
A Straightforward Bifurcation Pattern-Based Fundus Image Registration Method



Abstract
:1. Introduction
2. Related Work
3. Proposed Method
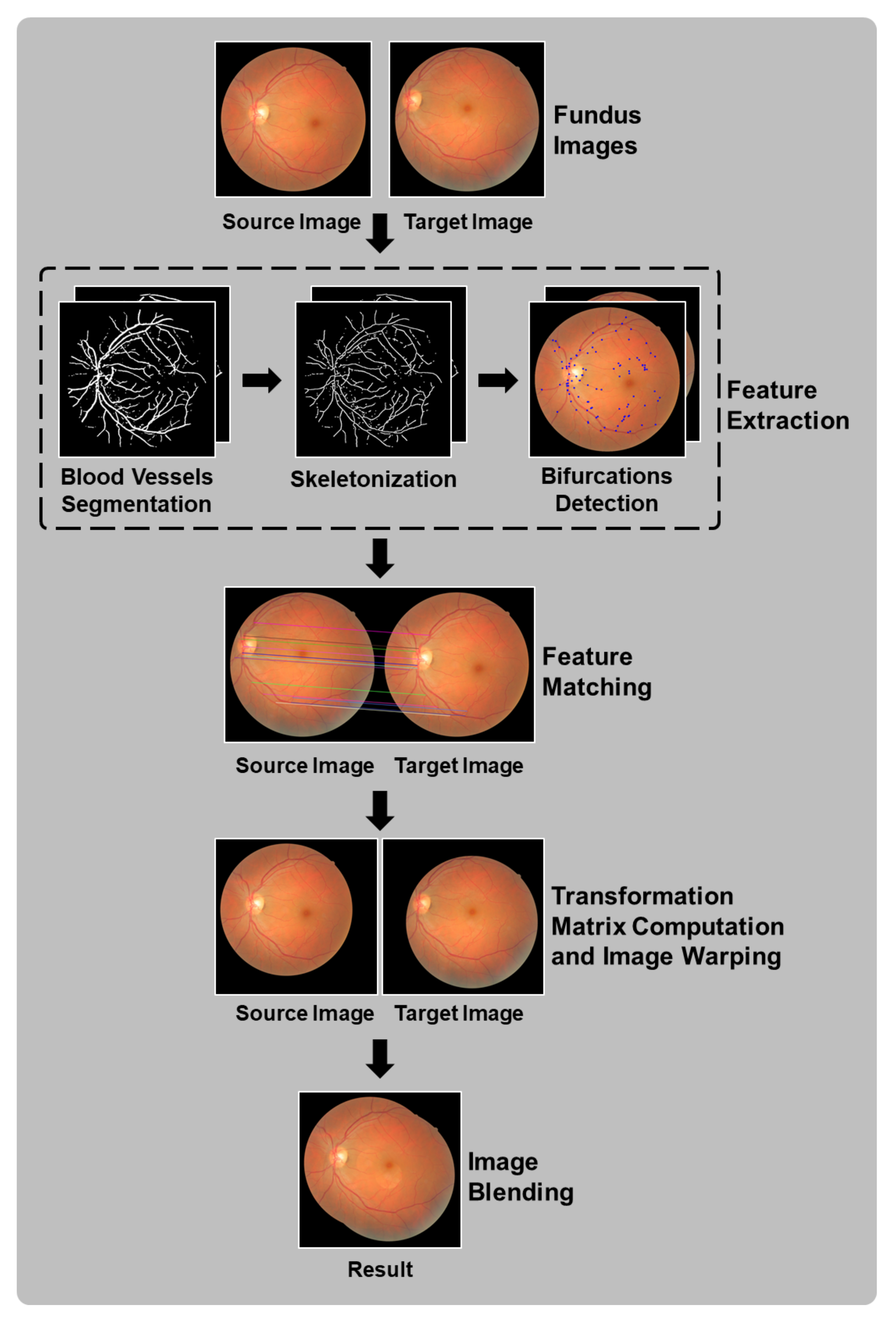
3.1. Flowchart Description
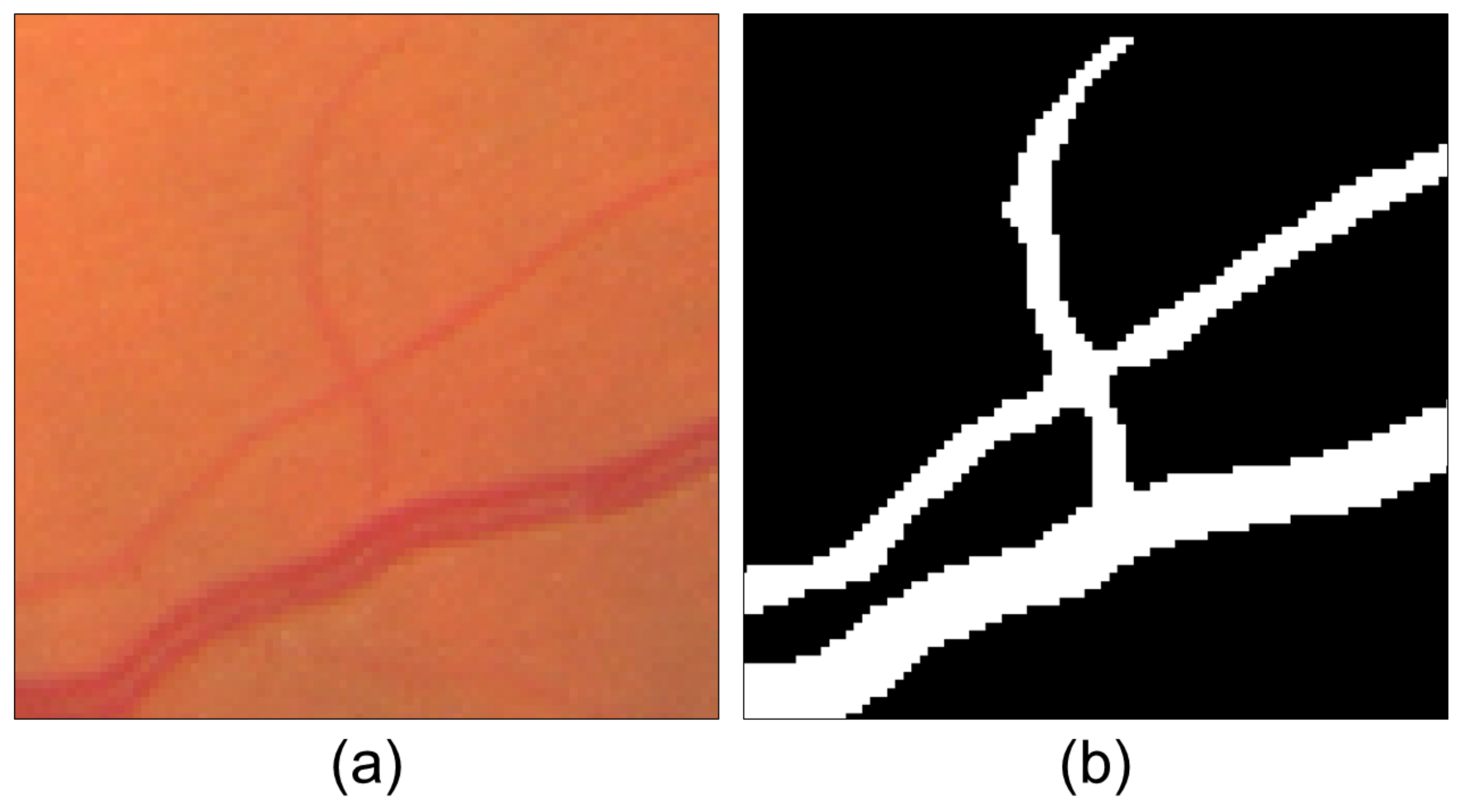
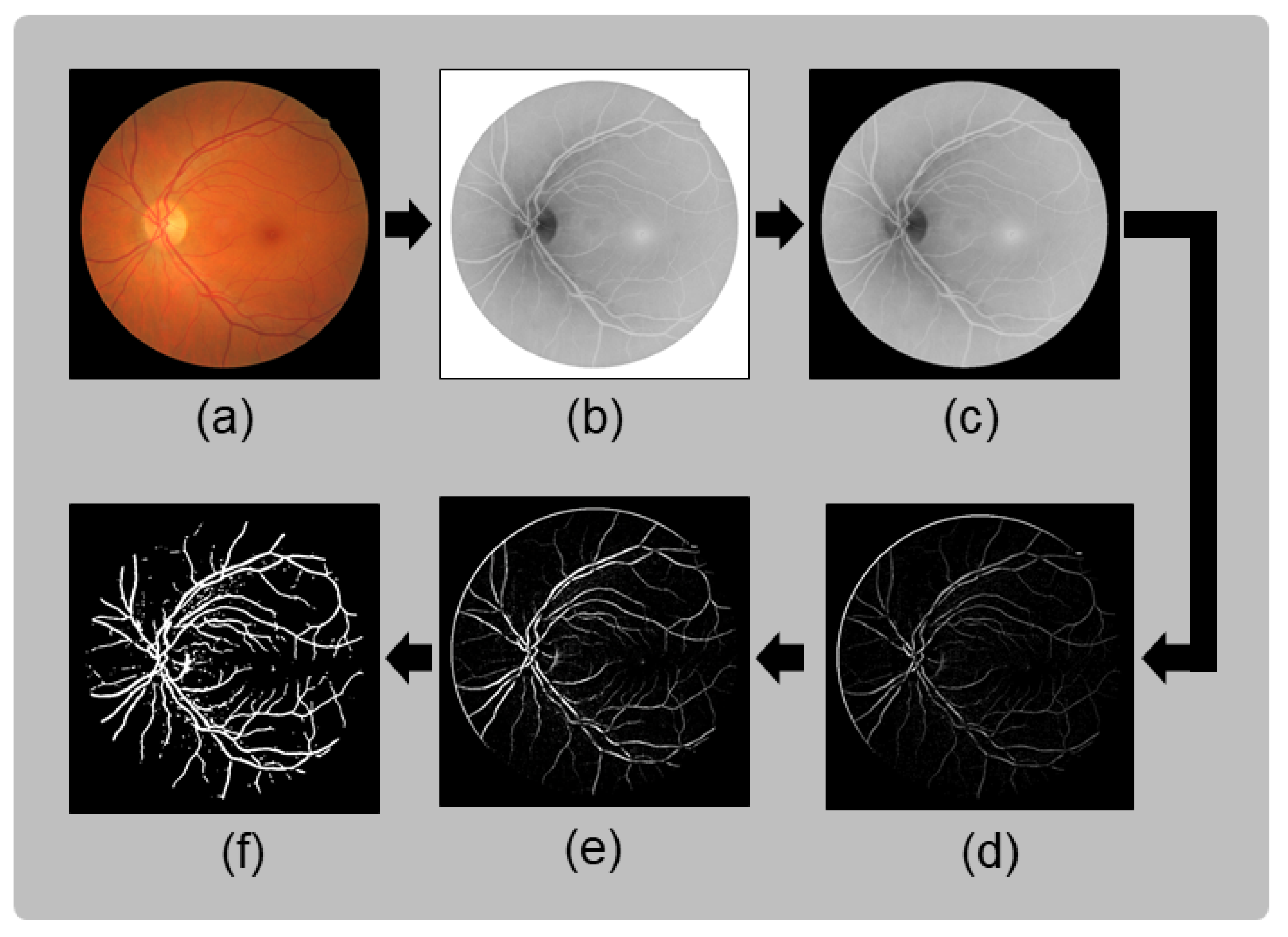
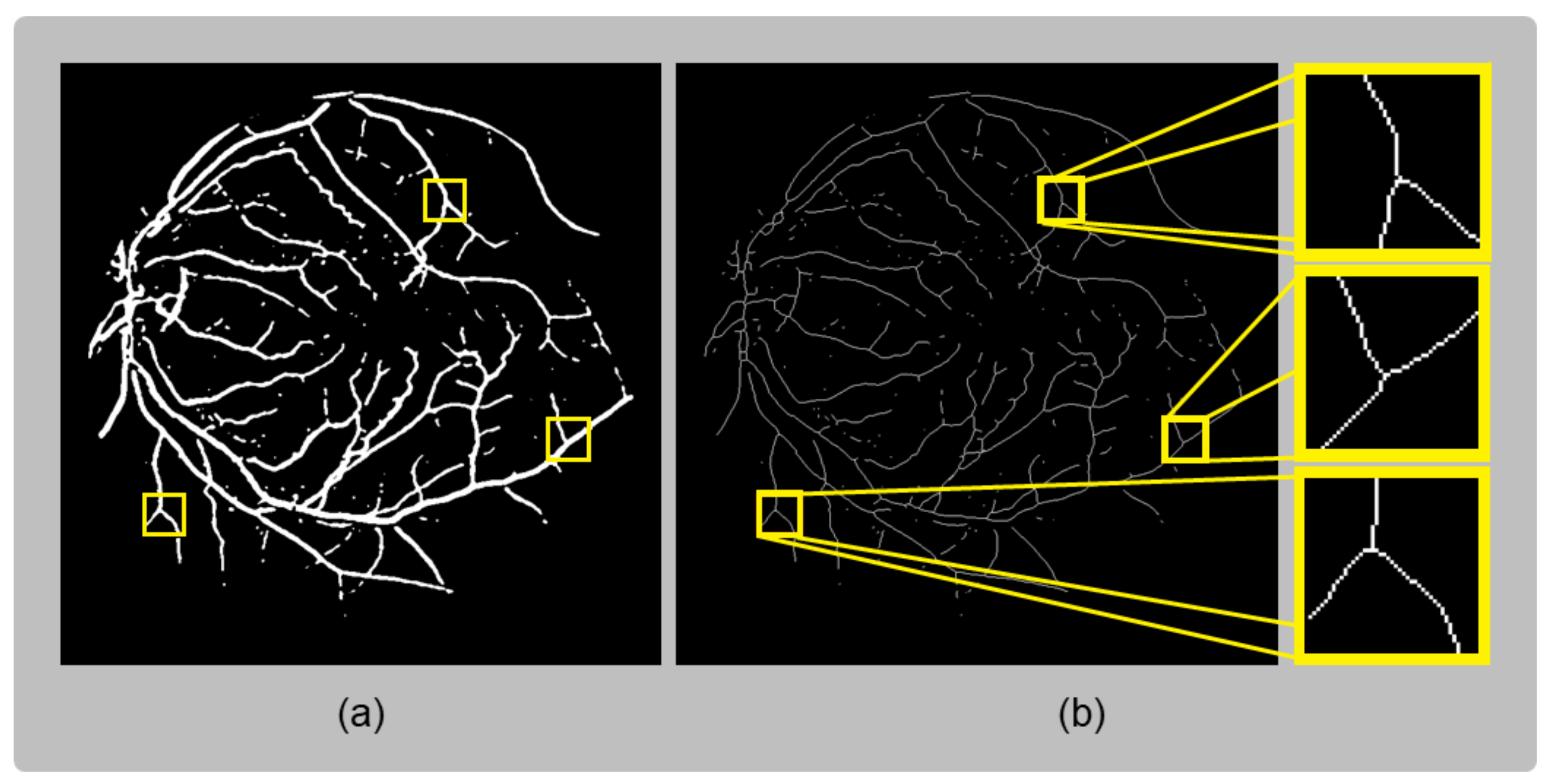
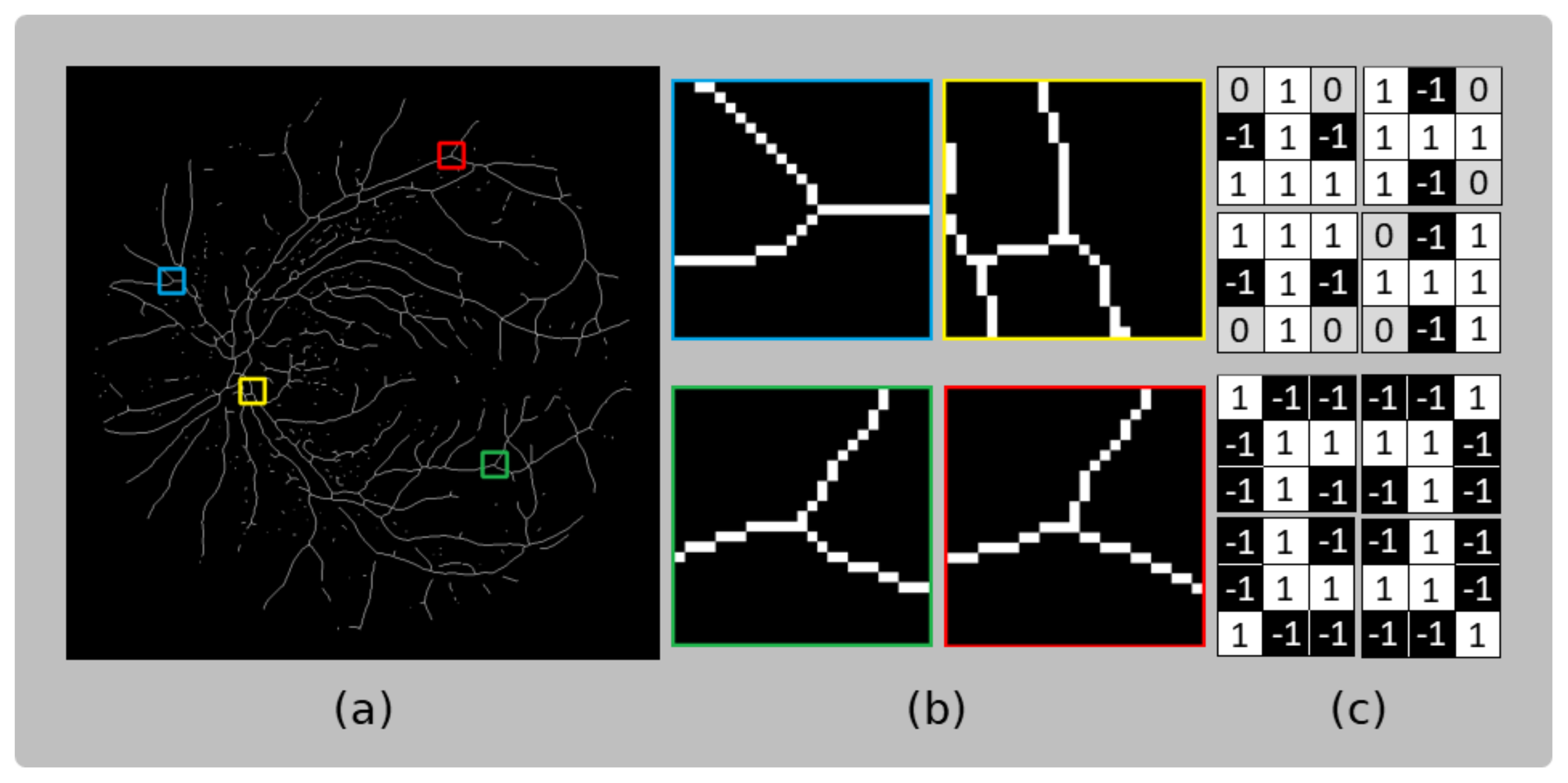
3.2. Feature Extraction
3.3. Feature Matching
3.4. Transformation Matrix Computation and Image Warping
3.5. Image Blending
4. Experimental Results
4.1. Dataset
4.2. Evaluation Metrics
4.3. Performance on the FIRE Public Dataset
5. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Attallah, O. DIAROP: Automated deep learning-based diagnostic tool for retinopathy of prematurity. Diagnostics 2021, 11, 2034. [Google Scholar] [CrossRef] [PubMed]
- Alyoubi, W.L.; Abulkhair, M.F.; Shalash, W.M. Diabetic retinopathy fundus image classification and lesions localization system using deep learning. Sensors 2021, 21, 3704. [Google Scholar] [CrossRef] [PubMed]
- Shankar, K.; Zhang, Y.; Liu, Y.; Wu, L.; Chen, C.H. Hyperparameter tuning deep learning for diabetic retinopathy fundus image classification. IEEE Access 2020, 8, 118164–118173. [Google Scholar] [CrossRef]
- Mateen, M.; Wen, J.; Song, S.; Huang, Z. Fundus image classification using VGG-19 architecture with PCA and SVD. Symmetry 2018, 11, 1. [Google Scholar] [CrossRef]
- Yan, Q.; Weeks, D.E.; Xin, H.; Swaroop, A.; Chew, E.Y.; Huang, H.; Ding, Y.; Chen, W. Deep-learning-based prediction of late age-related macular degeneration progression. Nat. Mach. Intell. 2020, 2, 141–150. [Google Scholar] [CrossRef]
- Tan, J.H.; Bhandary, S.V.; Sivaprasad, S.; Hagiwara, Y.; Bagchi, A.; Raghavendra, U.; Rao, A.K.; Raju, B.; Shetty, N.S.; Gertych, A.; et al. Age-related macular degeneration detection using deep convolutional neural network. Future Gener. Comput. Syst. 2018, 87, 127–135. [Google Scholar] [CrossRef]
