
A Sub-Aperture Overlapping Imaging Method for Circular Synthetic Aperture Radar Carried by a Small Rotor Unmanned Aerial Vehicle


Abstract
:1. Introduction
2. CSAR 2D Imaging Method Based on Sub-Aperture
2.1. Geometry of CSAR
2.2. BP Algorithm
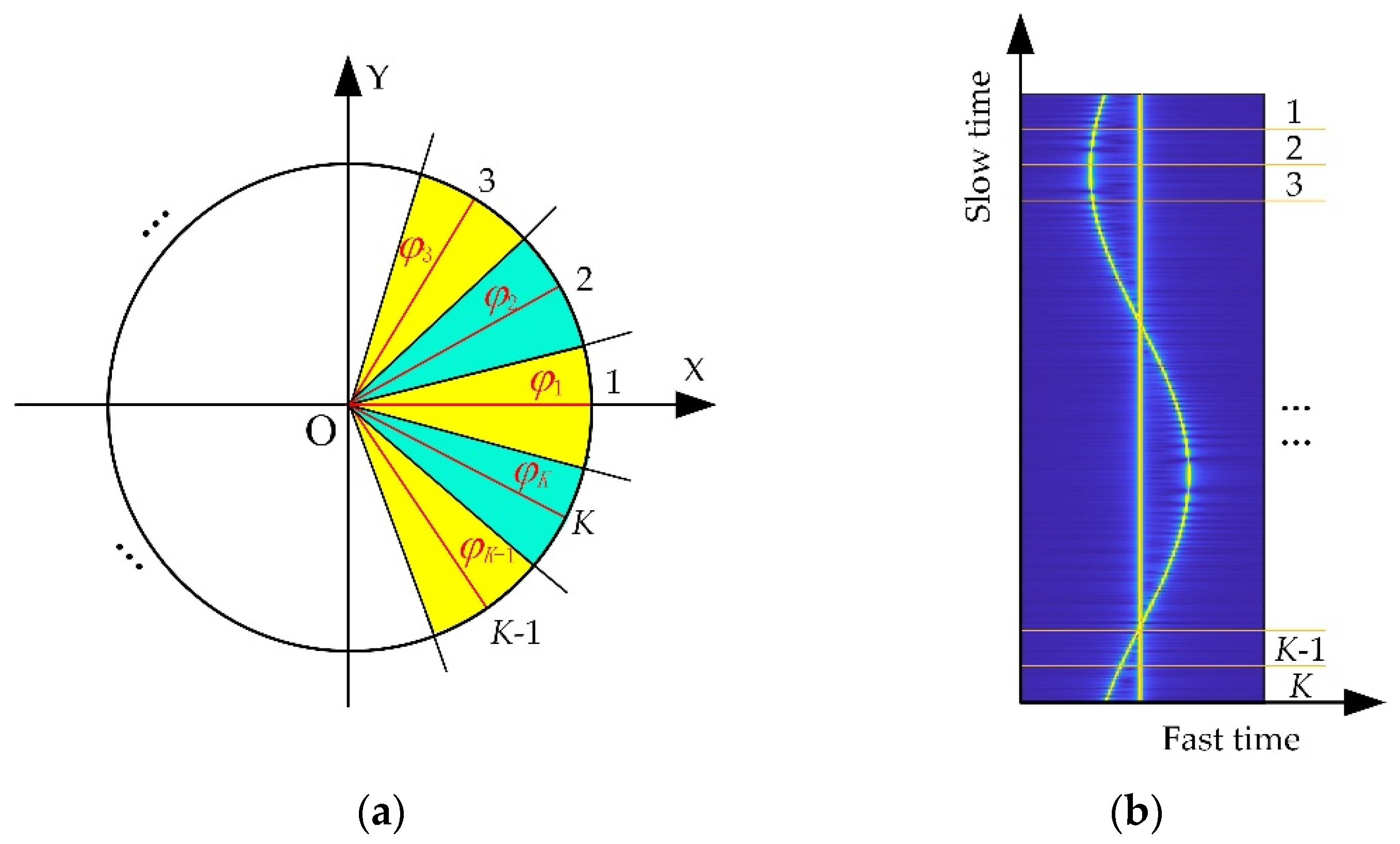
2.3. Sub-Aperture CSAR Imaging Algorithm
2.4. Limitations of Uniformly Overlapping Sub-Apertures
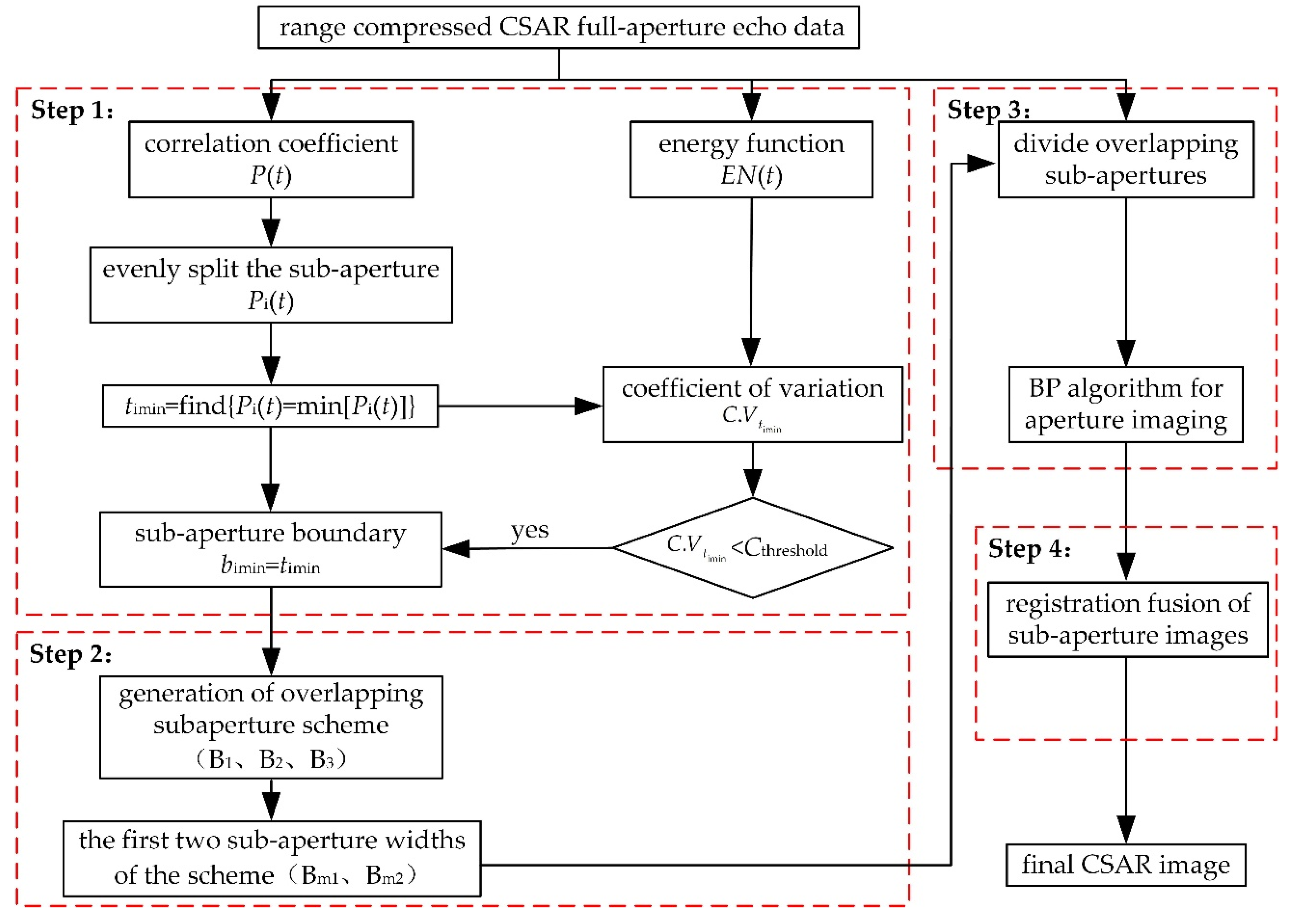
3. Adaptive Overlapping Sub-Aperture CSAR Imaging Algorithm
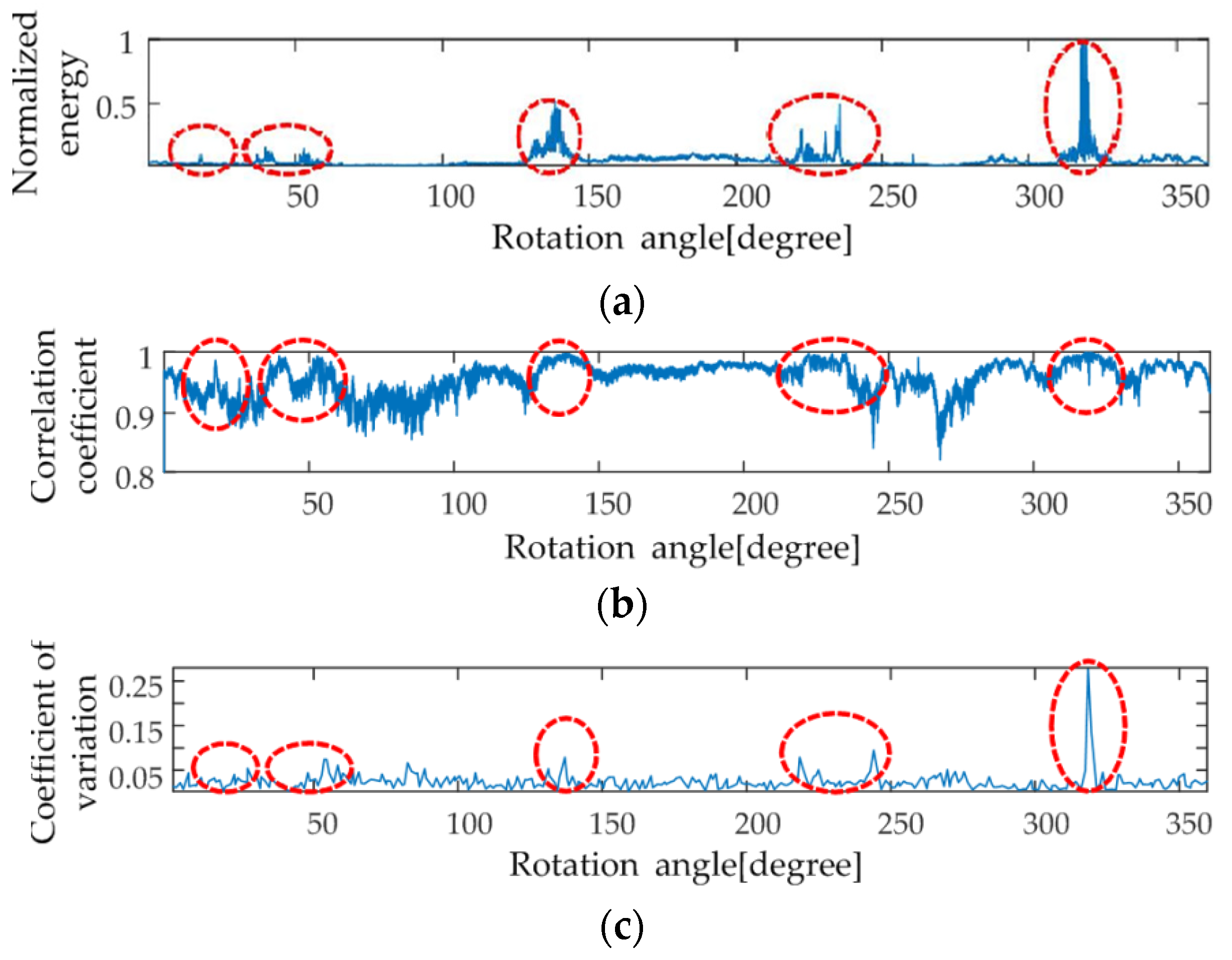
3.1. Determine the Boundary Points of the Sub-Apertures
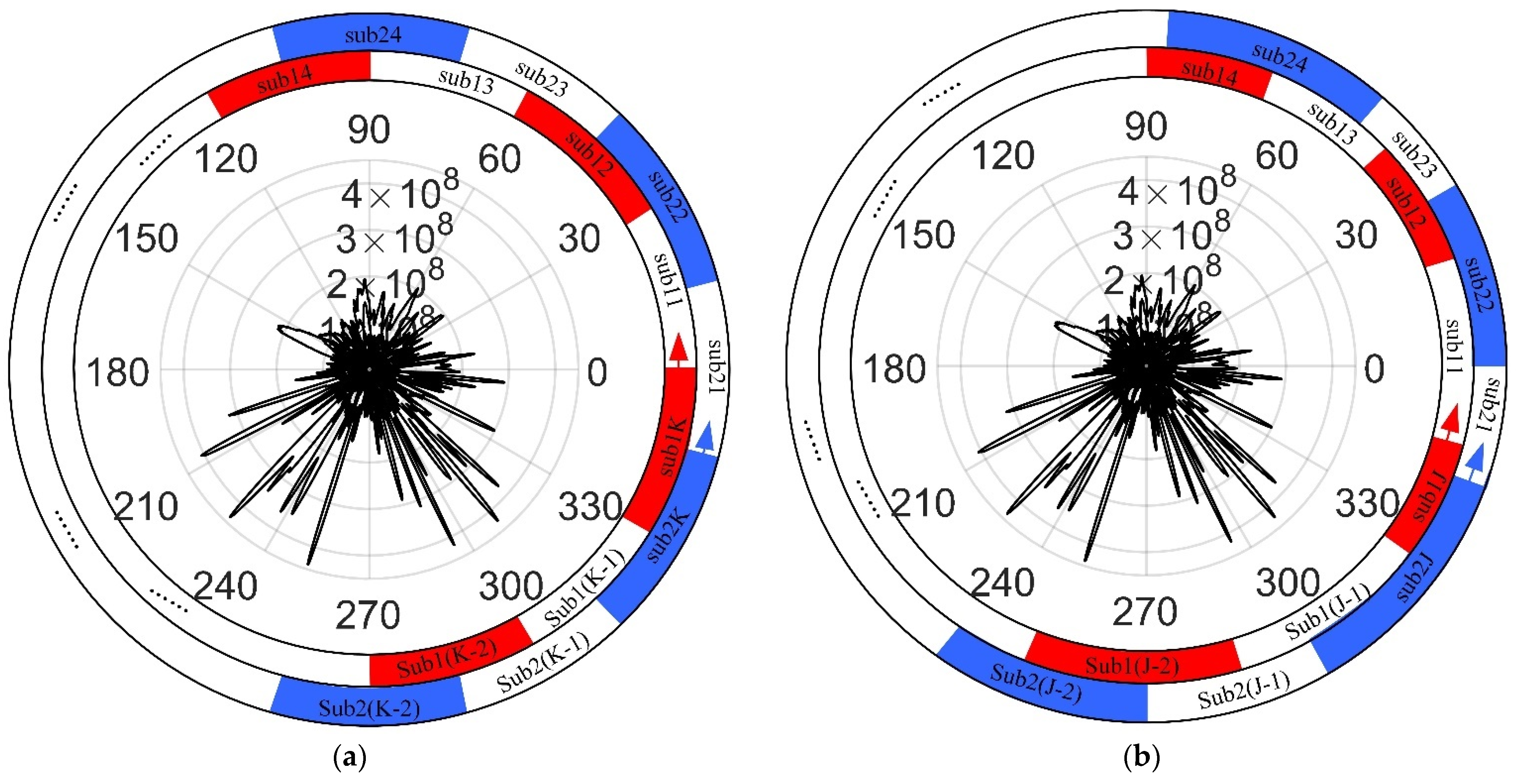
3.2. Automatically Generate Overlapping Sub-Aperture Schemes
3.3. Sub-Aperture BP Imaging
3.4. Sub-Aperture Image Registration Fusion
4. Experiments and Analysis
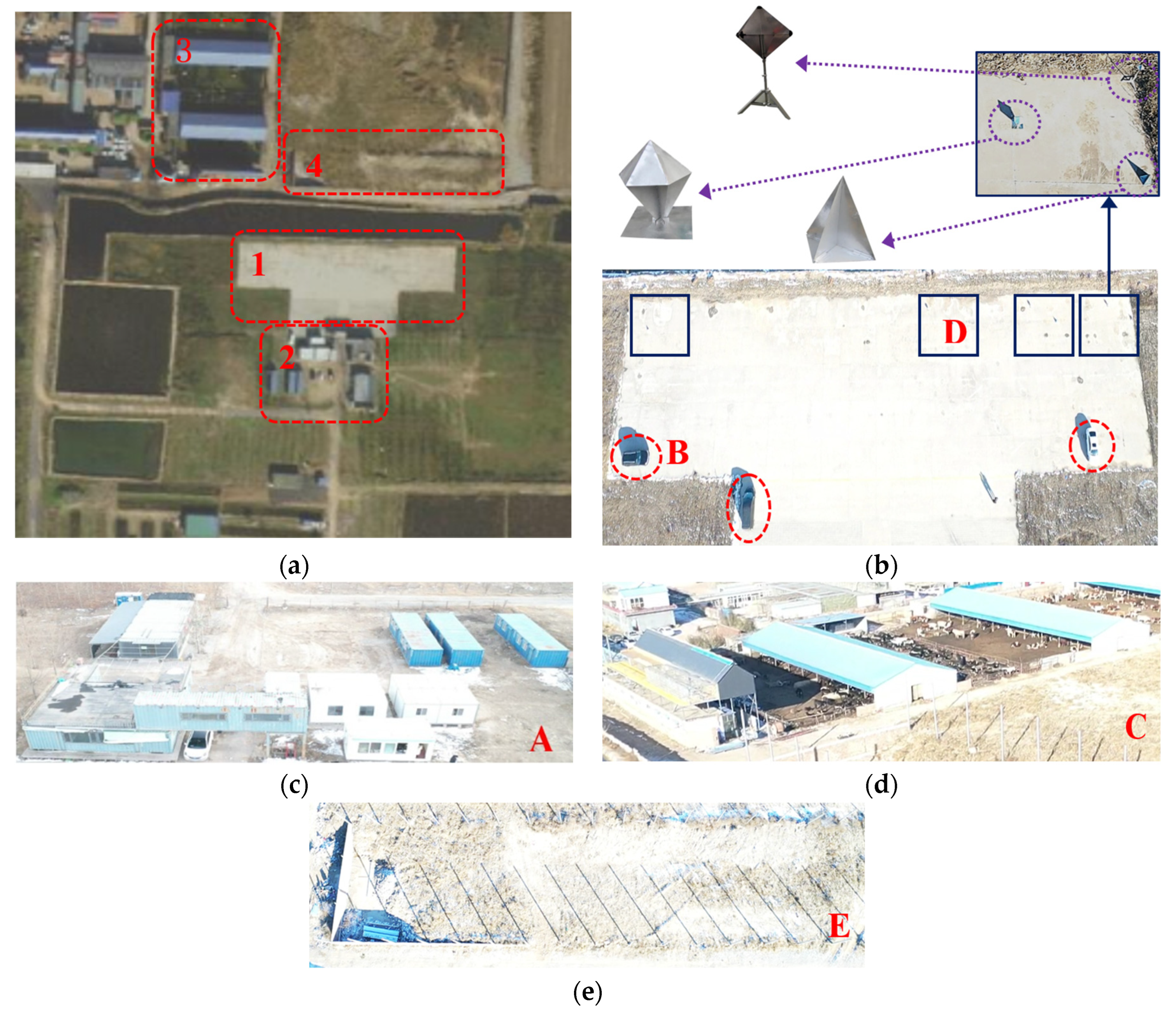
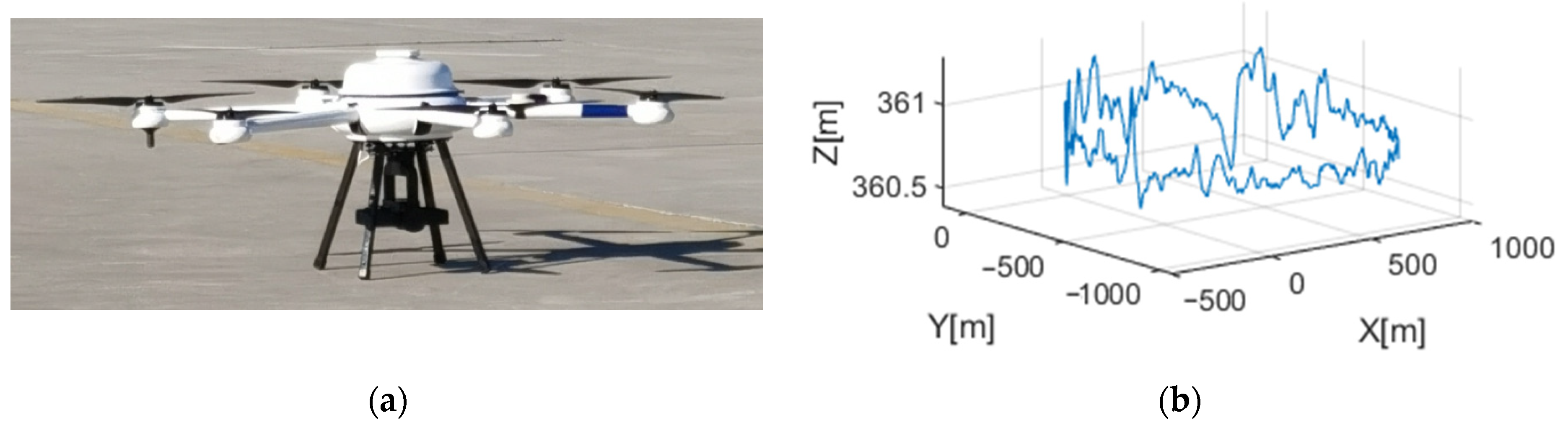
4.1. Experimental Data and Methods
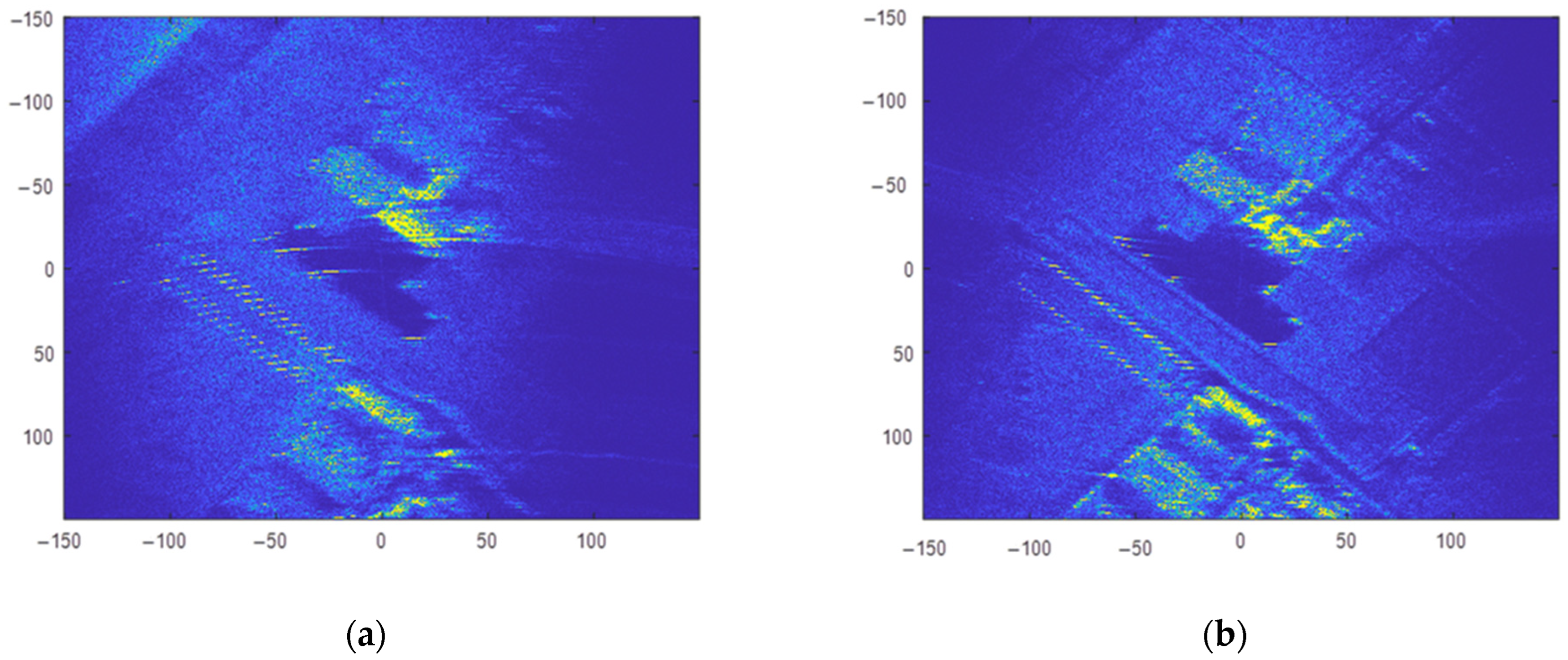
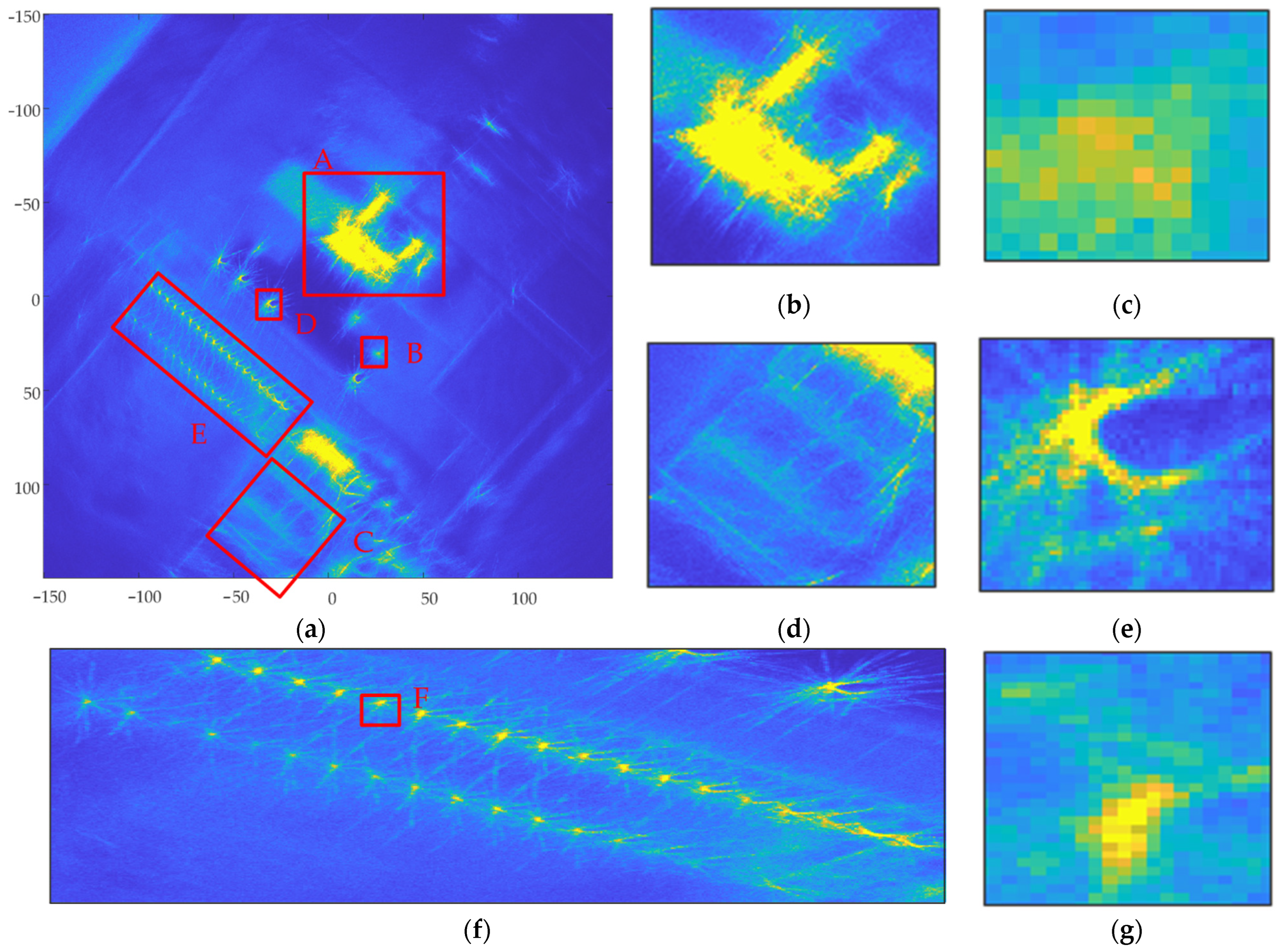
4.2. Analysis of the Results
4.2.1. Anisotropic Targets with Strong Scattering Energy
4.2.2. Anisotropic Target with Weak Scattering Energy
4.2.3. Isotropic Targets
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Knaell, K. Three-dimensional SAR from curvilinear apertures. In Proceedings of the 1996 IEEE National Radar Conference, Ann Arbor, MI, USA, 13–16 May 1996; pp. 220–225. [Google Scholar]
