
The Transformer Bridge Principle Circuit Using RF Admittance Technology

Abstract
:1. Introduction
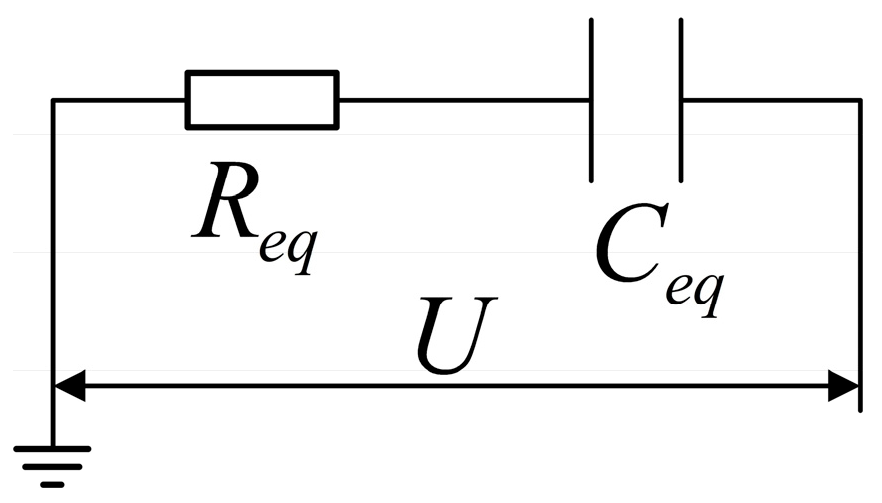
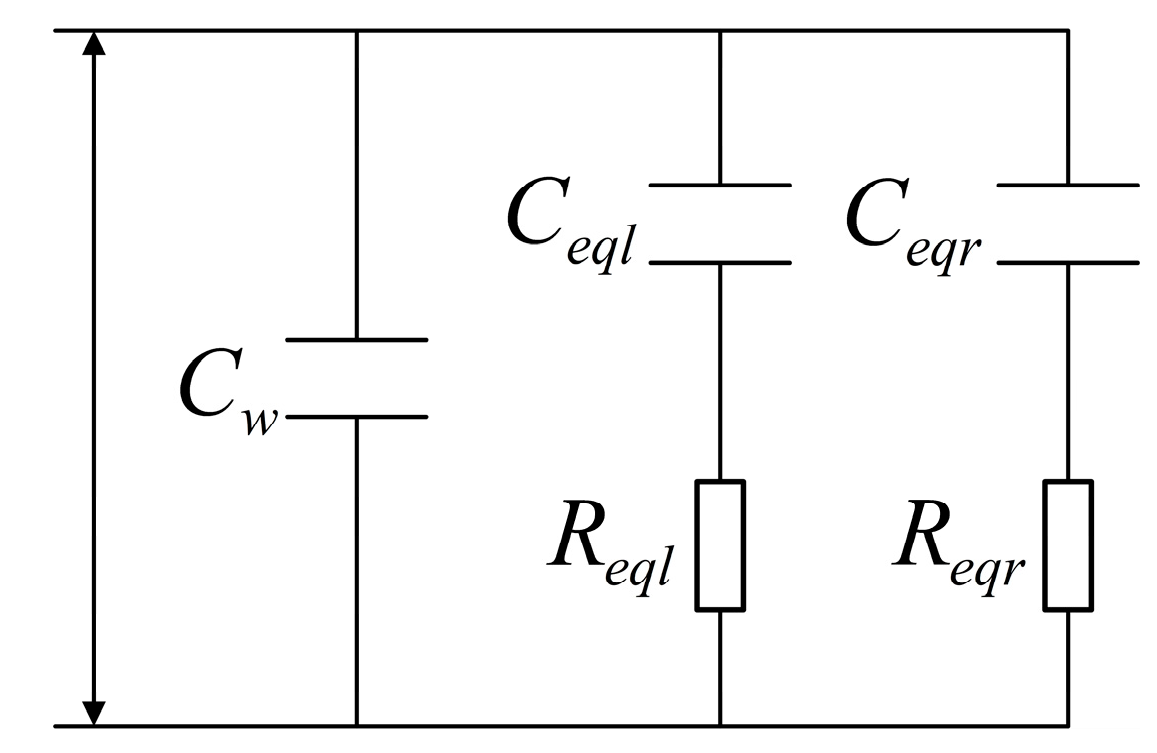
2. Equivalent Circuit Analysis of U-Shaped Liquid Level Sensor with Dirt
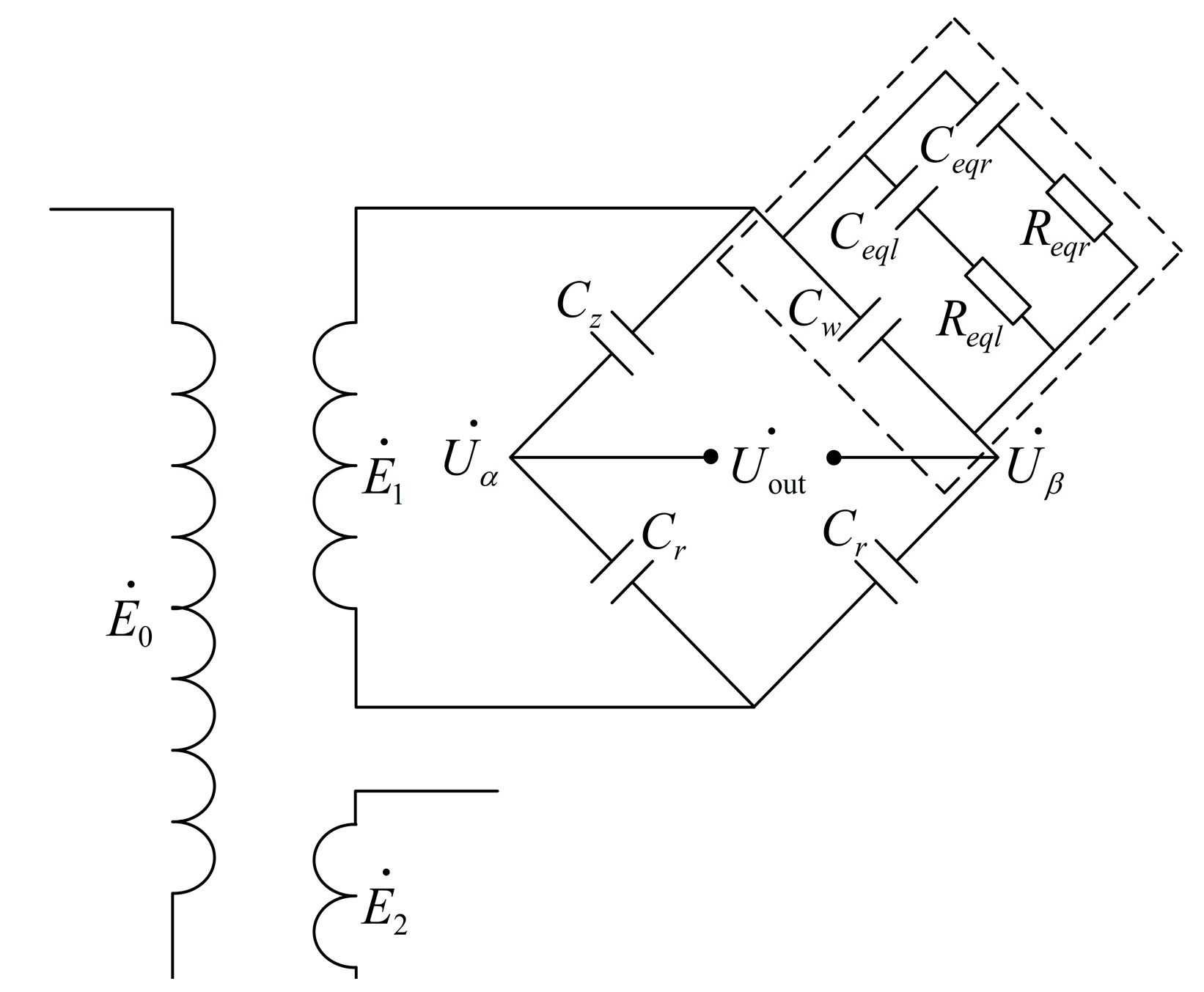
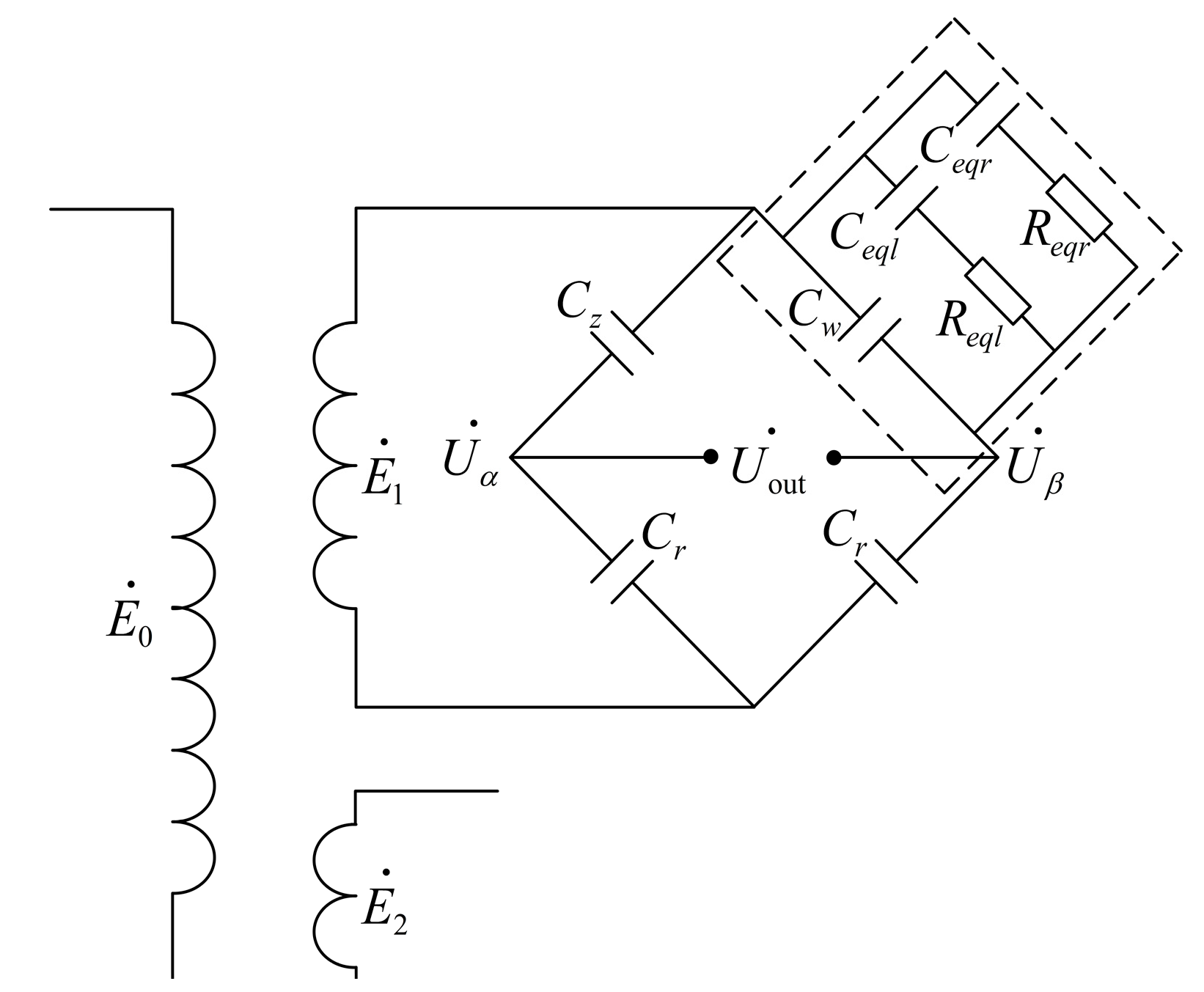
3. Principle Circuit Design of Transformer Bridge
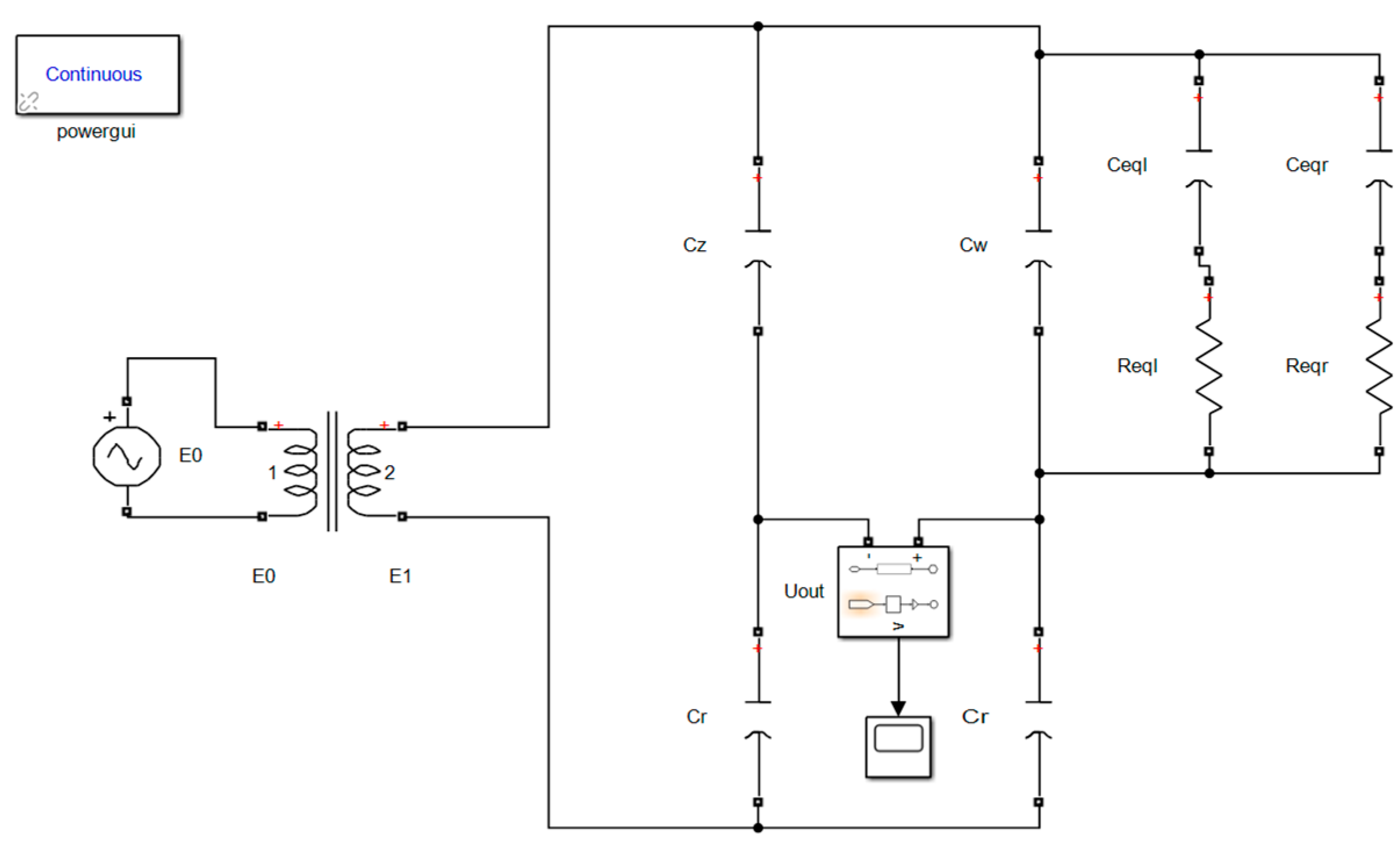
4. The Establishment of Simulation Circuit Model of Transformer Bridge Principle Circuit
| syms t % Define time t % Angular frequency f % Substitute the output signal function expression obtained by fitting a , and set the integral value as a b = Cr; % Enter the value of regulating capacitance c = Cz; % Enter the value of dividing capacitance d = ((12 * sqrt (2) − a) * b * c − a * b * b)/ (a * (b + c) + 12 * sqrt (2) * b); |
5. Simulation Analysis of Transformer Bridge Principle Circuit Parameters and
5.1. The Influence of the Value of Dividing Capacitance on the Measurement Accuracy of Capacitance
5.2. The Influence of the Value of Regulating Capacitance on the Measurement Accuracy of Capacitance
5.3. Circuit Parameters
