Thrust Vectoring Control for Heavy UAVs, Employing a Redundant Communication System

 ,
,  , ,
, ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
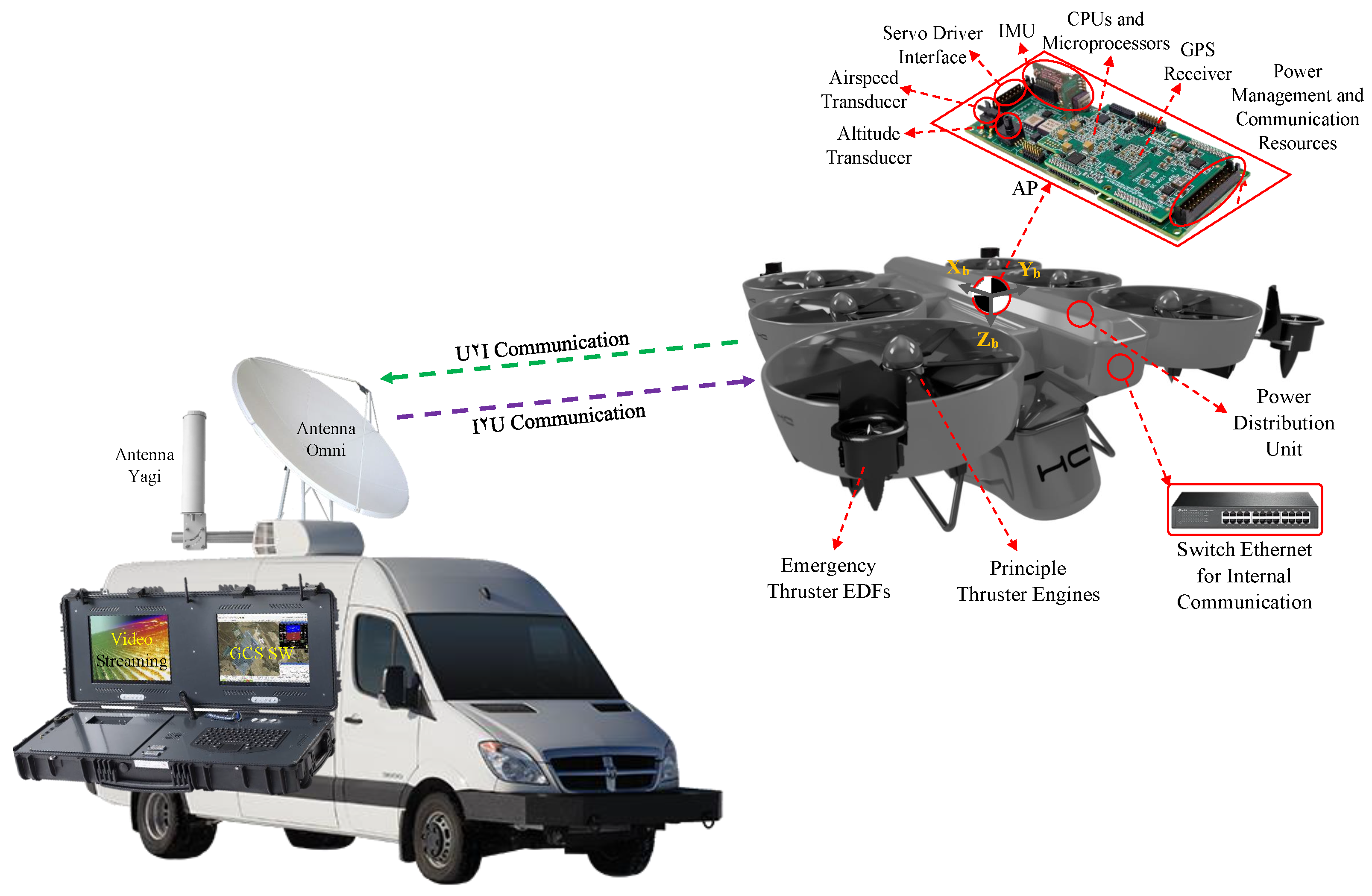
2. UAV Communication Subsystems
2.1. Autopilot (AP) and Digital Systems
2.2. Communication System
3. Dynamic System and Control
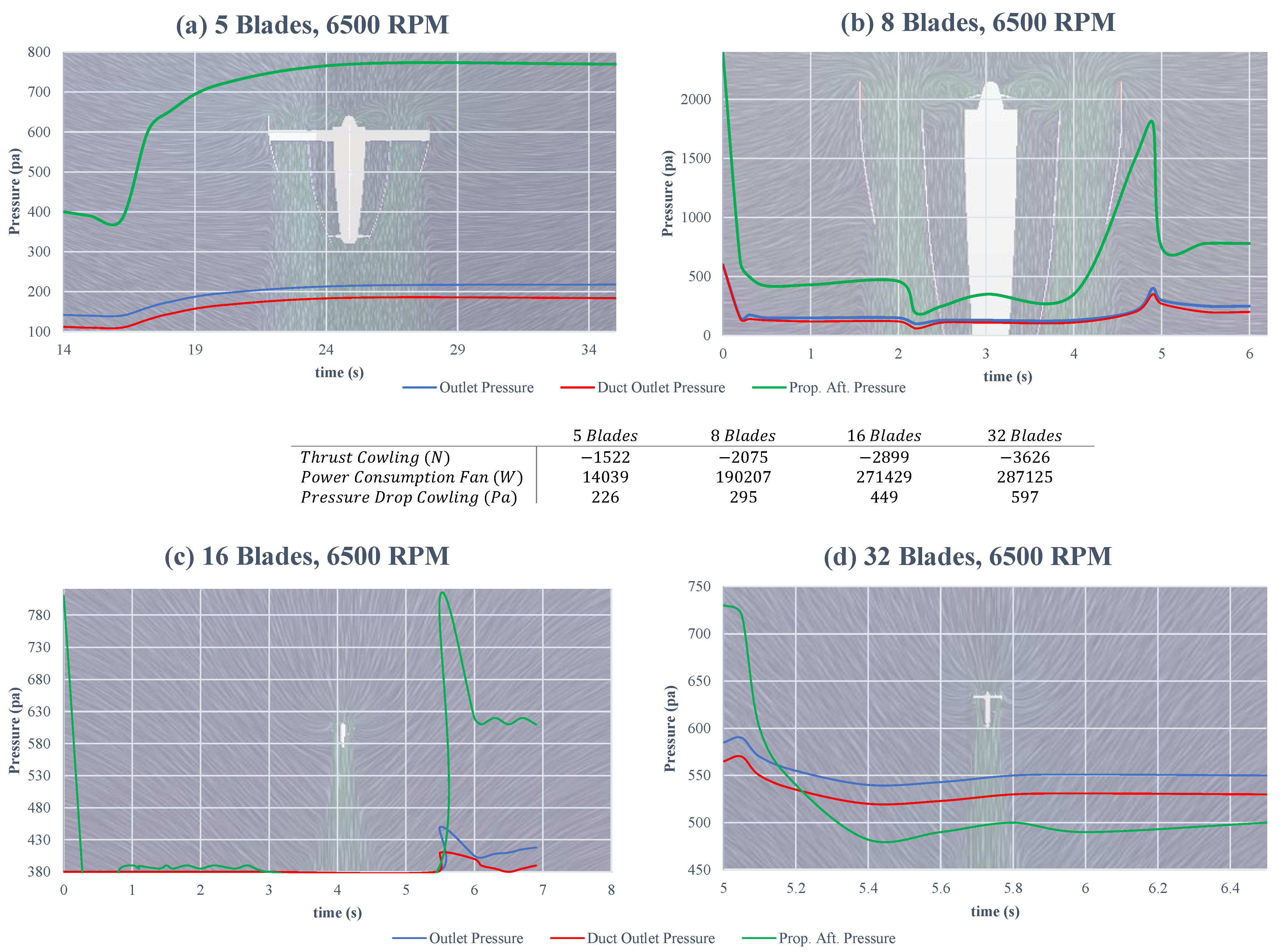
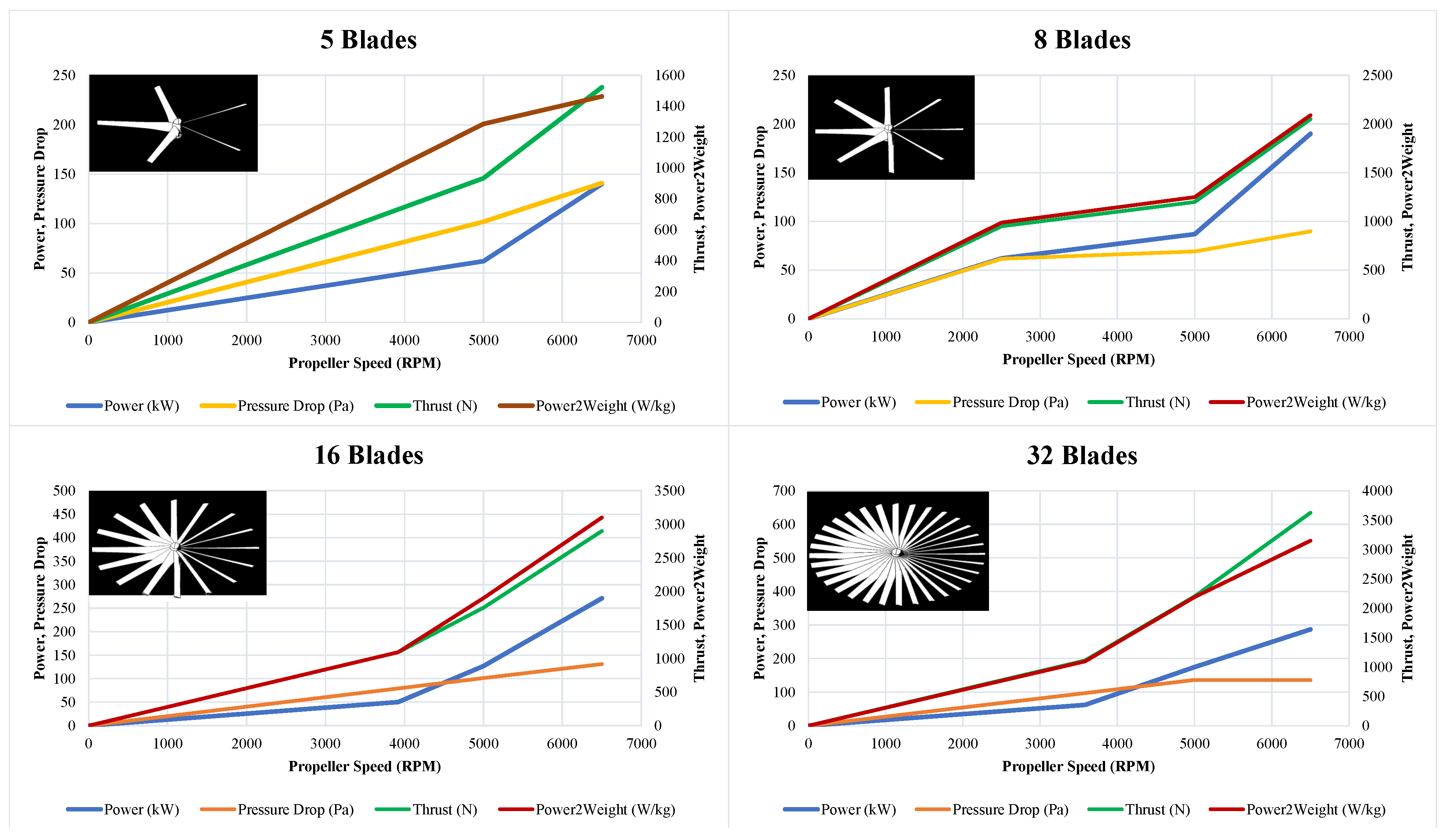
3.1. Aerodynamics Analysis
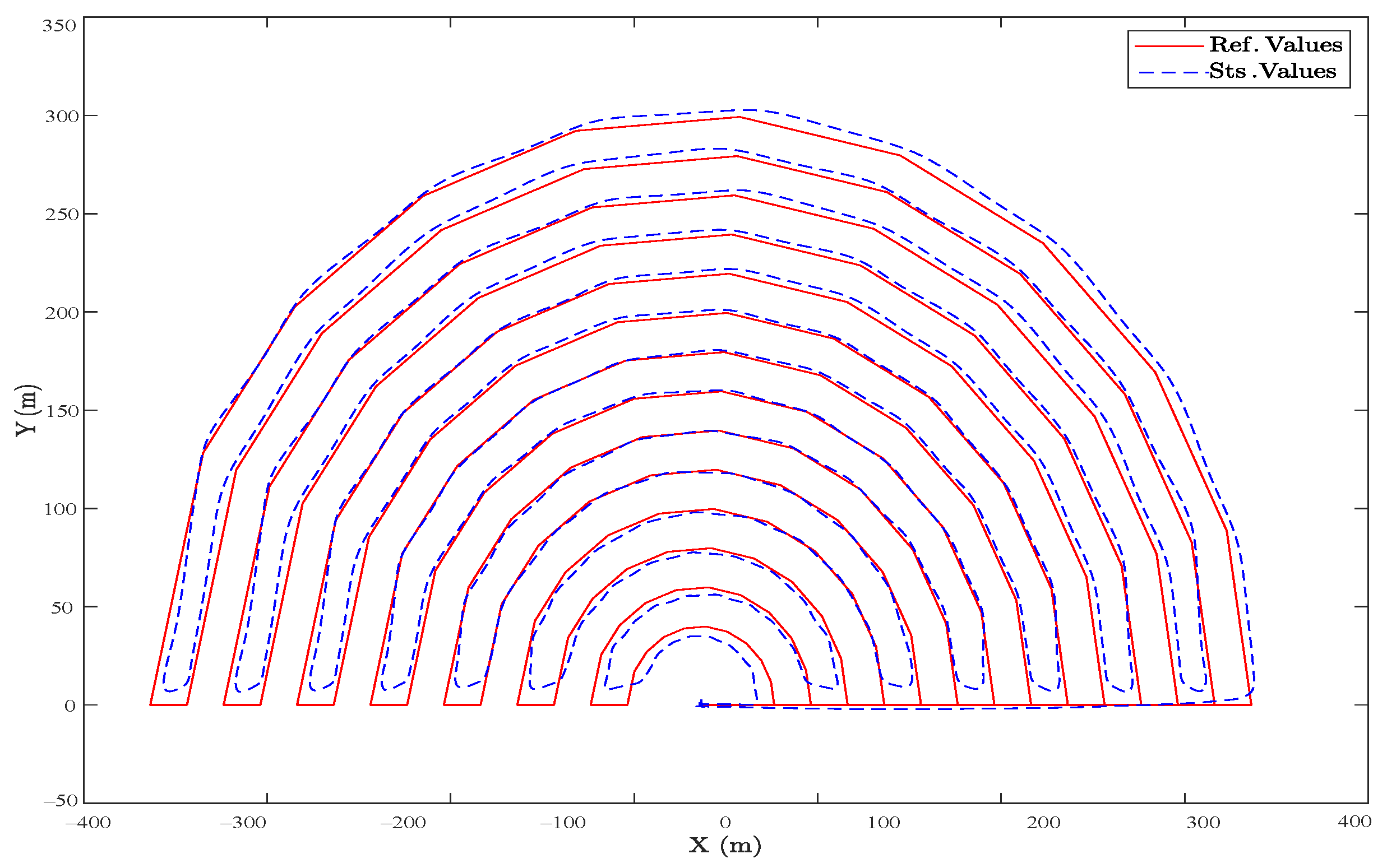
3.2. Control Strategy
4. Results
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AP | Autopilot. |
| UAV | Unmanned Aerial Vehicle. |
| UAS | Unmanned Aerial System. |
| GCS | Ground Control Station. |
| SMC | Sliding Mode Controller. |
| TVC | Thrust Vectoring Control. |
| FANET | Flying ad hoc Network. |
| IBN | Infrastructure-Based Network. |
| WSN | Wireless Sensor Network. |
| WMN | Wireless Mesh Network. |
References
- Tzu, S. The art of war. In Strategic Studies; Routledge: Abingdon, UK, 2008; pp. 63–91. [Google Scholar]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for UAV-enabled mobile relaying systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- NATO. Minimum