

Review of Vision-Based Deep Learning Parking Slot Detection on Surround View Images



Abstract
1. Introduction
2. Research Procedure
2.1. Motivation
2.2. Research Question
- How many types of deep learning approaches are utilized in parking slot detection?
- What are the specific techniques and methodologies employed to detect parking slots using deep learning?
- What are the strengths and limitations associated with each deep learning method used for parking slot detection?
- Which benchmark datasets have been commonly employed to evaluate the performance of these methods?
- What are the evaluation metrics employed to assess the accuracy and effectiveness of the deep-learning-based parking slot detection methods?
2.3. Research Inclusion/Exclusion Criteria
- Inclusion Criteria (IC)
- ○
- IC1: Include works that address the topic of parking slot detection.
- ○
- IC2: Include works that utilize surround view images.
- Exclusion Criteria (IC)
- ○
- EC1: Exclude works that are not written in English.
- ○
- EC2: Exclude works that utilize surveillance cameras or are not relevant to the view of autonomous vehicles.
- ○
- EC3: Exclude works that do not employ deep learning approaches.
2.4. Contributions of This Work
- Diligent Review and Tabulation: To the best of our knowledge, we have meticulously reviewed nearly all published papers on deep-learning-based parking slot detection methods to date. Our thorough analysis has resulted in the meticulous tabulation of the obtained results, making a valuable contribution to the research community.
- First Deep-Learning-Centered Survey: This survey serves as the pioneering deep-learning-centered exploration of parking slot detection. It aims to provide valuable insights and guidance to researchers interested in applying deep learning techniques to their future parking slot detection research endeavors.
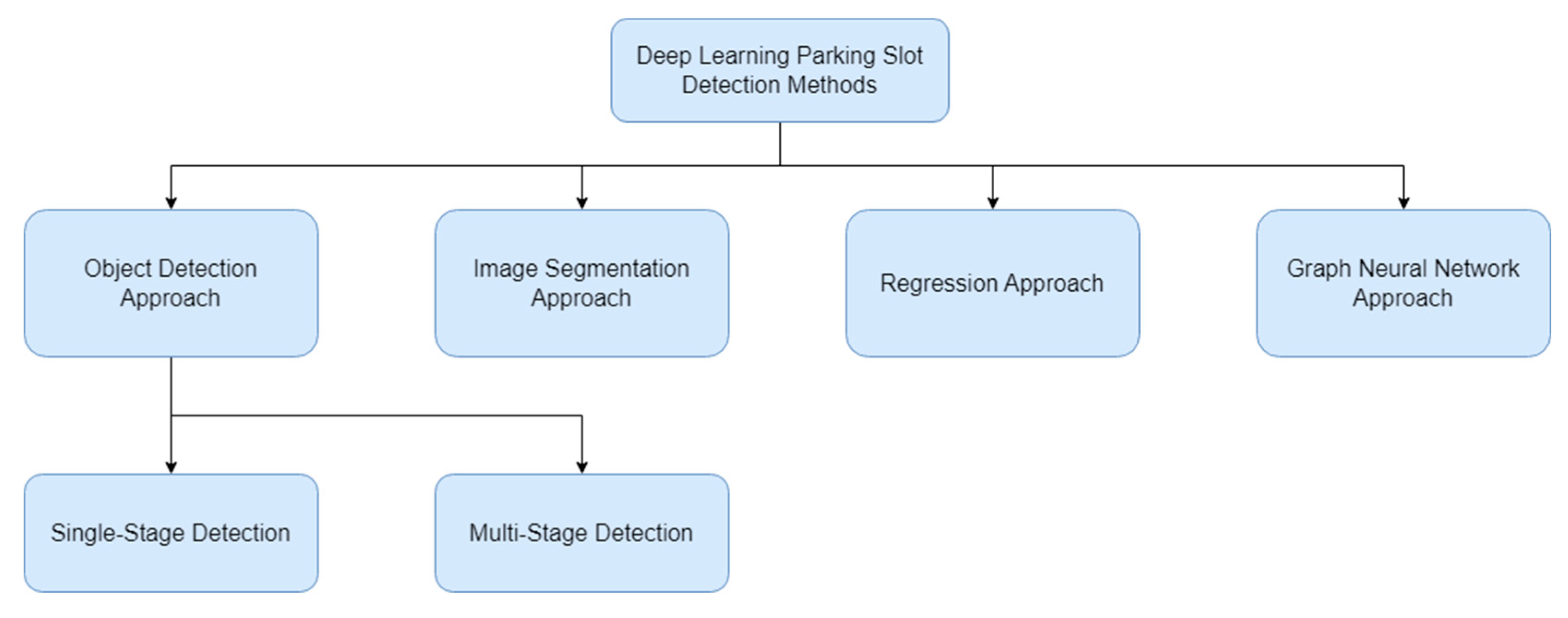
- Categorization of Methodologies: The survey categorizes the techniques based on their primary methodologies, which include object detection, image segmentation, regression, and graph neural networks. Notably, this study is the first systematic survey in the domain that includes graph neural networks for parking slot detection. This comprehensive review paper facilitates the comparison and evaluation of these methods.
