

Next-Generation Pedal: Integration of Sensors in a Braking Pedal for a Full Brake-by-Wire System


Abstract
1. Introduction
2. State of the Art
3. Methodology
4. BATZ’s Next-Generation Pedal
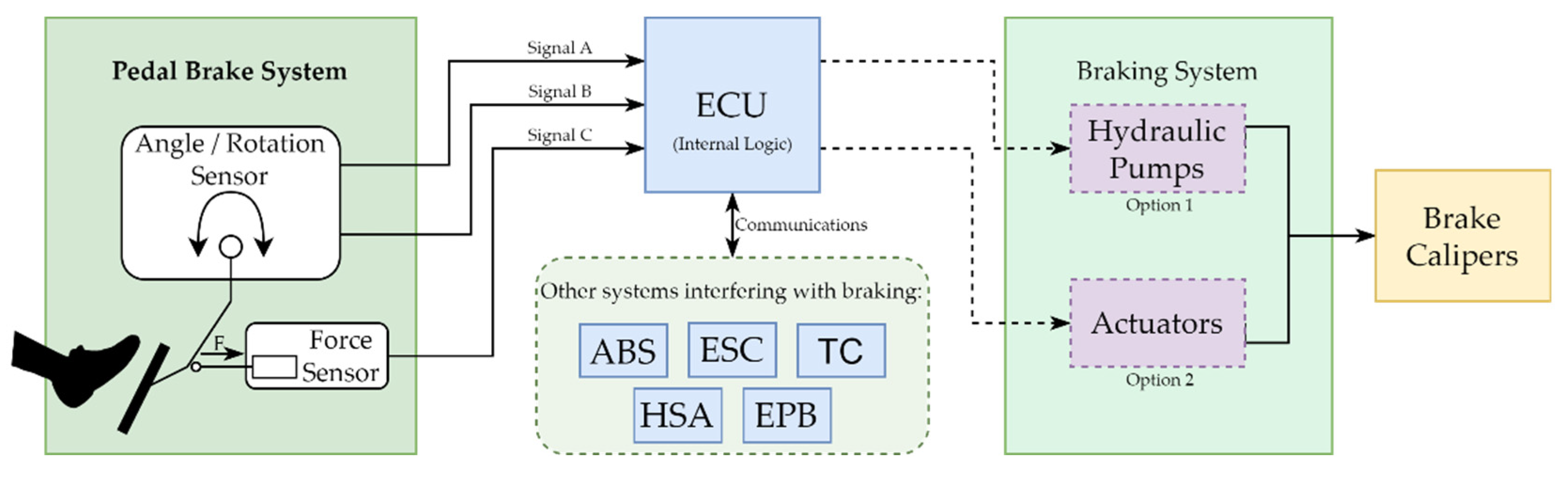
4.1. System Definition
4.2. Brake-by-Wire: The Mechatronic Pedal
4.2.1. Angle/Travelling Sensor
4.2.2. Force Sensor