Training Requirements for Unmanned Aircraft Systems (UAS) Operators and Pilots; Standardization Agreement 4670; NATO: Brussels, Belgium, 2019. [Google Scholar]
- Castrillo, V.U.; Manco, A.; Pascarella, D.; Gigante, G. A Review of Counter-UAS Technologies for Cooperative Defensive Teams of Drones. Drones 2022, 6, 65. [Google Scholar] [CrossRef]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV communication networks issues: A review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef]
- Mozaffari, M. Wireless Communications and Networking with Unmanned Aerial Vehicles: Fundamentals, Deployment, and Optimization. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2018. [Google Scholar]
- Li, B.; Fei, Z.; Dai, Y.; Zhang, Y. Secrecy-optimized resource allocation for UAV-assisted relaying networks. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Behjati, M.; Zulkifley, M.A.; Alobaidy, H.A.; Nordin, R.; Abdullah, N.F. Reliable aerial mobile communications with RSRP & RSRQ prediction models for the Internet of Drones: A machine learning approach. Sensors 2022, 22, 5522. [Google Scholar] [PubMed]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Isaac, M.S.A.; Ragab, A.R.; Garcés, E.C.; Luna, M.A.; Peña, P.F.; Cervera, P.C. Mathematical Modeling and Designing a Heavy Hybrid-Electric Quadcopter, Controlled by Flaps. Unmanned Syst. 2022, 10, 241–253. [Google Scholar] [CrossRef]
- Ale Isaac, M.S.; Luna, M.A.; Ragab, A.R.; Ale Eshagh Khoeini, M.M.; Kalra, R.; Campoy, P.; Flores Peña, P.; Molina, M. Medium-Scale UAVs: A Practical Control System Considering Aerodynamics Analysis. Drones 2022, 6, 244. [Google Scholar] [CrossRef]
- Luna, M.A.; Ale Isaac, M.S.; Ragab, A.R.; Campoy, P.; Flores Peña, P.; Molina, M. Fast Multi-UAV Path Planning for Optimal Area Coverage in Aerial Sensing Applications. Sensors 2022, 22, 2297. [Google Scholar] [CrossRef] [PubMed]
- Ragab, A.R.; Isaac, M.S.A.; Luna, M.A.; Flores Peña, P. WILD HOPPER Prototype for Forest Firefighting. Int. J. Online Biomed. Eng. 2021, 17, 148–168. [Google Scholar] [CrossRef]
- Isaac, M.; Naghash, A.; Mirtajedini, S. Control and guidance of an autonomous quadrotor landing phase on a moving platform. In Proceedings of the IMAV Annual Conference of Autonomous Vehicles, Madrid, Spain, 1–4 October 2019; Volume 29. [Google Scholar]
