

A Driving Power Supply for Piezoelectric Transducers Based on an Improved LC Matching Network


Abstract
1. Introduction
2. Analysis of Piezoelectric Transducer and Matching Network
2.1. PT Equivalent Model and Characteristic Frequencies
2.2. Matching Network
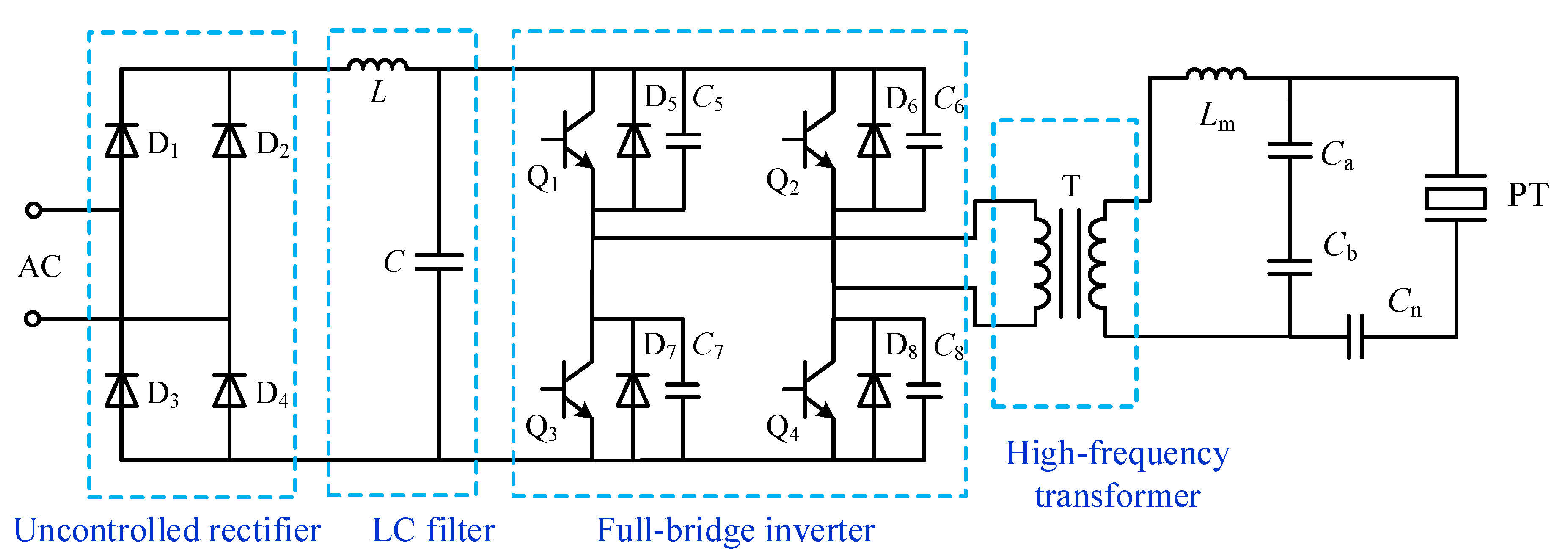
3. The Driving Power Supply Design
3.1. System Composition
3.2. Frequency Tracking
3.2.1. Series Resonance Frequency Discrimination
- (1)
- As shown in Figure 9a, when the dynamic branch occurs in series resonance, the dynamic branch is resistive, and uz is in phase with i1, the angle between in and i1 is equal to the angle γ between in and uz, then Insin γ = I0;
- (2)
- As shown in Figure 9b, when the dynamic branch is inductive, i1 lags uz by a certain angle, then Insin γ < I0;
- (3)
- As shown in Figure 9c, when the dynamic branch is capacitive, i1 leads uz by a certain angle, then Insin γ > I0.
- (1)
- If M = 0, the dynamic branch is resistive, and the PT works at a mechanical resonant frequency.
- (2)
- If M > 0, the dynamic branch is capacitive and the frequency should be increased.
- (3)
- If M < 0, the dynamic branch is inductive and the frequency should be reduced.
