

Performance Improvement during Attitude Motion of a Vehicle Using Aerodynamic-Surface-Based Anti-Jerk Predictive Controller



Abstract
1. Introduction
- A ubiquitous four-DOF half car equipped with AAS is presented as a case study.
- Information about future road maneuvers can be obtained by direct detection using sensors attached to the vehicle with a 0.3 s preview time.
- The desired roll or pitch angles are computed using vehicle speed, future road maneuvers, and the disturbance forces acting on the vehicle body.
- The proposed control scheme aims to improve ride performance by canceling external jerks.
- The simulation results are carried out using MATLAB to validate the effectiveness of the proposed anti-jerk predictive control strategy in terms of reducing the controlling jerk to achieve the smooth movement of AAS, to overcome the trade-off between ride comfort and road-holding at the cost of slow tracking.
2. Problem Formulation
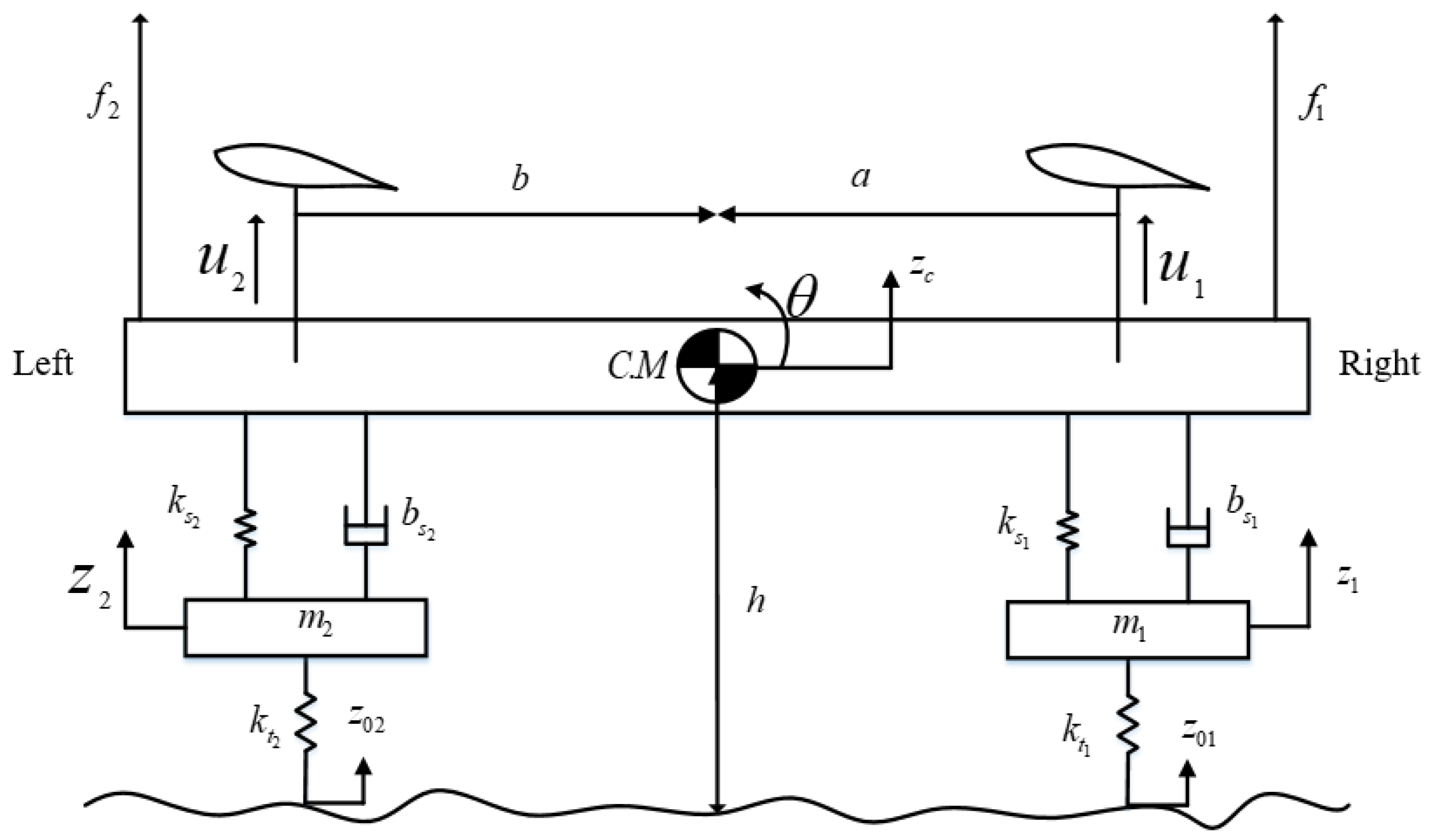
2.1. Vehicle Model