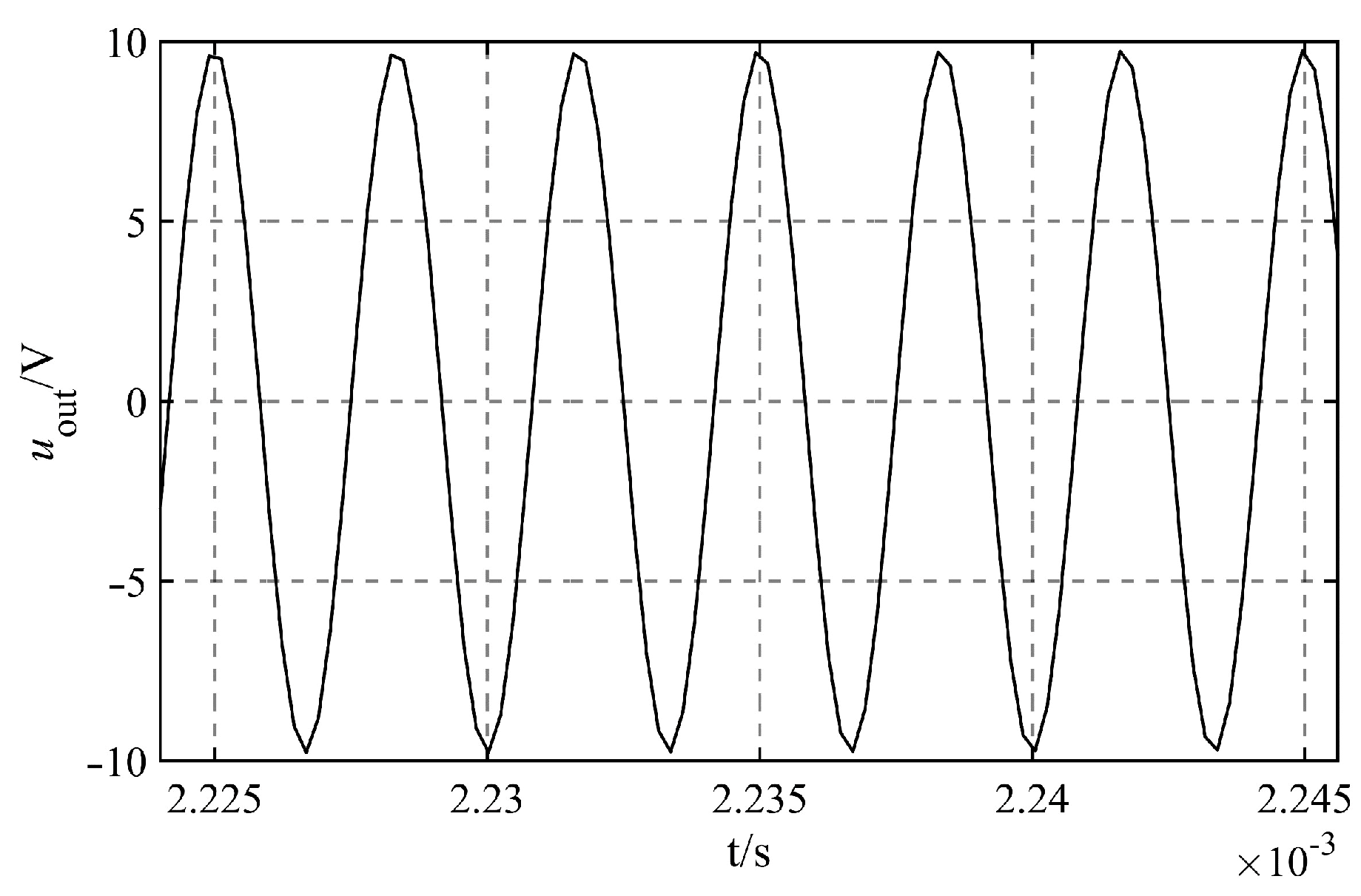
6. Simulation and Verification of Transformer Bridge Principle Circuit
6.1. Simulation Results and Analysis When the Capacitance Changes
6.2. Simulation Results and Analysis When the Length of Attached Seawater Mixture Changes
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, W. Maintenance of Ship Liquid Level Telemetry System. Ship Boat 2019, 30, 128–131. [Google Scholar]
- Shi, H. Design and Development of Software for a Certain Type of Ship’s Liquid Level Telemetry System. Mech. Electr. Inf. 2019, 6, 114–115. [Google Scholar]
- Liu, J.; Gong, S.; Zhang, L.; Zhu, Z.; Yao, X. Application research of multi-sensor fusion technology in ship liquid level monitoring. Ship Sci. Technol. 2021, 43, 157–162. [Google Scholar]
- Zang, T.; Luo, G. Research on Cabin Liquid Level Recognition Algorithm Using Image Processing Technology. Softw. Guide 2021, 20, 139–144. [Google Scholar]
- Cao, L.; Qi, X. Control Items of Ship’s Liquid Level Alarm Device in the Process of Engine Production Design. China Plant Eng. 2020, 17, 123–124. [Google Scholar]
