
Quasi-Distributed Fiber Sensor-Based Approach for Pipeline Health Monitoring: Generating and Analyzing Physics-Based Simulation Datasets for Classification

 , and
, and 
Abstract
1. Introduction
2. Physics-Based Modeling Enhancing Guided Wave Approaches
- (a)
- The generation of simulated data sets representative of various mechanical damages/defects, incorporating multi-physics constraints such as conservation laws, boundary conditions, and pipeline types.
- (b)
- The simulation of Guided Wave Ultrasonic (GWU) responses and Distributed Acoustic Sensing (DAS) responses in the grey box. This step is crucial as it bridges physics-based modeling and machine learning modeling. Simulated DAS responses, in particular, provide a unique opportunity to train our machine learning model with a rich, nuanced dataset that mimics real-world pipeline defect scenarios.
- (c)
- Pre-processing of the simulated data, which includes noise consideration to account for real-world variabilities and uncertainties.
- (d)
- Training of the machine learning model, using the pre-processed simulated DAS response data. This step is essential for knowledge discovery associated with mechanical damage detection and identification.
- (e)
- Application of the trained model to test data for damage classification, demonstrating the potential of our approach for practical applications.

3. Generating Datasets Using Guided Ultrasonic Wave (UGW) Approaches
3.1. The Excitation Concept of Guided Ultrasonic Waves (UGWs)
3.2. Finite Element Modeling and Wave Propagation Analysis of Steel Pipe Structure
3.3. Wave Propagation Analysis of Steel Pipe Structure
4. Sensor Measurement Model
5. Data Modeling
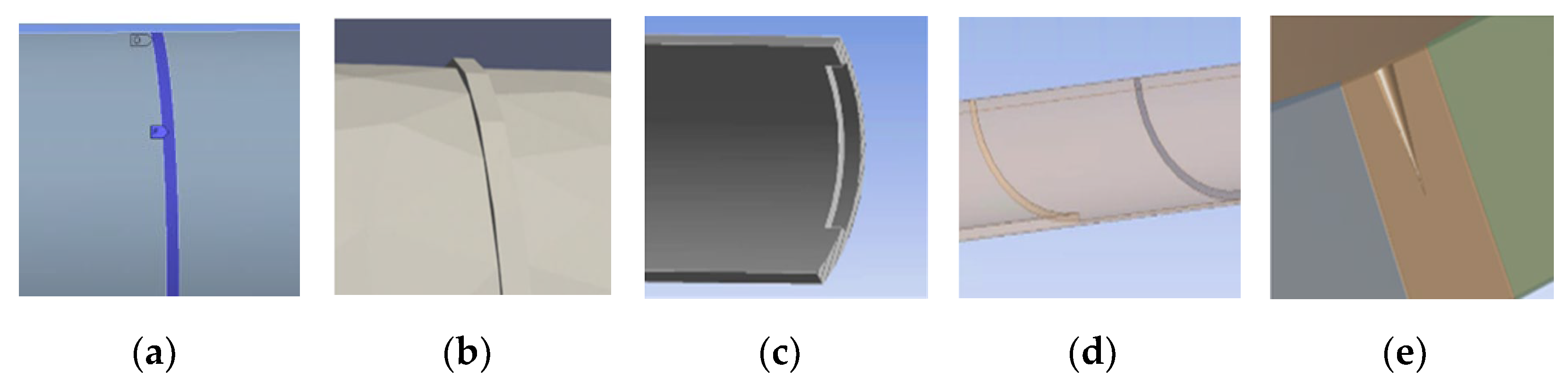
5.1. Simulation Collection for Pipeline Structure Changes
- Clamp: Elastic support loaded by clamps; varying axial length (0.5~5 mm) and stiffness factor (~ N/m).
- Welding: Discontinuity and material property changes between pipeline and welded portion; varying axial length (0.5~5 mm), height (0.5~5 mm).
- Localized Corrosion: Presence of a rectangular notch on the pipeline’s inner surface; varying axial length (25.4~152 mm) and depth (0.5~5 mm).
- General Corrosion: Even reduction in pipeline thickness; varying axial length (0.15~1.5 m) and depth (0.5~5 mm).
- Pitting: Micrometer-scale localized corrosion (pitting); varying radius (0.2~1 mm) and depth (0.5~5 mm).
