
Movement Recognition through Inductive Wireless Links: Investigation of Different Fabrication Techniques



Abstract
:
1. Introduction
2. Materials and Methods
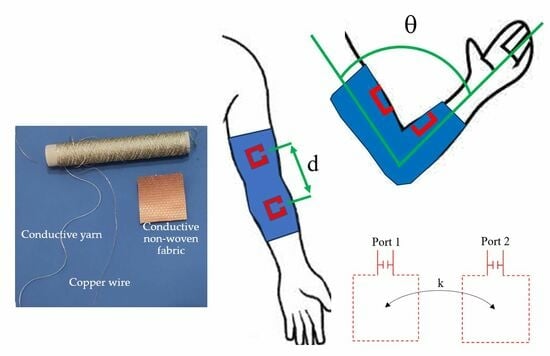
2.1. IR Wireless Link for Joint Flexion Monitoring: Working Principle
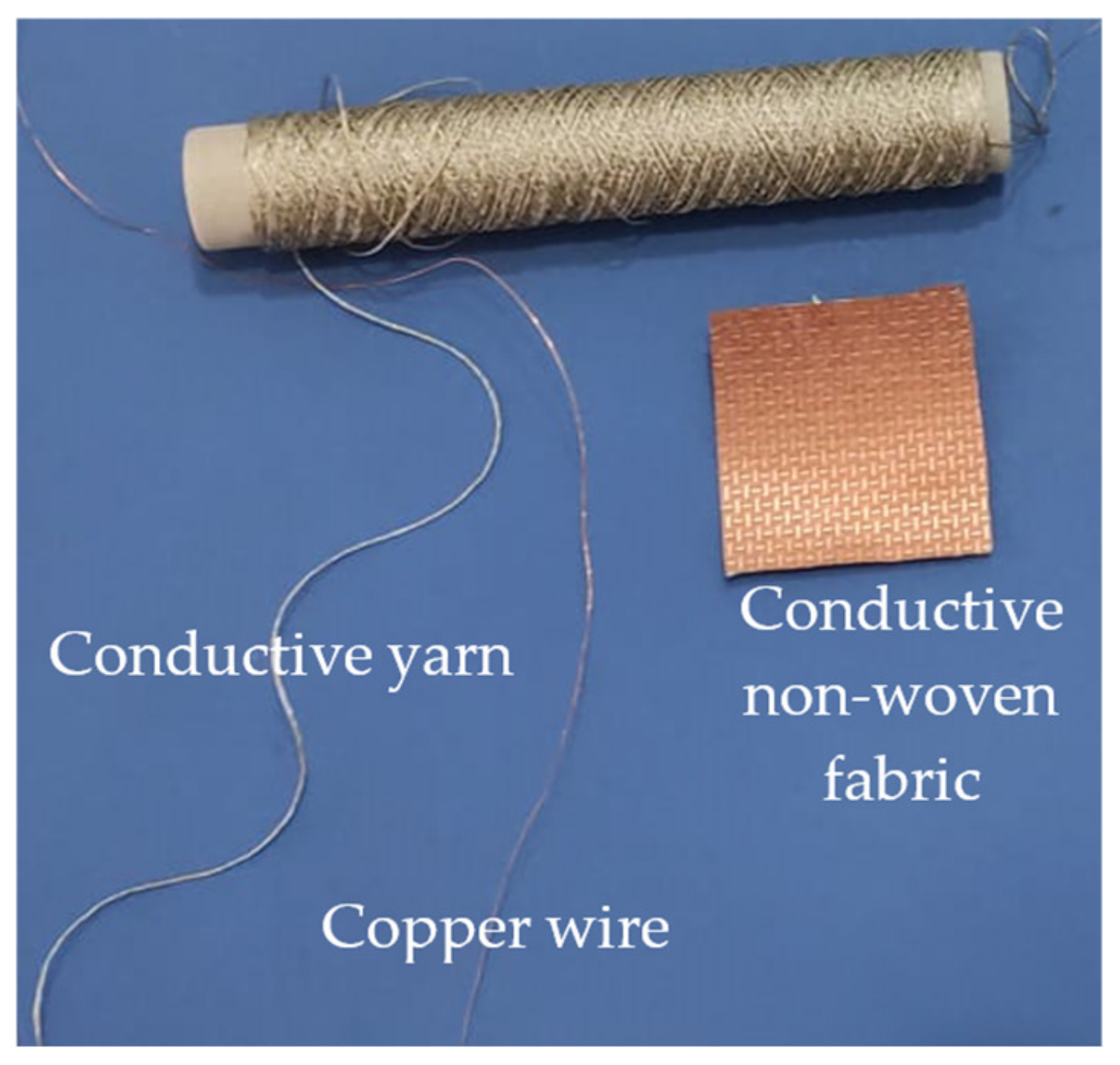
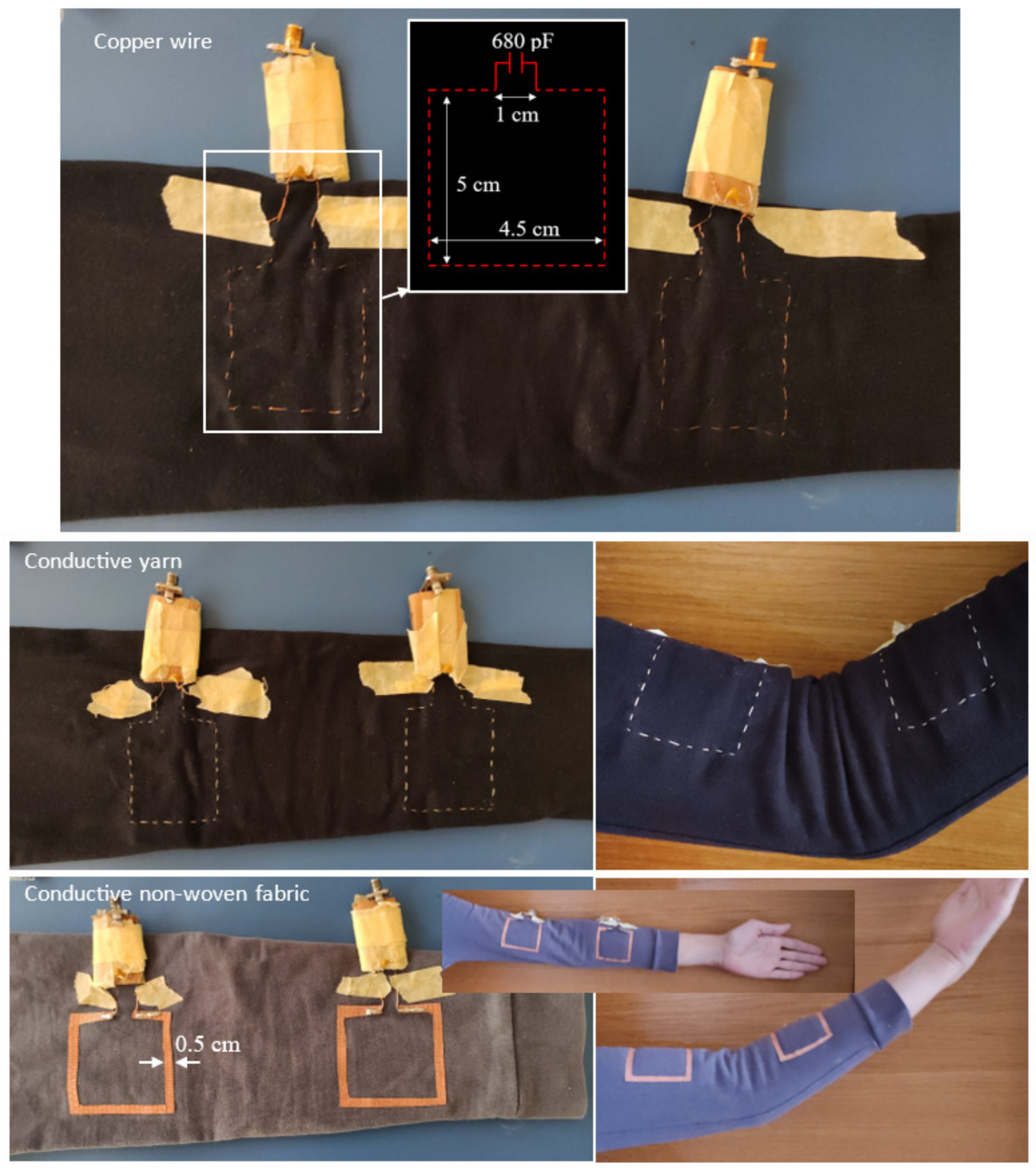
2.2. Analyzed Prototypes: Materials and Fabrication Techniques
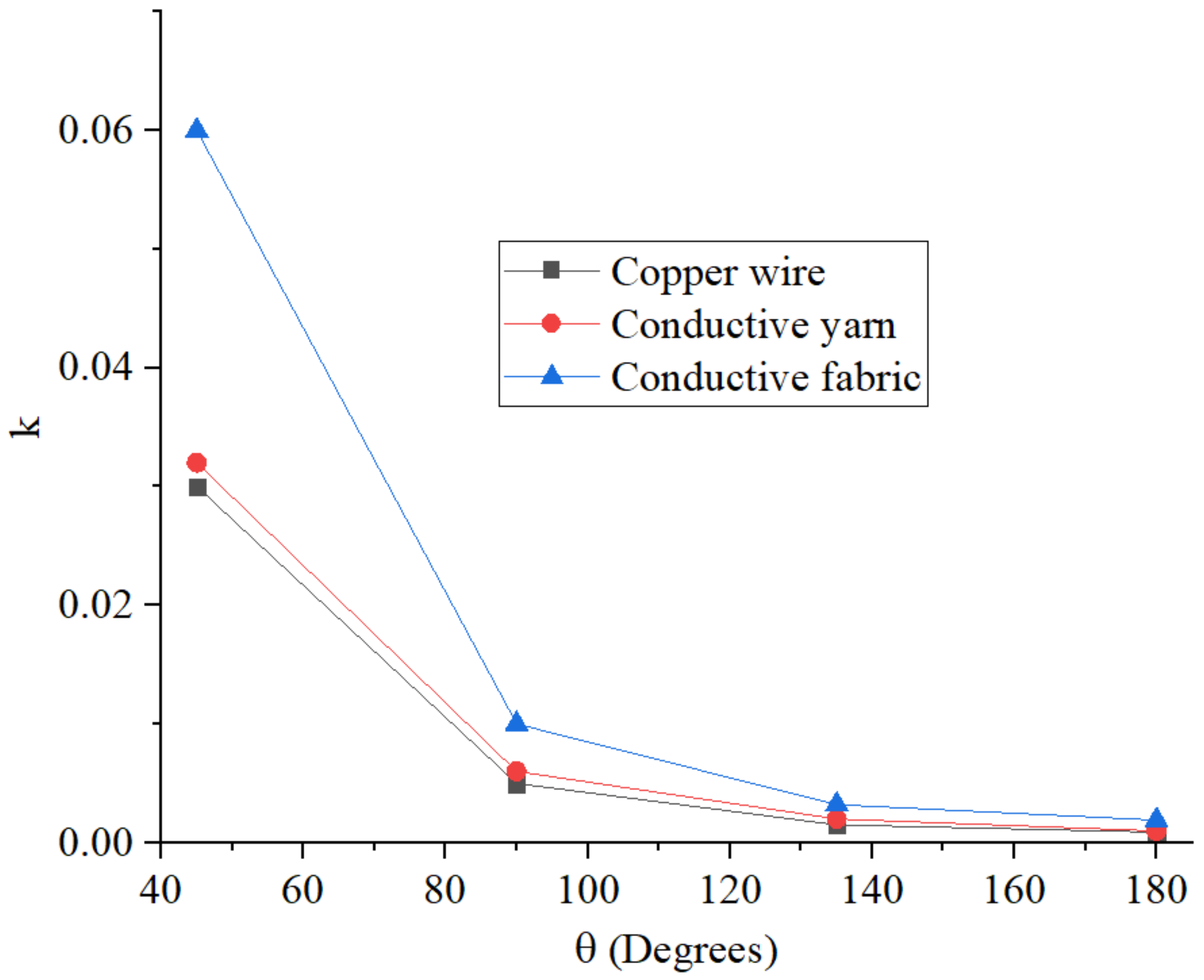
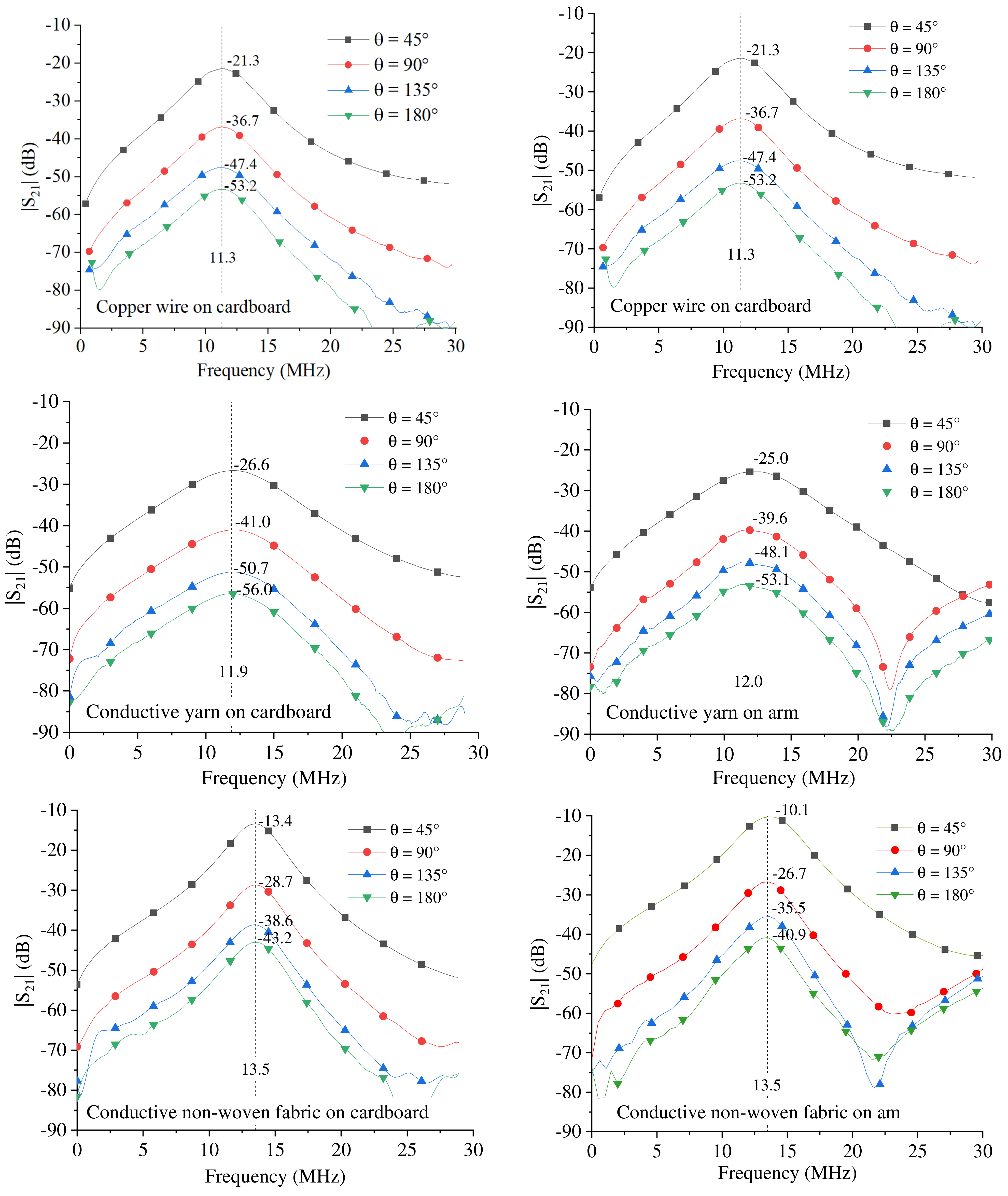
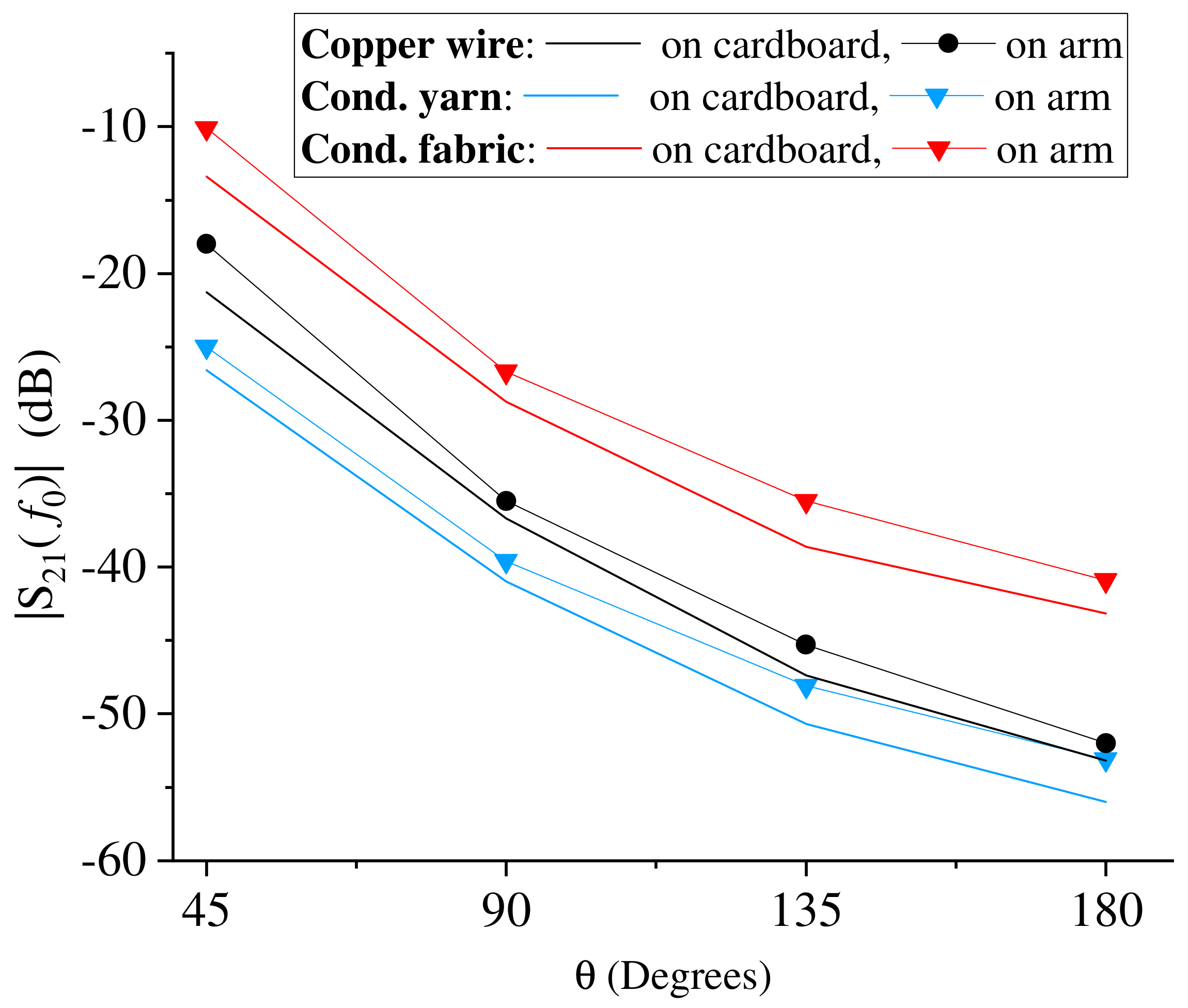
3. Results
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oshimoto, N.; Sakuma, K.; Sekiya, N. Improvement in Power Transmission Efficiency of Wireless Power Transfer System Using Superconducting Intermediate Coil. IEEE Trans. Appl. Supercond. 2023, 33, 1501004. [Google Scholar] [CrossRef]
- Chen, S.; Zeng, J.; Tang, Y. A Super-Resonant Frequency Control for Handshaking of an Inductive Power Transfer System with Adjacent Units. IEEE Trans. Ind. Electron. 2023, 71, 1073–1076. [Google Scholar] [CrossRef]
- Kuperman, A. Simple Enhancement of Series–Series-Compensated Inductive Wireless Power Transfer Links Operating with Load-Independent Voltage Output at Fixed Frequency to Attain Zero Inverter Phase Angle. IEEE Trans. Power Electron. 2023, 38, 5670–5674. [Google Scholar] [CrossRef]