- Li, K.; Hu, Y.; Fang, Y.; Zhang, C.; Rui, X.; Chen, Y. Automatic Adjustment Device on Liquid Level of Non-Treatment Ballast Water System of Ship. Mar. Technol. 2019, 2, 62–67+72. [Google Scholar]
- Zhang, L.; Mao, W.; Liu, J.; Gong, S.; Zhu, Z.; Yao, X.; Kang, T. Design of Marine Liquid Level Measurement and Valve Control Experimental System. Technol. Wind. 2020, 9, 12–13. [Google Scholar]
- Luo, L. Installation and Debugging Analysis of Tank Level Monitoring System. Ship Eng. 2020, 42, 382–384+456. [Google Scholar]
- Yan, H.; Xu, Y.; Gu, J. Principle and Application of a New Type of Radio Frequency Admittance Level Meter. China Instrum. 2022, 4, 76–79. [Google Scholar]
- Wang, H.; Yu, Q. Application of Radio Frequency Admittance Level Meter in Carbon Impregnation Device. Henan Metall. 2020, 28, 51–53. [Google Scholar]
- Bahner, M. Using RF admittance and ultrasonic gap level sensors for spill prevention. ICs-Instrum. Control. Syst. 1995, 68, 29–32. [Google Scholar]
- Mu, L.; Gao, Z. Application of Radio Frequency Admittance Material Level Meter in Petrochemical Enterprises. Process Autom. Instrum. 2006, 1, 52–54. [Google Scholar]