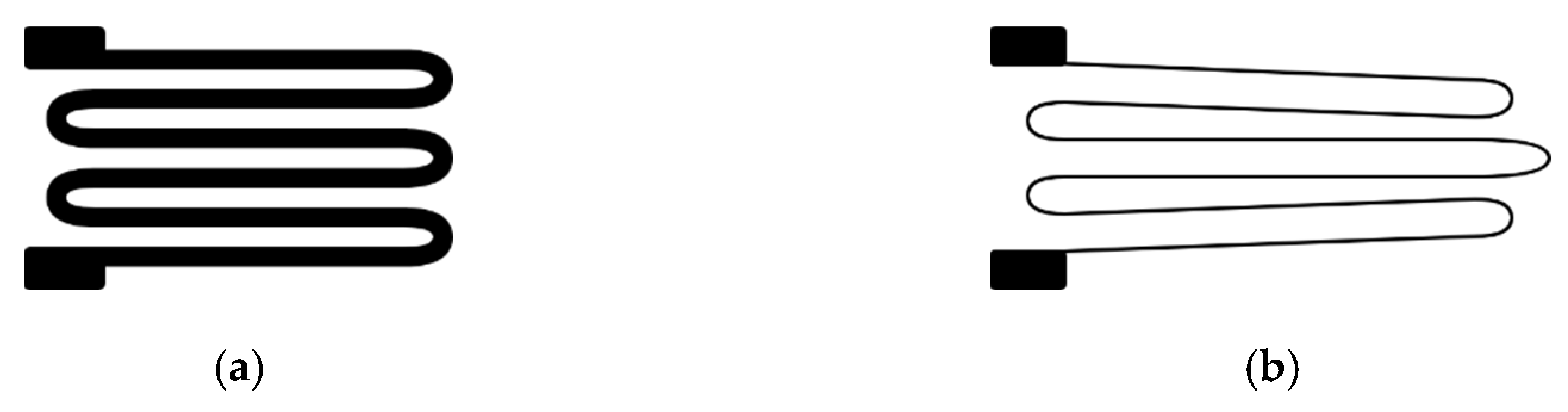
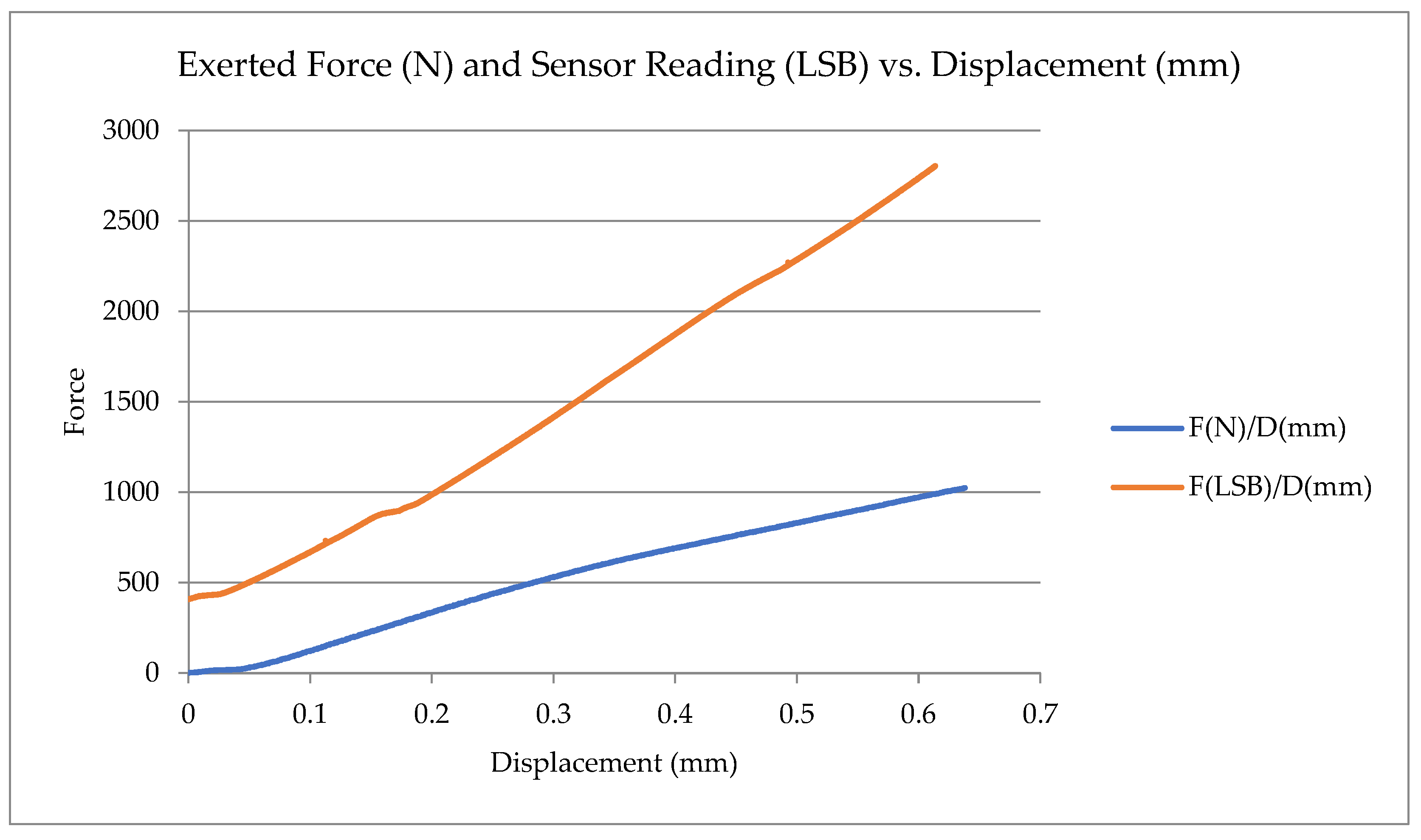
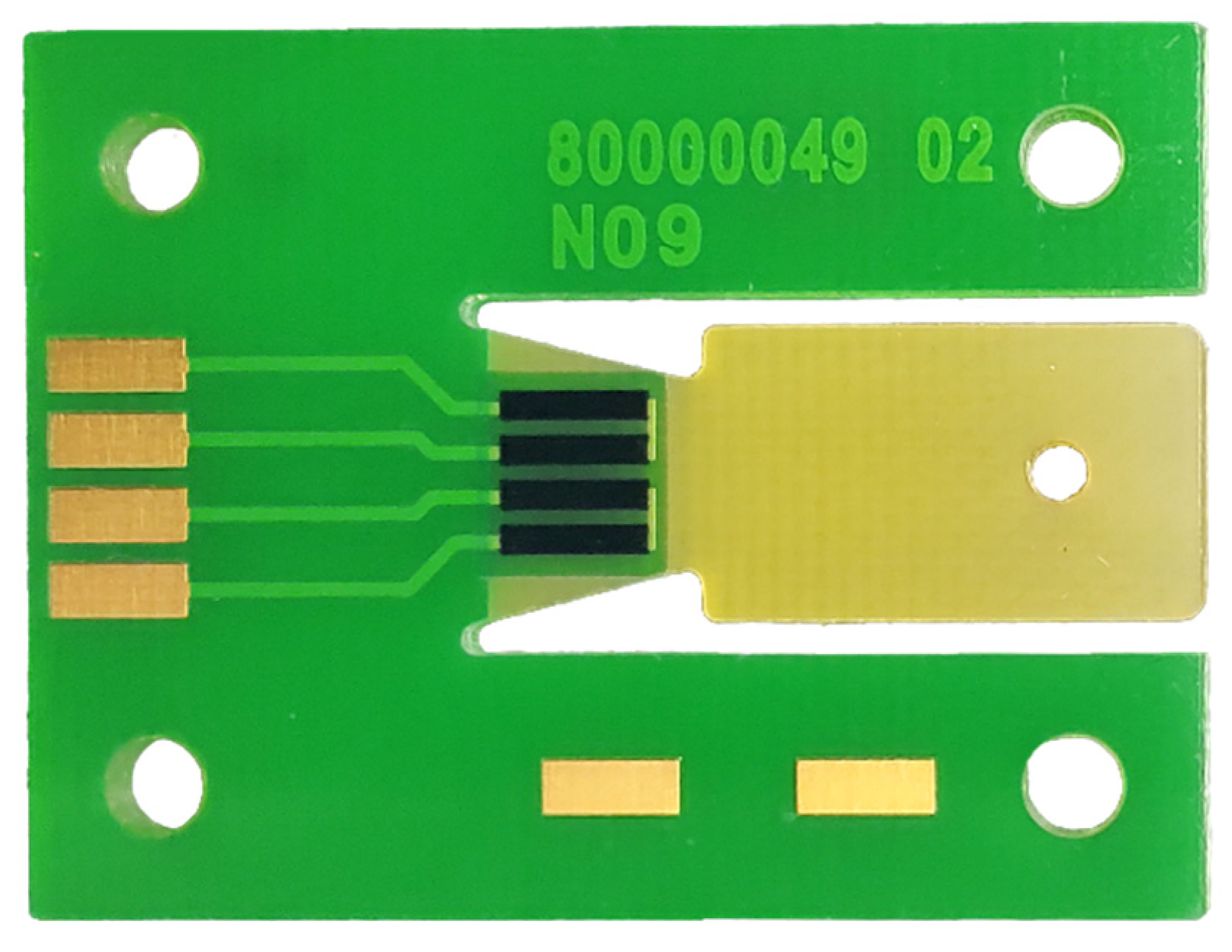
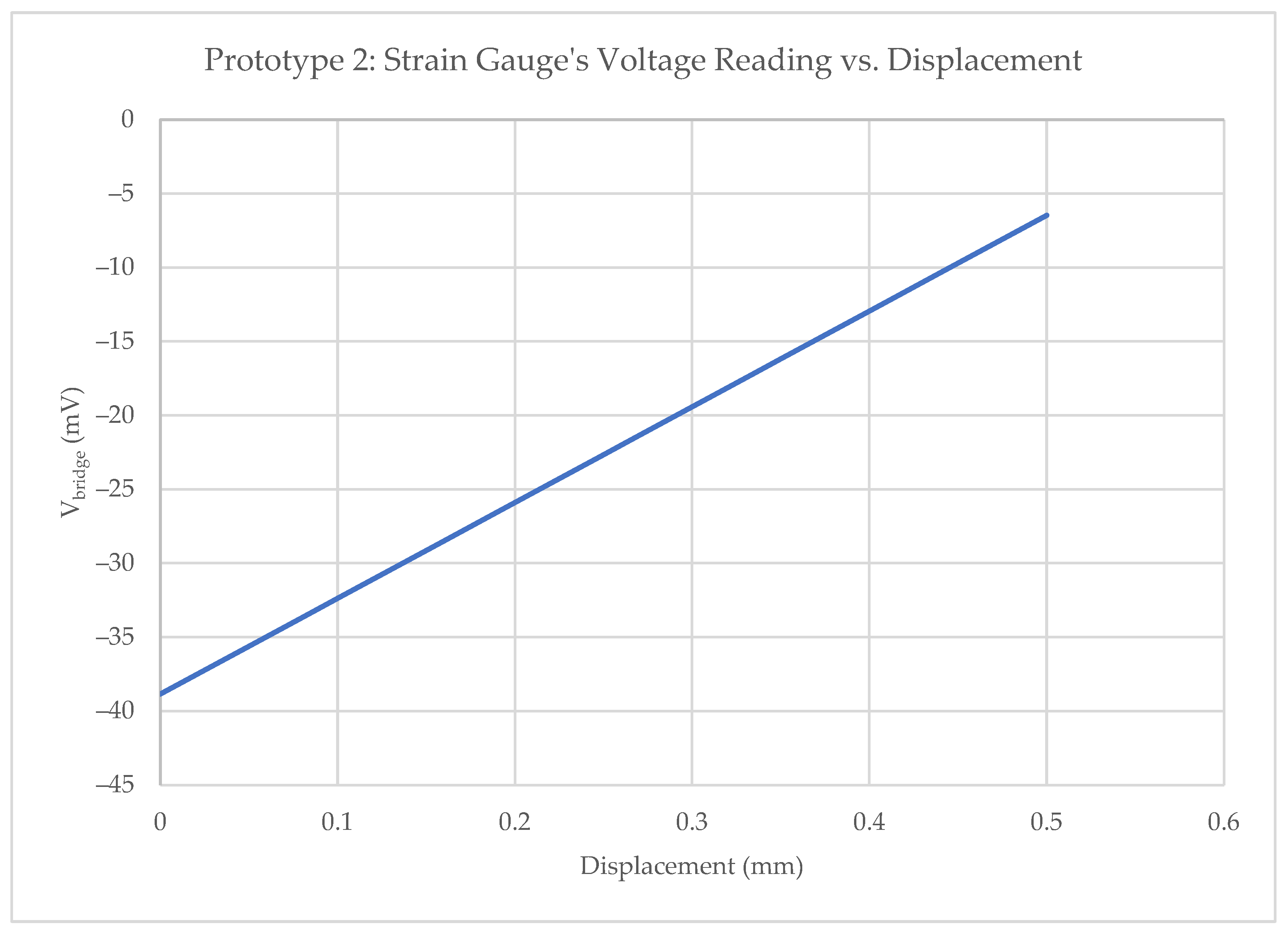
4.2.3. Strain Gauges
4.2.4. Other Technologies
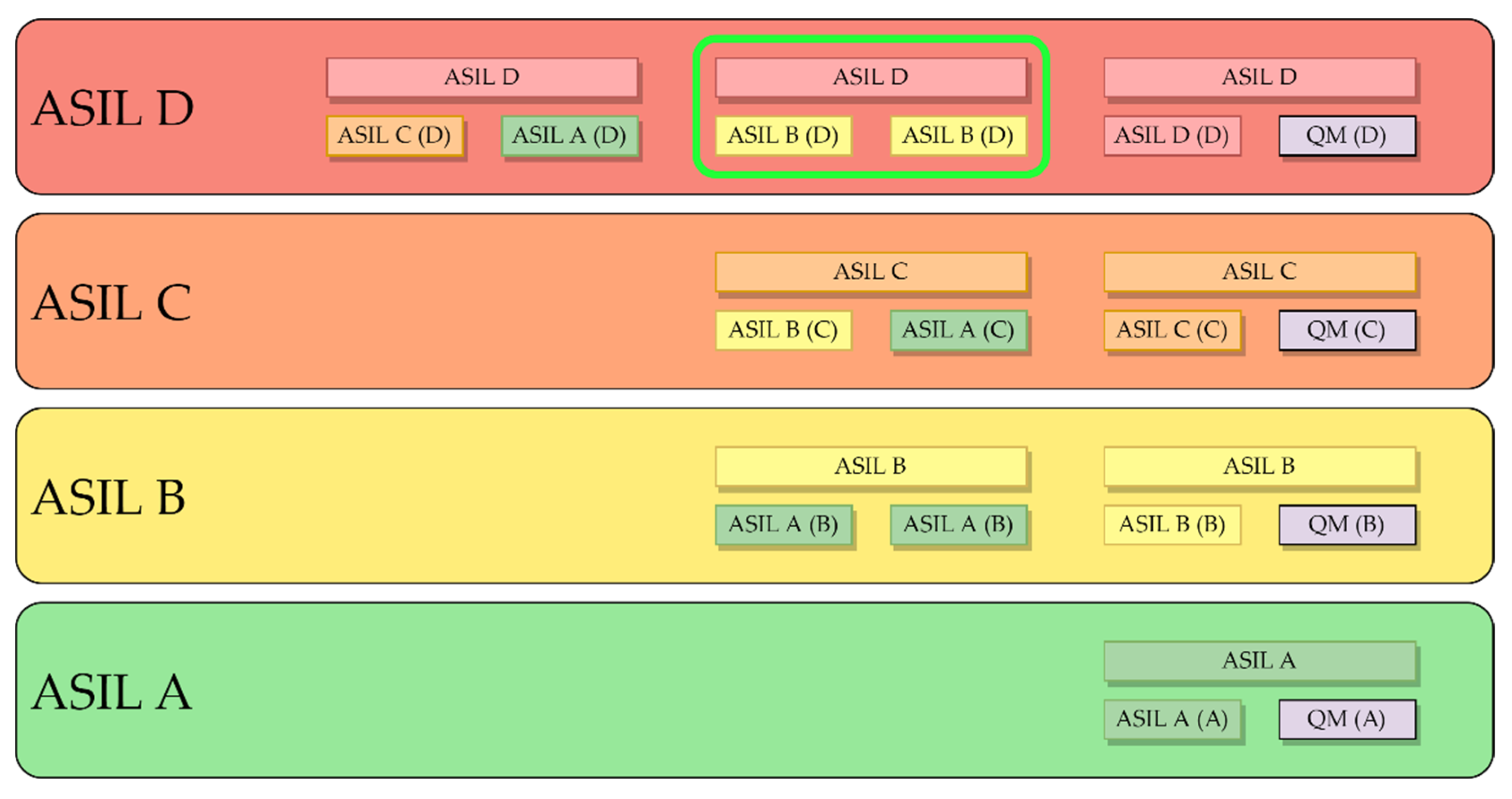
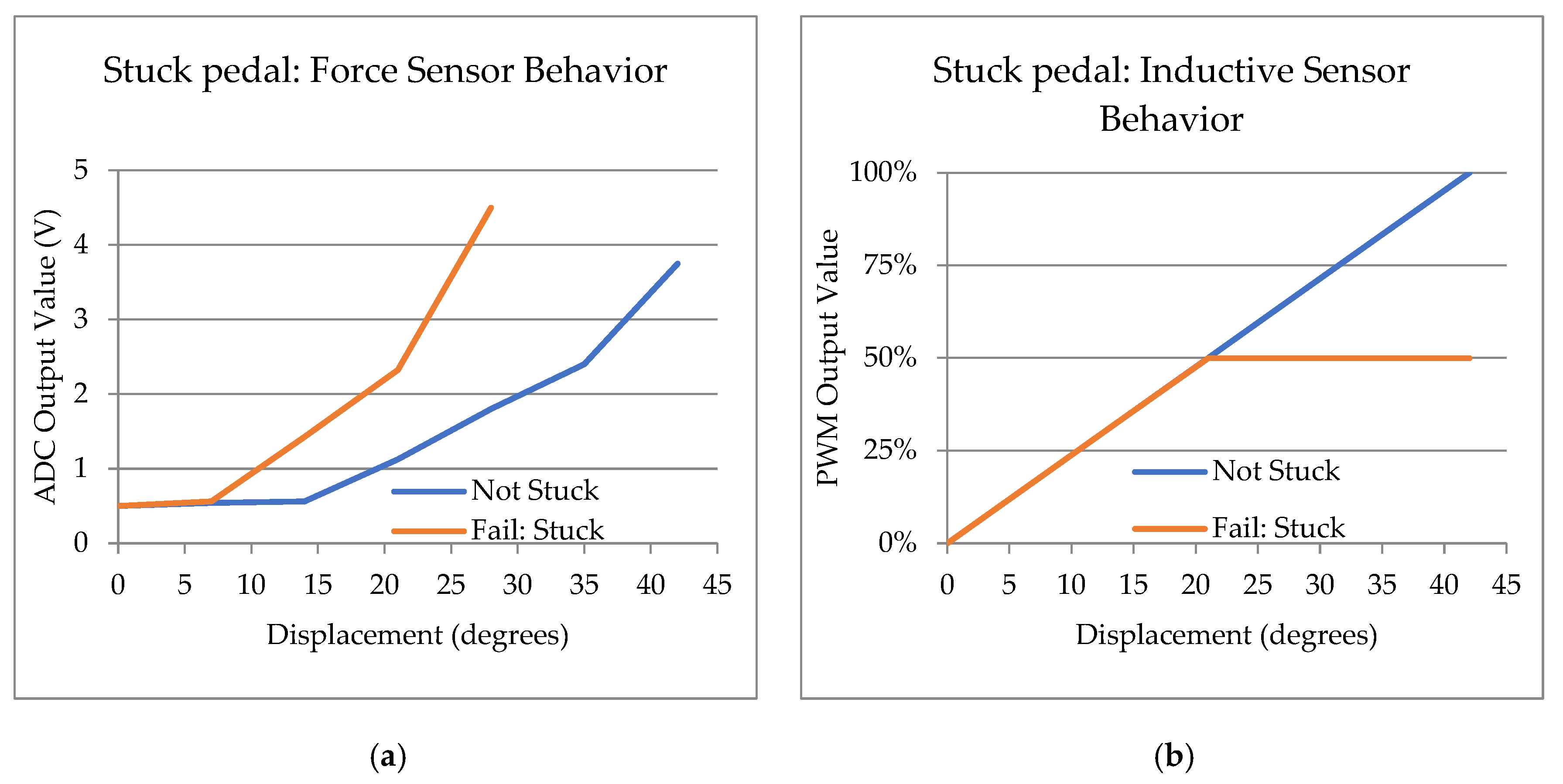
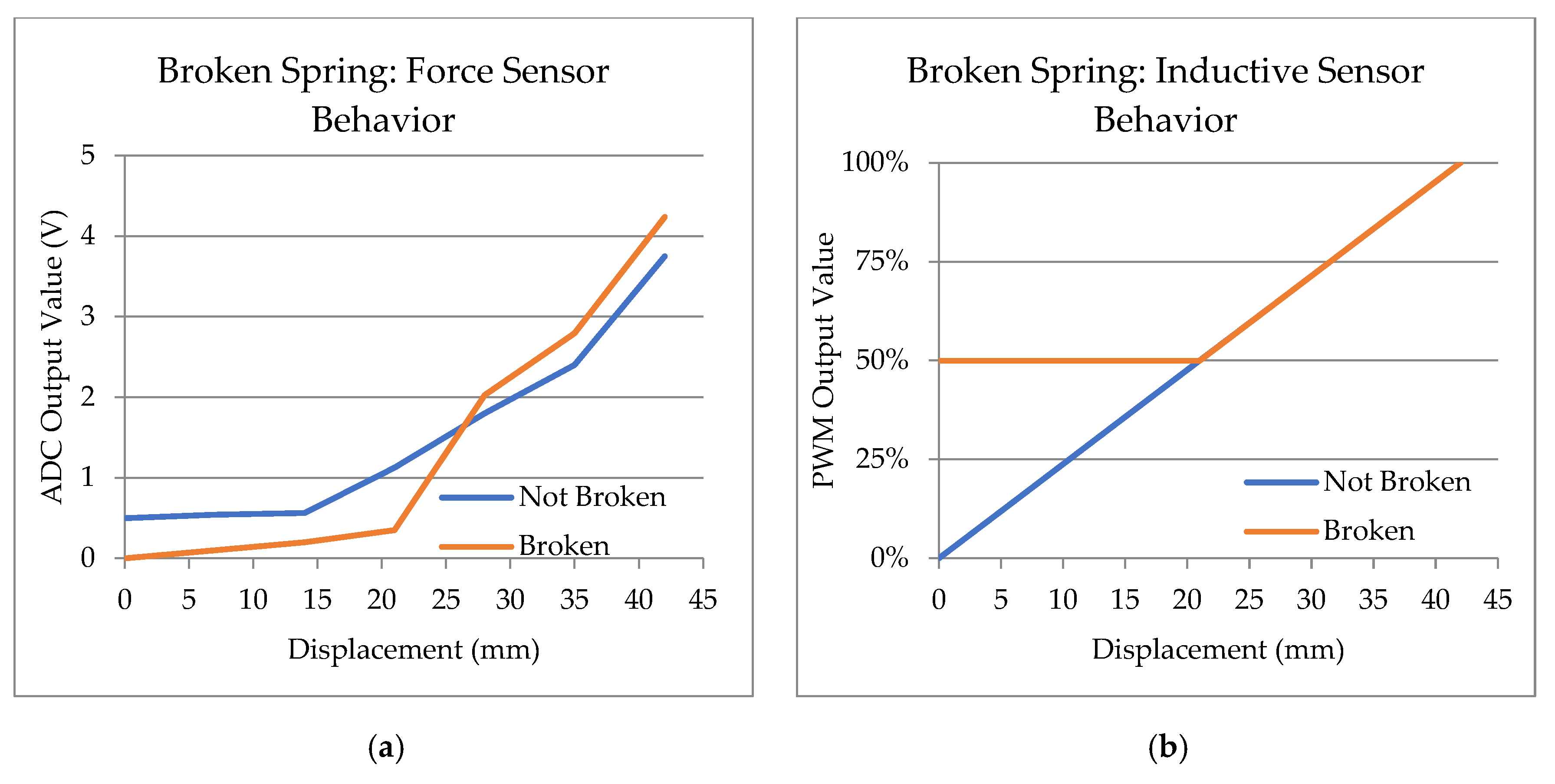