- Mastri, F.; Mongiardo, M.; Monti, G.; Dionigi, M.; Tarricone, L. Gain expressions for resonant inductive wireless power transfer links with one relay element. Wirel. Power Transf. 2018, 5, 27–41. [Google Scholar] [CrossRef]
- Monti, G.; Mastri, F.; Mongiardo, M.; Corchia, L.; Tarricone, L. Load-Independent Operative Regime for an Inductive Resonant WPT Link in Parallel Configuration. IEEE Trans. Microw. Theory Tech. 2020, 68, 1809–1818. [Google Scholar] [CrossRef]
- Monti, G.; Costanzo, A.; Mastri, F.; Mongiardo, M.; Tarricone, L. Rigorous design of matched wireless power transfer links based on inductive coupling. Radio Sci. 2016, 51, 858–867. [Google Scholar] [CrossRef]
- Inoue, R.; Inoue, Y.; Ueda, H.; Kim, S. Investigation of HTS Coil Structure Robustness Against Misalignment Between Coils in a Wireless Power Transmission System for Railway Vehicles. IEEE Trans. Appl. Supercond. 2023, 33, 3600705. [Google Scholar] [CrossRef]
- Inoue, Y.; Inoue, R.; Ueda, H.; Kim, S. Basic Study of a Wireless Power Transmission System Using Superconducting Coil as a Ground-Side Coil for Electric Vehicles. IEEE Trans. Appl. Supercond. 2023, 33, 5400605. [Google Scholar] [CrossRef]