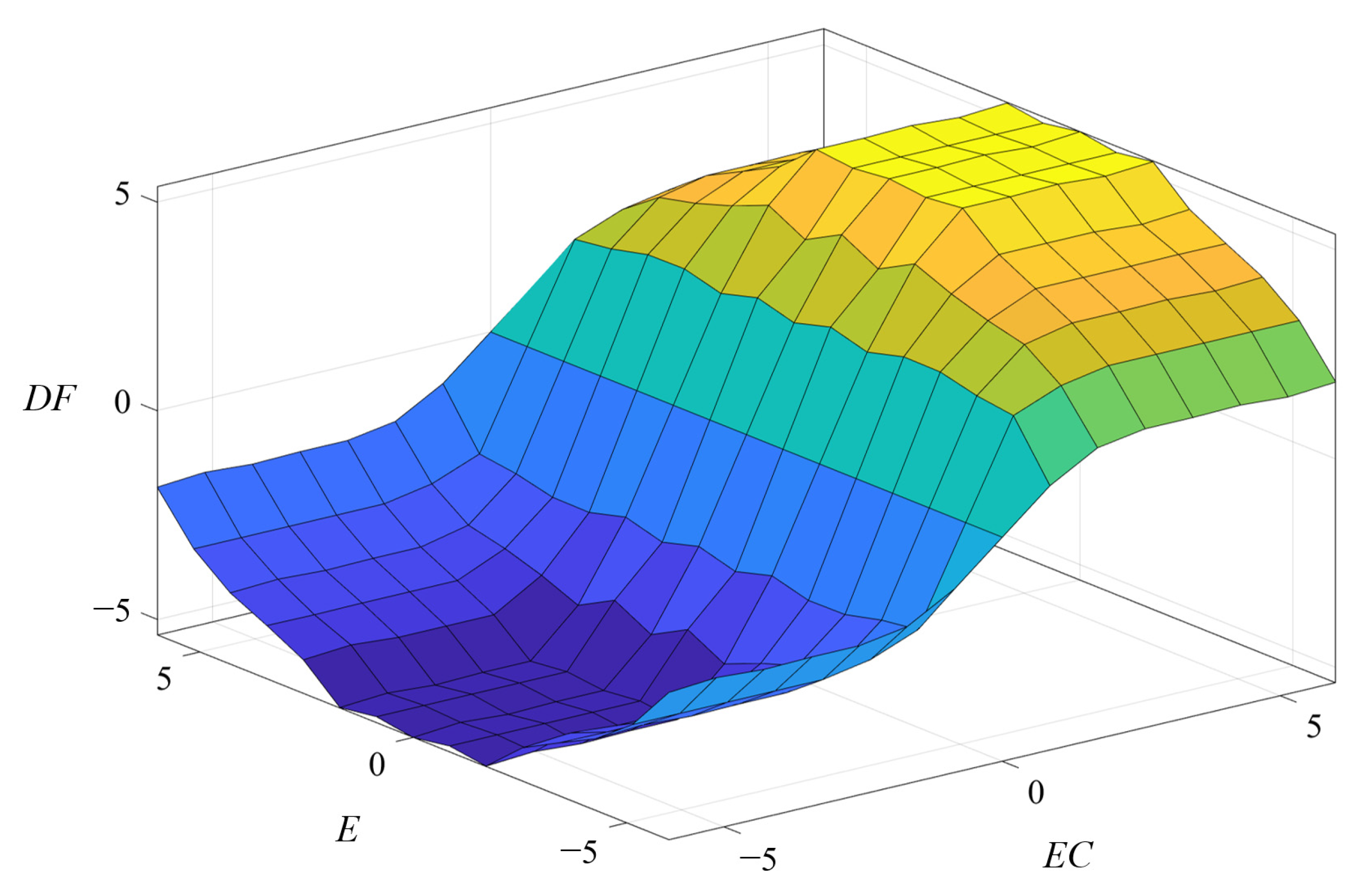
3.2.2. Fuzzy Control Algorithm
- (1)
- The basic domain of the judgment value is [−45,000, 45,000], and the fuzzy domain after fuzzification is [−6, −4, −2, 0, 2, 4, 6]. The fuzzy set composed of fuzzy language uses 7 levels (NB, NM, NS, ZO, PS, PM, PB), and the quantization factor is KE = 1/7500.