- Cantalloube, H.; Koeniguer, E.C. Assessment of physical limitations of High Resolution on targets at X-band from Circular SAR experiments. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Ash, J.; Ertin, E.; Potter, L.C.; Zelnio, E. Wide-Angle Synthetic Aperture Radar Imaging: Models and algorithms for anisotropic scattering. IEEE Signal Process. Mag. 2014, 31, 16–26. [Google Scholar]
- Frolind, P.; Gustavsson, A.; Lundberg, M.; Ulander, L.M.H. Circular-Aperture VHF-Band Synthetic Aperture Radar for Detection of Vehicles in Forest Concealment. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1329–1339. [Google Scholar] [CrossRef]
- Soumekh, M. Reconnaissance with slant plane circular SAR imaging. IEEE Trans. Image Process. 1996, 5, 1252–1265. [Google Scholar] [CrossRef] [PubMed]
- Oriot, H.; Cantalloube, H. Circular SAR imagery for urban remote sensing. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Dupuis, X.; Martineau, P. Very high resolution circular SAR imaging at X band. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 930–933. [Google Scholar]
- Frölind, P.; Ulander, L.M.H.; Gustavsson, A.; Stenström, G. VHF/UHF-band SAR imaging using circular tracks. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 7409–7411. [Google Scholar]