- Peña, P.F.; Ragab, A.R.; Luna, M.A.; Isaac, M.S.A.; Campoy, P. WILD HOPPER: A heavy-duty UAV for day and night firefighting operations. Heliyon 2022, 8, e09588. [Google Scholar] [CrossRef] [PubMed]
- Miwa, M.; Shigematsu, Y.; Yamashita, T. Control of ducted fan flying object using thrust vectoring. J. Syst. Des. Dyn. 2012, 6, 322–334. [Google Scholar] [CrossRef]
- Zhao, Y.; Tian, Y.; Wan, Z. Aerodynamic Characteristics of a Ducted Fan Hovering and Transition in Ground Effect. Aerospace 2022, 9, 572. [Google Scholar] [CrossRef]
- Urban, D.; Kusmirek, S.; Socha, V.; Hanakova, L.; Hylmar, K.; Kraus, J. Effect of Electric Ducted Fans Structural Arrangement on Their Performance Characteristics. Appl. Sci. 2023, 13, 2787. [Google Scholar] [CrossRef]
- Eltayesh, A.; Castellani, F.; Burlando, M.; Hanna, M.B.; Huzayyin, A.; El-Batsh, H.M.; Becchetti, M. Experimental and numerical investigation of the effect of blade number on the aerodynamic performance of a small-scale horizontal axis wind turbine. Alex. Eng. J. 2021, 60, 3931–3944. [Google Scholar] [CrossRef]