- (2)
- The basic domain of the rate of change of the judgment value is [−1800, 1800], and the fuzzy domain after fuzzification is taken as [−6, −4, −2, 0, 2, 4, 6], and the fuzzy set composed by the fuzzy language adopts 7 levels (NB, NM, NS, ZO, PS, PM, PB), and the quantization factor is KEC = 1/300.
- (3)
- The basic domain of the frequency change quantity is [−18, 18], the fuzzy domain is taken as [−6, −4, −2, 0, 2, 4, 6], the fuzzy set is divided into 7 classes (NB, NM, NS, ZO, PS, PM, PB), and the scaling factor KDF = 3.
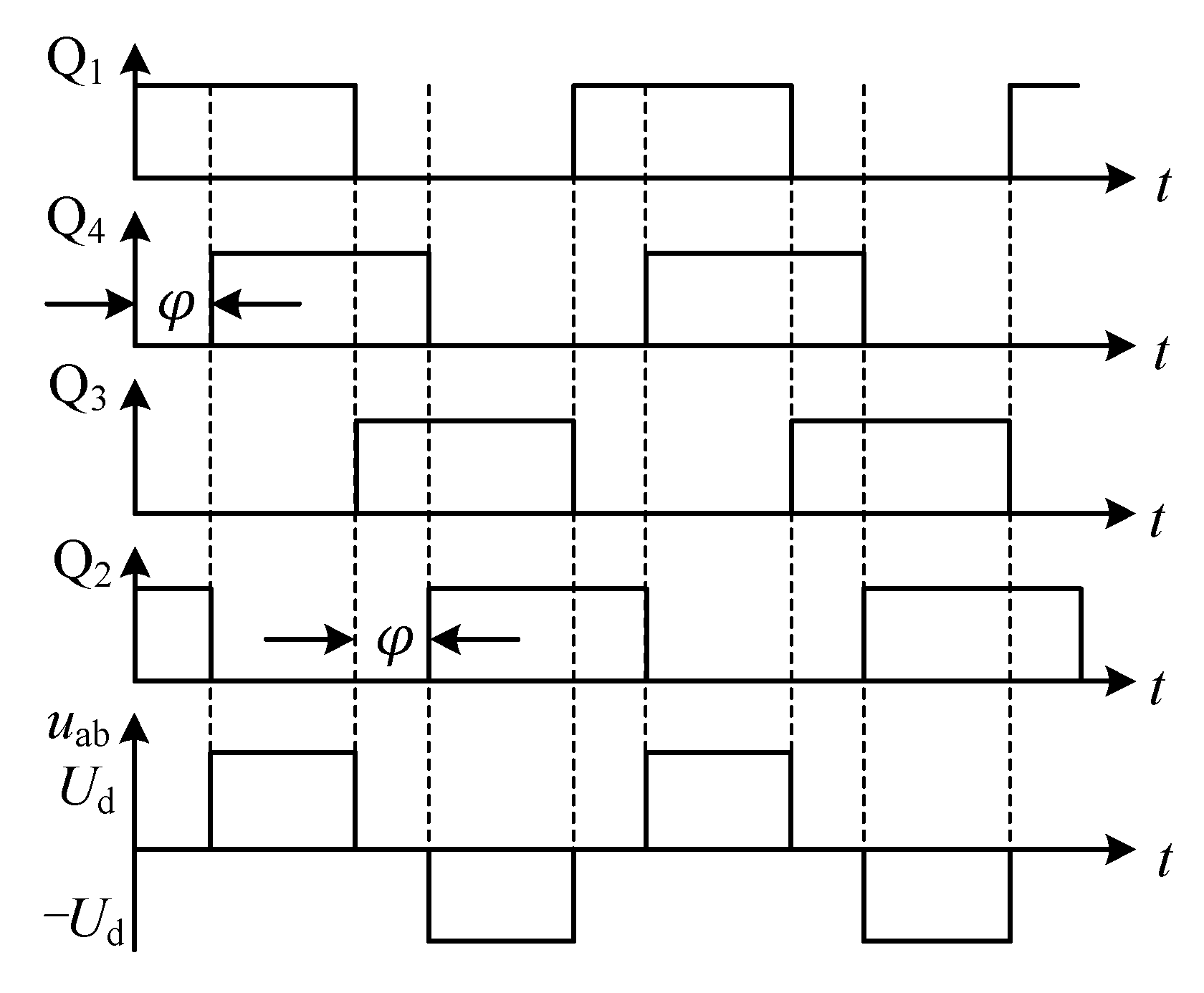
3.3. Power Regulation
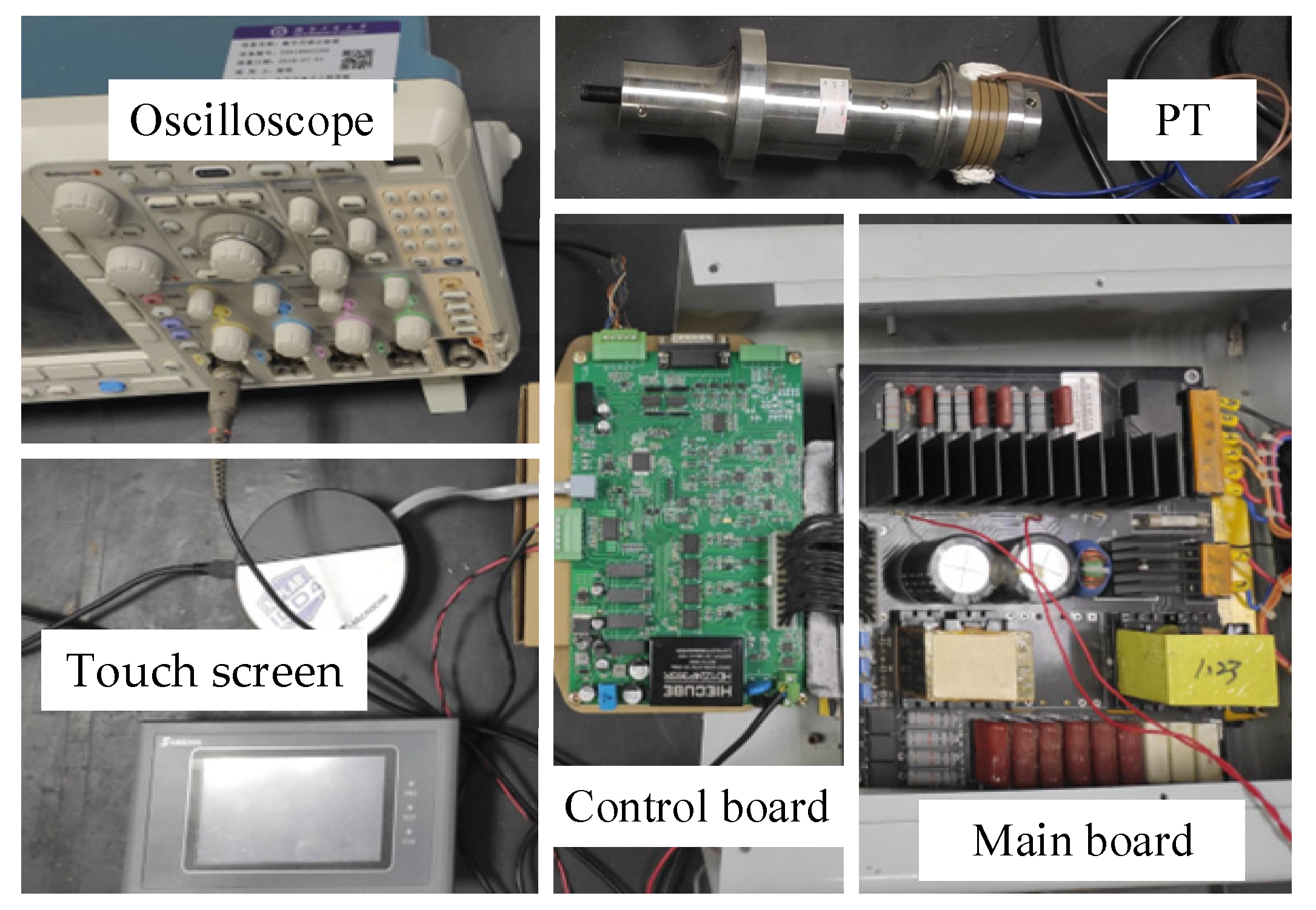
4. Experimental Verification
4.1. Experimental Setups
4.2. Frequency Tracking Verification
4.3. Power Regulation Verification
5. Conclusions
- 1.