- García-Floriano, A.; Ferreira-Santiago, Á.; Camacho-Nieto, O.; Yáñez-Márquez, C. A machine learning approach to medical image classification: Detecting age-related macular degeneration in fundus images. Comput. Electr. Eng. 2019, 75, 218–229. [Google Scholar] [CrossRef]
- Pham, Q.; Ahn, S.; Song, S.J.; Shin, J. Automatic drusen segmentation for age-related macular degeneration in fundus images using deep learning. Electronics 2020, 9, 1617. [Google Scholar] [CrossRef]
- Raghavendra, U.; Fujita, H.; Bhandary, S.V.; Gudigar, A.; Tan, J.H.; Acharya, U.R. Deep convolution neural network for accurate diagnosis of glaucoma using digital fundus images. Inf. Sci. 2018, 441, 41–49. [Google Scholar] [CrossRef]
- Diaz-Pinto, A.; Morales, S.; Naranjo, V.; Köhler, T.; Mossi, J.M.; Navea, A. CNNs for automatic glaucoma assessment using fundus images: An extensive validation. BioMed. Eng. Online 2019, 18, 29. [Google Scholar] [CrossRef]
- Hemelings, R.; Elen, B.; Barbosa-Breda, J.; Lemmens, S.; Meire, M.; Pourjavan, S.; Vandewalle, E.; de Veire, S.V.; Blaschko, M.B.; De Boever, P.; et al. Accurate prediction of glaucoma from colour fundus images with a convolutional neural network that relies on active and transfer learning. Acta Ophthalmol. 2020, 98, e94–e100. [Google Scholar] [CrossRef] [PubMed]
- Veena, H.N.; Muruganandham, A.; Kumaran, T.S. A novel optic disc and optic cup segmentation technique to diagnose glaucoma using deep learning convolutional neural network over retinal fundus images. J. King Saud Univ. Comput. Inf. Sci. 2021, 34, 6187–6198. [Google Scholar] [CrossRef]
- Mishra, C.; Tripathy, K. Fundus Camera; StatPearls Publishing: Tampa, FL, USA, 2022. [Google Scholar]
- Lei, B.; Zhou, M.; Wang, Z.; Chang, Q.; Xu, G.; Jiang, R. Ultra-wide-field fundus imaging of acute retinal necrosis: Clinical characteristics and visual significance. Eye 2020, 34, 864–872. [Google Scholar] [CrossRef] [PubMed]
- Akram, M.U.; Usmani, D.; Ahmad, T.; Abbas, S.; Noor, S.F. Seamless Fundus image stitching using WLD to improve field of view. In Proceedings of the 2015 Fifth International Conference on Digital Information and Communication Technology and Its Applications (DICTAP), Beirut, Lebanon, 29 April–1 May 2015; pp. 106–110. [Google Scholar] [CrossRef]