4.2.5. Functional Safety
4.3. Envisioning the Future
5. Conclusions
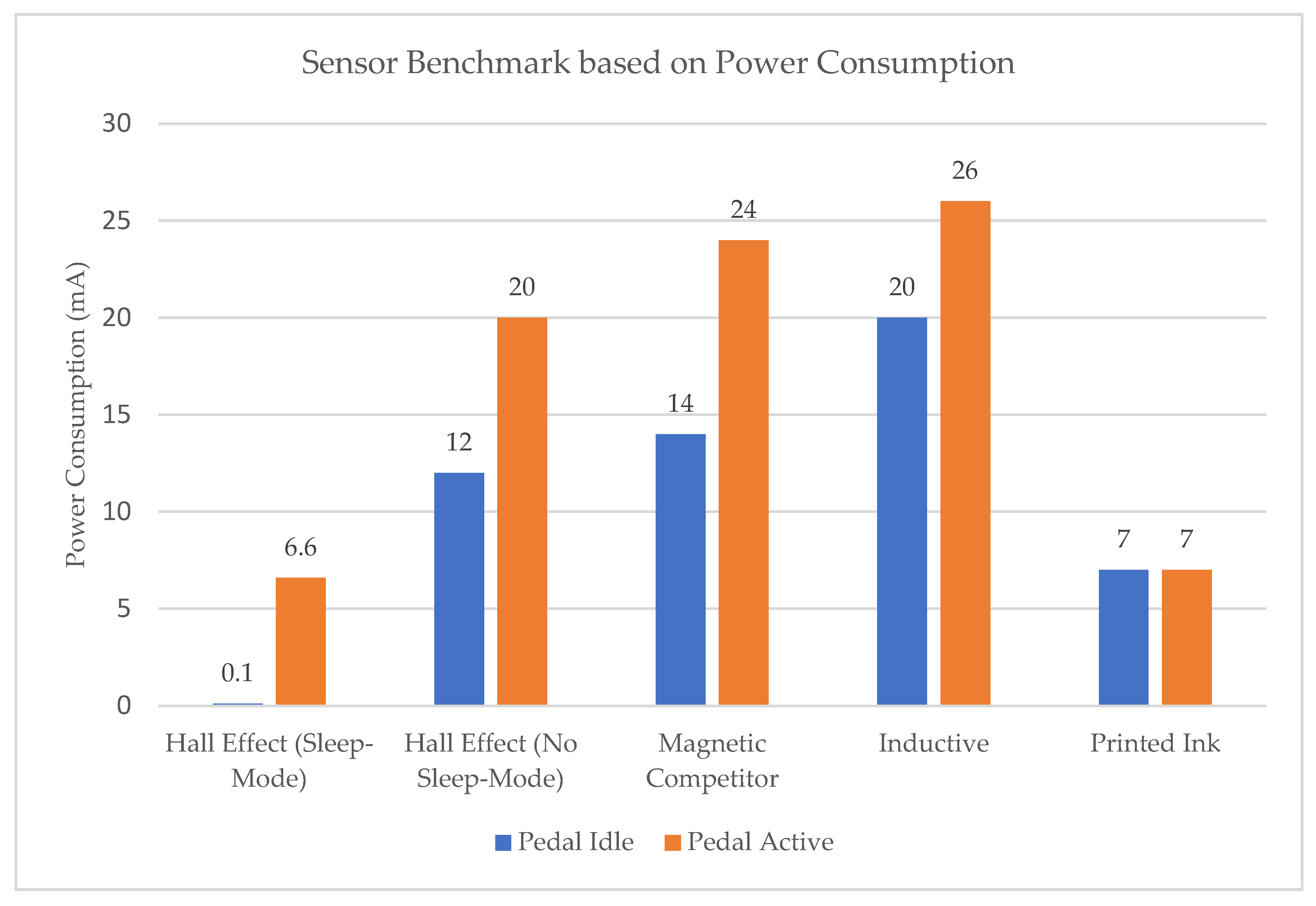
- Sensors: Multiple prototypes of a new inductive angle sensor have been successfully produced, and the magnetic sensor has undergone improvements, including a low-power consumption sleep mode rated at 0.1 mA. Printed-ink strain gauge technology was investigated to optimize cost-effectiveness without sacrificing accuracy and dependability, and several prototypes were manufactured. The study focused on the resistivity dispersion of printed inks deposited on PCBs and their linearity. Despite a high resistivity dispersion among the samples, exceptional linearity was observed.