- Addressing Research Gaps and Guiding Future Exploration: Our paper not only presents an overview of existing literature but also identifies research gaps in the field of parking slot detection. It offers valuable directions for future researchers to identify and explore these gaps, thereby contributing to the advancement of the domain.
3. Deep Learning Parking Slot Detection Methods
3.1. Object Detection Approach
3.1.1. Single-Stage Detection
- The Yolo v3 input resolution has been reduced to 288 × 288 to detect the parking slot or car in the images. Due to the size of parking slots and cars being relatively large in the image, reducing the input resolution could help improve the detecting of the parking slot.
- The momentum value in the optimizer has been increased to 0.92 to have better stability and avoid local minima.
- The weight decay or regularization parameter has been increased to 0.0015 from 0.0005 to handle overfit during the training process.
- The batch size has been increased to an optimal value of 160 to have a better convergence during the gradient descent, yet it does not consume much computation memory.
- The data augmentation crop value has been set at 0.2 to increase the number of data and reduce overfitting.
- The IOU threshold has been set to 0.7 after multiple trials which will obtain the best accuracy.
3.1.2. Multi-Stage Detection
- right-angled anticlockwise;
- slanted anticlockwise with an acute parking angle;
- slanted anticlockwise with an obtuse parking angle;
- right-angled clockwise;
- slanted clockwise with an obtuse parking angle;
- slanted clockwise with an acute parking angle;
- invalid.
3.2. Image Segmentation Approach
- Morphological skeletonization is applied to extract the central path of each segmented area;
- A Hough line transform on the skeleton is added to generate necessary lines;
- Similar lines are partitioned and merged to build up the parking slots and lanes.