- Jacobsen, E.B. Modelling and Control of Thrust Vectoring Mono-Copter. Master’s Thesis, Aalborg University, Aalborg, Danmark, 2021; p. 89. [Google Scholar]
- Abrego, A.I.; Bulaga, R.W.; Rutkowski, M. Performance study of a ducted fan system. In Proceedings of the American Helicopter Society Aerodynamics, Acoustics and Test and Evaluation Technical Specialists Meeting, San Francisco, CA, USA, 23–25 January 2002. [Google Scholar]
- Muehlebach, M.; D’Andrea, R. The flying platform–a testbed for ducted fan actuation and control design. Mechatronics 2017, 42, 52–68. [Google Scholar] [CrossRef]
- Vehi Perich, M.D. Ducted Fan Propulsion System Study for ONAerospace eVTOL. Bachelor’s Thesis, Polytechnic University of Cataluyna, Barcelona, Spain, February 2023. [Google Scholar]
- Sharma, P.; Atkins, E. Experimental investigation of tractor and pusher hexacopter performance. J. Aircraft. 2019, 56, 1920–1934. [Google Scholar] [CrossRef]
- Reddy, R.S.; Dash, S.K. Design and Analysis of a Hexacopter for Heavy Lift Applications. Int. J. Eng. Res. Technol. 2014, 3, 1352–1357. [Google Scholar]