- Monti, G.; De Paolis, M.V.; Corchia, L.; Tarricone, L. Wireless resonant energy link for pulse generators implanted in the chest. IET Microw. Antennas Propag. 2017, 11, 2201–2210. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Maradei, F.; Montalto, A.; Musumeci, F.; Feliziani, M. EMI in a Cardiac Implantable Electronic Device (CIED) by the Wireless Powering of a Left Ventricular Assist Device (LVAD). IEEE Trans. Electromagn. Compat. 2021, 63, 988–995. [Google Scholar] [CrossRef]
- Monti, G.; Tarricone, L.; Trane, C. Experimental characterization of a 434 MHz wireless energy link for medical applications. Prog. Electromagn. Res. C 2012, 30, 53–64. [Google Scholar] [CrossRef]
- Mishra, V.; Kiourti, A. Wrap-Around Wearable Coils for Seamless Monitoring of Joint Flexion. IEEE Trans. Biomed. Eng. 2019, 66, 2753–2760. [Google Scholar] [CrossRef]
- Mishra, V.; Kiourti, A. Wearable Electrically Small Loop Antennas for Monitoring Joint Flexion and Rotation. IEEE Trans. Antennas Propag. 2020, 68, 134–141. [Google Scholar] [CrossRef]
- Brahim, N.; Monti, G.; Tarricone, L. Wireless Resonant Energy Link for Joint Flexion Monitoring: Experimental Investigation by Using a NanoVNA. In Proceedings of the 2022 IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Suzhou, China, 16–18 May 2022; pp. 263–265. [Google Scholar]