3.3. Regression Approach
3.4. Graph Neural Network Approach
4. Discussion
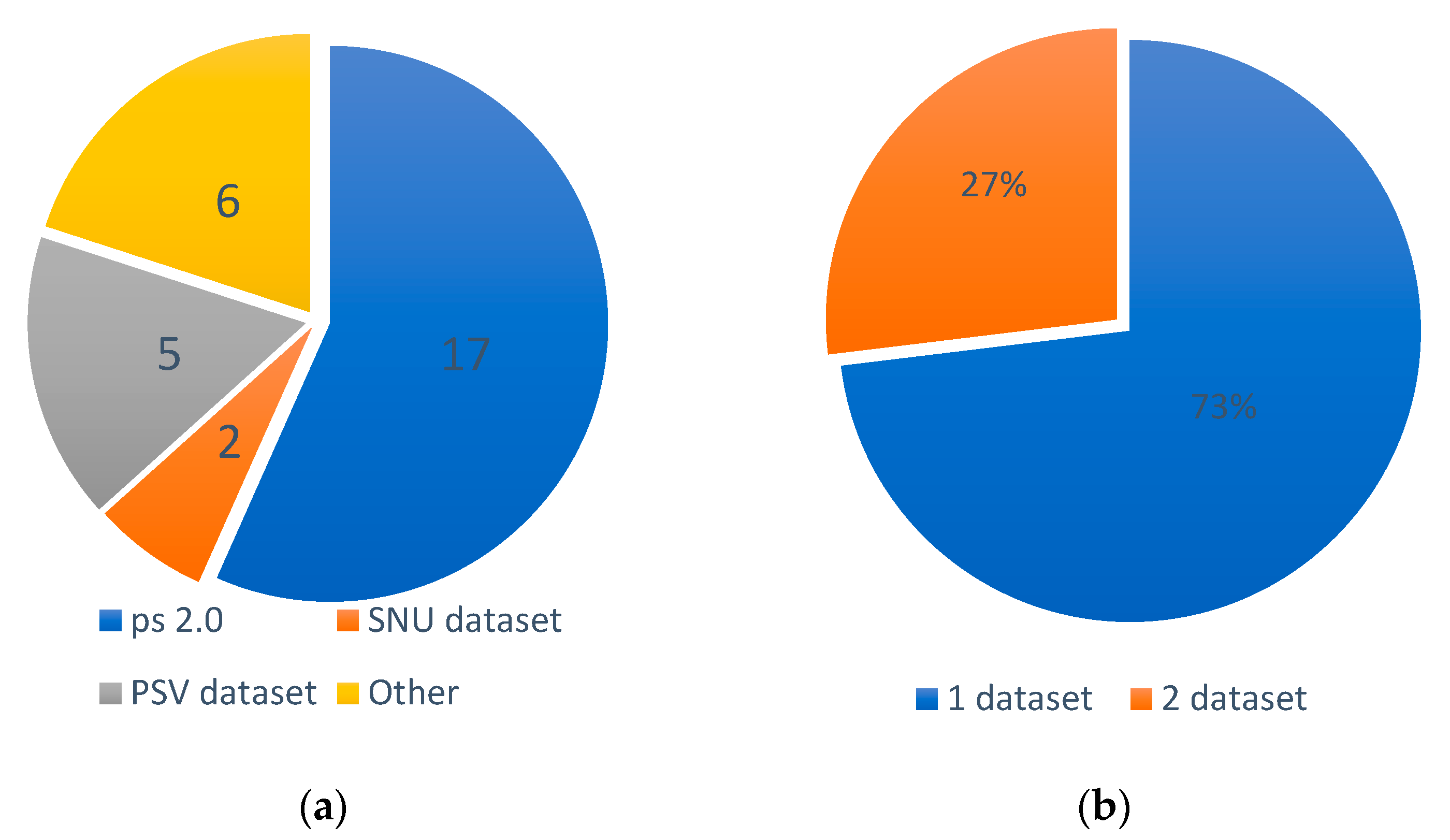
4.1. Dataset
4.1.1. ps 2.0
4.1.2. PSV Dataset
4.1.3. SNU Dataset
4.2. Parking Slot Detection Methods Comparison and Discussion
5. Conclusions and Future Works
- Establishing a more challenging and complete dataset.
- 2.
