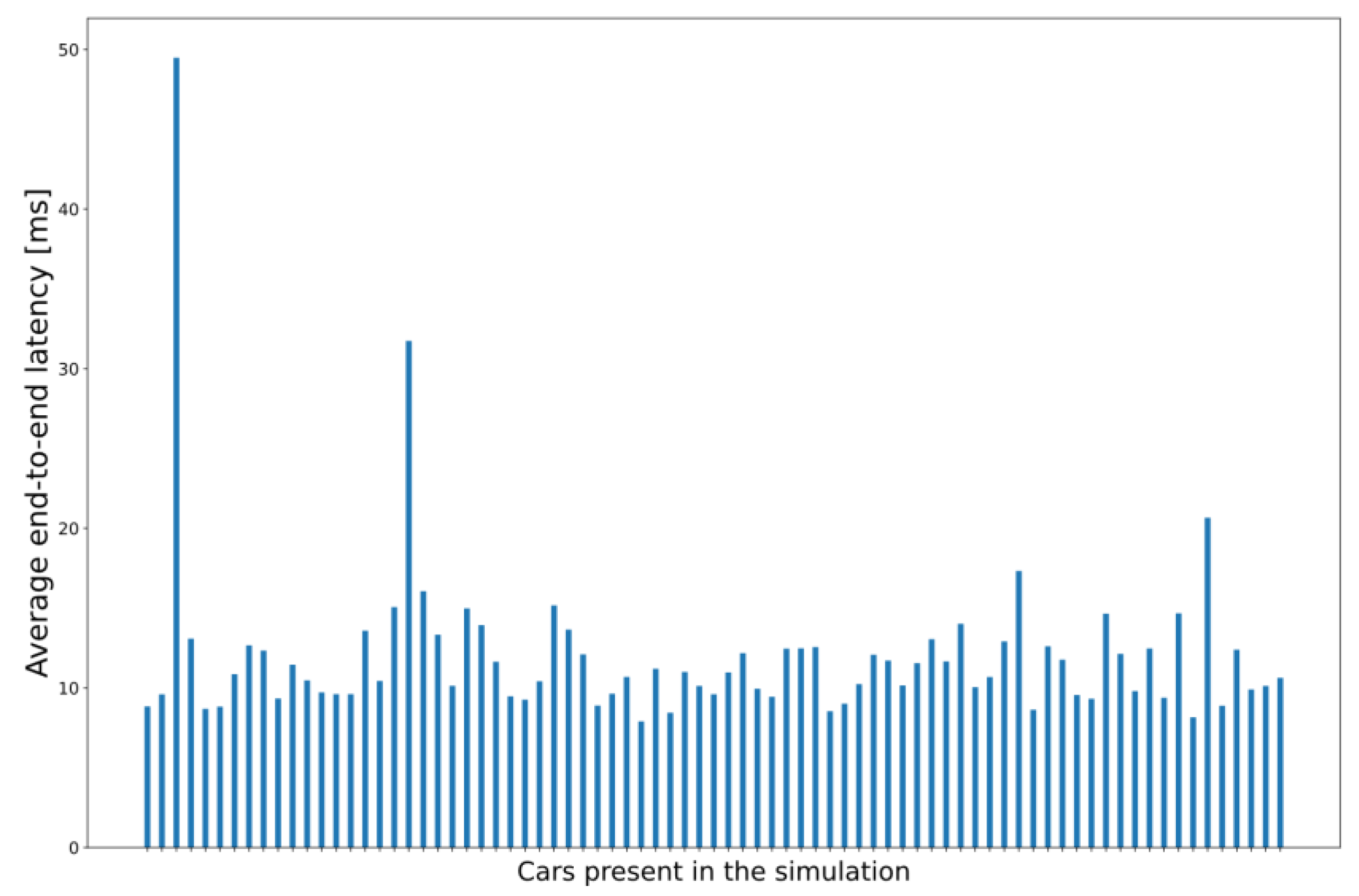
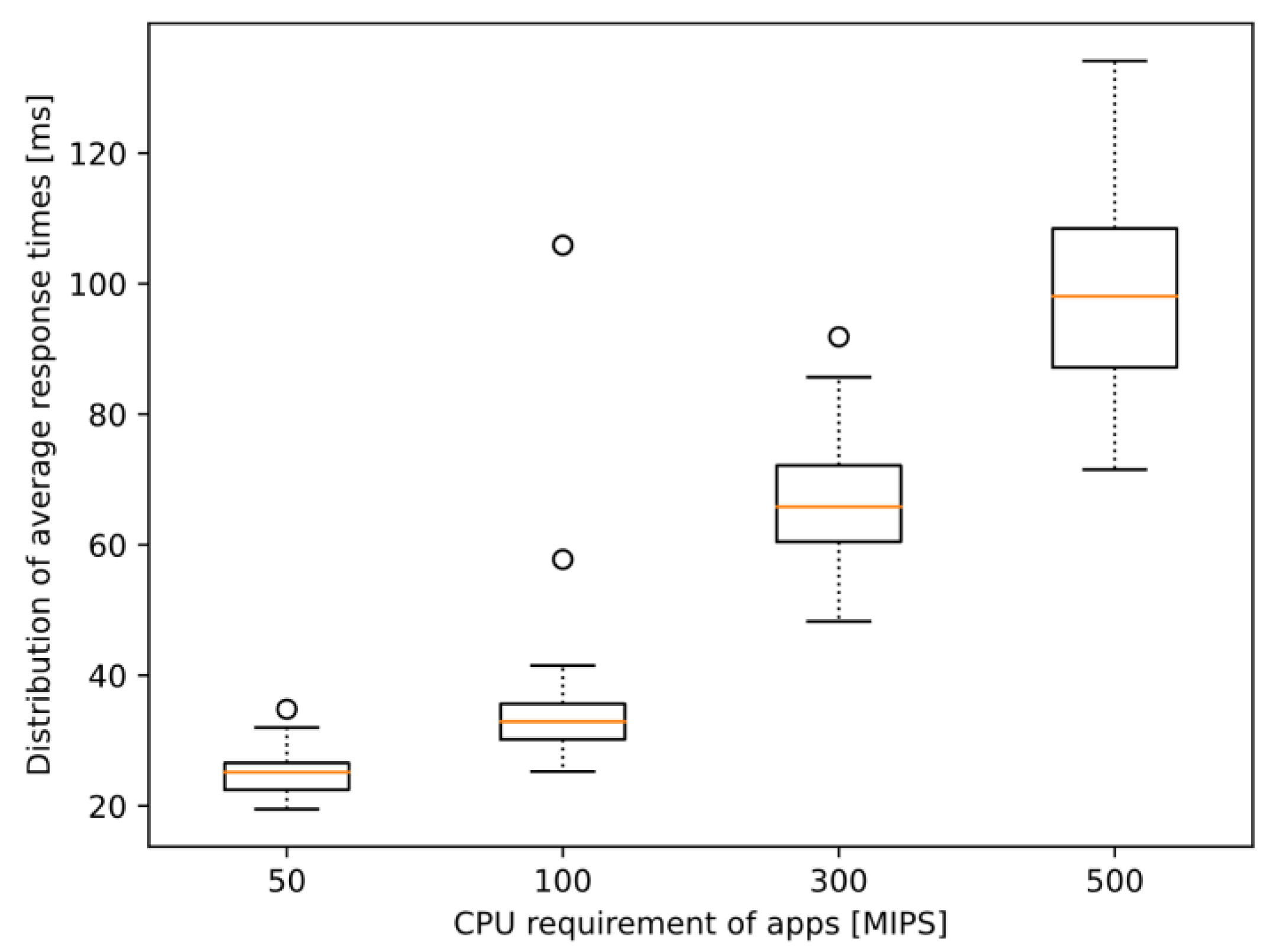
4.3.1. Simulations with Fixed CPU Requirements
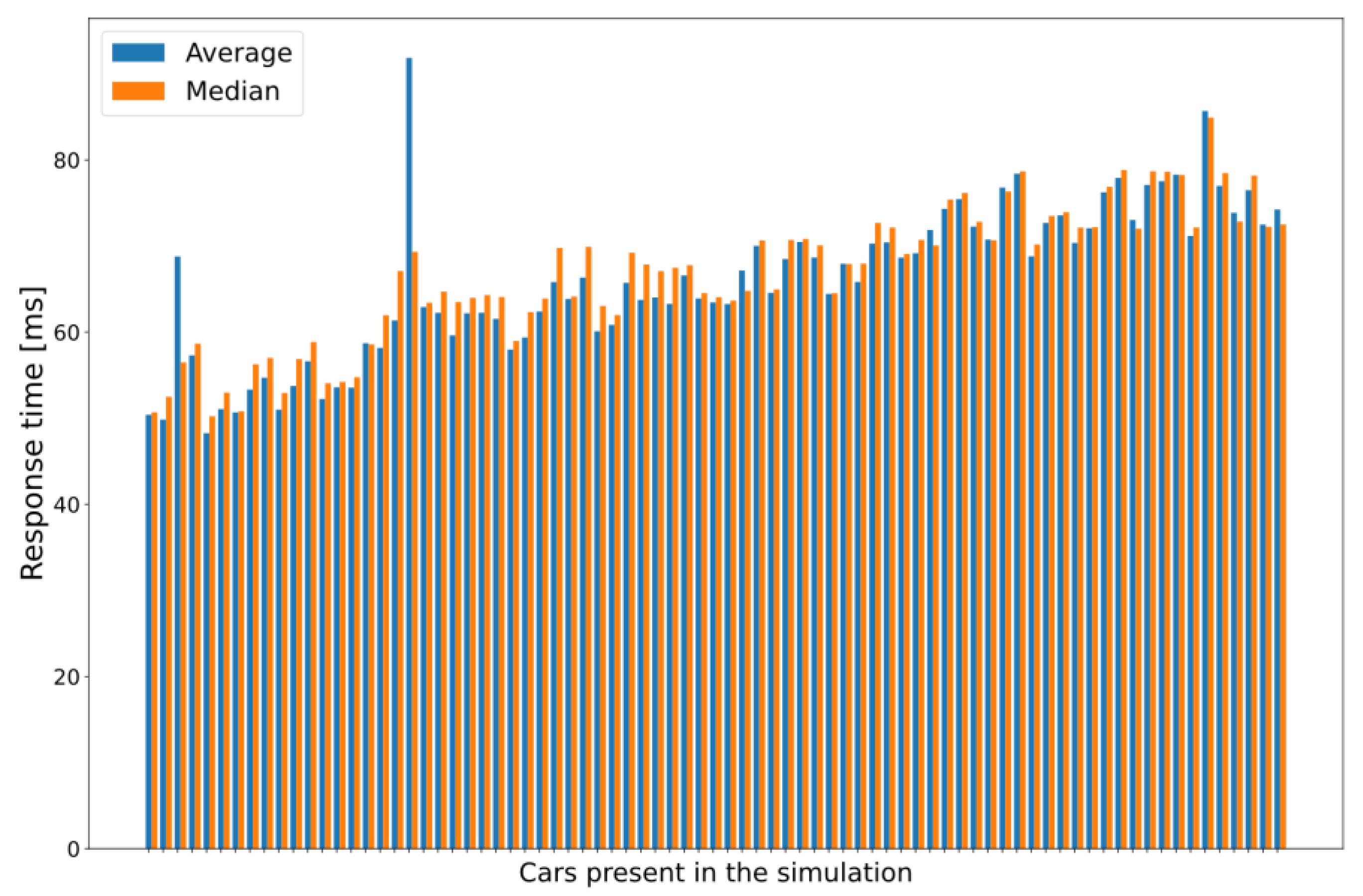
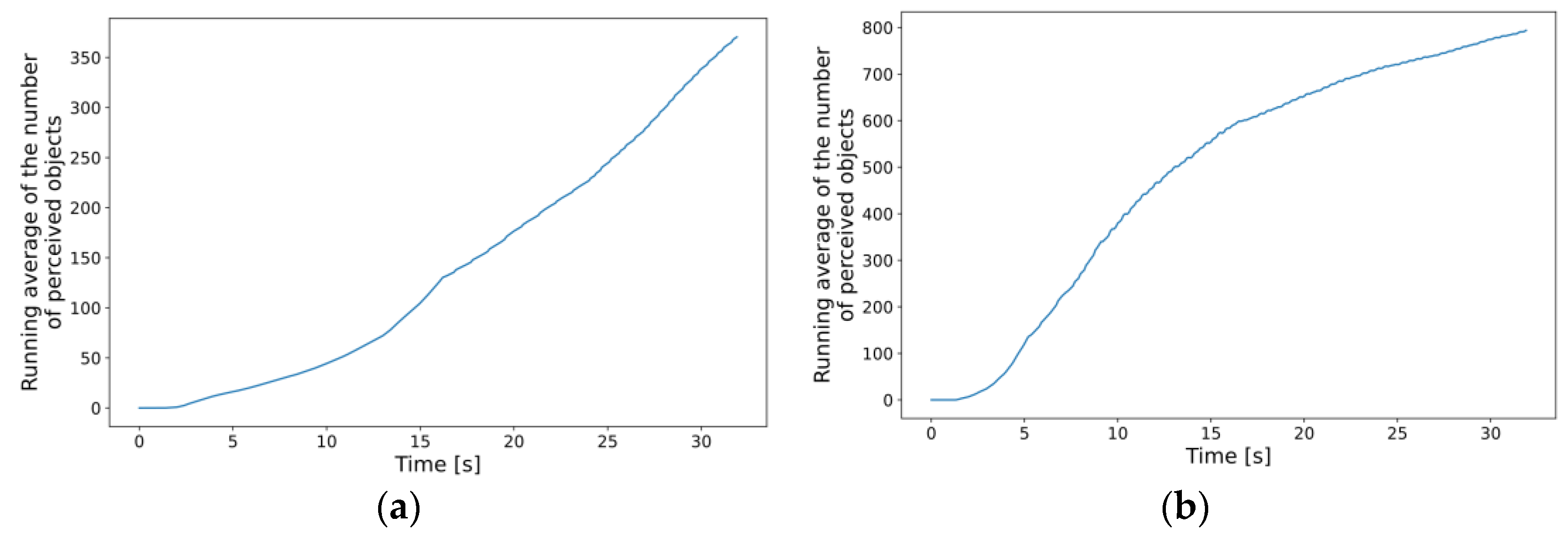
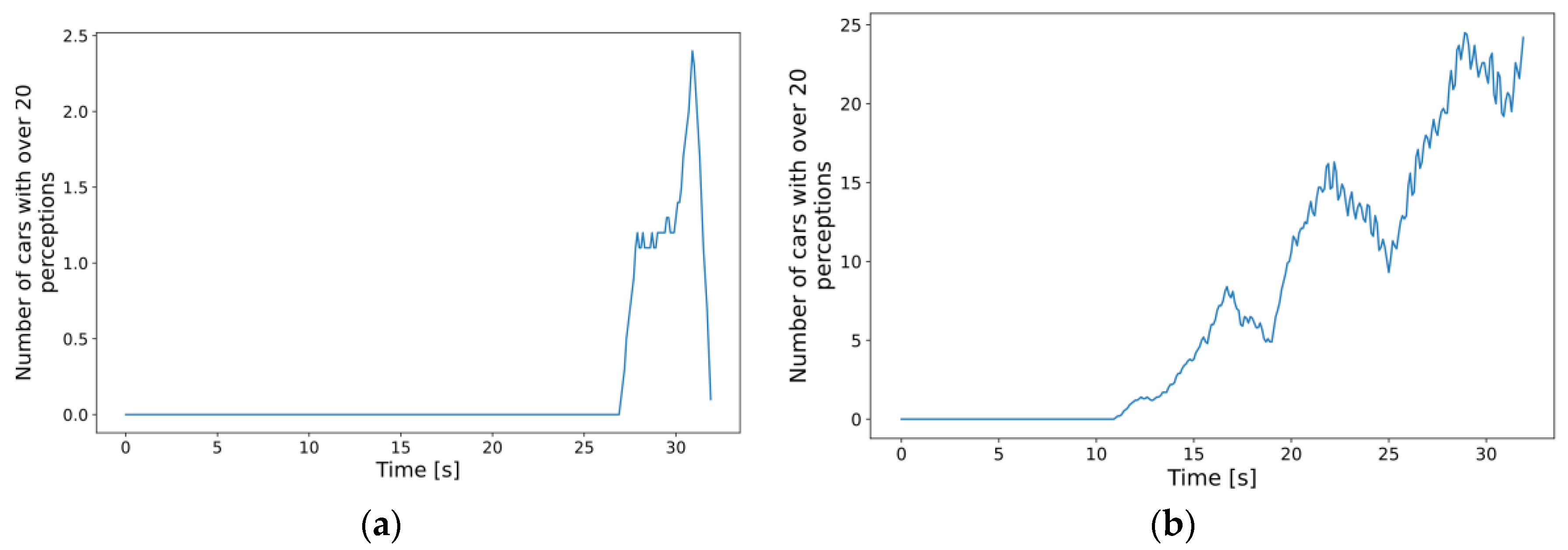
4.3.2. Simulations with Dynamic CPU Requirements
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, Y.; Wang, D.; Huang, F.; Zhang, R.; Gu, X.; Pan, J. A V2I and V2V Collaboration Framework to Support Emergency Communications in ABS-Aided Internet of Vehicles. IEEE Trans. Green Commun. Netw. 2023, 1. [Google Scholar] [CrossRef]
- Kovács, G.A. László Bokor Integrating Artery and Simu5G: A Mobile Edge Computing Use Case for Collective Perception-Based V2X Safety Applications. In Proceedings of the 2022 45th International Conference on Telecommunications and Signal Processing (TSP), Virtual, 13–15 July 2022; pp. 360–366. [Google Scholar]