- Liu, D.; Hu, H.; Georgakopoulos, S.V. Misalignment Sensitivity of Strongly Coupled Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2017, 32, 5509–5519. [Google Scholar] [CrossRef]
- Wang, Q.; Che, W.; Mongiardo, M.; Monti, G. Wireless Power Transfer System with High Misalignment Tolerance for Bio-Medical Implants. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3023–3027. [Google Scholar] [CrossRef]
- Monti, G.; Mastri, F.; Mongiardo, M.; Corchia, L.; Tarricone, L. Transducer gain maximization for a resonant inductive WPT link using relay resonators. In Proceedings of the 2018 IEEE MTT-S International Wireless Symposium (IWS), Chengdu, China, 6–10 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Heinz, E.A.; Kunze, K.S.; Gruber, M.; Bannach, D.; Lukowicz, P. Using Wearable Sensors for Real-Time Recognition Tasks in Games of Martial Arts—An Initial Experiment. In Proceedings of the 2006 IEEE Symposium on Computational Intelligence and Games, Reno, NV, USA, 22–24 May 2006; pp. 98–102. [Google Scholar]
- Bisio, I.; Delfino, A.; Lavagetto, F.; Sciarrone, A. Enabling IoT for In-Home Rehabilitation: Accelerometer Signals Classification Methods for Activity and Movement Recognition. IEEE Internet Things J. 2017, 4, 135–146. [Google Scholar] [CrossRef]