- Feel simulator: The OEMs have expressed their preferences for the force curve with respect to the user’s pedal stroke in the feel simulator. Two systems that satisfy the desired curve have been suggested and can be adjusted either passively or actively.
- Shape-memory alloy: The investigation indicates that utilizing SMA wire for the actively adjustable brake pedal produced favorable results. Through an electronic control system, it becomes a customizable feel simulator, which allows the driver to select from three distinct pedal stiffness levels when braking. While the functionality tests demonstrated satisfactory results, concerns have been raised regarding the suitability of these materials for the automotive industry. Despite the effectiveness of this solution, it must meet the strict requirements that the automotive sector demands.
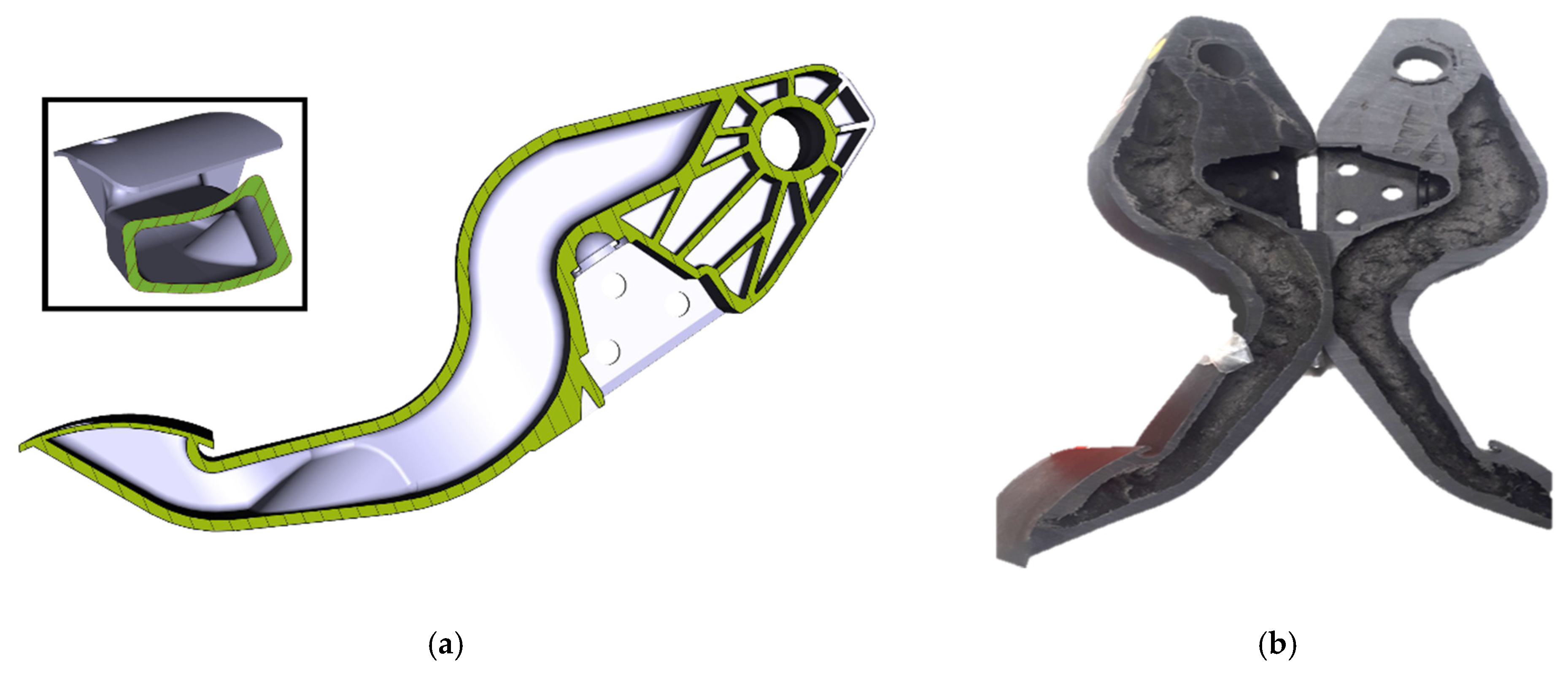
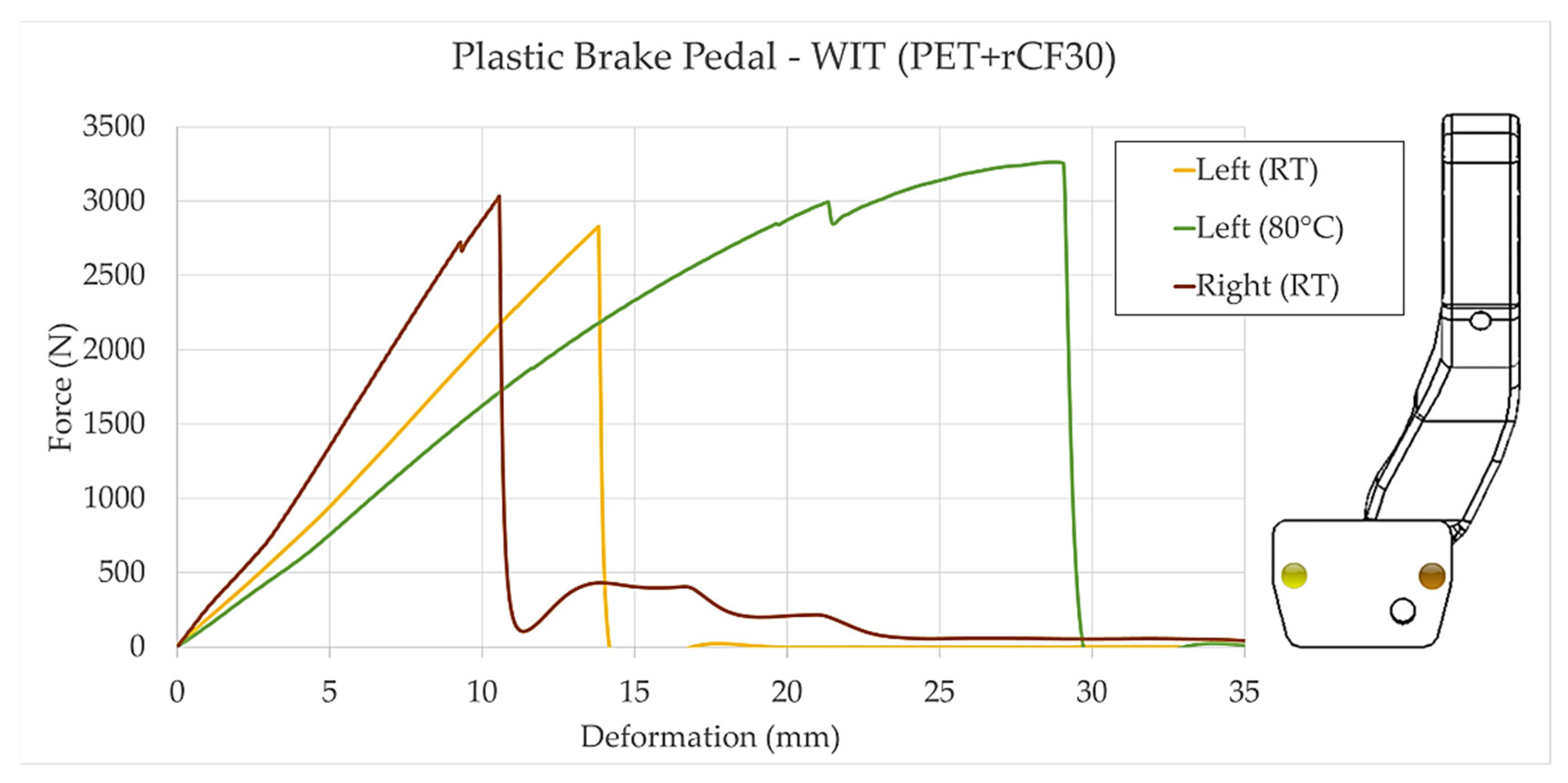
- Water injection technique: The WIT technique has expanded its range of uses to brake pedals, producing eco-friendly pedals that support environmental sustainability. The technology maintains the pedal’s safety and structural integrity while reducing weight, aligning with the industry’s goals of enhancing fuel efficiency and reducing emissions. This novel brake pedal has undergone rigorous tests, achieving the same high standards as conventional metal pedals, including exceptional performance in the collapse test. This research marks a groundbreaking achievement by introducing the first affordable plastic brake pedal manufactured using WIT.