- MacHardy, Z.; Khan, A.; Obana, K.; Iwashina, S. V2X Access Technologies: Regulation, Research, and Remaining Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 1858–1877. [Google Scholar] [CrossRef]
- Chen, L.; Englund, C. Cooperative ITS—EU Standards to Accelerate Cooperative Mobility. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 681–686. [Google Scholar]
- Naik, G.; Choudhury, B.; Park, J.-M. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Bazzi, A.; Masini, B.M.; Zanella, A.; Thibault, I. On the Performance of IEEE 802.11p and LTE-V2V for the Cooperative Awareness of Connected Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 10419–10432. [Google Scholar] [CrossRef]
- IEEE P802.11bd/D8.0; IEEE Approved Draft Standard for Information Technology–Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks–Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 5: Enhancements for Next Generation V2X. IEEE Standard: Piscataway, NJ, USA, 2022; pp. 1–148.
- Harounabadi, M.; Soleymani, D.M.; Bhadauria, S.; Leyh, M.; Roth-Mandutz, E. V2X in 3GPP Standardization: NR Sidelink in Release-16 and Beyond. IEEE Commun. Stand. Mag. 2021, 5, 12–21. [Google Scholar] [CrossRef]
- Jacob, R.; Anwar, W.; Schwarzenberg, N.; Franchi, N.; Fettweis, G. System-Level Performance Comparison of IEEE 802.11p and 802.11bd Draft in Highway Scenarios. In Proceedings of the 2020 27th International Conference on Telecommunications (ICT), Bali, Indonesia, 5–7 October 2020; pp. 1–6. [Google Scholar]
- Knapp, Á.; Wippelhauser, A.; Magyar, D.; Gódor, G. An Overview of Current and Future Vehicular Communication Technologies. Period. Polytech. Transp. Eng. 2020, 48, 341–348. [Google Scholar] [CrossRef]
- Moshkov, V.V.; Badin, A.D.; Guminskiy, O.A. Research of Characteristics of Radio Technologies of V2V/V2P Systems. In Proceedings of the 2022 Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Russia, 25–28 January 2022; pp. 64–68. [Google Scholar]
- Pestryakov, A.V.; Khasianova, E.R.; Dinges, S.I. Analysis of Cellular Vehicle-to-Everything Physical Layer Parameters. In Proceedings of the 2021 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 16–18 March 2021; pp. 1–4. [Google Scholar]
- Jonathan, M. Gitlin Court Rules FCC Is Allowed to Reassign 5.9 GHz Bandwidth, Killing V2X 2022. Available online: https://arstechnica.com/cars/2022/08/v2x-is-finally-dead-as-court-refuses-to-stop-fccs-5-9-ghz-reallocation/ (accessed on 10 July 2023).