- Austin, C.D.; Moses, R.L. Wie-Angle Sparse 3D Synthetic Aperture Radar Imaging for Nonlinear Flight Paths. In Proceedings of the 2008 IEEE National Aerospace and Electronics Conference, Dayton, OH, USA, 16–18 July 2008; pp. 330–336. [Google Scholar]
- Ertin, E.; Austin, C.D.; Sharma, S.; Moses, R.L.; Potter, L.C. GOTCHA experience report: Three-dimensional SAR imaging with complete circular apertures. In Proceedings of the SPIE-Algorithms for Synthetic Aperture Radar Imagery XIV, Orlando, FL, USA, 7 May 2007. [Google Scholar]
- Austin, C.D.; Ertin, E.; Moses, R.L. Sparse multipass 3D SAR imaging: Applications to the GOTCHA data set. In Proceedings of the SPIE-Algorithms for Synthetic Aperture Radar Imagery XVI, Orlando, FL, USA, 28 April 2009. [Google Scholar]
- Chen, L.; An, D.; Huang, X.; Zhou, Z. A 3D Reconstruction Strategy of Vehicle Outline Based on Single-Pass Single-Polarization CSAR Data. IEEE Trans. Image Process. 2017, 26, 5545–5554. [Google Scholar] [CrossRef] [PubMed]
- Casteel, J.C.H.; Gorham, L.A.; Minardi, M.J.; Scarborough, S.M.; Naidu, K.D.; Majumder, U.K. A challenge problem for 2D/3D imaging of targets from a volumetric data set in an urban environment. In Proceedings of the SPIE-Algorithms for Synthetic Aperture Radar Imagery XIV, Orlando, FL, USA, 7 May 2007. [Google Scholar]
- LeRoy, G. Large Scene SAR Image Formation. Doctoral Dissertation, Wright State University, Dayton, OH, USA, 2015. [Google Scholar]