- Host, K.; Ivašić-Kos, M. An overview of Human Action Recognition in sports based on Computer Vision. Heliyon 2022, 8, e09633. [Google Scholar] [CrossRef]
- Abdallah, N.H.; Brahim, R.; Bouslimani, Y.; Ghribi, M.; Kaddouri, A. IoT device for Athlete’s movements recognition using inertial measurement unit (IMU). In Proceedings of the 2021 IEEE International Conference on Industry 4.0, Artificial Intelligence, and Communications Technology (IAICT), Bandung, Indonesia, 27–28 July 2021; pp. 109–114. [Google Scholar]
- Ma, R.; Yan, D.; Peng, H.; Yang, T.; Sha, X.; Zhao, Y.; Liu, L. Basketball Movements Recognition Using a Wrist Wearable Inertial Measurement Unit. In Proceedings of the 2018 IEEE 1st International Conference on Micro/Nano Sensors for AI, Healthcare, and Robotics (NSENS), Shenzhen, China, 5–7 December 2018; pp. 73–76. [Google Scholar]
- Zaltieri, M.; Presti, D.L.; Bravi, M.; Caponero, M.A.; Sterzi, S.; Schena, E.; Massaroni, C. Assessment of a Multi-Sensor FBG-Based Wearable System in Sitting Postures Recognition and Respiratory Rate Evaluation of Office Workers. IEEE Trans. Biomed. Eng. 2023, 70, 1673–1682. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Yarovoy, A.; Fioranelli, F. Angle-Insensitive Human Motion and Posture Recognition Based on 4D Imaging Radar and Deep Learning Classifiers. IEEE Sens. J. 2022, 22, 12173–12182. [Google Scholar] [CrossRef]