- Casado-García, Á.; García-Domínguez, M.; Heras, J.; Inés, A.; Royo, D.; Zapata, M.Á. Prediction of epiretinal membrane from retinal fundus images using deep learning. In Advances in Artificial Intelligence: 19th Conference of the Spanish Association for Artificial Intelligence, CAEPIA 2020/2021, Málaga, Spain, 22–24 September 2021; Proceedings 19; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 3–13. [Google Scholar]
- Toslak, D.; Thapa, D.; Chen, Y.; Erol, M.K.; Chan, R.P.; Yao, X. Trans-palpebral illumination: An approach for wide-angle fundus photography without the need for pupil dilation. Opt. Lett. 2016, 41, 2688. [Google Scholar] [CrossRef]
- Hernandez-Matas, C.; Zabulis, X.; Triantafyllou, A.; Anyfanti, P.; Douma, S.; Argyros, A.A. FIRE: Fundus image registration dataset. Model. Artif. Intell. Ophthalmol. 2017, 1, 16–28. [Google Scholar] [CrossRef]
- Das, V.; Dandapat, S.; Bora, P.K. A novel diagnostic information based framework for super-resolution of retinal fundus images. Comput. Med. Imaging Graph. 2019, 72, 22–33. [Google Scholar] [CrossRef] [PubMed]
- Rivas-Villar, D.; Hervella, Á.S.; Rouco, J.; Novo, J. Color fundus image registration using a learning-based domain-specific landmark detection methodology. Comput. Biol. Med. 2022, 140, 105101. [Google Scholar] [CrossRef] [PubMed]
- Cattin, P.C.; Bay, H.; Gool, L.V.; Székely, G. Retina mosaicing using local features. In International Conference on Medical Image Computing and Computer-Assisted Intervention, Copenhagen, Denmark, 1–6 October 2006; Springer: Berlin/Heidelberg, Germany, 2016; pp. 185–192. [Google Scholar]
- Ramli, R.; Hasikin, K.; Idris, M.Y.I.; Karim, N.K.A.; Wahab, A.W.A. Fundus image registration technique based on local feature of retinal vessels. Appl. Sci. 2021, 11, 11201. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157. [Google Scholar]