2.2. Desired Roll Angle
2.3. Desired Pitch Angle
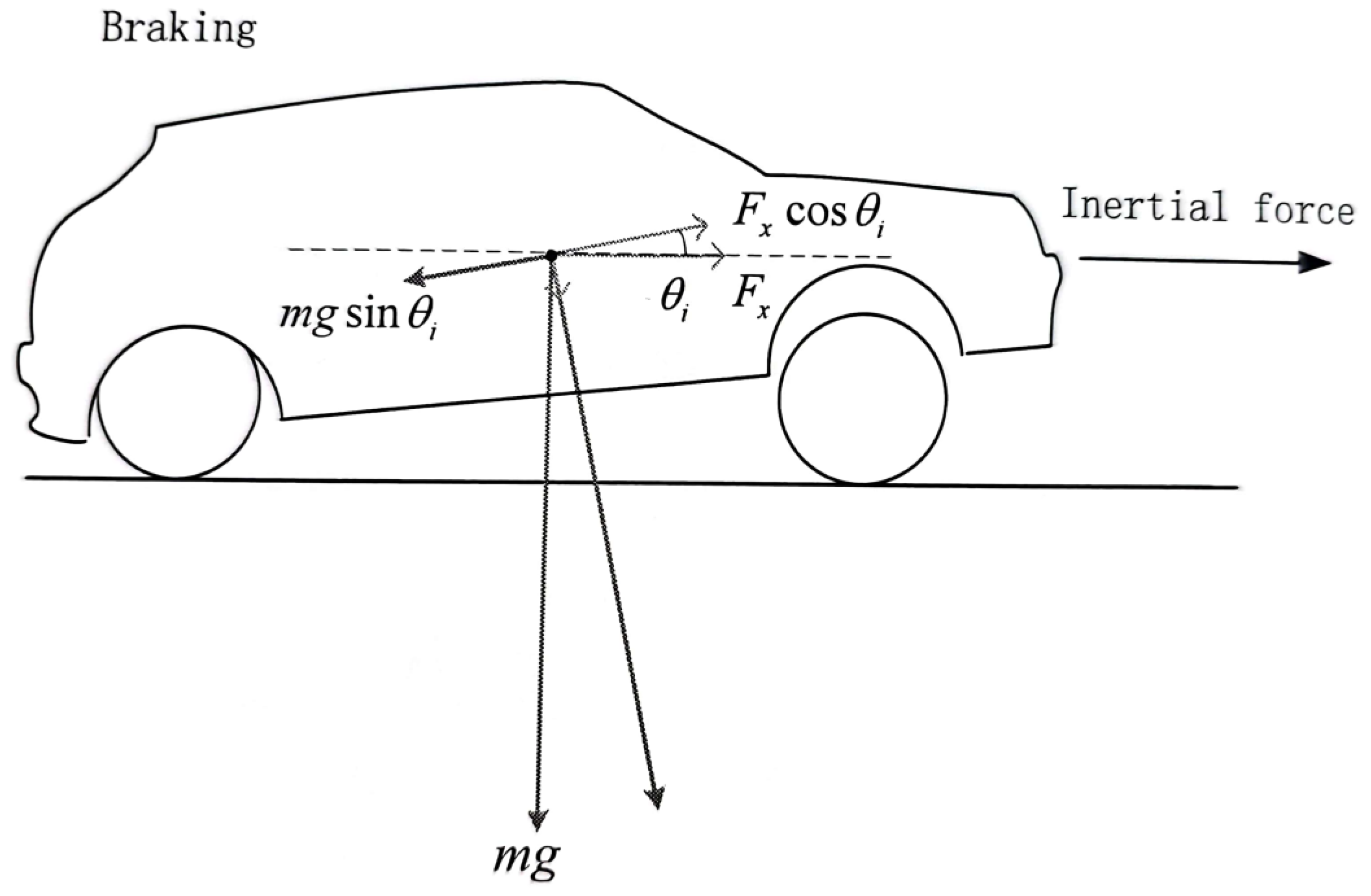
2.4. Aerodynamic Forces
3. Optimal Anti-Jerk Controller Formulation
3.1. System Description
3.2. Anti-Jerk Controller Design
4. Simulation Results and Discussion
4.1. Roll Angle Tracking
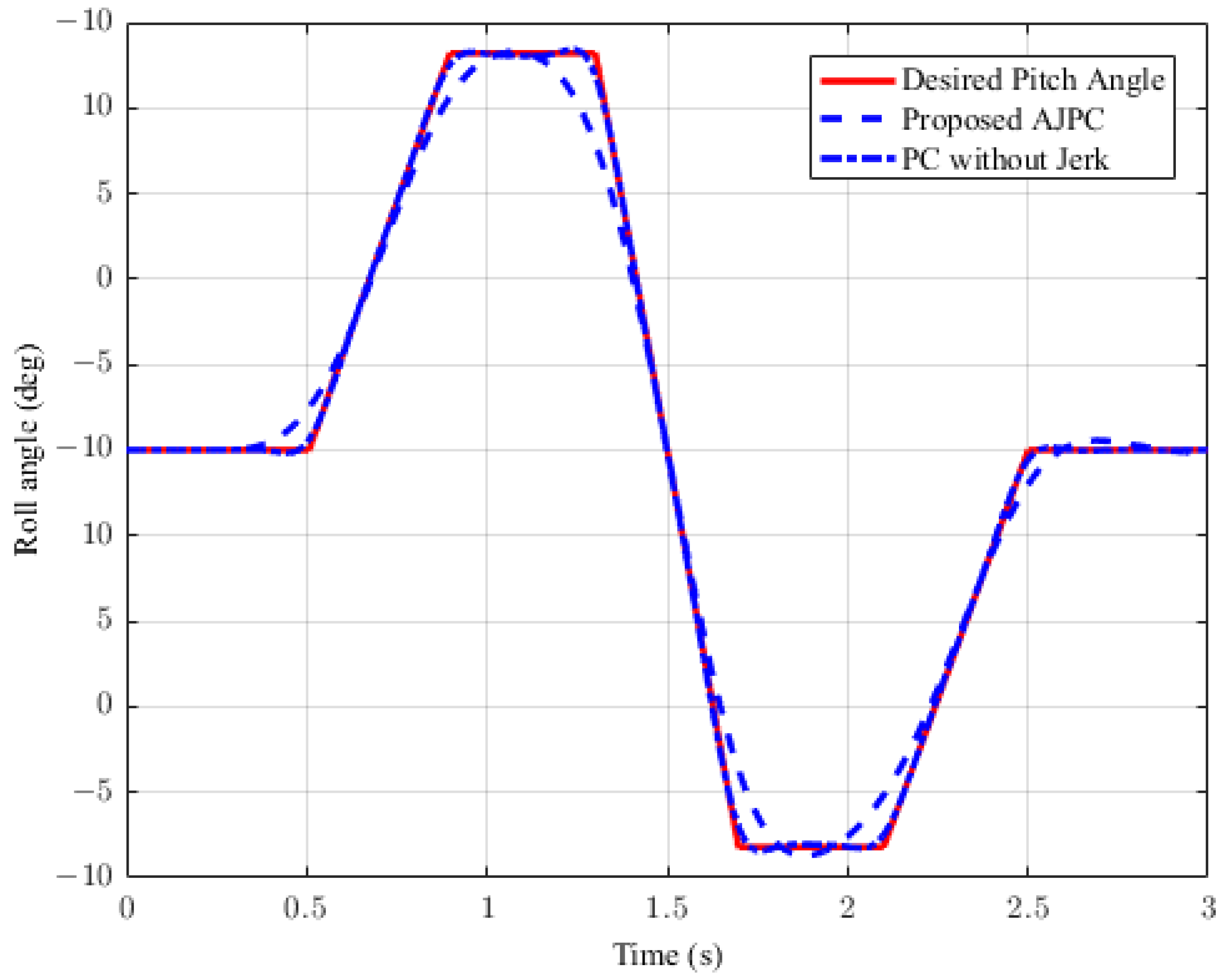
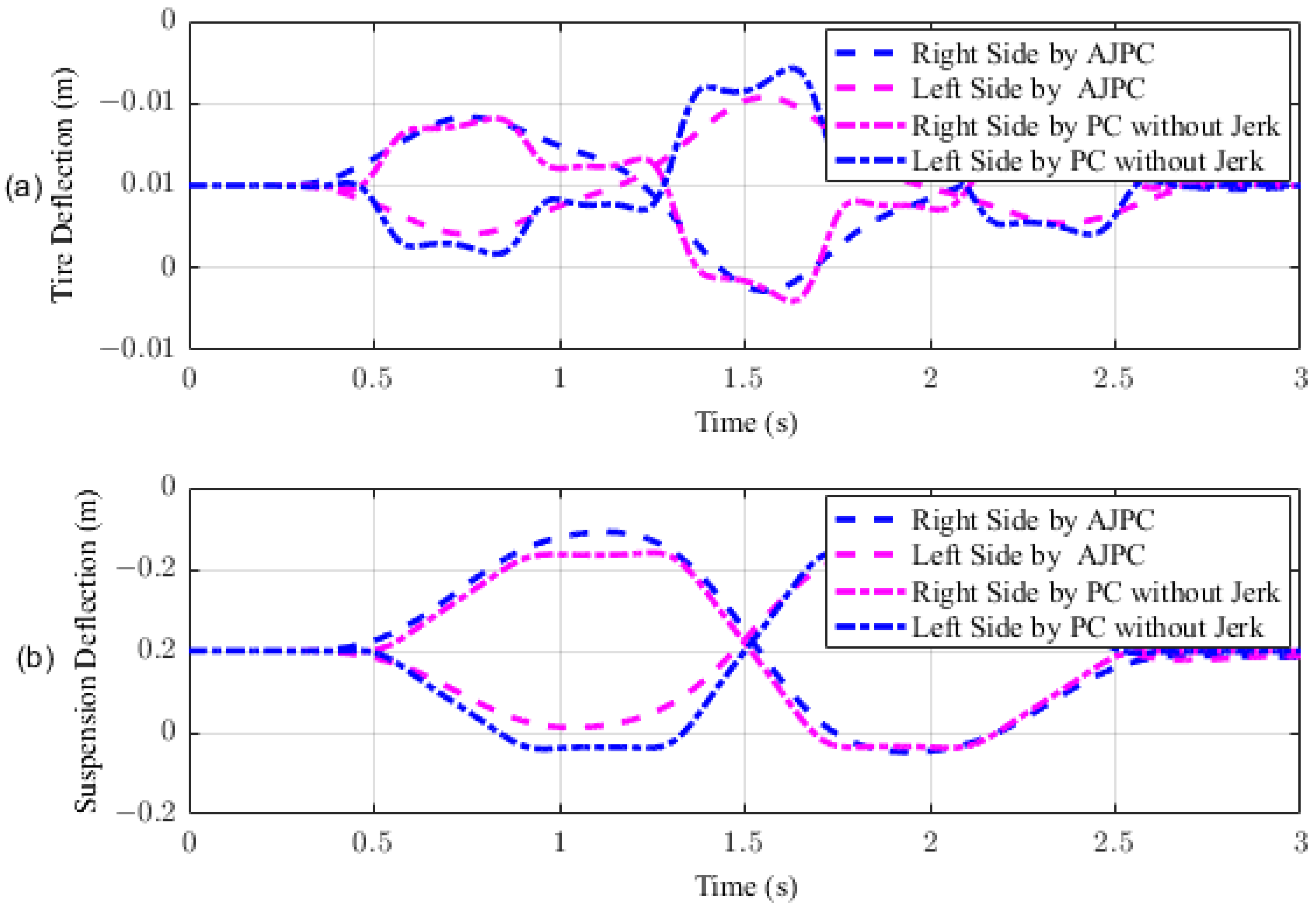