5.2. Data Pre-Processing
6. Event Recognition
6.1. Comparison of Common CNNs
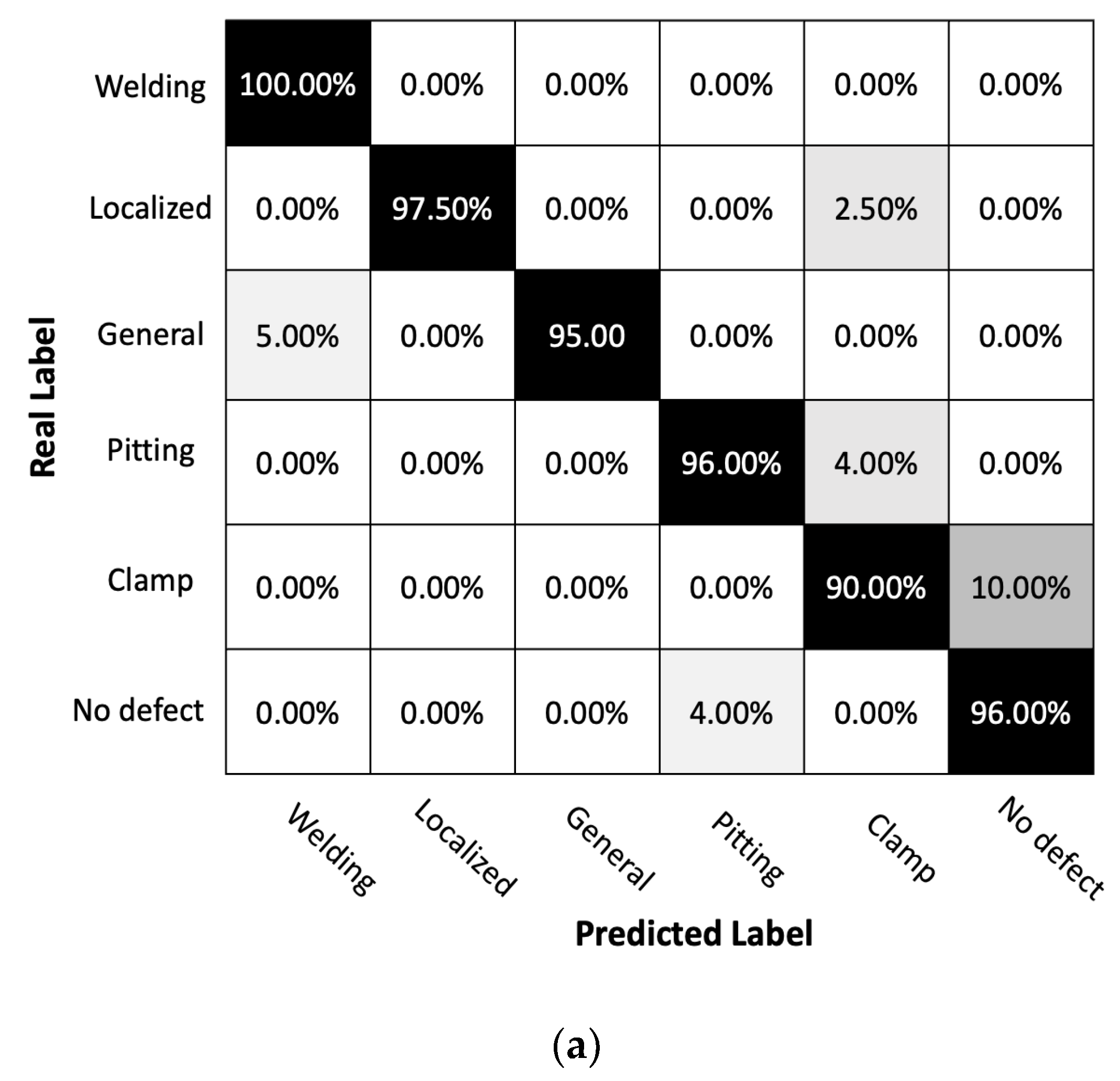
6.2. The Impacts of Classification Accuracy Due to Sensing System to the Robustness of Data Classification
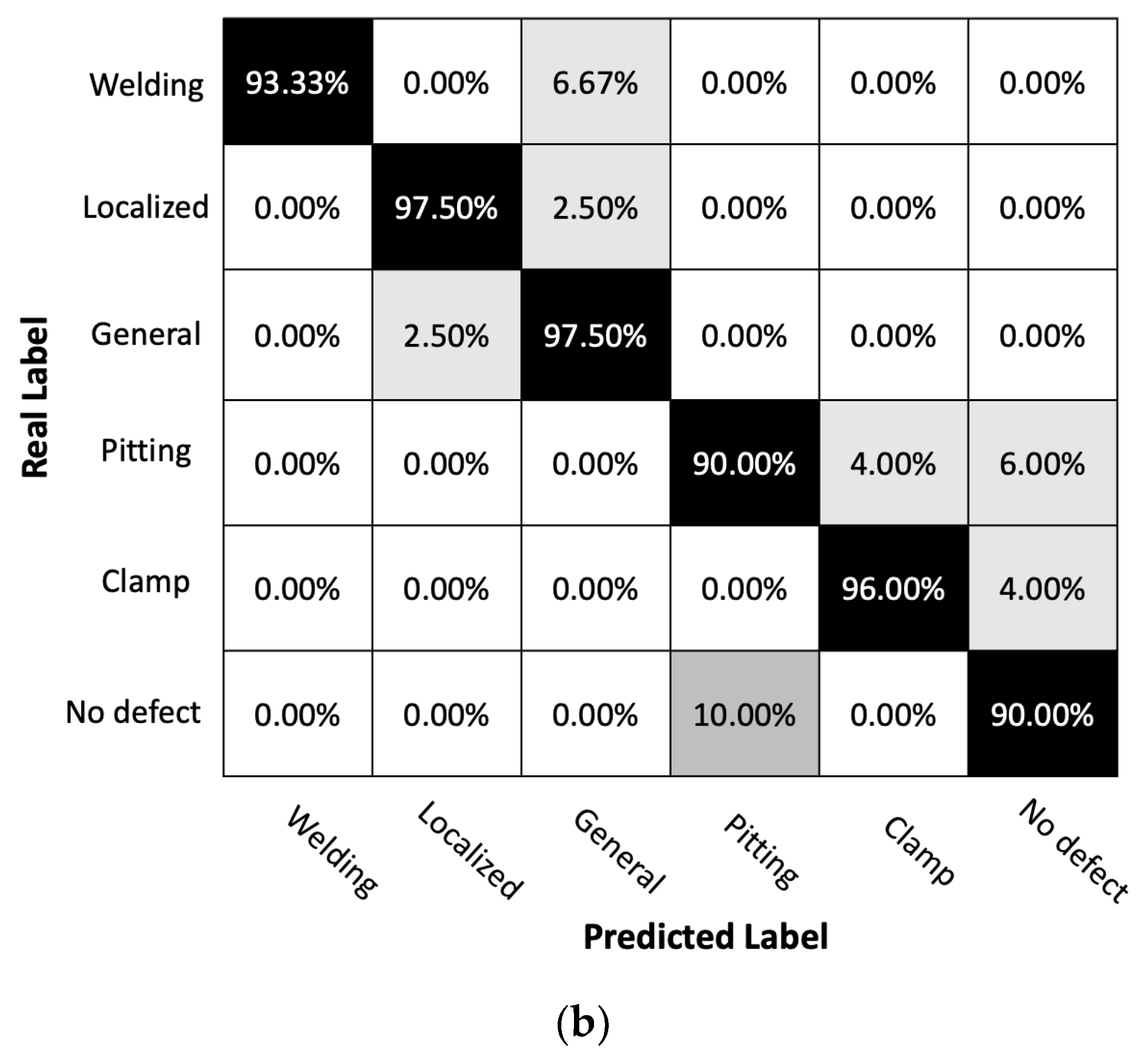
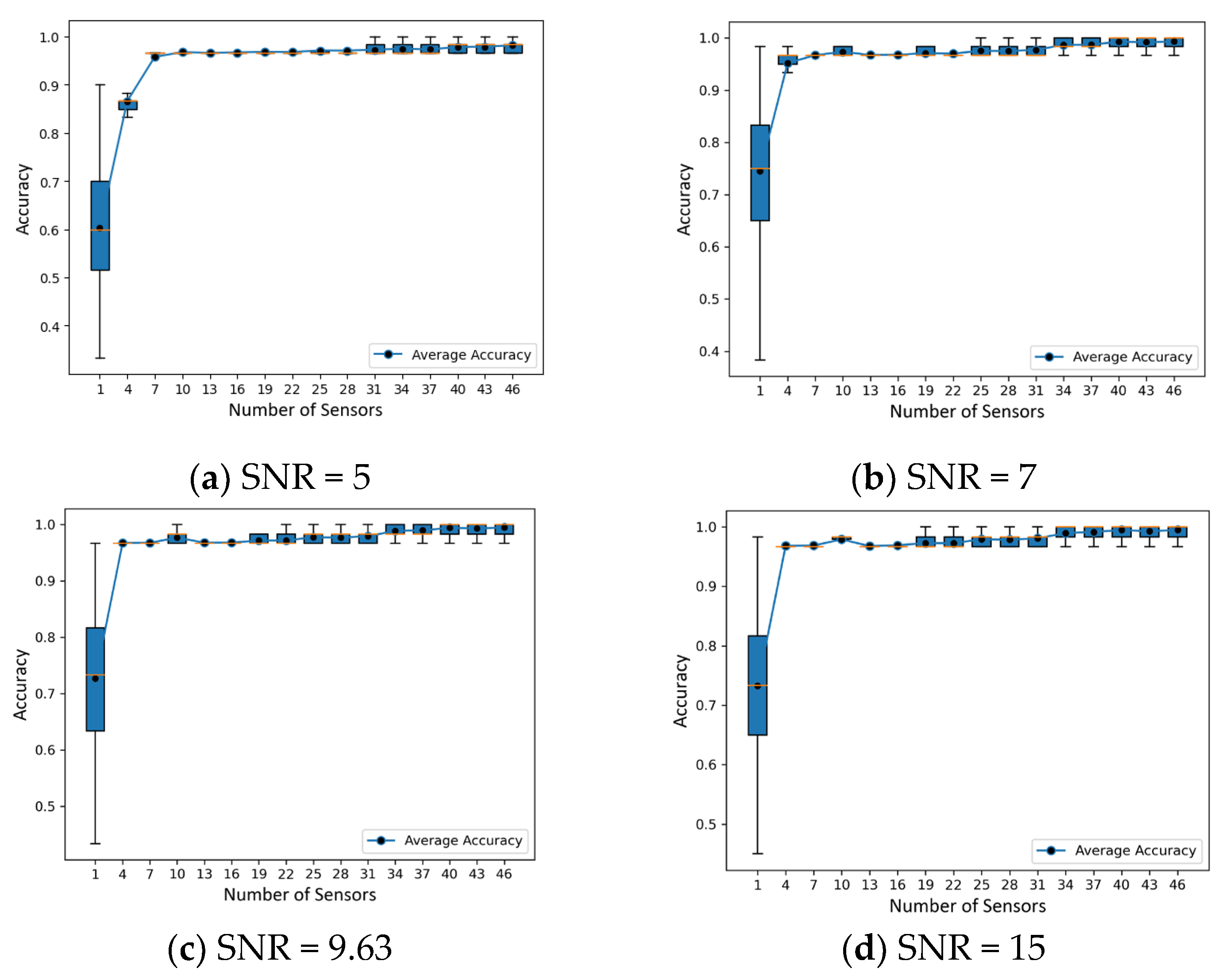
6.3. Analysis of Classification Performance with Noise Effect
6.4. Analysis of Classification Performance with Noise and Varying Quasi-Distributed Sensing
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rezaei, D.; Taheri, F. A novel application of a laser Doppler vibrometer in a health monitoring system. J. Mech. Mater. Struct. 2010, 5, 289–304. [Google Scholar] [CrossRef]
- Seco, F.; Martín, J.M.; Jiménez, A.; Pons, J.L.; Calderón, L.; Ceres, R. PCDISP: A tool for the simulation of wave propagation in cylindrical waveguides. In Ultrasonic Waves; Intech Open Access Publisher: London, UK, 2011. [Google Scholar]
- Gazis, C.D. Three-dimensional investigation of the propagation of waves in hollow circular cylinders. I. Analytical foundation. J. Acoust. Soc. Am. 1959, 31, 568–573. [Google Scholar] [CrossRef]
- Pallarés, F.J.; Betti, M.; Bartoli, G.; Pallarés, L. Structural health monitoring (SHM) and Nondestructive testing (NDT) of slender masonry structures: A practical review. Constr. Build. Mater. 2021, 297, 123768. [Google Scholar] [CrossRef]
- Ohodnicki, P.R.; Zhang, P.; Lalam, N.; Karki, D.; Venketeswaran, A.; Babaee, H.; Wright, R. Fusion of Distributed Fiber Optic Sensing, Acoustic NDE, and Artificial Intelligence for Infrastructure Monitoring. In Proceedings of the 27th International Conference on Optical Fiber Sensors, Alexandria, VA, USA, 29 August–2 September 2022. [Google Scholar] [CrossRef]
- Zhang, P.; Venketeswaran, A.; Wright, R.F.; Denslow, K.; Babaee, H.; Ohodnicki, P.R., Jr. Feature extraction for pipeline defects inspection based upon distributed acoustic fiber optic sensing data. Proc. SPIE Fiber Optic Sens. Appl. XVIII 2022, 12105, 14–29. [Google Scholar] [CrossRef]