- Benvenuto, G.A.; Colnago, M.; Casaca, W. Unsupervised Deep Learning Network for Deformable Fundus Image Registration. In Proceedings of the 2022 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2022), Singapore, 23–27 May 2022; pp. 1281–1285. [Google Scholar]
- Wang, Y.; Zhang, J.; An, C.; Cavichini, M.; Jhingan, M.; Amador-Patarroyo, M.J.; Long, C.P.; Bartsch, D.G.; Freeman, W.R.; Nguyen, T.Q. A segmentation based robust deep learning framework for multimodal retinal image registration. In Proceedings of the 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2020), Barcelona, Spain, 4–8 May 2020; pp. 1369–1373. [Google Scholar]
- Feng, X.; Cai, G.; Gou, X.; Yun, Z.; Wang, W.; Yang, W. Retinal mosaicking with vascular bifurcations detected on vessel mask by a convolutional network. J. Healthcare Eng. 2020, 2020, 7156408. [Google Scholar] [CrossRef]
- Hernandez-Matas, C.; Zabulis, X.; Argyros, A.A. REMPE: Registration of retinal images through eye modelling and pose estimation. IEEE J. Biomed. Health Inform. 2020, 24, 3362–3373. [Google Scholar] [CrossRef]
- Chen, L.; Huang, X.; Tian, J. Retinal image registration using topological vascular tree segmentation and bifurcation structures. Biomed. Signal Process. Control 2015, 16, 22–31. [Google Scholar] [CrossRef]
- Ramani, R.G.; Shanthamalar, J.J. Improved image processing techniques for optic disc segmentation in retinal fundus images. Biomed. Signal Process. Control 2020, 58, 101832. [Google Scholar] [CrossRef]
- Wang, L.; Liu, H.; Lu, Y.; Chen, H.; Zhang, J.; Pu, J. A coarse-to-fine deep learning framework for optic disc segmentation in fundus images. Biomed. Signal Process. Control 2019, 51, 82–89. [Google Scholar] [CrossRef] [PubMed]
- Kim, G.Y.; Lee, S.H.; Kim, S.M. Automated segmentation and quantitative analysis of optic disc and fovea in fundus images. Multimed. Tools Appl. 2021, 80, 24205–24220. [Google Scholar] [CrossRef]
- Sedai, S.; Tennakoon, R.; Roy, P.; Cao, K.; Garnavi, R. Multi-stage segmentation of the fovea in retinal fundus images using fully convolutional neural networks. In Proceedings of the 2017 IEEE 14th International Symposium on Biomedical Imaging (ISBI 2017), Melbourne, VIC, Australia, 18–21 April 2017; pp. 1083–1086. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. Lect. Notes Comput. Sci. 2006, 3951, 404–417. [Google Scholar]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; Volume 15, pp. 147–151. [Google Scholar]