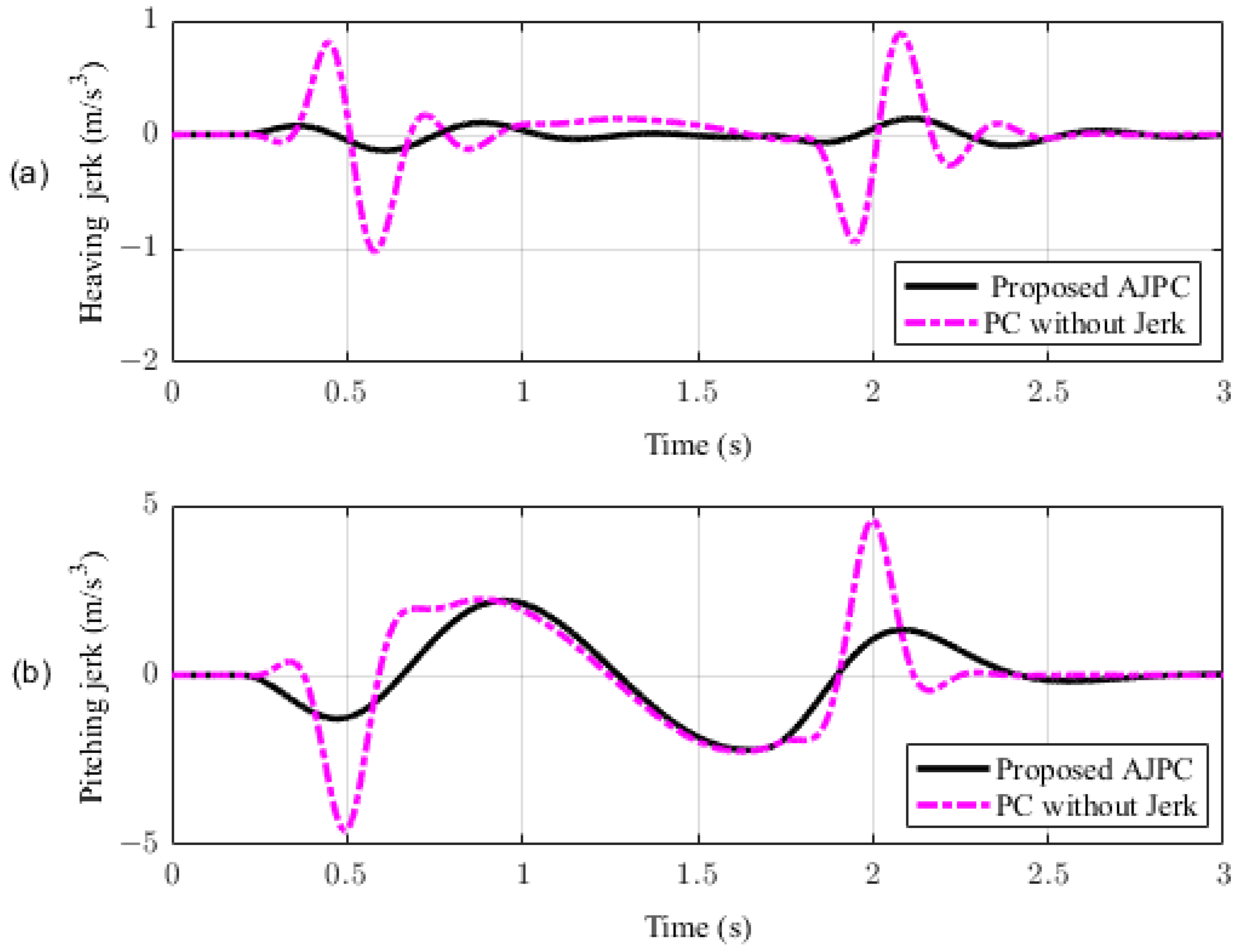
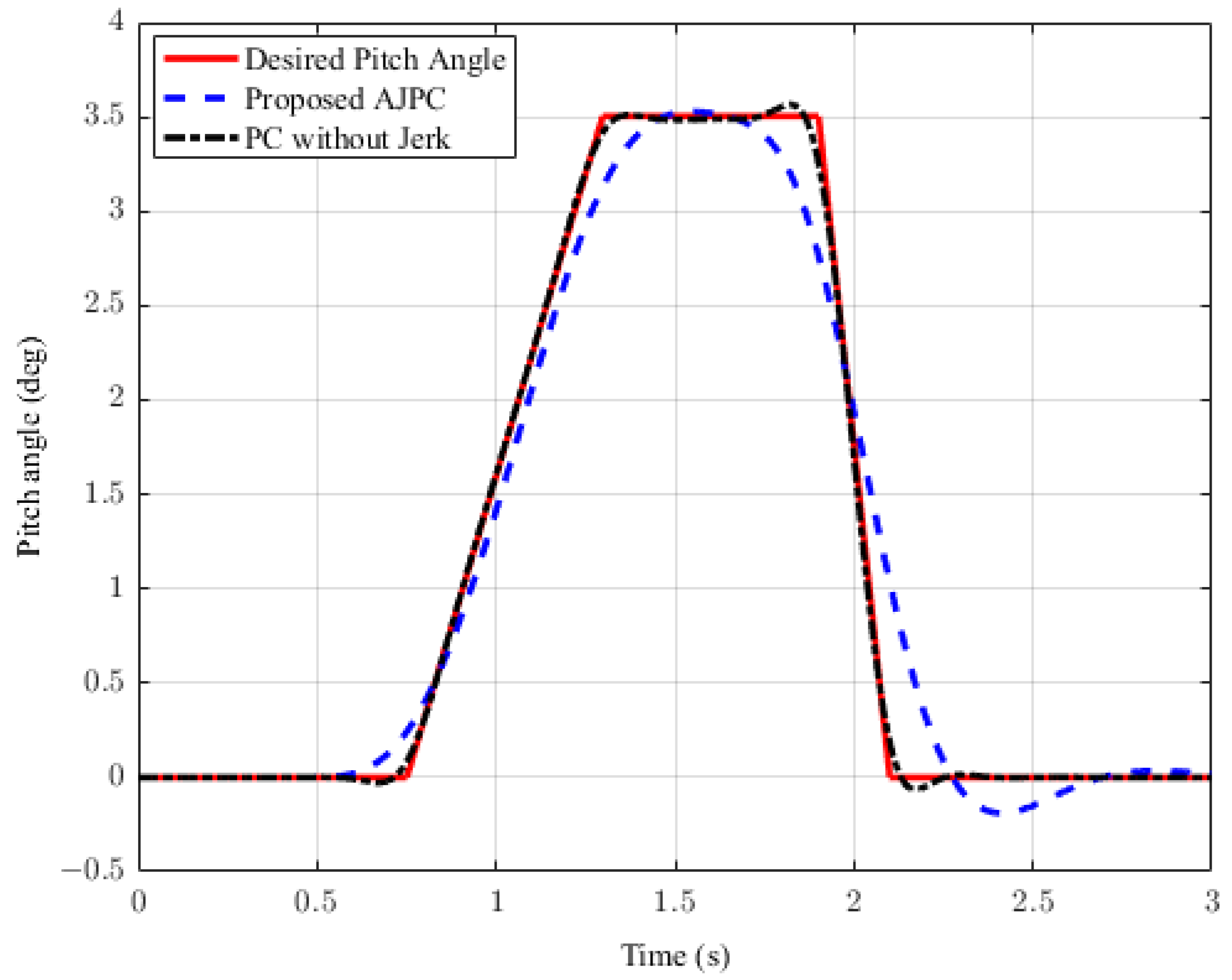
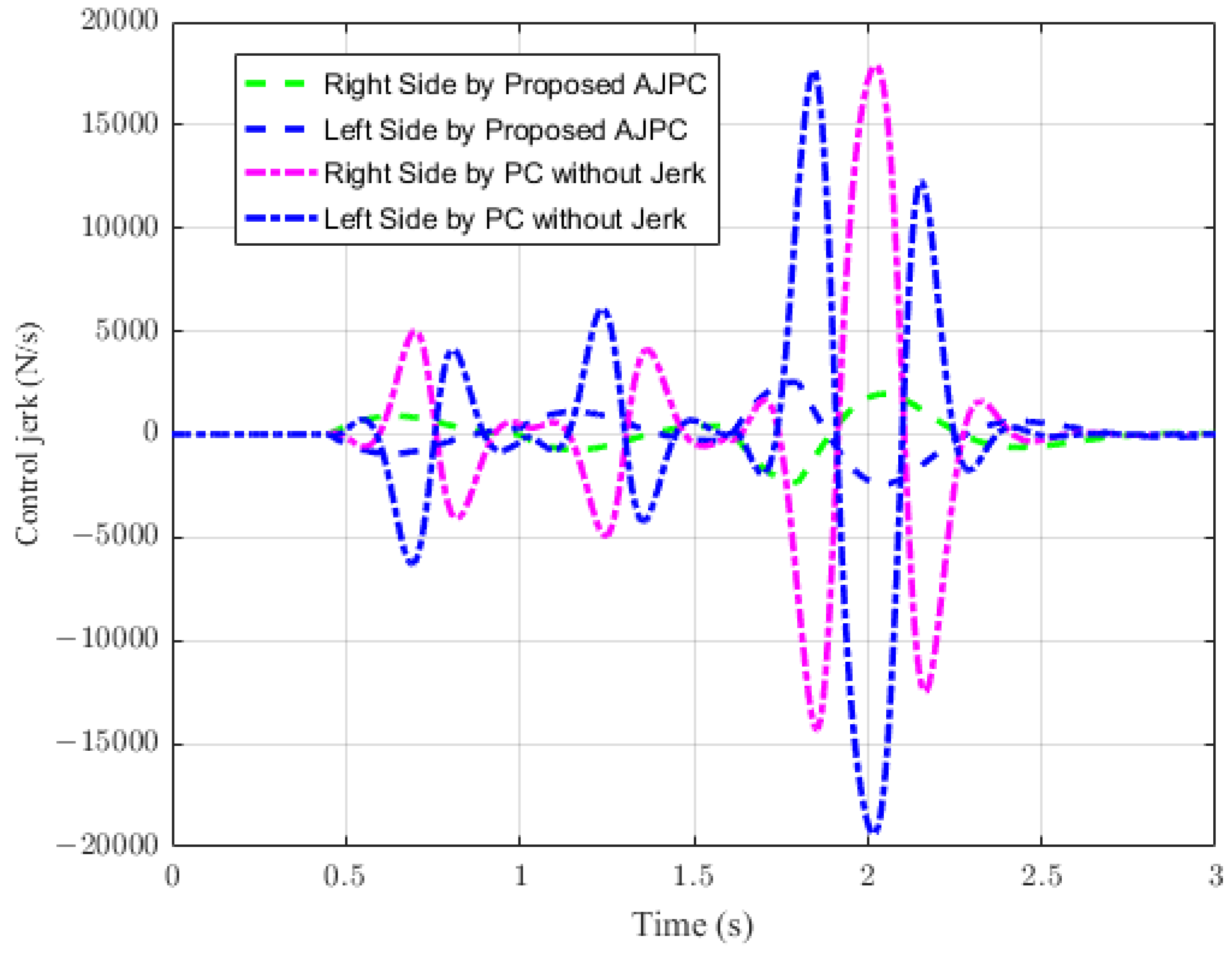
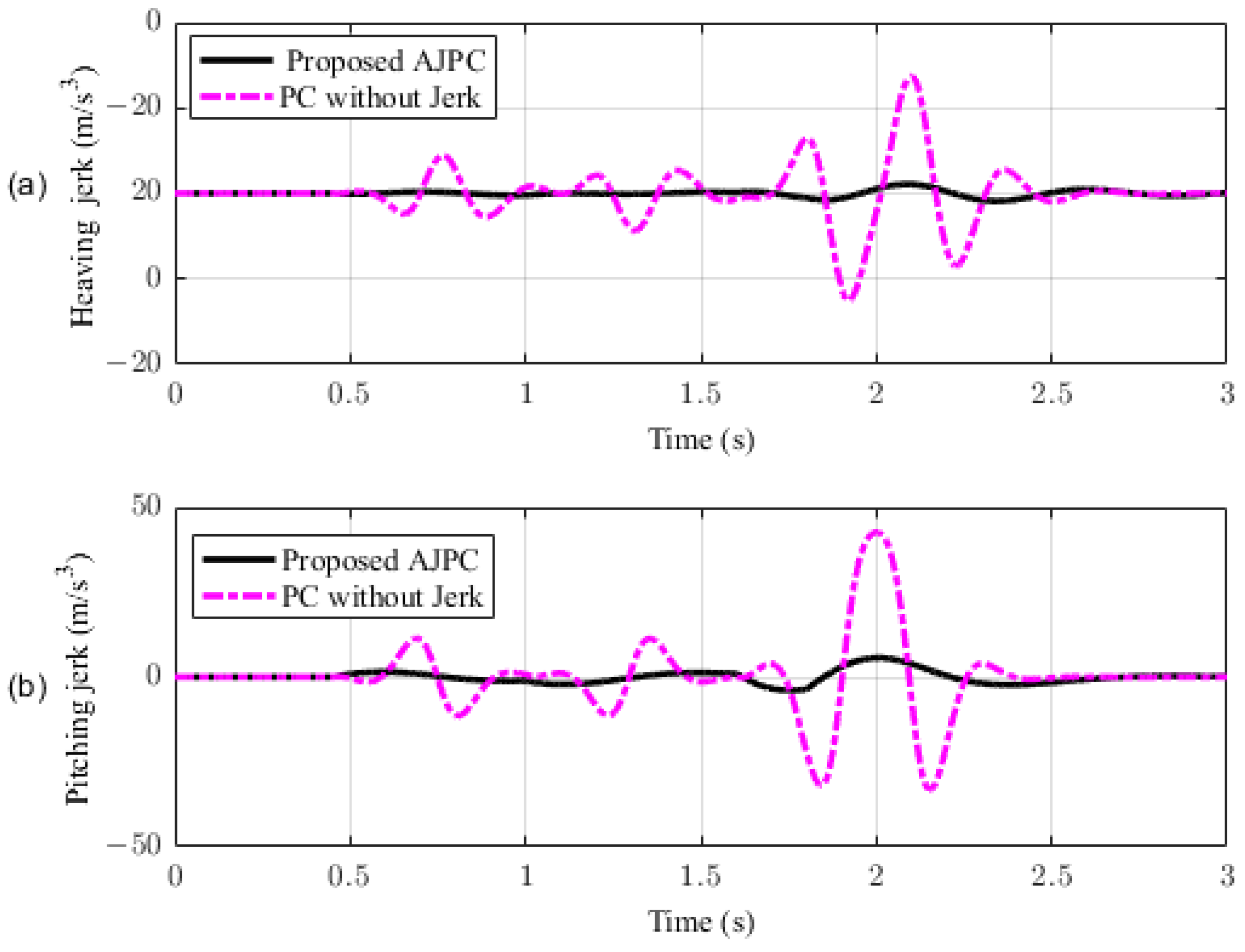
4.2. Desired Pitch Angle Tracking
5. Conclusions
- The current work can be extended to a full-car model, along with the actuator dynamics of the airfoil.