- Manal Shaban, E.; Merzban, M.; AM Khalaf, A.; Fathy Aly Hamed, H. Comparison of various Control Techniques Applied to a Quadcopter. J. Adv. Eng. Trends 2023, 42, 233–244. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ale Isaac, M.S.; Ragab, A.R.; Luna, M.A.; Ale Eshagh Khoeini, M.M.; Campoy, P. Thrust Vectoring Control for Heavy UAVs, Employing a Redundant Communication System. Sensors 2023, 23, 5561. https://doi.org/10.3390/s23125561
Ale Isaac MS, Ragab AR, Luna MA, Ale Eshagh Khoeini MM, Campoy P. Thrust Vectoring Control for Heavy UAVs, Employing a Redundant Communication System. Sensors. 2023; 23(12):5561. https://doi.org/10.3390/s23125561
Chicago/Turabian StyleAle Isaac, Mohammad Sadeq, Ahmed Refaat Ragab, Marco Andrés Luna, Mohammad Mehdi Ale Eshagh Khoeini, and Pascual Campoy. 2023. "Thrust Vectoring Control for Heavy UAVs, Employing a Redundant Communication System" Sensors 23, no. 12: 5561. https://doi.org/10.3390/s23125561
APA StyleAle Isaac, M. S., Ragab, A. R., Luna, M. A., Ale Eshagh Khoeini, M. M., & Campoy, P. (2023). Thrust Vectoring Control for Heavy UAVs, Employing a Redundant Communication System. Sensors, 23(12), 5561. https://doi.org/10.3390/s23125561