- Optimizing the algorithm to run on an embedded system.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, J.; Zhang, B.; Yuan, X.; Lian, C.; Ji, L.; Zhang, Q.; Yue, J. YOLO-CIR: The Network Based on YOLO and ConvNeXt for Infrared Object Detection. Infrared Phys. Technol. 2023, 131, 104703. [Google Scholar] [CrossRef]
- Zhang, S.; Rao, P.; Zhang, H.; Chen, X.; Hu, T. Spatial Infrared Objects Discrimination Based on Multi-Channel CNN with Attention Mechanism. Infrared Phys. Technol. 2023, 132, 104670. [Google Scholar] [CrossRef]
- Chen, S.; Xu, X.; Yang, N.; Chen, X.; Du, F.; Ding, S.; Gao, W. R-Net: A Novel Fully Convolutional Network–Based Infrared Image Segmentation Method for Intelligent Human Behavior Analysis. Infrared Phys. Technol. 2022, 123, 104164. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, J.; Li, X.; Xiong, L. Vision-Based Parking-Slot Detection: A DCNN-Based Approach and a Large-Scale Benchmark Dataset. IEEE Trans. Image Process. 2018, 27, 5350–5364. [Google Scholar] [CrossRef]
- Zinelli, A.; Musto, L.; Pizzati, F. A Deep-Learning Approach for Parking Slot Detection on Surround-View Images. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 683–688. [Google Scholar]
- Do, H.; Choi, J.Y. Context-Based Parking Slot Detection with a Realistic Dataset. IEEE Access 2020, 8, 171551–171559. [Google Scholar] [CrossRef]
- Li, W.; Cao, L.; Yan, L.; Li, C.; Feng, X.; Zhao, P. Vacant Parking Slot Detection in the Around View Image Based on Deep Learning. Sensors 2020, 20, 2138. [Google Scholar] [CrossRef]
- Wu, Z.; Sun, W.; Wang, M.; Wang, X.; Ding, L.; Wang, F. PSDet: Efficient and Universal Parking Slot Detection 2020. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 23–23 June 2020; pp. 290–297. [Google Scholar]
- Xu, C.; Hu, X. Real Time Detection Algorithm of Parking Slot Based on Deep Learning and Fisheye Image. J. Phys. Conf. Ser. 2020, 1518, 012037. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J.; Sheng, B.; Li, P.; Wu, E. GPSD: Generative Parking Spot Detection Using Multi-Clue Recovery Model. Vis. Comput. 2021, 37, 2657–2669. [Google Scholar] [CrossRef]
- Xie, Z.; Wei, X. Automatic Parking Space Detection System Based on Improved YOLO Algorithm. In Proceedings of the 2021 2nd International Conference on Computer Science and Management Technology (ICCSMT), Shanghai, China, 12–14 November 2021; pp. 279–285. [Google Scholar]
- Huang, C.; Yang, S.; Luo, Y.; Wang, Y.; Liu, Z. Visual Detection and Image Processing of Parking Space Based on Deep Learning. Sensors 2022, 22, 6672. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. End-to-End Trainable One-Stage Parking Slot Detection Integrating Global and Local Information. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4570–4582. [Google Scholar] [CrossRef]
- Wang, Y.; Guan, Y.; Cao, R. DetPS: A Fully Convolutional End-to-End Parking Slot Detector. In Proceedings of the 2022 IEEE 17th Conference on Industrial Electronics and Applications (ICIEA), Chengdu, China, 16 December 2022; pp. 1051–1056. [Google Scholar]
- Zheng, R.; Lian, S.; Liang, W.; Tang, Y.; Meng, W. Center Keypoint for Parking Slot Detection with Self-Calibrated Convolutions Network. In Proceedings of the 2022 17th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 11 December 2022; pp. 305–310. [Google Scholar]