- Stajanca, P.; Chruscicki, S.; Homann, T.; Seifert, S.; Schmidt, D.; Habib, A. Detection of Leak-Induced Pipeline Vibrations Using Fiber—Optic Distributed Acoustic Sensing. Sensors 2018, 18, 2841. [Google Scholar] [CrossRef]
- Lu, P.; Chen, Q. Fiber Bragg grating sensor for simultaneous measurement of flow rate and direction. Meas. Sci. Technol. 2008, 19, 125302. [Google Scholar] [CrossRef]
- Gao, X.-X.; Cui, J.-M.; Ai, M.-Z.; Huang, Y.-F.; Li, C.-F.; Guo, G.-C. An Acoustic Sensor Based on Active Fiber Fabry–Pérot Microcavities. Sensors 2020, 20, 5760. [Google Scholar] [CrossRef]
- Lalam, N.; Wright, R.F.; Ohodnicki, P.R. Pipeline monitoring based on ultrasonic guided acoustic wave and fiber optic sensor fusion. In Fiber Optic Sensors and Applications XVIII; Lieberman, R.A., Sanders, G.A., Scheel, I.U., Eds.; SPIE: Bellingham, WA, USA, 2022; p. 1210509. [Google Scholar] [CrossRef]
- Choban, T.; Zhirnov, A.; Stepanov, K.; Khan, R.; Koshelev, K.; Pnev, A.; Karasik, V. Sensitivity of Distributed Acoustic Sensor Based on Sagnac Interferometer. In Proceedings of the 2022 International Conference Laser Optics (ICLO), St. Petersburg, Russia, 1–5 July 2022. [Google Scholar]
- Zhu, W.; Li, D.; Liu, J.; Wang, R. Membrane-free acoustic sensing based on an optical fiber Mach–Zehnder interferometer. Appl. Opt. 2020, 59, 1775–1779. [Google Scholar] [CrossRef]
- Tong, Y.; Dong, H.; Wang, Y.; Sun, W.; Wang, X.; Bai, J.; Yuan, H.; Zhu, N.; Liu, J. Distributed incomplete polarization-OTDR based on polarization maintaining fiber for multi-event detection. Opt. Commun. 2015, 357, 41–44. [Google Scholar] [CrossRef]
- Liokumovich, L.B.; Ushakov, N.A.; Kotov, O.I.; Bisyarin, M.A.; Hartog, A.H. Fundamentals of Optical Fiber Sensing Schemes Based on Coherent Optical Time Domain Reflectometry: Signal Model Under Static Fiber Conditions. J. Light. Technol. 2015, 33, 3660–3671. [Google Scholar] [CrossRef]