- Yu, Y.; Kang, Q.; Wang, J. Application of radio frequency admittance technology in evaporator liquid level measurement system. Instrum. Cust. 2011, 18, 63–66. [Google Scholar]
- Li, B. Application of RF Admittance Technology in Interface Measurement of Electric Desalination Tank. Autom. Petro-Chem. Ind. 2019, 55, 73–76. [Google Scholar]
- Heywood, N.I.; Tily, P.J. Survey and selection of techniques for slurry level and interface measurement in storage vessels. Hydrotransport 16th International Conference. Scimago J. Ctry. Rank. 2004, 2, 527–544. [Google Scholar]
- Chen, W. Research on Continuous RF Admittance Instrument Abstract. Master’s Thesis, Nanjing Forestry University, Nanjing, China, 2010. [Google Scholar]
- Yu, N. Research and Development of Multi-protocol Digital RF Admittance Level Meter; Huaiyin Institute of Technology: Huai’an, China, 2019. [Google Scholar]
- Zhou, L.; Yang, H.; Wang, C.; Gao, C.; Yang, Y. The Development and Application of KRF Admittance for Level Measurement. China Instrum. 2016, 4, 47–51. [Google Scholar]
- Fan, X.; Zhang, A.; Sun, S. Research on Level Measurement Technology of Rice Wine Fermentation. Mod. Food Sci. Technol. 2018, 34, 219–224,137. [Google Scholar]