- A discrete-time implementation of the suggested control method will allow future research on the proposed control strategy.
- Robust and intelligent control algorithms may be considered to address both air and road disturbances.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| M | Vehicle body sprung mass |
| Unsprung masses | |
| I | Moment of inertia |
| Spring stiffness coefficients of right and left side or front and rear sides | |
| Tire stiffness coefficients of right and left side or front and rear sides | |
| Damping coefficients of right and left side or front and rear sides | |
| a | Distance of the right or front side from the center of mass |
| b | Distance of the left or rear side from the center of mass |
| h | Height of the center of mass from the ground |
| Sprung mass displacement | |
| Roll or pitch angle of the vehicle body | |
| Road slope | |
| g | Gravitational acceleration |
| Centripetal acceleration | |
| Inertial acceleration | |
| Desired roll angle | |
| Desired pitch angle | |
| Unsprung mass displacements of right and left or front and rear sides | |
| Road disturbances at right and left or front and rear sides | |
| Hypothetical body force acting at the right or front side of the vehicle body | |
| Hypothetical body force acting at left or rear side of the vehicle body | |
| v | Vehicle speed |
| Disturbance input | |
| F | Centrifugal force during cornering or inertial force during accelerating of braking |
| Air density | |
| S | Surface area of the airfoil |
| Angle of attack of the airfoil | |
| Lift coefficient of the airfoil | |
| Weighing constant for heaving acceleration | |
| Weighing constant for angular acceleration | |
| Weighing constant for suspension deflection | |
| Weighing constant for desired angle tracking | |
| Weighing constant for tire deflection | |
| Weighing constant for jerk controller |
Appendix A
References
- He, D.; He, W.; Song, X. Efficient predictive cruise control of autonomous vehicles with improving ride comfort and safety. Meas. Control 2020, 53, 18–28. [Google Scholar] [CrossRef]
- Cvok, I.; Hrgetić, M.; Hoić, M.; Deur, J.; Ivanovic, V. Design of a linear motor-based shaker rig for testing driver’s perceived ride comfort. Mechatronics 2021, 75, 102521. [Google Scholar] [CrossRef]
- Mata-Carballeira, Ó.; del Campo, I.; Asua, E. An eco-driving approach for ride comfort improvement. IET Intell. Transp. Syst. 2022, 16, 186–205. [Google Scholar] [CrossRef]
- Tang, X.; Duan, Z.; Hu, X.; Pu, H.; Cao, D.; Lin, X. Improving ride comfort and fuel economy of connected hybrid electric vehicles based on traffic signals and real road information. IEEE Trans. Veh. Technol. 2021, 70, 3101–3112. [Google Scholar] [CrossRef]
- Yatak, M.Ö.; Şahin, F. Ride comfort-road holding trade-off improvement of full vehicle active suspension system by interval type-2 fuzzy control. Eng. Sci. Technol. Int. J. 2021, 24, 259–270. [Google Scholar] [CrossRef]
- He, H.; Li, Y.; Jiang, J.Z.; Burrow, S.; Neild, S.; Conn, A. Enhancing the trade-off between ride comfort and active actuation requirements via an inerter-based passive-active-combined automotive suspension. Veh. Syst. Dyn. 2023, 1–24. [Google Scholar] [CrossRef]
- Liang, W.; Khan, M.A.; Youn, E.; Youn, I.; Tomizuka, M. Attitude motion control of vehicle including the active passenger seat system. Int. J. Veh. Des. 2018, 78, 131–160. [Google Scholar] [CrossRef]
- Sadeghi, J.; Rabiee, S.; Khajehdezfuly, A. Effect of rail irregularities on ride comfort of train moving over ballast-less tracks. Int. J. Struct. Stab. Dyn. 2019, 19, 1950060. [Google Scholar] [CrossRef]
- Na, J.; Huang, Y.; Wu, X.; Liu, Y.J.; Li, Y.; Li, G. Active suspension control of quarter-car system with experimental validation. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 52, 4714–4726. [Google Scholar] [CrossRef]
- Savkoor, A.; Manders, S.; Riva, P. Design of actively controlled aerodynamic devices for reducing pitch and heave of truck cabins. JSAE Rev. 2001, 22, 421–434. [Google Scholar] [CrossRef]
- Savkoor, A. Aerodynamic vehicle ride control with active spoilers. Proc. AVEC’96 1996, 647–681. Available online: https://ci.nii.ac.jp/naid/10007202754/#cit (accessed on 23 April 2023).