- Shatalin, S.V.; Treschikov, V.N.; Rogers, A.J. Interferometric optical time-domain reflectometry for distributed optical-fiber sensing. Appl. Opt. 1998, 37, 5600–5604. [Google Scholar] [CrossRef] [PubMed]
- Lu, P.; Lalam, N.; Badar, M.; Liu, B.; Chorpening, B.T.; Buric, M.P.; Ohodnicki, P. Distributed optical fiber sensing: Review and perspective. Appl. Phys. Rev. 2019, 6, 041302. [Google Scholar] [CrossRef]
- Venketeswaran, A.; Lalam, N.; Wuenschell, J.; Ohodnicki, P.R.; Badar, M.; Chen, K.P.; Lu, P.; Duan, Y.; Chorpening, B.; Buric, M. Recent Advances in Machine Learning for Fiber Optic Sensor Applications. Adv. Intell. Syst. 2022, 4, 2100067. [Google Scholar] [CrossRef]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Corredera, P.; Martin-Lopez, S. Machine Learning Methods for Pipeline Surveillance Systems Based on Distributed Acoustic Sensing: A Review. Appl. Sci. 2017, 7, 841. [Google Scholar] [CrossRef]
- Bouzenad, A.E.; El Mountassir, M.; Yaacoubi, S.; Dahmene, F.; Koabaz, M.; Buchheit, L.; Ke, W. A Semi-Supervised Based K-Means Algorithm for Optimal Guided Waves Structural Health Monitoring: A Case Study. Inventions 2019, 4, 17. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Zhao, L.; Fan, Z. An Event Recognition Method for Φ-OTDR Sensing System Based on Deep Learning. Sensors 2019, 19, 3421. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Zhang, Z.; Jiang, F.; Zhang, X. An event recognition method for fiber distributed acoustic sensing systems based on the combination of MFCC and CNN. In Proceedings of the International Conference on Optical Instruments and Technology: Optical Sensors and Applications, Beijing, China, 28–30 October 2017. [Google Scholar] [CrossRef]