- Ramamohanarao, K.; Nguyen, U.T.; Bhuiyan, A. Retinal vascular feature analysis using color fundus imaging. In Proceedings of the 2013 ISSNIP Biosignals and Biorobotics Conference: Biosignals and Robotics for Better and Safer Living (BRC), Rio de Janeiro, Brazil, 18–20 February 2013; pp. 1–9. [Google Scholar]
- Neto, L.C.; Ramalho, G.L.; Neto, J.F.R.; Veras, R.M.; Medeiros, F.N. An unsupervised coarse-to-fine algorithm for blood vessel segmentation in fundus images. Expert Syst. Appl. 2017, 78, 182–192. [Google Scholar] [CrossRef]
- Yang, G.; Stewart, C.V.; Sofka, M.; Tsai, C.L. Registration of challenging image pairs: Initialization, estimation, and decision. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1973–1989. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Xue, J.; Xu, X.; Lu, Z.; Liu, R.; Zhao, B.; Li, Y.; Miao, Q. Robust Multimodal Remote Sensing Image Registration Based on Local Statistical Frequency Information. Remote Sens. 2022, 14, 1051. [Google Scholar] [CrossRef]
- Fraz, M.M.; Remagnino, P.; Hoppe, A.; Uyyanonvara, B.; Rudnicka, A.R.; Owen, C.G.; Barman, S.A. Blood vessel segmentation methodologies in retinal images—A survey. Comput. Methods Programs Biomed. 2012, 108, 407–433. [Google Scholar] [CrossRef]
- Bankhead, P.; Scholfield, C.N.; McGeown, J.G.; Curtis, T.M. Fast retinal vessel detection and measurement using wavelets and edge location refinement. PloS ONE 2012, 7, e32435. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, J.; Wu, W.; Zhou, S. An automatic approach for retinal vessel segmentation by multi-scale morphology and seed point tracking. J. Med. Imaging Health Inform. 2018, 8, 262–274. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef]
- Zhang, T.Y.; Suen, C.Y. A fast parallel algorithm for thinning digital patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar] [CrossRef]