- Meijaard, J.; Savkoor, A.; Lodewijks, G. Potential for Vehicle Ride Improvement Using Both Suspension and Aerodynamic Actuators. In Proceedings of the IEEE International Symposium on Industrial Electronics, ISIE 2005, Dubrovnik, Croatia, 20–23 June 2005; Volume 1, pp. 385–390. [Google Scholar]
- Doniselli, C.; Mastinu, G.; Gobbi, M. Aerodynamic effects on ride comfort and road holding of automobiles. Veh. Syst. Dyn. 1996, 25, 99–125. [Google Scholar] [CrossRef]
- Corno, M.; Bottelli, S.; Panzani, G.; Spelta, C.; Tanelli, M.; Savaresi, S.M. Performance assessment of active aerodynamic surfaces for comfort and handling optimization in sport cars. IEEE Trans. Control Syst. Technol. 2015, 24, 189–199. [Google Scholar] [CrossRef]
- Hosseinian Ahangarnejad, A.; Melzi, S. Numerical analysis of the influence of an actively controlled spoiler on the handling of a sports car. J. Vib. Control 2018, 24, 5437–5448. [Google Scholar] [CrossRef]
- Diba, F.; Barari, A.; Esmailzadeh, E. Handling and safety enhancement of race cars using active aerodynamic systems. Veh. Syst. Dyn. 2014, 52, 1171–1190. [Google Scholar] [CrossRef]
- Diba, F.; Barari, A.; Esmailzadeh, E. Active Aerodynamic System to Improve the Safety and Handling of Race Cars in Lane Change and Wet Road Maneuvers. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 12–15 August 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 45059, pp. 417–423. [Google Scholar]
- Wu, Y.; Chen, Z. Improving Road Holding and Ride Comfort of Vehicle Using Dual Active Aerodynamic Surfaces. In Proceedings of the 2018 2nd International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 23–25 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Hammad, M.; Qureshi, K.; He, Y. Safety and Lateral Dynamics Improvement of a Race Car Using Active Rear Wing Control; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Ayyagari, D.T.; He, Y. Aerodynamic analysis of an active rear split spoiler for improving lateral stability of high-speed vehicles. Int. J. Veh. Syst. Model. Test. 2017, 12, 217–239. [Google Scholar] [CrossRef]
- Zhang, X.; Toet, W.; Zerihan, J. Ground effect aerodynamics of race cars. Appl. Mech. Rev. 2006, 59, 33–49. [Google Scholar] [CrossRef]
- Ahmad, E.; Song, Y.; Khan, M.A.; Youn, I. Attitude Motion Control of a Half car Model with Tracking Controller Using Aerodynamic Surfaces. In Proceedings of the 2019 International Automatic Control Conference (CACS), Keelung, Taiwan, 13–16 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Ahmad, E.; Iqbal, J.; Arshad Khan, M.; Liang, W.; Youn, I. Predictive Control Using Active Aerodynamic Surfaces to Improve Ride Quality of a Vehicle. Electronics 2020, 9, 1463. [Google Scholar] [CrossRef]
- Grant, P.R.; Haycock, B. Effect of jerk and acceleration on the perception of motion strength. J. Aircr. 2008, 45, 1190–1197. [Google Scholar] [CrossRef]
- Pendrill, A.M.; Eager, D. Velocity, acceleration, jerk, snap and vibration: Forces in our bodies during a roller coaster ride. Phys. Educ. 2020, 55, 065012. [Google Scholar] [CrossRef]
- Sicat, S.; Woodcock, K.; Ferworn, A. Wearable technology for design and safety evaluation of rider acceleration exposure on aerial adventure attractions. In Proceedings of the Annual Occupational Ergonomics and Safety Conference, Pittsburgh, PA, USA, 7–8 June 2018; pp. 7–8. [Google Scholar]
- Gierlak, P.; Szybicki, D.; Kurc, K.; Burghardt, A.; Wydrzyński, D.; Sitek, R.; Goczał, M. Design and dynamic testing of a roller coaster running wheel with a passive vibration damping system. J. Vibroeng. 2018, 20, 1129–1143. [Google Scholar] [CrossRef]
- Knezevic, B.Z.; Blanusa, B.; Marcetic, D.P. A synergistic method for vibration suppression of an elevator mechatronic system. J. Sound Vib. 2017, 406, 29–50. [Google Scholar] [CrossRef]
- Werkman, J. Determining and Predicting the Seakeeping Performance of Ships Based on Jerk in the Ship Motions. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Bae, I.; Moon, J.; Seo, J. Toward a comfortable driving experience for a self-driving shuttle bus. Electronics 2019, 8, 943. [Google Scholar] [CrossRef]
- Scamarcio, A.; Metzler, M.; Gruber, P.; De Pinto, S.; Sorniotti, A. Comparison of anti-jerk controllers for electric vehicles with on-board motors. IEEE Trans. Veh. Technol. 2020, 69, 10681–10699. [Google Scholar] [CrossRef]
- Scamarcio, A.; Gruber, P.; De Pinto, S.; Sorniotti, A. Anti-jerk controllers for automotive applications: A review. Annu. Rev. Control 2020, 50, 174–189. [Google Scholar] [CrossRef]
- Batra, M.; Maitland, A.; McPhee, J.; Azad, N.L. Non-linear model predictive anti-jerk cruise control for electric vehicles with slip-based constraints. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 3915–3920. [Google Scholar]
- Noceda, J.C. Model Predictive Anti-Jerk Control of an Electrified Drivetrain with Backlash. Ph.D. Thesis, University of Oakland, Rochester, MI, USA, 2023. [Google Scholar]
- Jing, J.; Liu, Y.; Wu, J.; Huang, W.; Zuo, B.; Yang, G. Research on drivability control in P2. 5 hybrid system. Energy Rep. 2021, 7, 1582–1593. [Google Scholar] [CrossRef]