- Sun, M.; Yu, M.; Lv, P.; Li, A.; Wang, H.; Zhang, X.; Fan, T.; Zhang, T. Man-Made Threat Event Recognition Based on Distributed Optical Fiber Vibration Sensing and SE-WaveNet. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Gardner, P.; Liu, X.; Worden, K. On the application of domain adaptation in structural health monitoring. Mech. Syst. Signal Process. 2020, 138, 106550. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring: With Piezoelectric Wafer Active Sensors; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Ahmed, M.N. A Study of Guided Ultrasonic Wave Propagation Characteristics in Thin Aluminum Plate for Damage Detection; The University of Toledo: Toledo, OH, USA, 2014. [Google Scholar]
- Su, Z.; Ye, L. Lamb wave-based quantitative identification of delamination in composite laminates. In Delamination Behaviour of Composites; Sridharan, S., Ed.; Woodhead Publishing Series in Composites Science and Engineering; Woodhead Publishing: Cambridge, UK, 2008; pp. 169–216. [Google Scholar] [CrossRef]
- Gresil, M.; Shen, Y.; Giurgiutiu, V. Predictive modeling of ultrasonics SHM with PWAS transducers. In Proceedings of the 8th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 13–15 September 2011. [Google Scholar]
- Yan, S.; Li, Y.; Zhang, S.; Song, G.; Zhao, P. Pipeline Damage Detection Using Piezoceramic Transducers: Numerical Analyses with Experimental Validation. Sensors 2018, 18, 2106. [Google Scholar] [CrossRef]
- Zhang, Z.; Pan, H.; Wang, X.; Lin, Z. Machine Learning-Enriched Lamb Wave Approaches for Automated Damage Detection. Sensors 2020, 20, 1790. [Google Scholar] [CrossRef]
- Mahajan, H.; Banerjee, S. A machine learning framework for guided wave-based damage detection of rail head using surface-bonded piezo-electric wafer transducers. Mach. Learn. Appl. 2021, 7, 100216. [Google Scholar] [CrossRef]
- Lowe, P.; Sanderson, R.; Pedram, S.; Boulgouris, N.; Mudge, P. Inspection of Pipelines Using the First Longitudinal Guided Wave Mode. Phys. Procedia 2015, 70, 338–342. [Google Scholar] [CrossRef]