- Bui, Q.H.; Suhr, J.K. CNN-Based Two-Stage Parking Slot Detection Using Region-Specific Multi-Scale Feature Extraction. IEEE Access 2023, 11, 58491–58505. [Google Scholar] [CrossRef]
- Lee, J.; Sung, K.; Park, D.; Jeon, Y. KEPS-NET: Robust Parking Slot Detection Based Keypoint Estimation for High Localization Accuracy. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4 June 2023; pp. 1–5. [Google Scholar]
- Bui, Q.H.; Suhr, J.K. One-Stage Parking Slot Detection Using Component Linkage and Progressive Assembly. IEEE Intell. Transp. Syst. Mag. 2023, 2–17, early access. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, T.; Zhao, J.; Guan, L.; Jiang, W. VH-HFCN Based Parking Slot and Lane Markings Segmentation on Panoramic Surround View. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1767–1772. [Google Scholar]
- Jang, C.; Sunwoo, M. Semantic Segmentation-Based Parking Space Detection with Standalone around View Monitoring System. Mach. Vis. Appl. 2019, 30, 309–319. [Google Scholar] [CrossRef]
- Jiang, W.; Wu, Y.; Guan, L.; Zhao, J. DFNet: Semantic Segmentation on Panoramic Images with Dynamic Loss Weights and Residual Fusion Block. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5887–5892. [Google Scholar]
- Jian, D.-H.; Lin, C.-H. Vision-Based Parking Slot Detection Based on End-to-End Semantic Segmentation Training. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; pp. 1–4. [Google Scholar]
- Jiang, S.; Jiang, H.; Ma, S.; Jiang, Z. Detection of Parking Slots Based on Mask R-CNN. Appl. Sci. 2020, 10, 4295. [Google Scholar] [CrossRef]
- Yu, Z.; Gao, Z.; Chen, H.; Huang, Y. SPFCN: Select and Prune the Fully Convolutional Networks for Real-Time Parking Slot Detection. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October 2020; pp. 445–450. [Google Scholar]
- Lai, C.; Yang, Q.; Guo, Y.; Bai, F.; Sun, H. Semantic Segmentation of Panoramic Images for Real-Time Parking Slot Detection. Remote Sens. 2022, 14, 3874. [Google Scholar] [CrossRef]
- Zhou, S.; Yin, D.; Lu, Y. PASSIM: Parking Slot Recognition Using Attentional Semantic Segmentation and Instance Matching. In Proceedings of the 2022 IEEE 5th International Conference on Big Data and Artificial Intelligence (BDAI), Fuzhou, China, 8 July 2022; pp. 169–175. [Google Scholar]
- Huang, J.; Zhang, L.; Shen, Y.; Zhang, H.; Zhao, S.; Yang, Y. DMPR-PS: A Novel Approach for Parking-Slot Detection Using Directional Marking-Point Regression. In Proceedings of the 2019 IEEE International Conference on Multimedia and Expo (ICME), Shanghai, China, 8–12 July 2019; pp. 212–217. [Google Scholar]
- Li, W.; Cao, H.; Liao, J.; Xia, J.; Cao, L.; Knoll, A. Parking Slot Detection on Around-View Images Using DCNN. Front. Neurorobot. 2020, 14, 46. [Google Scholar] [CrossRef] [PubMed]
- Min, C.; Xu, J.; Xiao, L.; Zhao, D.; Nie, Y.; Dai, B. Attentional Graph Neural Network for Parking-Slot Detection. IEEE Robot. Autom. Lett. 2021, 6, 3445–3450. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, H.; Yang, M.; Wang, X.; Ye, L.; Guo, C. Automatic Parking Based on a Bird’s Eye View Vision System. Adv. Mech. Eng. 2014, 6, 847406. [Google Scholar] [CrossRef]
- Lee, S.; Hyeon, D.; Park, G.; Baek, I.; Kim, S.-W.; Seo, S.-W. Directional-DBSCAN: Parking-Slot Detection Using a Clustering Method in around-View Monitoring System. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; pp. 349–354. [Google Scholar]