- Yi, Z.; Cao, Z.; Yang, X. Multi-spectral remote image registration based on SIFT. Electron. Lett. 2008, 44, 107–108. [Google Scholar] [CrossRef]
- Lv, G.; Teng, S.W.; Lu, G. Enhancing SIFT-based image registration performance by building and selecting highly discriminating descriptors. Pattern Recognit. Lett. 2016, 84, 156–162. [Google Scholar] [CrossRef]
- Xiang, Y.; Wang, F.; You, H. OS-SIFT: A robust SIFT-like algorithm for high-resolution optical-to-SAR image registration in suburban areas. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3078–3090. [Google Scholar] [CrossRef]
- Ma, W.; Wen, Z.; Wu, Y.; Jiao, L.; Gong, M.; Zheng, Y.; Liu, L. Remote sensing image registration with modified SIFT and enhanced feature matching. IEEE Geosci. Remote Sens. Lett. 2016, 14, 3–7. [Google Scholar] [CrossRef]
- Paul, S.; Pati, U.C. SAR image registration using an improved SAR-SIFT algorithm and Delaunay-triangulation-based local matching. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2958–2966. [Google Scholar] [CrossRef]
- Paul, S.; Durgam, U.K.; Pati, U.C. Multimodal optical image registration using modified SIFT. In Progress in Intelligent Computing Techniques: Theory, Practice, and Applications: Proceedings of ICACNI 2016; Springer: Singapore, 2018; Volume 1, pp. 123–129. [Google Scholar]
- Chen, J.; Tian, J.; Lee, N.; Zheng, J.; Smith, R.T.; Laine, A.F. A partial intensity invariant feature descriptor for multimodal retinal image registration. IEEE Trans. Biomed. Eng. 2010, 57, 1707–1718. [Google Scholar] [CrossRef]
- Chen, L.; Xiang, Y.; Chen, Y.; Zhang, X. Retinal image registration using bifurcation structures. In Proceedings of the 2011 18th IEEE International Conference on Image Processing, Brussels, Belgium, 11–14 September 2011. [Google Scholar]
- Tsai, C.L.; Li, C.Y.; Yang, G.; Lin, K.S. The edge-driven dual-bootstrap iterative closest point algorithm for registration of multimodal fluorescein angiogram sequence. IEEE Trans. Med. Imaging 2009, 29, 636–649. [Google Scholar] [CrossRef]