- Retractable pedal: This feature introduces a visionary concept to optimize space utilization within the driver compartment in future autonomous vehicles. This novel solution enhances the overall driving experience by offering the ability to retract the pedals when unused. It aligns with the evolving needs of autonomous driving scenarios and makes trips more comfortable.
- Low travel pedal: Currently, BBW technology is in its early stages of deployment. In response to this development, there are two options available. The first is to maintain the conventional design of the pedal, while the other is to explore new shapes and configurations. The decision will ultimately depend on the OEMs’ innovation level and drivers’ willingness to embrace changes. With BBW architecture, the pedal is no longer bound to a mechanical element, allowing for greater flexibility in its shape and placement. Furthermore, it can streamline the manufacturing process and costs for creating pedals suitable for left-handed driving (LHD) and right-handed driving (RHD). This prototype’s unique design deviates from the traditional pedal shape with low traveling.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Arango, J.F.; Bergasa, L.M.; Revenga, P.A.; Barea, R.; López-Guillén, E.; Gómez-Huélamo, C.; Araluce, J.; Gutiérrez, R. Drive-By-Wire Development Process Based on ROS for an Autonomous Electric Vehicle. Sensors 2020, 20, 6121. [Google Scholar] [CrossRef] [PubMed]
- Kalinowski, J.; Drage, T.; Bräunl, T. Drive-By-Wire for an Autonomous Formula SAE Car. IFAC Proc. Vol. 2014, 47, 8457–8462. [Google Scholar] [CrossRef]
- Pillai, A.V.; Manojkumar, B. Overview of drive by wire technologies in automobiles. AIP Conf. Proc. 2022, 2452, 030001. [Google Scholar] [CrossRef]
- Meurisse, G. Investigation of a New e-Caliper Concept with a Mechanical Backup System; KTH Royal Institute of Technology: Stockholm, Sweden, 2018. [Google Scholar]
- Infiniti Research Limited Global Automotive Brake-by-Wire Systems Market 2023–2027. 2023.
- Quintana, J.A.G.; Alvarez, J.M.; Verde, J.J.; Isasti, L.Z. New generation of automotive mechanical and electronic components: Technological challenges for suppliers. DYNA 2021, 96, 581–585. [Google Scholar] [CrossRef]
- Hassanein, A.; Dawod, N.; Hassan, N. Design and analysis of a new brake-by-wire system using machine learning. Int. J. Electr. Comput. Eng. 2023, 13, 3019–3028. [Google Scholar] [CrossRef]
- Butler, S.W. Enabling a Powerful Decade of Changes [Flyback]. IEEE Power Electron. Mag. 2019, 6, 18–26. [Google Scholar] [CrossRef]
- Honda Honda Confirm Side Camera Mirror System as Standard for Honda e. Available online: https://hondanews.eu/eu/en/cars/media/pressreleases/181246/honda-confirm-side-camera-mirror-system-as-standard-for-honda-e (accessed on 1 June 2021).
- Ulrich, L. Bosch’s Smart Visor Tracks the Sun While You Drive. IEEE Spectrum. 2020. Available online: https://spectrum.ieee.org/boschs-smart-virtual-visor-tracks-sun (accessed on 23 May 2023).
- Zhao, B.; Liu, R.; Shi, D.; Li, S.; Cai, Q.; Shen, W. Optimal Control Strategy of Path Tracking and Braking Energy Recovery for New Energy Vehicles. Processes 2022, 10, 1292. [Google Scholar] [CrossRef]
- Lorenz, K.; Hofmann, R.; Hönnebeck, K. Interactive Engine and Transmission Control. In Proceedings of the International Congress on Transportation Electronics, Dearborn, MI, USA, 16–17 October 1988; pp. 25–31. [Google Scholar] [CrossRef]
- Goyal, A.; Thakur, A. An Overview of Drive by Wire Technology for Automobiles. In Proceedings of the 2019 International Conference on Automation, Computational and Technology Management (ICACTM), London, UK, 24–26 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 108–110. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H.; Huang, H. Fault tolerant steer-by-wire systems: An overview. Annu. Rev. Control 2019, 47, 98–111. [Google Scholar] [CrossRef]
- Holding, K. Brake by Wire (computer controlled braking). In IEE Colloquium on Chassis Electronics; IET: London, UK, 1990; pp. 5/1–5/2. [Google Scholar]
- Singh, M.; Bridgens, B. Design of a Brake by Wire System Using OOA. J. Passeng. Cars 1996, 105, 1376–1381. [Google Scholar]
- Jonner, W.-D.; Winner, H.; Dreilich, L.; Schunck, E. Electrohydraulic Brake System—The First Approach to Brake-By-Wire Technology; SAE: Warrendale, PA, USA, 1996. [Google Scholar] [CrossRef]
- Toyota Motor Corporation. Estima Hybrid-Gleaming Example of Automotive Evolution. Press Release. 2001. Available online: https://global.toyota/en/newsroom/toyota/22749294.html (accessed on 23 May 2023).
- SEAS Brake by Wire or BBW. Available online: https://www.formula1-dictionary.net/brake_by_wire.html (accessed on 15 October 2022).
- MJR Auto Centre Alphard MPV Debuts in Japanese Market. 2020. Available online: https://www.mjrautocentre.com.au/wp-content/uploads/2021/04/ALPHARD-AND-ESTIMA-HYBRID-EXPLAINED.docx (accessed on 23 May 2023).
- Soga, M.; Shimada, M.; Sakamoto, J.-I.; Otomo, A. Development of vehicle dynamics management system for hybrid vehicles: ECB system for improved environmental and vehicle dynamic performance. JSAE Rev. 2002, 23, 459–464. [Google Scholar] [CrossRef]
- Lexus RX400h: A New Driving Experience. Press Release. 2004. Available online: https://media.lexus.co.uk/rx400h-a-new-driving-experience/ (accessed on 23 May 2023).
- Beanard, G. Brake & Frontend. Available online: https://www.brakeandfrontend.com/tech-feature-ford-hybrid-braking/ (accessed on 25 November 2022).
- Toyota Motor Corporation Toyota and Ford Conclude Licensing Agreements for Hybrid System and Emissions Purification Patents. Press Release. 2004. Available online: https://global.toyota/en/detail/1049108 (accessed on 23 May 2023).
- Takle, A.B.; Umale, S.R. Sensotronic Braking System. Int. J. Sci. Res. Dev. 2017, 5, 283–288. [Google Scholar]
- Chew, E. Bosch: Electro-hydraulic brake system. Automotive News Europe. 2000. Available online: https://europe.autonews.com/article/20001106/ANE/11060842/bosch-electro-hydraulic-brake-system (accessed on 23 May 2023).