- Ponce, O.; Prats, P.; Pinheiro, M.; Rodriguez-Cassola, M.; Scheiber, R.; Reigber, A.; Moreira, A. Fully Polarimetric High-Resolution 3-D Imaging with Circular SAR at L-Band. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3074–3090. [Google Scholar] [CrossRef]
- Ponce, O.; Prats-Iraola, P.; Scheiber, R.; Reigber, A.; Moreira, A.; Aguilera, E. Polarimetric 3-D Reconstruction from Multicircular SAR at P-Band. IEEE Geosci. Remote Sens. Lett. 2014, 11, 803–807. [Google Scholar] [CrossRef]
- Ponce, O.; Prats-Iraola, P.; Scheiber, R.; Reigber, A.; Moreira, A. First Airborne Demonstration of Holographic SAR Tomography with Fully Polarimetric Multicircular Acquisitions at L-Band. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6170–6196. [Google Scholar] [CrossRef]
- Jia, G. Study on the High Resolution Imaging Techniques for UAV Airborne Mini-SAR. Doctoral Dissertation, National University of Defense Technology, Changsha, China, 2015. [Google Scholar]
- Chen, L.; An, D.; Huang, X. A Backprojection-Based Imaging for Circular Synthetic Aperture Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3547–3555. [Google Scholar] [CrossRef]
- Chen, L.; An, D.; Zhou, Z.; Ge, B.; Li, J.; Li, Y. Airborne Dual-Frequency Curvilinear SAR System and Experiment. Radar Sci. Technol. 2021, 19, 248–257. [Google Scholar]