- Lee, J.A.; Liu, P.; Cheng, J.; Fu, H. A deep step pattern representation for multimodal retinal image registration. In Proceedings of the IEEE/CVF International Conference on Computer Vision 2019, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 5077–5086. [Google Scholar]
- Motta, D.; Casaca, W.; Paiva, A. Fundus image transformation revisited: Towards determining more accurate registrations. In Proceedings of the 2018 IEEE 31st International Symposium on Computer-Based Medical Systems (CBMS), Karlstad, Sweden, 18–21 June 2018; pp. 227–232. [Google Scholar]
- Can, A.; Stewart, C.V.; Roysam, B. Robust hierarchical algorithm for constructing a mosaic from images of the curved human retina. In Proceedings of the 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No PR00149), Fort Collins, CO, USA, 23–25 June 1999; Volume 2. [Google Scholar]
- Ulmschneider, M.; Gentner, C. RANSAC for exchanging maps in multipath assisted positioning. In Proceedings of the 2019 IEEE International Conference on Industrial Cyber Physical Systems (ICPS), Taipei, Taiwan, 6–9 May 2019; pp. 275–281. [Google Scholar]
- Derpanis, K.G. Overview of the RANSAC Algorithm; York University: Rochester, NY, USA, 2010; Volume 4, pp. 2–3. [Google Scholar]
- Manohar, P.; Singh, V. Morphological approach for Retinal Microaneurysm detection. In Proceedings of the 2018 Second International Conference on Advances in Electronics, Computers and Communications (ICAECC), Bangalore, India, 9–10 February 2018; pp. 1–7. [Google Scholar]
- Burt, P.J.; Adelson, E.H. A multiresolution spline with application to image mosaics. ACM Trans. Graph. (TOG) 1983, 2, 217–236. [Google Scholar] [CrossRef]
- e-ophtha: A Color Fundus Image Database. Available online: https://www.adcis.net/en/Download-Third-Party/E-Ophtha.html (accessed on 26 October 2022).
- RODREP: Rotterdam Ophthalmic Data Repository Longitudinal Diabetic Retinopathy Screening Data. Available online: http://www.rodrep.com/longitudinal-diabetic-retinopathy-screening---description.html (accessed on 26 October 2022).