- Korde, M.; Tayade, H. Sensotronic Brake Control System. Int. J. Res. Appl. Sci. Eng. Technol. 2022, 10, 949–954. [Google Scholar] [CrossRef]
- Atlantic Motorcar Center Mercedes Sensotronic Brake Control (SBC) Faults. Available online: https://atlanticmotorcar.com/casestudies/mercedes-sensotronic-brake-control-sbc-faults-2/ (accessed on 2 September 2022).
- Meiners, J. Mercedes Cancels By-Wire Brake System; Decision a Blow to Technology’s Future. Autoweek. 2005. Available online: https://www.autoweek.com/news/a2084126/mercedes-cancels-wire-brake-system-decision-blow-technologys-future/ (accessed on 23 May 2023).
- Atlantic Motorcar Center Good News—Mercedes SBC—Sensotronic Brake System Warranty—Extended To 25 Years! Available online: https://atlanticmotorcar.com/casestudies/good-news-mercedes-sbc-sensotronic-brake-system-recall-extended-to-25-years/ (accessed on 25 November 2022).
- Saiteja, P.; Jeyanthi, S. Fuzzy Logic Simulation for Brake-by-Wire Control System. In Innovative Design and Development Practices in Aerospace and Automotive Engineering; Bajpai, R., Chandrasekhar, U., Eds.; Lecture Notes in Mechanical Engineering; Springer: Singapore, 2017; pp. 135–147. [Google Scholar] [CrossRef]
- Continental Continental’s Cutting-Edge Brake Technology MK C1 Enables the Next Step to Highly Automated Driving. Press Release. 2017. Available online: https://www.continental.com/en/press/press-releases/cutting-edge-brake-technology-mk-c1/ (accessed on 23 May 2023).
- Continental TÜV Test Confirms: Continental MK C1 Brake System Reduces CO2 Emissions of Hybrid Vehicles by around 5 g. Press Release. 2019. Available online: https://www.continental.com/en/press/press-releases/mk-c1-brake-system/ (accessed on 23 May 2023).
- Continental Continental’s Integrated Brake System MK C1 Wins 2017 Automotive News PACE Award. Press Release. 2017. Available online: https://www.continental.com/en/press/press-releases/2017-04-04-mkc1-pace-award/ (accessed on 23 May 2023).
- Continental World Premiere: Continental’s Brake System MK C1 Debuts in the New Alfa Romeo Giulia. PR Newswire. 2016. Available online: https://www.prnewswire.com/news-releases/world-premiere-continentals-brake-system-mk-c1-debuts-in-the-new-alfa-romeo-giulia-300290047.html (accessed on 23 May 2023).
- Audi Academy. The 2019 Audi e-Tron Introduction; 2019. Available online: https://static.nhtsa.gov/odi/tsbs/2019/MC-10155750-9999.pdf (accessed on 23 May 2023).
- Continental MK C2 from Continental is an Enabler for Brake Systems in Future Vehicle Architectures. Press Release. 2021. Available online: https://www.continental.com/en/press/press-releases/mk-c2-from-continental-is-an-enabler/ (accessed on 23 May 2023).
- Petrescu, R.V.V. Mechatronic Systems to the Braking Mechanisms. J. Mechatron. Robot. 2020, 4, 156–190. [Google Scholar] [CrossRef]
- Gumiel, J.; Mabe, J.; Jiménez, J.; Barruetabeña, J. Introducing the Electronic Knowledge Framework into the Traditional Automotive Suppliers’ Industry: From Mechanical Engineering to Mechatronics. Businesses 2022, 2, 273–289. [Google Scholar] [CrossRef]
- ISO 26262; Road Vehicles—Functional Safety. ISO: Geneva, Switzerland, 2009.
- Li, D.; Tan, C.; Ge, W.; Cui, J.; Gu, C.; Chi, X. Review of Brake-by-Wire System and Control Technology. Actuators 2022, 11, 80. [Google Scholar] [CrossRef]
- Liu, W.; Quijano, K.; Crawford, M.M. YOLOv5-Tassel: Detecting Tassels in RGB UAV Imagery with Improved YOLOv5 Based on Transfer Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8085–8094. [Google Scholar] [CrossRef]
- Kilian, P.; Kohler, A.; Van Bergen, P.; Gebauer, C.; Pfeufer, B.; Koller, O.; Bertsche, B. Principle Guidelines for Safe Power Supply Systems Development. IEEE Access 2021, 9, 107751–107766. [Google Scholar] [CrossRef]
- Spadoni, A. Adaptive Brake by Wire: From Human Factors to Adaptive Implementation. Ph.D. Thesis, University of Trento, Trento, Italy, 2013. [Google Scholar]
- Li, C.; Zhuo, G.; Tang, C.; Xiong, L.; Tian, W.; Qiao, L.; Cheng, Y.; Duan, Y. A Review of Electro-Mechanical Brake (EMB) System: Structure, Control and Application. Sustainability 2023, 15, 4514. [Google Scholar] [CrossRef]
- Zheng, H.; Ma, S.; Liu, Y. Vehicle braking force distribution with electronic pneumatic braking and hierarchical structure for commercial vehicle. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 481–493. [Google Scholar] [CrossRef]
- Kumar, A.S.A.; George, B.; Mukhopadhyay, S.C. Technologies and Applications of Angle Sensors: A Review. IEEE Sens. J. 2020, 21, 7195–7206. [Google Scholar] [CrossRef]
- Lee, K.J.; Ki, Y.H.; Cheon, J.S.; Hwang, G.; Ahn, H.S. Approach to functional safety-compliant ECU design for electro-mechanical brake systems. Int. J. Automot. Technol. 2014, 15, 325–332. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control Syst. Technol. 2022, 31, 179–192. [Google Scholar] [CrossRef]
- Du, W.Y. Resistive, Capacitive, Inductive, and Magnetic Sensor Technologies; CRC Press: San Jose, CA, USA, 2014; ISBN 9781439812495. [Google Scholar] [CrossRef]
- Smith, M. 11 Myths about Inductive Position Sensors. Electronic Design. 2019. Available online: https://cdn.baseplatform.io/files/base/ebm/electronicdesign/document/2019/10/electronicdesign_29141_microchip.pdf (accessed on 23 May 2023).
- White, T. A Tutorial for the Digital SENT Interface; Integrated Device Technology, Inc.: San Jose, CA, USA, 2014. [Google Scholar]
- Beaurenaut, L. Short PWM Code: A Step towards Smarter Automotive Sensors. In Advanced Microsystems for Automotive Applications 2009; Meyer, G., Valldorf, J., Gessner, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 383–395. ISBN 978-3-642-00744-6. [Google Scholar] [CrossRef]
- Armstrong, K.; Das, S.; Cresko, J. The energy footprint of automotive electronic sensors. Sustain. Mater. Technol. 2020, 25, e00195. [Google Scholar] [CrossRef]
- Schmutzler, C.; Krüger, A.; Schuster, F.; Simons, M. Energy efficiency in automotive networks: Assessment and concepts. In Proceedings of the 2010 International Conference on High Performance Computing & Simulation, Caen, France, 28 June–2 July 2010; pp. 232–240. [Google Scholar] [CrossRef]
- Liebetrau, T.; Kelling, U.; Otter, T.; Hell, M. Energy Saving in Automotive E/E Architectures; Infineon Technologies AG: Neubiberg, Germany, 2012; Available online: https://www.eletimes.com/wp-content/uploads/2017/02/Infineon-Energy_Saving_in_Automotive_EE_Architectures.pdf (accessed on 23 May 2023).
- Teja, R. Wheatstone Bridge|Working, Examples, Applications. Available online: https://www.electronicshub.org/wheatstone-bridge/ (accessed on 21 August 2022).