- Eichelberger, P.; Ferraro, M.; Minder, U.; Denton, T.; Blasimann, A.; Krause, F.; Baur, H. Analysis of accuracy in optical motion capture—A protocol for laboratory setup evaluation. J. Biomech. 2016, 49, 2085–2088. [Google Scholar] [CrossRef] [PubMed]
- Lu, W.; Tan, Y.P. A vision-based approach to early detection of drowning incidents in swimming pools. IEEE Trans. Circuits Syst. Video Technol. 2004, 14, 159–178. [Google Scholar] [CrossRef]
- Stone, E.E.; Skubic, M. Unobtrusive, continuous, in-home gait measurement using the Microsoft Kinect. IEEE Trans. Biomed. Eng. 2013, 60, 2925–2932. [Google Scholar] [CrossRef] [PubMed]
- Turaga, P.; Ivanov, Y.A. Diamond Sentry: Integrating Sensors and Cameras for Real-Time Monitoring of Indoor Spaces. IEEE Sens. J. 2011, 11, 593–602. [Google Scholar] [CrossRef]
- Xu, M.; Guo, L.; Wu, H.-C. Robust Abnormal Human-Posture Recognition Using OpenPose and Multiview Cross-Information. IEEE Sens. J. 2023, 23, 12370–12379. [Google Scholar] [CrossRef]
- Yasin, H.; Krüger, B. An Efficient 3D Human Pose Retrieval and Reconstruction from 2D Image-Based Landmarks. Sensors 2021, 21, 2415. [Google Scholar] [CrossRef] [PubMed]