- Zhang, C.; Cai, P.; Yang, Z.; Wu, Q. Study on Synchronous Sampling in Technology of RF. Admittance Level Measurement. Instrum. Tech. Sens. 2004, 2, 52–54. [Google Scholar]
- Chen, X.; Chen, L. Study on Level Measurement of the Conductive Material. Chin. J. Sci. Instrum. 2002, 3, 302–304. [Google Scholar]
- Fan, S.; Cai, P. Application of Sample-Integral Theory in RF Admittance Level Measurement. Chin. J. Sens. Actuators 2006, 6, 2540–2543. [Google Scholar]
- Jiang, Z. Application of Sample-Integral Theory in RF Admittance Level Measurement. Mach. Build. Autom. 2009, 38, 95–96+106. [Google Scholar]
- Liu, H.; Zhao, J.; Zhou, L. Research and design of RF admittance level measurement based on chopped wave and time domain integral. J. Electron. Meas. Instrum. 2014, 28, 1005–1012. [Google Scholar]
- Wang, X.; Shan, C.; He, F.; Ji, D. Circuit; China Machine Press: Beijing, China, 2019; pp. 167–176. [Google Scholar]
- Liu, X.; Guo, H. Microwave Technology and Antenna; Xidian University Press: Xi’an, China, 2021; pp. 7–11. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (F) | a0 | a1 | b1 | SSE |
|---|---|---|---|---|