- Lin, Y.; Hong, W.; Tan, W.; Wang, Y.; Xiang, M. Airborne circular SAR imaging: Results at P-band. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5594–5597. [Google Scholar]
- Ponce, O.; Prats, P.; Rodriguez-Cassola, M.; Scheiber, R.; Reigber, A. Processing of circular SAR trajectories with fast factorized back-projection. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 20 October 2011; pp. 3692–3695. [Google Scholar]
- Tian, J. Study on Image Formation for Circular SAR and Related Technologies. Master’s Dissertation, University of Electronic Science and Technology of China, Chengdu, China, 2013. [Google Scholar]
- Jia, G.; Buchroithner, M.F.; Chang, W.; Liu, Z. Fourier-based 2-D imaging algorithm for circular synthetic aperture radar: Analysis and application. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 475–489. [Google Scholar] [CrossRef]
- Mao, X. Application of PFA in SAR Ultra High Resolution Imaging and SAR/GMTI. Doctoral Dissertation, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2009. [Google Scholar]
- Zuo, F.; Li, J.; Hu, R.; Pi, Y. Unified Coordinate System Algorithm for Terahertz Video-SAR Image Formation. IEEE Trans. Terahertz Sci. Technol. 2018, 8, 725–735. [Google Scholar] [CrossRef]
- Ishimary, A.; Chan, T.K.; Kuga, Y. An imaging technique using confocal circular synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1524–1530. [Google Scholar] [CrossRef]