- To address the problem that it is difficult to analyze the dynamic branch of a PT because its equivalent circuit has electromechanical characteristics, we designed an improved LC matching circuit. The voltage information in the LC matching circuit was used to determine the series resonant frequency of the PT. The theoretical analysis results show that it can be achieved to analyze the dynamic branch of the PT indirectly and accurately.
- 2.
- The driving power supply system was designed with three voltage RMS values in a modified LC matching network as feedback. Based on the analysis of the relationship between the judgment value and frequency, a frequency-tracking method based on fuzzy control was proposed. Simulation and experiment verified that the method can effectively track the series resonant frequency with high tracking accuracy.
- 3.
- The principle of PS-PWM power regulation of the full-bridge inverter circuit in the main circuit of the driving power supply was analyzed. The power and current were calculated from the three RMS voltage values of the improved LC matching network. The power control strategy of the power outer loop and circuit current inner loop was proposed. Simulations and experiments verified the performance of PS-PWM power regulation and the stability and rapidity of the double closed-loop control algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wagner, G.; Balle, F.; Eifler, D. Ultrasonic Welding of Hybrid Joints. JOM 2012, 64, 401–406. [Google Scholar] [CrossRef]
- Kumar, S.; Wu, C.; Padhy, G.; Ding, W. Application of ultrasonic vibrations in welding and metal processing: A status review. J. Manuf. Process. 2017, 26, 295–322. [Google Scholar] [CrossRef]
- Harvey, G.; Gachagan, A.; Mutasa, T. Review of High-Power Ultrasound-Industrial Applications and Measurement Methods. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 481–495. [Google Scholar] [CrossRef] [PubMed]
- Yao, Y.; Pan, Y.; Liu, S. Power Ultrasound and Its Applications: A State-of-the-Art Review. Ultrason. Sonochem. 2020, 62, 104722. [Google Scholar] [CrossRef]
- De Leon, M.; Shin, H. Review of the Advancements in Aluminum and Copper Ultrasonic Welding in Electric Vehicles and Superconductor Applications. J. Mater. Process. Technol. 2022, 307, 117691. [Google Scholar] [CrossRef]
- Bhudolia, S.; Gohel, G.; Leong, K.; Islam, A. Advances in Ultrasonic Welding of Thermoplastic Composites: A Review. Materials 2020, 13, 1284. [Google Scholar] [CrossRef]
- Liu, X.; Li, P.; Xia, H.; Jiang, F.; Shen, S. Ultrasonic Metal Welding Techniques. Hot Work. Technol. 2015, 44, 14–18. [Google Scholar]
- Li, H.; Chen, C.; Yi, R.; Li, Y.; Wu, J. Ultrasonic Welding of Fiber-Reinforced Thermoplastic Composites: A Review. Int. J. Adv. Manuf. Technol. 2022, 120, 29–57. [Google Scholar] [CrossRef]
- Kuang, Y.; Jin, Y.; Cochran, S.; Huang, Z. Resonance Tracking and Vibration Stablilization for High Power Ultrasonic Trans-ducers. Ultrasonics 2014, 54, 187–194. [Google Scholar] [CrossRef]
- Ye, S.; Long, Z.; Ju, J.; Peng, T.; Yin, J. Toward ultrasonic wire bonding for high power device: A vector based resonant frequency tracking and constant amplitude control. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1337–1348. [Google Scholar] [CrossRef]