| Theoretical Value of(F) | (F) | Simulation Value of(F) | Relative Error |
|---|---|---|---|
| −0.49% | |||
| 0.29% | |||
| 0.03% | |||
| 0.33% | |||
| −8.19% | |||
| 0.76% | |||
| −0.37% | |||
| 4.39% | |||
| −4.18% | |||
| 3.42% |
| (F) | a0 | a1 | b1 |
|---|---|---|---|
| Theoretical Value of(F) | (F) | Simulation Value of(F) | Relative Error |
|---|---|---|---|
| 0.18% | |||
| −0.01% | |||
| −0.37% | |||
| 3.32% | |||
| −3.28% | |||
| 176.13% |
| Parameter | Value | Unit |
|---|---|---|
| 24 | V | |
| 300,000 | Hz | |
| 12 | V | |
| F | ||
| F |
| (F) | a0 | a1 | b1 |
|---|---|---|---|
| (F) | (F) | Theoretical Value of (F) | Simulation Value of (F) | Relative Error |
|---|---|---|---|---|
| -- | ||||
| −0.07% | ||||
| 0.59% | ||||
| −0.01% | ||||
| 0.15% | ||||
| −0.37% | ||||
| −0.06% | ||||
| 0.26% | ||||
| −0.06% | ||||
| 0.37% | ||||
| −0.03% |
| ll = lr (cm) | (F) | (Ω) |
|---|---|---|
| 0.5 | 241,454.9725 | |
| 4.0 | 30,181.8716 | |
| 8.0 | 15,090.9358 | |
| 12 | 10,060.6239 | |
| 16 | 7,544,679 | |
| 20 | 6036.3743 | |
| 24 | 5030.3119 | |
| 28 | 4311.6959 | |
| 32 | 3772.7339 | |
| 36 | 3353.5413 |
| (cm) | a0 | a1 | b1 |
|---|---|---|---|