- Wang, J.; Lin, Y.; Guo, S. Circular SAR Optimization Imaging Method of Buildings. J. Radars 2015, 4, 698–707. [Google Scholar]
- Yu, L.; Zhang, Y. CSAR Imaging with Data Extrapolation and Approximate GLRT Techniques. Prog. Electromagn. Res. M 2011, 19, 209–220. [Google Scholar] [CrossRef]
- Moses, R.L.; Potter, L.C.; Cetin, M. Wide angle SAR imaging. In Algorithms for Synthetic Aperture Radar Imagery XI; SPIE: Bellingham, WA, USA, 2004; pp. 164–175. [Google Scholar]
- Liu, T.; Pi, Y.; Yang, X. Wide-angle CSAR imaging based on the adaptive subaperture partition method in the terahertz band. IEEE Trans. Terahertz Sci. Technol. 2017, 8, 165–173. [Google Scholar] [CrossRef]
- Chaney, R.D.; Willsky, A.S.; Novak, L.M. Coherent aspect-dependent SAR image formation. In Algorithms for Synthetic Aperture Radar Imagery; SPIE: Orlando, FL, USA, 1994; Volume 2230, pp. 256–274. [Google Scholar]
- Ertin, E.; Moses, R.L.; Potter, L.C. Interferometric methods for three-dimensional target reconstruction with multipass circular SAR. IET Radar Sonar Navig. 2010, 4, 464–473. [Google Scholar] [CrossRef]
- Li, Y.; Chen, L.; An, D.; Feng, D. An Extracting DEM Method Based on the Sub-apertures Difference in CSAR Mode. Int. J. Remote Sens. 2022, 43, 370–391. [Google Scholar] [CrossRef]
- Zhang, J. Imaging Technology Research and System Implementation for Microminiature UAV FMCW SAR. Doctoral Dissertation, National University of Defense Technology, Changsha, China, 2021. [Google Scholar]