- Hernandez, W. Improving the Response of a Load Cell by Using Optimal Filtering. Sensors 2006, 6, 697–711. [Google Scholar] [CrossRef]
- Nardi, A.; Armato, A. Functional safety methodologies for automotive applications. In Proceedings of the 2017 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), Irvine, CA, USA, 13–16 November 2017; pp. 970–975. [Google Scholar] [CrossRef]
- Anderson, N.; Szorc, N.; Gunasekaran, V.; Joshi, S.; Jursich, G. Highly sensitive screen printed strain sensors on flexible substrates via ink composition optimization. Sens. Actuators A Phys. 2019, 290, 1–7. [Google Scholar] [CrossRef]
- Montero, W.; Farag, R.; Díaz, V.; Ramirez, M.; Boada, B.L. Uncertainties Associated with Strain-Measuring Systems Using Resistance Strain Gauges. J. Strain Anal. Eng. Des. 2011, 46, 1–13. [Google Scholar] [CrossRef]
- Enser, H.; Kulha, P.; Sell, J.K.; Jakoby, B.; Hilber, W.; Strauß, B.; Schatzl-Linder, M. Printed Strain Gauges Embedded in Organic Coatings. Procedia Eng. 2016, 168, 822–825. [Google Scholar] [CrossRef]
- Bose, A.K.; Zhang, X.; Maddipatla, D.; Masihi, S.; Panahi, M.; Narakathu, B.B.; Bazuin, B.J.; Williams, J.D.; Mitchell, M.F.; Atashbar, M.Z. Screen-Printed Strain Gauge for Micro-Strain Detection Applications. IEEE Sens. J. 2020, 20, 12652–12660. [Google Scholar] [CrossRef]
- Pai, A.; Riepold, M.; Trächtler, A. Model-based precision position and force control of SMA actuators with a clamping application. Mechatronics 2018, 50, 303–320. [Google Scholar] [CrossRef]
- Williams, E.A.; Shaw, G.; Elahinia, M. Control of an automotive shape memory alloy mirror actuator. Mechatronics 2010, 20, 527–534. [Google Scholar] [CrossRef]
- Plastic Brake Pedal for Colume Production. Available online: https://www.plastics.gl/automotive/light-and-life-critical-2/ (accessed on 18 May 2023).
- Harmon, M.J.; Warner, R.W.; Diephuis, J.R.; Brand, A.; Smith, A. Interior System of a Vehicle. U.S. Patent US20230112361A1, 30 September 2021. [Google Scholar]
- Wang, Z.; Yu, L.; Pan, N.; Zhang, L.; Song, J. ISO 26262 Concept Phase Analysis on Distributed Electro-Hydraulic Braking System: The Influence of System Architecture on ASIL Decomposition. In Proceedings of the Volume 3: 16th International Conference on Advanced Vehicle Technologies; 11th International Conference on Design Education; 7th Frontiers in Biomedical Devices; American Society of Mechanical Engineers: Buffalo, NY, USA, 2014. [Google Scholar] [CrossRef]
- Lieberman, J. Citroen SM. Available online: https://jalopnik.com/citroen-sm-264002 (accessed on 21 June 2023).
- Norbye, J.P. European Thoroughbreds: What Are Their Secrets? Popular Science: New York, NY, USA, 1973; pp. 30–36. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Supplier | System | OEM | Vehicles and Production Date |
|---|---|---|---|
| ADVICS | Electronic Controlled Brake (ECB) | Toyota | Previa/Estima Hybrid (2001), Alphard (2002), Prius (2004–2015) |
| Lexus | RX 400h (2005–2009) | ||
| Hitachi | Electrically-Driven Intelligent Brake (EDIB) | Nissan | Fuga Hybrid (2010–2022), Leaf (2010–2017) |
| Infiniti | M35h (2011–2019) | ||
| Continental | Regenerative Braking System (RBS) | Ford | Escape Hybrid (2005–2009), Fusion Hybrid (2009–2012) |
| BMW | X6 Active Hybrid (2010–2012) | ||
| MK C1 | Alfa Romeo | Giulia (2015-Present), Stelvio (2016-Present) | |
| Audi | e-tron (2020–Present) | ||
| Bosch | Sensotronic | Mercedes-Benz | E-Class W211/S211 (2002–2010), CLS C219 (2004–2010), SL R230 (2001–2011), SLR R199 (2003–2009), Maybach W240 (2002–2013) |
| iBooster | Volkswagen | e-Up! (2014–2016), e-Golf (2014–2021), Golf VII GTE (2017–2020) | |
| Opel | Ampera (2017) | ||
| Porsche | 918 Spyder (2013–2015) | ||
| Hydraulic Apply System (HAS) | Renault | Zoe (2013–Present) | |
| Mando | Active Hydraulic Boost (HAB) | Kia | Niro (2019–Present) |
| Hazard ID | Function | Hazard | Op. Mode | Hazardous Event | Consequence |
|---|---|---|---|---|---|
| H.1 | Pedal system must be fail-safe. | Loss of communication. | Normal | Braking intention not processed. | Accident. Could imply fatalities. |
| H.2 | Wrong braking order. | Normal | Unintended braking or missed braking intention. | ||
| H.3 | Loss of electric power. | Stop Normal | Failure in the power supply. | ||
| H.4 | Pedal must return to idle when not pressed. | Pedal got stuck. | Normal | Unintended braking. | Could provoke an accident. |
| Hazard ID | Severity | Exposure | Controllability | ASIL | Safety Goal | |||
|---|---|---|---|---|---|---|---|---|
| H.1 | Could provoke life-threatening injuries. | S3 | Very low probability of connection loss in a point-to-point architecture. | E1 | Difficult. The driver does not have control over data transmission. | C3 | A | Pedal position must always be available. |
| H.2 | Could provoke life-threatening injuries. | S3 | The sensor’s fault rate is low. | E2 | Difficult. The driver does not have control over the brakes in this situation. | C3 | B | |
| H.3 | Could provoke life-threatening injuries. | S3 | Power supplies‘ fault rate is low. | E2 | Uncontrollable if there is only one sensor and no backup power supply. | C3 | B | Guarantee that the pedals are powered and available. |
| H.4 | Could provoke an accident. | S3 | Low probability of the pedal getting stuck. | E2 | Controllable. Driver could actuate to avoid this hazard. | C2 | A | Pedal must not get stuck. Stuck pedal should be detectable. |
| Prototype 1 | Prototype 2 | Prototype 3 | |
|---|---|---|---|
| Resistor A | 120 k Ω | 100 k Ω | 121 k Ω |
| Resistor B | 96 k Ω | 108 k Ω | 110 k Ω |
| Resistor C | 98 k Ω | 103 k Ω | 105 k Ω |
| Resistor D | 121 k Ω | 108 k Ω | 117 k Ω |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gumiel, J.Á.; Mabe, J.; Burguera, F.; Jiménez, J.; Barruetabeña, J. Next-Generation Pedal: Integration of Sensors in a Braking Pedal for a Full Brake-by-Wire System. Sensors 2023, 23, 6345. https://doi.org/10.3390/s23146345
Gumiel JÁ, Mabe J, Burguera F, Jiménez J, Barruetabeña J. Next-Generation Pedal: Integration of Sensors in a Braking Pedal for a Full Brake-by-Wire System. Sensors. 2023; 23(14):6345. https://doi.org/10.3390/s23146345
Chicago/Turabian StyleGumiel, Jose Ángel, Jon Mabe, Fernando Burguera, Jaime Jiménez, and Jon Barruetabeña. 2023. "Next-Generation Pedal: Integration of Sensors in a Braking Pedal for a Full Brake-by-Wire System" Sensors 23, no. 14: 6345. https://doi.org/10.3390/s23146345
APA StyleGumiel, J. Á., Mabe, J., Burguera, F., Jiménez, J., & Barruetabeña, J. (2023). Next-Generation Pedal: Integration of Sensors in a Braking Pedal for a Full Brake-by-Wire System. Sensors, 23(14), 6345. https://doi.org/10.3390/s23146345