- Yue, Y.; Huang, Y.; Hao, D.; Zhu, G.G. Model reference adaptive LQT control for anti-jerk utilizing tire-road interaction characteristics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1670–1684. [Google Scholar] [CrossRef]
- Liu, Y.; Zuo, L. Mixed skyhook and power-driven-damper: A new low-jerk semi-active suspension control based on power flow analysis. J. Dyn. Syst. Meas. Control 2016, 138, 081009. [Google Scholar] [CrossRef]
- Yamaguchi, A.; Ohishi, K.; Yokokura, Y.; Miyazaki, T.; Sasazaki, K. Backlash-based Shock Isolation Control for Jerk Reduction in Clutch Engagement. IEEJ J. Ind. Appl. 2019, 8, 160–169. [Google Scholar] [CrossRef]
- Hrovat, D.; Hubbard, M. Optimum vehicle suspensions minimizing rms rattlespace, sprung-mass acceleration and jerk. J. Dyn. Sys. Meas. Control. 1981, 103, 228–236. [Google Scholar] [CrossRef]
- Hrovat, D.; Hubbard, M. A comparison between jerk optimal and acceleration optimal vibration isolation. J. Sound Vib. 1987, 112, 201–210. [Google Scholar] [CrossRef]
- Rutledge, D.; Hubbard, M.; Hrovat, D. A two DOF model for jerk optimal vehicle suspensions. Veh. Syst. Dyn. 1996, 25, 113–136. [Google Scholar] [CrossRef]
- Youn, I.; Ahmad, E. Anti-jerk optimal preview control strategy to enhance performance of active and semi-active suspension systems. Electronics 2022, 11, 1657. [Google Scholar] [CrossRef]
- Ahmad, E.; Youn, I. Performance Improvement of a Vehicle Equipped with Active Aerodynamic Surfaces Using Anti-Jerk Preview Control Strategy. Sensors 2022, 22, 8057. [Google Scholar] [CrossRef] [PubMed]
- Kelkar, S.S.; Gautam, P.; Sahai, S.; Agrawal, P.S.; Manoharan, R. A detailed study on design, fabrication, analysis, and testing of the anti-roll bar system for formula student cars. SN Appl. Sci. 2021, 3, 302. [Google Scholar] [CrossRef]
- Chen, Y.; Peterson, A.W.; Ahmadian, M. Achieving anti-roll bar effect through air management in commercial vehicle pneumatic suspensions. Veh. Syst. Dyn. 2019, 57, 1775–1794. [Google Scholar] [CrossRef]
- Karamuk, M.; Alankus, O.B. Development and Experimental Implementation of Active Tilt Control System Using a Servo Motor Actuator for Narrow Tilting Electric Vehicle. Energies 2022, 15, 1996. [Google Scholar] [CrossRef]
- Yao, J.; Wang, M.; Li, Z.; Jia, Y. Research on model predictive control for automobile active tilt based on active suspension. Energies 2021, 14, 671. [Google Scholar] [CrossRef]
- Youn, I.; Wu, L.; Youn, E.; Tomizuka, M. Attitude motion control of the active suspension system with tracking controller. Int. J. Automot. Technol. 2015, 16, 593–601. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Lateral Model | Longitudinal Model | Unit |
|---|---|---|---|
| M | 500 | 500 | kg |
| I | 274 | 1222 | kg m |
| 25 | 25 | kg | |
| 10 | 10 | kN/m | |
| 1 | 1 | kN/m | |
| 1 | 1 | kN/m | |
| a | 0.74 | 1.25 | m |
| b | 0.74 | 1.1 | m |
| h | 0.70 | 0.70 | m |
| Weighting Factors | Targets | Lateral Model | Longitudinal Model | ||
|---|---|---|---|---|---|
| AJPC | PC | AJPC | B | ||
| Heaving acceleration | 1 | 1 | 1 | 1 | |
| Angular acceleration | 1 | 1 | 1 | 1 | |
| Suspension deflection | |||||
| Angle tracking | |||||
| Tire deflection | |||||
| Jerk controller | |||||
| Parameter | PC without Jerk | AJPC |
|---|---|---|
| Heaving jerk | 100 | 82.11 |
| Rolling jerk | 100 | 79.23 |
| Jerk controller | 100 | 40.25 |
| Heaving acceleration | 100 | 86.38 |
| Roll acceleration | 100 | 73.12 |
| Tire deflection | 100 | 92.67 |
| Suspension deflection | 100 | 99.83 |
| Parameter | PC without Jerk | AJPC |
|---|---|---|
| Heaving jerk | 100 | 84.10 |
| Pitching jerk | 100 | 91.31 |
| Jerk controller | 100 | 63.32 |
| Heaving acceleration | 100 | 85.80 |
| Pitching acceleration | 100 | 93.78 |
| Tyre deflection | 100 | 99 |
| Suspension deflection | 100 | 100 |
| Parameter | PC without Jerk | AJPC |
|---|---|---|
| Heaving jerk | 100 | 88.40 |
| Pitching jerk | 100 | 85.14 |
| Jerk controller | 100 | 45.11 |
| Heaving acceleration | 100 | 89.72 |
| Pitching acceleration | 100 | 87.78 |
| Tire deflection | 100 | 98.54 |
| Suspension deflection | 100 | 90.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, E.; Youn, I. Performance Improvement during Attitude Motion of a Vehicle Using Aerodynamic-Surface-Based Anti-Jerk Predictive Controller. Sensors 2023, 23, 5714. https://doi.org/10.3390/s23125714
Ahmad E, Youn I. Performance Improvement during Attitude Motion of a Vehicle Using Aerodynamic-Surface-Based Anti-Jerk Predictive Controller. Sensors. 2023; 23(12):5714. https://doi.org/10.3390/s23125714
Chicago/Turabian StyleAhmad, Ejaz, and Iljoong Youn. 2023. "Performance Improvement during Attitude Motion of a Vehicle Using Aerodynamic-Surface-Based Anti-Jerk Predictive Controller" Sensors 23, no. 12: 5714. https://doi.org/10.3390/s23125714
APA StyleAhmad, E., & Youn, I. (2023). Performance Improvement during Attitude Motion of a Vehicle Using Aerodynamic-Surface-Based Anti-Jerk Predictive Controller. Sensors, 23(12), 5714. https://doi.org/10.3390/s23125714