- Moser, F.; Jacobs, L.J.; Qu, J. Modeling elastic wave propagation in waveguides with the finite element method. NDT E Int. 1999, 32, 225–234. [Google Scholar] [CrossRef]
- Wilcox, P.D.; Lowe, M.J.S.; Cawley, P. Mode and Transducer Selection for Long Range Lamb Wave Inspection. J. Intell. Mater. Syst. Struct. 2001, 12, 553–565. [Google Scholar] [CrossRef]
- Dean, T.; Cuny, T.; Hartog, A.H. The effect of gauge length on axially incident P-waves measured using fibre optic distributed vibration sensing. Geophys. Prospect. 2016, 65, 184–193. [Google Scholar] [CrossRef]
- Aliofkhazraei, A.M.; Afroukhteh, S. A comprehensive review on internal corrosion and cracking of oil and gas pipelines. J. Nat. Gas Sci. Eng. 2019, 71, 102971. [Google Scholar] [CrossRef]
- Ölçer, İ.; Öncü, A. Adaptive temporal matched filtering for noise suppression in fiber optic distributed acoustic sensing. Sensors 2017, 17, 1288. [Google Scholar] [CrossRef] [PubMed]
- Lalam, N.; Westbrook, P.S.; Li, J.; Lu, P.; Buric, M.P. Phase-Sensitive Optical Time Domain Reflectometry With Rayleigh Enhanced Optical Fiber. IEEE Access 2021, 9, 114428–114434. [Google Scholar] [CrossRef]
- Hu, J.; Xia, G.-S.; Hu, F.; Sun, H.; Zhang, L. A comparative study of sampling analysis in scene classification of high-resolution remote sensing imagery. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2389–2392. [Google Scholar] [CrossRef]
- Cohen, G.; Afshar, S.; Orchard, G.; Tapson, J.; Benosman, R.; van Schaik, A. Spatial and Temporal Downsampling in Event-Based Visual Classification. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5030–5044. [Google Scholar] [CrossRef]
- Kang, J.-M.; Kim, I.-M.; Lee, S.; Ryu, D.-W.; Kwon, J. A Deep CNN-Based Ground Vibration Monitoring Scheme for MEMS Sensed Data. IEEE Geosci. Remote Sens. Lett. 2019, 17, 347–351. [Google Scholar] [CrossRef]