- Ma, Y.; Liu, Y.; Zhang, L.; Cao, Y.; Guo, S.; Li, H. Research Review on Parking Space Detection Method. Symmetry 2021, 13, 128. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, Y.; Shao, S.; Zhao, J.; Tang, J. Review of Research on Vision-Based Parking Space Detection Method. Int. J. Web Serv. Res. 2022, 19, 1–25. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. Survey of Target Parking Position Designation for Automatic Parking Systems. Int. J. Automot. Technol. 2023, 24, 287–303. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module 2018. arXiv 2018, arXiv:1807.06521. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection 2019. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 9627–9636. [Google Scholar]
- Zhou, X.; Wang, D.; Krähenbühl, P. Objects as Points 2019. arXiv 2019, arXiv:1904.07850. [Google Scholar]
- Mousavian, A.; Anguelov, D.; Flynn, J.; Kosecka, J. 3D Bounding Box Estimation Using Deep Learning and Geometry 2017. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7074–7082. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | Year | Publication Source | Main Approaches |
|---|---|---|---|
| Zhang et al. [4] | 2018 | IEEE | Object Detection |
| Zinelli et al. [5] | 2019 | IEEE | |
| Do and Choi [6] | 2020 | IEEE | |
| Li et al. [7] | 2020 | MDPI | |
| Wu et al. [8] | 2020 | arXiv | |
| Xu and Hu [9] | 2020 | IOP | |
| Chen et al. [10] | 2021 | Springer | |
| Xie and Wei [11] | 2021 | IEEE | |
| Huang et al. [12] | 2022 | MDPI | |
| Suhr and Jung [13] | 2022 | IEEE | |
| Wang et al. [14] | 2022 | IEEE | |
| Zheng et al. [15] | 2022 | IEEE | |
| Bui and Suhr [16] | 2023 | IEEE | |
| Lee et al. [17] | 2023 | IEEE | |
| Bui and Suhr [18] | 2023 | IEEE | |
| Wu et al. [19] | 2018 | IEEE | Image Segmentation |
| Jang and Sunwoo [20] | 2019 | Springer | |
| Jiang et al. [21] | 2019 | IEEE | |
| Jian and Lin [22] | 2020 | IEEE | |
| Jiang et al. [23] | 2020 | MDPI | |
| Yu et al. [24] | 2020 | IEEE | |
| Lai et al. [25] | 2022 | MDPI | |
| Zhou et al. [26] | 2022 | IEEE | |
| Huang et al. [27] | 2019 | IEEE | Regression |
| Li et al. [28] | 2020 | Frontiers | |
| Min et al. [29] | 2021 | IEEE | Graph Neural Network |
| Dataset | Resolution | Camera View | Training | Validation | Testing | Total |
|---|---|---|---|---|---|---|
| ps 2.0 | 600 × 600 | Stitched Bird-eye view | 9827 | - | 2338 | 12,165 |
| PSV | 640 × 480 | Stitched Bird-eye view | 2550 | 425 | 1274 | 4249 |
| SNU | 768 × 256 | Vehicle side view | 18,299 | - | 4518 | 22,817 |
| Approach | Literature | Vacancy Detection | Core Architecture | Precision | Recall | FPS | Dataset Split | Hardware |
|---|---|---|---|---|---|---|---|---|
| Object Detection | Zhang et al. [4] | No | Yolo v2 | 99.54% | 98.89% | 43 | Default | Intel Xeon E5-2630V3 CPU, Nvidia Titan X |
| Do and Choi [6] | Yes | MobileNet v2 + Yolo v3 | 98.70% | 97.88% | 23 | Default | Intel i7-7700, GTX 1080 | |
| Li et al. [7] | Yes | Yolo v3 + AlexNet | 99.63% | 99.10% | 50 | Default | Intel i9-7900X, 2× Nvidia Titan Xp | |
| Wu et al. [8] | No | Custom CNN | 98.35% | 99.60% | 101 | Default | Qualcomm 820a | |
| Chen et al. [10] | No | Custom CNN | 93.21% | 96.84% | - | Default | - | |
| Suhr and Jung [13] | Yes | VGG16 + Custom CNN | 99.77% | 99.77% | 60 | Default | GTX 1080 Ti | |