| 0.5 | |||
| 4.0 | |||
| 8.0 | |||
| 12 | |||
| 16 | |||
| 20 | |||
| 24 | |||
| 28 | |||
| 32 | |||
| 36 |
| (F) | Simulation Value of(F) | Relative Error | |
|---|---|---|---|
| 0.5 | 0.32% | ||
| 4.0 | −0.05% | ||
| 8.0 | −0.03% | ||
| 12 | −0.08% | ||
| 16 | 0.20% | ||
| 20 | 0.19% | ||
| 24 | −0.39% | ||
| 28 | 0.04% | ||
| 32 | −0.09% | ||
| 36 | −0.04% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Zhang, C.; Guo, W.; Pan, X. The Transformer Bridge Principle Circuit Using RF Admittance Technology. Sensors 2023, 23, 5434. https://doi.org/10.3390/s23125434
Liu F, Zhang C, Guo W, Pan X. The Transformer Bridge Principle Circuit Using RF Admittance Technology. Sensors. 2023; 23(12):5434. https://doi.org/10.3390/s23125434
Chicago/Turabian StyleLiu, Fanfan, Chaojie Zhang, Wenyong Guo, and Xinglong Pan. 2023. "The Transformer Bridge Principle Circuit Using RF Admittance Technology" Sensors 23, no. 12: 5434. https://doi.org/10.3390/s23125434
APA StyleLiu, F., Zhang, C., Guo, W., & Pan, X. (2023). The Transformer Bridge Principle Circuit Using RF Admittance Technology. Sensors, 23(12), 5434. https://doi.org/10.3390/s23125434