- Liang, Y. Frequency Modulated Continuous Wave SAR Signal Processing. Doctoral Dissertation, Xidian University, Xi’an, China, 2009. [Google Scholar]
- Yan, S.; Li, Y.; Lin, S.; Zhou, Z.; An, D. Focusing of airborne UWB SAR data under the condition of platform maneuvers by using SIFFBP algorithm. J. Natl. Univ. Def. Technol. 2013, 35, 63–68. [Google Scholar]
- Hao, J. Research on Key Technology of Three-Dimensional Imaging of Terahertz Radar. Doctoral Dissertation, University of Electronic Science and Technology of China, Chengdu, China, 2020. [Google Scholar]
- Fisher, R. Statistical Methods, Experimental Design and Scientific Inference; Oxford University Press: New York, NY, USA, 1990. [Google Scholar]
- Ye, Y.; Shen, L.; Hao, M.; Wang, J.; Xu, Z. Robust Optical-to-SAR Image Matching Based on Shape Properties. IEEE Geosci. Remote Sens. Lett. 2017, 14, 564–568. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| waveband | X | flight radius | 600 m |
| bandwidth | 0.75 GHz | flight height | 300 m |
| PRF | 333.3 Hz | velocity | 7 m/s |
| slant range | 500~1000 m |
| Scene | Method 1 | Method 2 | Method 3 | |||
|---|---|---|---|---|---|---|
| full scene | 2.2576 | 3.7459 | 65.92% | 3.7650 | 66.77% | 0.5% |
| region A | 4.3104 | 5.6078 | 30.10% | 5.6831 | 31.85% | 1.34% |