- Saad, M.M.; Khan, M.T.R.; Shah, S.H.A.; Kim, D. Advancements in Vehicular Communication Technologies: C-V2X and NR-V2X Comparison. IEEE Commun. Mag. 2021, 59, 107–113. [Google Scholar] [CrossRef]
- Chen, J.; Tan, J. NR V2X: Technologies, Performance, and Standardization. In Proceedings of the 2020 54th Asilomar Conference on Signals, Systems, and Computers, Virtual, 1–5 November 2020; pp. 1012–1016. [Google Scholar]
- C2C-CC Guidance for Day 2 and Beyond Roadmap 2021. Available online: https://www.car-2-car.org/fileadmin/documents/General_Documents/C2CCC_WP_2072_RoadmapDay2AndBeyond_V1.2.pdf (accessed on 10 July 2023).
- ETSI ETSI TS 103 324 V2.1.1; Intelligent Transport System (ITS); Vehicular Communications; Basic Set of Applications; Collective Perception Service. ETSI: Sophia Antipolis, France, 2023.
- ETSI ETSI TR 103 562 V2.1.1; Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Analysis or the Collective Perception Service (CPS). ETSI: Sophia Antipolis, France, 2019.
- Ding, L.; Wang, Y.; Wu, P.; Li, L.; Zhang, J. Kinematic Information Aided User-Centric 5G Vehicular Networks in Support of Cooperative Perception for Automated Driving. IEEE Access 2019, 7, 40195–40209. [Google Scholar] [CrossRef]
- ETSI ETSI TS 103 696 V2.1.1; Intelligent Transport Systems (ITS); Communication Architecture for Multi-Channel Operation (MCO). ETSI: Sophia Antipolis, France, 2021.
- ETSI ETSI TS 123 287 V16.4.0; 5G; Architecture Enhancements for 5G System (5GS) to Support Vehicle-to-Everything (V2X) Services (3GPP TS 23.287 Version 16.4.0 Release 16). ETSI: Sophia Antipolis, France, 2020.
- Mao, Y.; You, C.; Zhang, J.; Huang, K.; Letaief, K.B. A Survey on Mobile Edge Computing: The Communication Perspective. IEEE Commun. Surv. Tutor. 2017, 19, 2322–2358. [Google Scholar] [CrossRef]
- ETSI ETSI GS MEC 003 V3.1.1; Multi-Access Edge Computing (MEC); Framework and Reference Architecture. ETSI: Sophia Antipolis, France, 2022.
- Shah, S.A.A.; Ahmed, E.; Imran, M.; Zeadally, S. 5G for Vehicular Communications. IEEE Commun. Mag. 2018, 56, 111–117. [Google Scholar] [CrossRef]
- Giust, F.; Sciancalepore, V.; Sabella, D.; Filippou, M.C.; Mangiante, S.; Featherstone, W.; Munaretto, D. Multi-Access Edge Computing: The Driver Behind the Wheel of 5G-Connected Cars. IEEE Commun. Stand. Mag. 2018, 2, 66–73. [Google Scholar] [CrossRef]
- ETSI. ETSI Harmonizing Standards for Edge Computing—A Synergized Architecture Leveraging ETSI ISG MEC and 3GPP Specifications; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- ETSI ETSI GS MEC 030 V3.1.1; Multi-Access Edge Computing (MEC); V2X Information Service API. ETSI: Sophia Antipolis, France, 2023.
- ETSI ETSI TR 103 300-1 V2.2.1; Intelligent Transport Systems (ITS); Vulnerable Road Users (VRU) Awareness; Part 1: Use Cases Definition. ETSI: Sophia Antipolis, France, 2021.
- ETSI ETSI TS 103 300-3 V2.1.1; Intelligent Transport Systems (ITS); Vulnerable Road Users (VRU) Awareness; Part 3: Specification of VRU Awareness Basic Service. ETSI: Sophia Antipolis, France, 2020.
- Miucic, R.; Sheikh, A.; Medenica, Z.; Kunde, R. V2X Applications Using Collaborative Perception. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar]
- Alalewi, A.; Dayoub, I.; Cherkaoui, S. On 5G-V2X Use Cases and Enabling Technologies: A Comprehensive Survey. IEEE Access 2021, 9, 107710–107737. [Google Scholar] [CrossRef]
- Ma, H.; Li, S.; Zhang, E.; Lv, Z.; Hu, J.; Wei, X. Cooperative Autonomous Driving Oriented MEC-Aided 5G-V2X: Prototype System Design, Field Tests and AI-Based Optimization Tools. IEEE Access 2020, 8, 54288–54302. [Google Scholar] [CrossRef]
- 3GPP Technical Specification Group Services and System Aspects; Study on Enhancement of 3GPP Support for 5G V2X Services (Release16). 2018. Available online: https://www.3gpp.org/dynareport/22886.htm (accessed on 10 July 2023).