- Pons, J.L.; Ochoa, P.; Villegas, M. Self-tuned Driving of Piezoelectric Actuators—The Case of Ultrasonic Motors. J. Eur. Ceram. Soc. 2007, 27, 4163–4167. [Google Scholar] [CrossRef]
- Liu, X.; Colli-Menchi, A.I.; Gilbert, J.; Friedrichs, D.A.; Malang, K.; Sánchez-Sinencio, E. An Automatic Resonance Tracking Scheme with Maximum Power Transfer for Piezoelectric Transducers. IEEE Trans. Ind. Electron. 2015, 62, 7136–7145. [Google Scholar] [CrossRef]
- Lu, Y.; Xu, C.; Pan, Q.; Yu, Q.; Xiao, D. Research on Inherent Frequency and Vibration Characteristics of Sandwich Piezoelectric Ceramic Transducer. Sensors 2022, 22, 9431. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, P.; Zhu, X. Experimental Study on Electrical Performance of Ultrasound Vibrator Based on Load Change. Aeronaut. Manuf. Technol. 2020, 63, 73–80. [Google Scholar]
- Cui, C.; Wang, W.; Zhu, S.; He, Y.; Wang, Y. Ultrasonic Closed-loop Control on Wire Bonder. Equip. Electron. Prod. Manuf. 2014, 233, 1–5. [Google Scholar]
- Xie, C.; Zhang, J.; Deng, Z. Single-chip Microcomputer Based Frequency Tracking and Amplitude Stabilizing for Ultrasonic Peening Equipment. J. Appl. Acoust. 2006, 25, 201–205. [Google Scholar]
- Arnau, A.; Sogorb, T.; Jimenez, Y. A New Method for Continuous Monitoring of Series Resonance Frequency and Simple Determination of Motional Impedance Parameters for Loaded Quartz-crystal Resonators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 617. [Google Scholar] [CrossRef]
- Fan, P.; Zhou, J.; Liu, Z.; Lu, Q. Overview of ultrasonic frequency tracking methods. Audio Eng. 2022, 46, 1–5. [Google Scholar]
- Xiao, X.; Zhang, J.; Liu, Z. Design and implementation of ultrasonic transducer based on single chip microcomputer control. J. Appl. Acoust. 2015, 34, 113–118. [Google Scholar]
- Lin, C.; Ying, L.; Chiu, H. Eliminating the Temperature Effect of Piezoelectric Transformer in Backlight Electronic Ballast by Applying the Digital Phase-Locked-Loop Technique. IEEE Trans. Ind. Electron. 2007, 54, 1024–1031. [Google Scholar] [CrossRef]
- Dong, H.; Wu, J.; Zhang, G.; Wu, H. An Improved Phase-Locked Loop Method for Automatic Resonance Frequency Tracing Based on Static Capacitance Broadband Compensation for a High-Power Ultrasonic Transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 205–210. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, K.; Wang, J.; Feng, P.; Ahmad, S. A Fast and Accurate Frequency Tracking Method for Ultrasonic Cutting System via the Synergetic Control of Phase and Current. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 902–910. [Google Scholar] [CrossRef] [PubMed]
- Arnau, A.; Sogorb, T.; Jimenez, Y. A Continuous Motional Series Resonant Frequency Monitoring Circuit and a New Method of Determining Butterworth–Van Dyke Parameters of a Quartz Crystal Microbalance in Fluid Media. Rev. Sci. Instrum. 2000, 71, 2563–2571. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, F.; Zhang, D.; Wang, L.; Hou, Y.; Xi, T. A New Automatic Resonance Frequency Tracking Method for Piezoelectric Ultrasonic Transducers Used in Thermosonic Wire Bonding. Sens. Actuators A Phys. 2015, 235, 140–150. [Google Scholar] [CrossRef]