| region B | 5.8517 | 6.8480 | 17.03% | 6.8998 | 17.91% | 0.76% |
| region C | 5.7254 | 6.5113 | 12.73% | 6.5981 | 15.24% | 1.33% |
| region D | 5.8484 | 5.9813 | 2.27% | 6.6466 | 13.65% | 11.12% |
| region E | 5.2842 | 5.6828 | 7.54% | 6.1866 | 17.08% | 8.87% |
| region F | 6.5236 | 6.8384 | 4.83% | 7.0698 | 8.37% | 3.38% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, L.; Ma, Y.; Li, B.; Hou, X.; Shi, Y.; Li, W. A Sub-Aperture Overlapping Imaging Method for Circular Synthetic Aperture Radar Carried by a Small Rotor Unmanned Aerial Vehicle. Sensors 2023, 23, 7849. https://doi.org/10.3390/s23187849
Chu L, Ma Y, Li B, Hou X, Shi Y, Li W. A Sub-Aperture Overlapping Imaging Method for Circular Synthetic Aperture Radar Carried by a Small Rotor Unmanned Aerial Vehicle. Sensors. 2023; 23(18):7849. https://doi.org/10.3390/s23187849
Chicago/Turabian StyleChu, Lina, Yanheng Ma, Bingxuan Li, Xiaoze Hou, Yuanping Shi, and Wei Li. 2023. "A Sub-Aperture Overlapping Imaging Method for Circular Synthetic Aperture Radar Carried by a Small Rotor Unmanned Aerial Vehicle" Sensors 23, no. 18: 7849. https://doi.org/10.3390/s23187849
APA StyleChu, L., Ma, Y., Li, B., Hou, X., Shi, Y., & Li, W. (2023). A Sub-Aperture Overlapping Imaging Method for Circular Synthetic Aperture Radar Carried by a Small Rotor Unmanned Aerial Vehicle. Sensors, 23(18), 7849. https://doi.org/10.3390/s23187849