- Fayad, F.; Cherfaoui, V. Object-Level Fusion and Confidence Management in a Multi-Sensor Pedestrian Tracking System. In Multisensor Fusion and Integration for Intelligent Systems: An Edition of the Selected Papers from the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems 2008; Hahn, H., Ko, H., Lee, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 15–31. ISBN 978-3-540-89859-7. [Google Scholar]
- Aeberhard, M. Object-Level Fusion for Surround Environment Perception in Automated Driving Applications; Technische Universität Dortmund: Dortmund, Germany, 2017. [Google Scholar]
- Universidade de Brasilía. Ícaro Pires de Souza Aragão a Software Solution for Preprocessing Objects in Object-Level Multisensor Fusion for Self-Driving Vehicles Perception; Universidade de Brasilía—UnB: Brasília, Brazil, 2021. [Google Scholar]
- Zhang, X.; Zhang, A.; Sun, J.; Zhu, X.; Guo, Y.E.; Qian, F.; Mao, Z.M. EMP: Edge-Assisted Multi-Vehicle Perception. In Proceedings of the 27th Annual International Conference on Mobile Computing and Networking, New York City, NY, USA, 3–7 October 2016; Association for Computing Machinery: New York, NY, USA, 2021; pp. 545–558. [Google Scholar]
- Feng, L.; Li, W.; Lin, Y.; Zhu, L.; Guo, S.; Zhen, Z. Joint Computation Offloading and URLLC Resource Allocation for Collaborative MEC Assisted Cellular-V2X Networks. IEEE Access 2020, 8, 24914–24926. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, J.; Ge, Y.; Yu, B.; Li, C.; Li, L. MEC Support for C-V2X System Architecture. In Proceedings of the 2019 IEEE 19th International Conference on Communication Technology (ICCT), Xi’an, China, 16–19 October 2019; pp. 1375–1379. [Google Scholar]
- ETSI ETSI GS MEC 003 V2.1.1; Multi-Access Edge Computing (MEC); Framework and Reference Architecture. ETSI: Sophia Antipolis, France, 2019.
- Shaer, I.; Haque, A.; Shami, A. Multi-Component V2X Applications Placement in Edge Computing Environment. In Proceedings of the ICC 2020–2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Sonmez, C.; Ozgovde, A.; Ersoy, C. EdgeCloudSim: An Environment for Performance Evaluation of Edge Computing Systems. In Proceedings of the 2017 Second International Conference on Fog and Mobile Edge Computing (FMEC), Valencia, Spain, 8–11 May 2017; pp. 39–44. [Google Scholar]
- Calheiros, R.N.; Ranjan, R.; Beloglazov, A.; De Rose, C.A.F.; Buyya, R. CloudSim: A Toolkit for Modeling and Simulation of Cloud Computing Environments and Evaluation of Resource Provisioning Algorithms. Softw. Pract. Exper. 2011, 41, 23–50. [Google Scholar] [CrossRef]
- Emara, M.; Filippou, M.C.; Sabella, D. MEC-Assisted End-to-End Latency Evaluations for C-V2X Communications. In Proceedings of the 2018 European Conference on Networks and Communications (EuCNC), Ljubljana, Slovenia, 18–21 June 2018; pp. 1–9. [Google Scholar]
- Foukas, X.; Nikaein, N.; Kassem, M.M.; Marina, M.K.; Kontovasilis, K. FlexRAN: A Flexible and Programmable Platform for Software-Defined Radio Access Networks. In Proceedings of the 12th International on Conference on Emerging Networking EXperiments and Technologies, Irvine, CA, USA, 12–15 December 2006; Association for Computing Machinery: New York, NY, USA, 2016; pp. 427–441. [Google Scholar]
- Nardini, G.; Stea, G.; Virdis, A.; Sabella, D.; Thakkar, P. Using Simu5G as a Realtime Network Emulator to Test MEC Apps in an End-To-End 5G Testbed. In Proceedings of the 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications, London, UK, 31 August–3 September 2020; pp. 1–7. [Google Scholar]
- Virdis, A.; Nardini, G.; Stea, G.; Sabella, D. End-to-End Performance Evaluation of MEC Deployments in 5G Scenarios. J. Sens. Actuator Netw. 2020, 9, 57. [Google Scholar] [CrossRef]
- Massari, S.; Mirizzi, N.; Piro, G.; Boggia, G. An Open-Source Tool Modeling the ETSI-MEC Architecture in the Industry 4.0 Context. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Puglia, Italy, 22–25 June 2021; pp. 226–231. [Google Scholar]