| Wang et al. [14] | No | FCOS | 99.08% | 99.40% | - | Default | - | |
| Zheng et al. [15] | Yes | SCCN | 99.35% | 99.17% | - | Default | RTX 2080 Ti | |
| Bui and Suhr [16] | Yes | Region Proposal Network (RPN) | 99.77% | 99.77% | 45 | Default | RTX 3090 | |
| Lee et al. [17] | No | CenterNet | 99.72% | 99.63% | - | Default | - | |
| Bui and Suhr [18] | Yes | Custom CNN | 99.63% | 99.63% | 134 | Default | RTX 3090 | |
| Image Segmentation | Jian and Lin [22] | No | U-Net | 99.40% | 92.95% | - | Segmentation Labeled Test Set | - |
| Yu et al. [24] | No | Stacked Hourglass | 98.26% | 97.56% | 150 | Segmentation Labeled Test Set | GPU (Not specified) | |
| Zhou et al. [26] | No | Attentional Encoder–Decoder Network | 99.03% | 98.57% | 40 | Segmentation Labeled Test Set | Nvidia P100 | |
| Regression | Huang et al. [27] | No | Custom CNN | 99.42% | 99.37% | 83 | Default | Nvidia Titan Xp |
| Li et al. [28] | No | Custom CNN | 99.68% | 99.41% | 77 | Default | Intel i9-7900X, 2× Nvidia Titan Xp | |
| Graph Neural Network | Min et al. [29] | No | VGG16 + GNN | 99.56% | 99.42% | 40 | Default | Nvidia Titan Xp |
| Approach | Literature | Vacancy Detection | Core Architecture | Precision | Recall | mIOU | FPS | Dataset Split | Hardware |
|---|---|---|---|---|---|---|---|---|---|
| Object Detection | Li et al. [7] | Yes | Yolo v3 + AlexNet | 96.54% | 94.60% | - | 50 | Default | Intel i9-7900X, 2× Nvidia Titan Xp |
| Suhr and Jung [13] | Yes | VGG16 + Custom CNN | 96.33% | 94.39% | - | 60 | Default | GTX 1080 Ti | |
| Image Segmentation | Jiang et al. [23] | No | Mask R-CNN + Line Segment Detector | - | - | 66.53 | 3 | Default | Nvidia Titan X |
| Wu et al. [19] | No | HFCN | - | - | 46.51 | 9 | Default | Nvidia Titan X | |
| Lai et al. [25] | No | ResNet50 + Attention Module | - | - | 67.97 | 33 | Default | Nvidia Titan Xp | |
| Graph Neural Network | Min et al. [29] | No | VGG16 + GNN | 97.05% | 90.70% | - | 40 | Default | Nvidia Titan Xp |
| Approach | Literature | Vacancy Detection | Core Architecture | Precision | Recall | FPS | Dataset Split | Hardware |
|---|---|---|---|---|---|---|---|---|
| Object Detection | Do and Choi [6] | Yes | MobileNet v2 + Yolo v3 | 87.75% | 88.52% | 23 | Default | Intel i7-7700, GTX 1080 |
| Bui and Suhr [16] | Yes | Region Proposal Network (RPN) | 95.78% | 95.75% | 45 | Default | RTX 3090 | |
| Bui and Suhr [19] | Yes | Custom CNN | 96.75% | 96.73% | 134 | Default | RTX 3090 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wong, G.S.; Goh, K.O.M.; Tee, C.; Md. Sabri, A.Q. Review of Vision-Based Deep Learning Parking Slot Detection on Surround View Images. Sensors 2023, 23, 6869. https://doi.org/10.3390/s23156869
Wong GS, Goh KOM, Tee C, Md. Sabri AQ. Review of Vision-Based Deep Learning Parking Slot Detection on Surround View Images. Sensors. 2023; 23(15):6869. https://doi.org/10.3390/s23156869
Chicago/Turabian StyleWong, Guan Sheng, Kah Ong Michael Goh, Connie Tee, and Aznul Qalid Md. Sabri. 2023. "Review of Vision-Based Deep Learning Parking Slot Detection on Surround View Images" Sensors 23, no. 15: 6869. https://doi.org/10.3390/s23156869
APA StyleWong, G. S., Goh, K. O. M., Tee, C., & Md. Sabri, A. Q. (2023). Review of Vision-Based Deep Learning Parking Slot Detection on Surround View Images. Sensors, 23(15), 6869. https://doi.org/10.3390/s23156869