- Lian, C.; Ren, X.; Zhao, Y.; Zhang, X.; Chen, R.; Wang, S.; Sha, X.; Li, W.J. Towards a Virtual Keyboard Scheme Based on Wearing One Motion Sensor Ring on Each Hand. IEEE Sens. J. 2021, 21, 3379–3387. [Google Scholar] [CrossRef]
- Pei, L.; Xia, S.; Chu, L.; Xiao, F.; Wu, Q.; Yu, W.; Qiu, R. MARS: Mixed Virtual and Real Wearable Sensors for Human Activity Recognition with Multidomain Deep Learning Model. IEEE Internet Things J. 2021, 8, 9383–9396. [Google Scholar] [CrossRef]
- Pan, T.Y.; Chang, C.Y.; Tsai, W.L.; Hu, M.C. Multisensor-Based 3D Gesture Recognition for a Decision-Making Training System. IEEE Sens. J. 2021, 21, 706–716. [Google Scholar] [CrossRef]
- Hong, F.; You, S.; Wei, M.; Zhang, Y.; Guo, Z. MGRA: Motion Gesture Recognition via Accelerometer. Sensors 2016, 16, 530. [Google Scholar] [CrossRef] [PubMed]
- Monti, G.; Corchia, L.; Tarricone, L. Fabrication techniques for wearable antennas. In Proceedings of the 2013 European Microwave Conference, Nuremberg, Germany, 9–11 October 2013; pp. 1747–1750. [Google Scholar]
- Corchia, L.; Monti, G.; Tarricone, L. A Frequency Signature RFID Chipless Tag for Wearable Applications. Sensors 2019, 19, 494. [Google Scholar] [CrossRef] [PubMed]
- Shieldex® 235/36 HCB. Available online: https://www.shieldex.de/en/products/shieldex-235-36-hcb-2/ (accessed on 26 July 2023).