- Henderson, T.R.; Lacage, M.; Riley, G.F.; Dowell, C.; Kopena, J. Network Simulations with the Ns-3 Simulator. SIGCOMM Demonstr. 2008, 14, 527. [Google Scholar]
- Li, Z.; Xie, T.; He, G. MEC-Sim: An Extensible Simulator for Mobile Edge Computing System. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 6729–6735. [Google Scholar]
- Passas, V.; Makris, N.; Nanis, C.; Korakis, T. V2MEC: Low-Latency MEC for Vehicular Networks in 5G Disaggregated Architectures. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Nikaein, N.; Marina, M.K.; Manickam, S.; Dawson, A.; Knopp, R.; Bonnet, C. OpenAirInterface: A Flexible Platform for 5G Research. SIGCOMM Comput. Commun. Rev. 2014, 44, 33–38. [Google Scholar] [CrossRef]
- Shi, Y.; Peng, Z.; Bian, Z. End-to-End Behavior Simulation for Multi-Access Edge Computing. In Proceedings of the 2021 IEEE Asia Conference on Information Engineering (ACIE), Sanya, China, 29–31 January 2021; pp. 65–72. [Google Scholar]
- Rupp, M.; Wischhof, L. Prioritization for Latency Reduction in 5G MEC-Based VRU Protection Systems. In Proceedings of the 2022 18th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Thessaloniki, Greece, 10–12 October 2022; pp. 172–177. [Google Scholar]
- Schuhbäck, S.; Wischhof, L.; Ott, J. Cellular Sidelink Enabled Decentralized Pedestrian Sensing. IEEE Access 2023, 11, 13349–13369. [Google Scholar] [CrossRef]
- Noferi, A.; Nardini, G.; Stea, G.; Virdis, A. Rapid Prototyping and Performance Evaluation of ETSI MEC-Based Applications. Simul. Model. Pract. Theory 2023, 123, 102700. [Google Scholar] [CrossRef]
- Herbert, M.; Váradi, A.; Bokor, L. Modelling and Examination of Collective Perception Service for V2X Supported Autonomous Driving. In Proceedings of the 11th International Conference on Applied Informatics (ICAI 2020), Eger, Hungary, 29 January 2020; Volume 2650, pp. 138–149. [Google Scholar]
- Riebl, R.; Obermaier, C.; Neumeier, S.; Facchi, C. Christian Facchi Vanetza: Boosting Research on Inter-Vehicle Communication. In Proceedings of the 5th GI/ITG KuVS Fachgespräch Inter-Vehicle Communication, Friedrich-Alexander-Universität, Erlangen-Nürnberg, Germany, 6 April 2017; pp. 37–40. [Google Scholar]
- Riebl, R.; Obermaier, C.; Günther, H.-J. Artery: Large Scale Simulation Environment for ITS Applications. In Recent Advances in Network Simulation: The OMNeT++ Environment and Its Ecosystem; Springer: Berlin/Heidelberg, Germany, 2019; pp. 365–406. ISBN 978-3-030-12841-8. [Google Scholar]
- Riebl, R.; Günther, H.-J.; Facchi, C.; Wolf, L. Artery: Extending Veins for VANET Applications. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 450–456. [Google Scholar]
- INET Framework. Available online: https://inet.omnetpp.org/Introduction.html (accessed on 10 July 2023).
- Nardini, G.; Sabella, D.; Stea, G.; Thakkar, P.; Virdis, A. Simu5G–An OMNeT++ Library for End-to-End Performance Evaluation of 5G Networks. IEEE Access 2020, 8, 181176–181191. [Google Scholar] [CrossRef]
- GitHub—Simu5G. Available online: https://github.com/Unipisa/Simu5G (accessed on 10 July 2023).
- Riebl, R.; Facchi, C. Regain Control of Growing Dependencies in OMNeT++ Simulations. In Proceedings of the “OMNeT++ Community Summit 2015, Zurich, Switzerland, 3–4 September 2015. [Google Scholar]
- ETSI ETSI GS MEC 013 V3.1.1; Multi-Access Edge Computing (MEC); Location API. ETSI: Sophia Antipolis, France, 2023.
- Kovács, G.; Bokor, L. Towards Realistic Simulation of MEC-Based Collective Perception: An Initial Edge Service Design for the Artery/Simu5G Framework. In Proceedings of the 1st Workshop on Intelligent Infocommunication Networks, Systems and Services; BME-VIK, Budapest, Hungary, 7 February 2023. [Google Scholar]
- ETSI EN 302 636-4-1 V1.3.1; Intelligent Transport Systems (ITS); Vehicular Communications; GeoNetworking; Part 4: Geographical Addressing and Forwarding for Point-to-Point and Point-to-Multipoint Communications; Sub-Part 1: Media-Independent Functionality. ETSI: Sophia Antipolis, France, 2017.