- Moon, J.; Park, S.; Lim, S. A Novel High-Speed Resonant Frequency Tracking Method Using Transient Characteristics in a Piezoelectric Transducer. Sensors 2022, 22, 6378. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X. Research on Ultrasonic Power Supply Based on DSP and Bridgeless PFC. Master’s Thesis, Zhejiang University, Hangzhou, China, 2020. [Google Scholar]
- Wang, J.; Jiang, J.; Duan, F.; Cheng, S.; Peng, C.; Liu, W.; Qu, X. A High-Tolerance Matching Method Against Load Fluctuation for Ultrasonic Transducers. IEEE Trans. Power Electron. 2020, 35, 1147–1155. [Google Scholar] [CrossRef]
- Rathod, V.T. A Review of Electric Impedance Matching Techniques for Piezoelectric Sensors, Actuators and Transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef]
- Lee, J.; Kim, J. Theoretical and Empirical Verification of Electrical Impedance Matching Method for High-Power Transducers. Electronics 2022, 11, 194. [Google Scholar] [CrossRef]
- Liao, P.; Liu, C. Design of Power Regulation System of Full-Bridge Phase-Shifted Casting Ultrasonic Power. J. Power Supply 2014, 5, 81–86. [Google Scholar]
- Di, S.; Fan, W.; Li, H. Parallel Resonant Frequency Tracking Based on the Static Capacitance Online Measuring for a Piezoelectric Transducer. Sens. Actuators A Phys. 2018, 270, 18–24. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | C0 (nF) | C1 (nF) | L1 (mH) | R1 (Ω) | fs (Hz) |
|---|---|---|---|---|---|
| value | 4.5 | 0.273 | 231.8 | 42 | 20,007 |
| DF | E | |||||||
| NB | NM | NS | ZE | PS | PM | PB | ||
| EC | NB | NS | NS | NS | ZE | PS | PS | PS |
| NM | NM | NM | NM | ZE | PM | PM | PM | |
| NS | NB | NB | NB | ZE | PB | PB | PB | |
| ZE | NB | NB | NB | ZE | PB | PB | PB | |
| PS | NB | NB | NB | ZE | PB | PB | PB | |
| PM | NM | NM | NM | ZE | PM | PM | PM | |
| PB | NS | NS | NS | ZE | PS | PS | PS | |
| Adjustment | U1 | U2 | U3 | M | ∆f |
|---|---|---|---|---|---|
| 1 | 37.56 | 32.88 | 13.51 | 20,312 | 3.45 |
| 2 | 39.08 | 40.25 | 17.43 | 24,935 | 14.10 |
| 3 | 40.9 | 49.67 | 27.8 | 28,746 | 14.11 |
| 4 | 45.12 | 56.81 | 34.26 | 34,437 | 14.02 |
| 5 | 38.12 | 53.81 | 43.26 | 18,428 | 9.67 |
| 6 | 28.78 | 52.77 | 49.81 | 5071 | 3.51 |
| 7 | 25.52 | 48.21 | 51.42 | −2552 | −2.23 |
| 8 | 25.3 | 51.18 | 50.9 | 662 | 1.02 |
| 9 | 25.23 | 50.02 | 51.14 | −723 | −0.57 |
| 10 | 25.52 | 50.27 | 50.95 | −145 | −0.63 |
| 11 | 26.21 | 50.78 | 50.93 | 665 | 1.46 |
| 12 | 25.21 | 50.03 | 51.22 | −815 | −0.84 |
| 13 | 26.13 | 50.43 | 50.94 | 291 | 0.38 |
| 14 | 25.63 | 50.2 | 51.1 | −332 | −0.05 |
| 15 | 25.98 | 50.46 | 51.09 | 78 | 0.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, Y.; Zhao, Y.; Yan, H.; Cai, H. A Driving Power Supply for Piezoelectric Transducers Based on an Improved LC Matching Network. Sensors 2023, 23, 5745. https://doi.org/10.3390/s23125745
Feng Y, Zhao Y, Yan H, Cai H. A Driving Power Supply for Piezoelectric Transducers Based on an Improved LC Matching Network. Sensors. 2023; 23(12):5745. https://doi.org/10.3390/s23125745
Chicago/Turabian StyleFeng, Ye, Yang Zhao, Hao Yan, and Huafeng Cai. 2023. "A Driving Power Supply for Piezoelectric Transducers Based on an Improved LC Matching Network" Sensors 23, no. 12: 5745. https://doi.org/10.3390/s23125745
APA StyleFeng, Y., Zhao, Y., Yan, H., & Cai, H. (2023). A Driving Power Supply for Piezoelectric Transducers Based on an Improved LC Matching Network. Sensors, 23(12), 5745. https://doi.org/10.3390/s23125745