- Shieldex® Kiel-SK-96. Available online: https://www.shieldex.de/en/products/shieldex-kiel-sk-96/ (accessed on 26 July 2023).
- AWR Design Environment Platform. Available online: https://www.cadence.com/en_US/home/tools/system-analysis/rf-microwave-design/awr-design-environment-platform.html (accessed on 26 July 2023).
- Wang, Q.; Che, W.; Monti, G.; Mongiardo, M. Measurements for Wireless Power Transfer by Using NanoVNA. In Proceedings of the 2021 XXXIVth General Assembly and Scientific Symposium of the International Union of Radio Science (URSI GASS), Rome, Italy, 28 August–4 September 2021; pp. 1–3. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Electrical Properties (Resistivity) | Fabrication Technique | Support |
|---|---|---|---|
| Copper wire | 0.6 (Ω/m) | Hand embroidery | Elastic fleece shirt |
| Conductive yarn | <600 Ω/m | Hand embroidery | Elastic fleece shirt |
| Conductive non-woven fabric | <0.02 Ohms per square | Attached by using the self-adhesive of the fabric | Elastic fleece shirt |
| w1 (cm) | w2 (cm) | we (cm) | g (cm) | d (cm) |
|---|---|---|---|---|
| 5 | 4.5 | 0.5 | 1 | 15.5 |
| L1 ≈ L2 (nH) | R1 ≈ R2 (Ω) | C (pF) | k | f0 (MHz) | ||||
|---|---|---|---|---|---|---|---|---|
| θ = 45° | θ = 90° | θ = 135° | θ = 180° | |||||
| Copper wire | 295.00 ± 29.5 | 160.00 | 680.00 ± 68 | 0.0300 | 0.0050 | 0.0015 | 0.0009 | 11.30 |
| Conductive yarn | 266.00 ± 26.6 | 52.00 | 680.00 ± 68 | 0.0320 | 0.0060 | 0.002 | 0.001 | 11.90 |
| Conductive non-woven fabric | 206.00 ± 20.6 | 180.00 | 680.00 ± 68 | 0.0600 | 0.0100 | 0.0032 | 0.0019 | 13.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monti, G.; Tarricone, L. Movement Recognition through Inductive Wireless Links: Investigation of Different Fabrication Techniques. Sensors 2023, 23, 7748. https://doi.org/10.3390/s23187748
Monti G, Tarricone L. Movement Recognition through Inductive Wireless Links: Investigation of Different Fabrication Techniques. Sensors. 2023; 23(18):7748. https://doi.org/10.3390/s23187748
Chicago/Turabian StyleMonti, Giuseppina, and Luciano Tarricone. 2023. "Movement Recognition through Inductive Wireless Links: Investigation of Different Fabrication Techniques" Sensors 23, no. 18: 7748. https://doi.org/10.3390/s23187748
APA StyleMonti, G., & Tarricone, L. (2023). Movement Recognition through Inductive Wireless Links: Investigation of Different Fabrication Techniques. Sensors, 23(18), 7748. https://doi.org/10.3390/s23187748