- Sehla, K.; Nguyen, T.M.T.; Pujolle, G.; Velloso, P.B. Resource Allocation Modes in C-V2X: From LTE-V2X to 5G-V2X. IEEE Internet Things J. 2022, 9, 8291–8314. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | 802.11p | 802.11bd | (LTE) C-V2X | 5G NR-V2X | ||
|---|---|---|---|---|---|---|
| Short range (PC5 sidelink) | Long range (Uu) | Short range (PC5 sidelink) | Long range (Uu) | |||
| Modulation and coding scheme (MCS) | QPSK with BCC | BPSK up to 64-QAM with LDPC | QPSK to 64-QAM with turbo codes | up to 64-QAM with LDPC codes | ||
| Doppler shift resistance methods | Preamble only | Preambles & Midambles | DMRS, 4/subframe | flexible DMRS | ||
| Carrier frequency [GHz] | 5.9 | 5.9 | 5.9 | 0.7, 0.8 | 5.9, 60 (mmWave) | available 5G bands |
| Sub-carrier spacing [kHz] | 156.25 | 78.125, 156.25, 312.5 | 15 | sub 6-GHz: 15, 30, 60 | ||
| mmWave: 60, 120 | N/A | |||||
| PHY layer (waveform) | OFDM | OFDM | SC-FDMA | OFDM/DFTsOFDM | ||
| Number of MCS | 8 | 10 | more than 20 | more than 20 | ||
| Spatial streams | one | multiple | multiple | multiple | ||
| Bandwidth [MHz] | 10 | 10/20 | Flexible: 1.4/5/20/20 | sub 6-GHz: max. 100 | ||
| mmWave: max. 400 | N/A | |||||
| Re-transmission | none | Congestion dependent | Blind | HARQ | ||
| Communication types | broadcast | broadcast | broadcast | unicast | broadcast, groupcast, unicast | unicast |
| (Theoretical) transmission range [km] | about 1 | about 1 | 2 | up to 10 | 2 | up to 10 |
| Relative speeds [km/h] | 252 | 500 | 500 | 500 | ||
| Research Effort | Year | Applied Framework | Contribution | Evaluation Target | Radio Technology |
|---|---|---|---|---|---|
| Sonmez et al. [43] | 2017 | CloudSim [44] | Model implementation | Edge computing simulator tool: EdgeCloudSim | n/a |
| Emara et al. [45] | 2018 | FlexRAN [46]/ OpenAirInterface | Model implementation and evaluation | End-to-end latency of MEC-assisted CAM service | LTE-Uu |
| Nardini et al. [47] | 2020 | Simu5G, Intel OpenNESS | Model proposal and evaluation | Capabilities of the MEC emulator | LTE/NR-Uu |
| Virdis et al. [48] | 2020 | Simu5G, Intel CoFluent | Model implementation and evaluation | End-to-end latency of different system deployments | LTE/NR-Uu |
| Massari et al. [49] | 2021 | NS-3 [50], 5G air simulator | Model implementation and evaluation | MEC simulator for Industry 4.0 scenarios | NR-Uu |
| Li et al. [51] | 2021 | MEC-Sim | Model implementation and evaluation | Evaluation of a proprietary MEC simulator solution | n/a |
| Passas et al. [52] | 2021 | OpenAirInterface [53] | Model implementation and evaluation | MEC service placement | LTE-Uu, Wi-Fi |
| Shi et al. [54] | 2021 | Intel CoFluent, SUMO | Model implementation and evaluation | End-to-end co-simulation framework | Simplified LTE |
| Rupp, Wischhof. [55] | 2022 | OMNeT++/ Simu5G | Service proposal and evaluation | Message prioritization strategy | NR-Uu |
| Schuhbäck et al. [56] | 2023 | CrowNet (OMNet+/Simu5G) | Model implementation and evaluation | Decentralized mobile crowd sensing strategy | LTE/NR Uu/PC5, DSRC, Wi-Fi |
| Noferi et al. [57] | 2023 | Simu5G | Model implementation and evaluation | MEC prototype, simulation framework | LTE/NR-Uu |
| Kovacs, Bokor [this article] | 2023 | Artery/Simu5G | Model implementation and evaluation | V2X stack simulator enhanced with 5G + MEC simulator implementation and CP service integration | LTE/NR Uu/PC5 (user plane), DSRC, Wi-Fi |
| MEC Host Capability [MIPS] | MEC App CPU Requirement [MIPS] | Average End-to-End Latency [ms] | Average Response Time [ms] |
|---|---|---|---|
| 400,000 | 50 | 11.4 | 25.0 |
| 400,000 | 100 | 12.5 | 34.1 |
| 400,000 | 300 | 12.0 | 66.0 |
| 400,000 | 500 | 11.8 | 97.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovács, G.A.; Bokor, L. Implementation of MEC-Assisted Collective Perception in an Integrated Artery/Simu5G Simulation Framework. Sensors 2023, 23, 7968. https://doi.org/10.3390/s23187968
Kovács GA, Bokor L. Implementation of MEC-Assisted Collective Perception in an Integrated Artery/Simu5G Simulation Framework. Sensors. 2023; 23(18):7968. https://doi.org/10.3390/s23187968
Chicago/Turabian StyleKovács, Gergely Attila, and László Bokor. 2023. "Implementation of MEC-Assisted Collective Perception in an Integrated Artery/Simu5G Simulation Framework" Sensors 23, no. 18: 7968. https://doi.org/10.3390/s23187968
APA StyleKovács, G. A., & Bokor, L. (2023). Implementation of MEC-Assisted Collective Perception in an Integrated Artery/Simu5G Simulation Framework. Sensors, 23(18), 7968. https://doi.org/10.3390/s23187968