- VARIA. Available online: http://www.varpa.es/research/biometrics.html (accessed on 26 October 2022).
- FIRE: Fundus Image Registration Dataset. Available online: https://projects.ics.forth.gr/cvrl/fire/ (accessed on 26 October 2022).
- Viergever, M.A.; Maintz, J.A.; Klein, S.; Murphy, K.; Staring, M.; Pluim, J.P. A survey of medical image registration—Under review. Med. Image Anal. 2016, 33, 140–144. [Google Scholar] [CrossRef]
- Chen, T.; Yuan, M.; Tang, J.; Lu, L. Digital Analysis of Smart Registration Methods for Magnetic Resonance Images in Public Healthcare. Front. Public Health 2022, 10, 896967. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category S | Category P | Category A | |
|---|---|---|---|
| Total image pairs | 71 | 49 | 14 |
| Approximate overlap | >75% | <75% | >75% |
| Anatomical changes | No | No | Yes |
| Category S | Category P | Category A | FIRE | |
|---|---|---|---|---|
| REMPE (H-M 17) | 0.958 | 0.542 | 0.660 | 0.773 |
| Harris-PIIFD | 0.900 | 0.090 | 0.443 | 0.553 |
| GDB-ICP | 0.814 | 0.303 | 0.303 | 0.576 |
| ED-DB-ICP | 0.604 | 0.441 | 0.497 | 0.553 |
| SURF + WGTM | 0.835 | 0.061 | 0.069 | 0.472 |
| RIR-BS | 0.772 | 0.049 | 0.124 | 0.440 |
| EyeSLAM | 0.308 | 0.224 | 0.269 | 0.273 |
| ATS-RGM | 0.369 | 0.000 | 0.147 | 0.211 |
| Our method 1 | 0.835 | 0.127 | 0.360 | 0.526 |
| Our method 2 | 0.803 | 0.108 | 0.328 | 0.499 |
| Method | Successful Registrations 1 | Registration Error (Pixels) | |||
|---|---|---|---|---|---|
| Min | Max | Mean | Standard Deviation | ||
| Category S | |||||
| Harris-PIIFD | 71 | 0.785 | 12.850 | 2.981 | 1.969 |
| GDB-ICP | 60 | 0.486 | 4.575 | 1.426 | 0.777 |
| Proposed method 2 | 71 | 1.027 | 16.257 | 4.114 | 2.813 |
| Proposed method 3 | 71 | 1.538 | 21.425 | 4.953 | 3.306 |
| Category P | |||||
| Harris-PIIFD | 13 | 10.041 | 3870.632 | 134.862 | 580.485 |
| GDB-ICP | 17 | 1.946 | 6.323 | 3.259 | 1.133 |
| Proposed method 2 | 23 | 8.464 | 1072.128 | 74.586 | 177.689 |
| Proposed method 3 | 16 | 5.180 | 4457.581 | 365.182 | 899.763 |
| Category A | |||||
| Harris-PIIFD | 11 | 3.319 | 1486.255 | 149.331 | 396.753 |
| GDB-ICP | 5 | 2.354 | 10.416 | 4.316 | 3.443 |
| Proposed method 2 | 8 | 3.300 | 1302.518 | 284.825 | 486.440 |
| Proposed method 3 | 7 | 4.511 | 8676.283 | 1034.973 | 2316.048 |
| FIRE | |||||
| Harris-PIIFD | 95 | 0.785 | 3870.632 | 64.298 | 367.154 |
| GDB-ICP | 82 | 0.486 | 10.416 | 1.990 | 1.486 |
| Proposed method 2 | 102 | 1.027 | 1302.518 | 59.212 | 203.945 |
| Proposed method 3 | 94 | 1.538 | 8676.283 | 244.292 | 958.260 |
| Method | Transformation Model | Strategy | Features Points |
|---|---|---|---|
| REMPE (H-M 17) | Ellipsoid eye model | Camera pose estimation | SIFT and bifurcations |
| Harris-PIIFD | Polynomial | Transformation model estimation | Corners |
| GDB-ICP | Quadratic | Transformation model estimation | Corners and edges |
| Proposed method | Similarity/affine | Transformation model estimation | Bifurcations |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ochoa-Astorga, J.E.; Wang, L.; Du, W.; Peng, Y. A Straightforward Bifurcation Pattern-Based Fundus Image Registration Method. Sensors 2023, 23, 7809. https://doi.org/10.3390/s23187809
Ochoa-Astorga JE, Wang L, Du W, Peng Y. A Straightforward Bifurcation Pattern-Based Fundus Image Registration Method. Sensors. 2023; 23(18):7809. https://doi.org/10.3390/s23187809
Chicago/Turabian StyleOchoa-Astorga, Jesús Eduardo, Linni Wang, Weiwei Du, and Yahui Peng. 2023. "A Straightforward Bifurcation Pattern-Based Fundus Image Registration Method" Sensors 23, no. 18: 7809. https://doi.org/10.3390/s23187809
APA StyleOchoa-Astorga, J. E., Wang, L., Du, W., & Peng, Y. (2023). A Straightforward Bifurcation Pattern-Based Fundus Image Registration Method. Sensors, 23(18), 7809. https://doi.org/10.3390/s23187809