- Nakagome, S.; Luu, T.P.; He, Y.; Ravindran, A.S.; Contreras-Vidal, J.L. An empirical comparison of neural networks and machine learning algorithms for EEG gait decoding. Sci. Rep. 2020, 10, 4372. [Google Scholar] [CrossRef] [PubMed]
- Brunton, B.W.; Brunton, S.L.; Proctor, J.L.; Kutz, J.N. Sparse Sensor Placement Optimization for Classification. SIAM J. Appl. Math. 2016, 76, 2099–2122. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length (m) | Outside Diameter (m) | Wall Thickness (m) |
|---|---|---|
| 2.44 | 0.3 | 0.013 |
| Material | Density () | Young’s Modules () | Poisson Ratio () |
|---|---|---|---|
| 7850 | 0.32 |
| Pipe Feature | Clamp | Welding | Localized Corrosion | General Corrosion | Pitting |
|---|---|---|---|---|---|
| Variable | Axial length: (0.5~5 mm) Stiffness factor: (~ N/m) | Axial length: (0.5~5 mm) height: (0.5~5 mm) | Axial length: (25.4~152 mm), Depth: (0.5~5 mm) | Axial length: (0.15~1.5 m) Depth: (0.15~5 mm) | Radius: (0.2~1 mm) Depth: (0.5~5 mm) |
| Case Number 1 | 20 | 30 | 40 | 40 | 25 |
| Description | Elastic support loaded by clamps (blue region); | Discontinuity and material property changes between the pipeline and the welded portion | A rectangular notch on the inner surface of the pipeline, indicating presence of corrosion in a specific area. | Even reduction in pipeline thickness | Micrometer-scale localized corrosion of a specific type |
| Fully Distributed | Quasi-Distributed | |||||
|---|---|---|---|---|---|---|
| Classification report | Precision | Recall | FNR | Precision | Recall | FNR |
| Welding | 100.00% | 96.67% | 3.33% | 100.00% | 96.67% | 3.33% |
| Localized corrosion | 100.00% | 100.00% | 0.00% | 100.00% | 100.00% | 0.00% |
| General corrosion | 100.00% | 100.00% | 0.00% | 100.00% | 100.00% | 0.00% |
| Pitting corrosion | 96.00% | 96.00% | 4.00% | 96.67% | 92.00% | 8.00% |
| Clamp | 94.34% | 100.00% | 0.00% | 96.00% | 96.00% | 4.00% |
| No defect | 96.00% | 96.00% | 4.00% | 92.31% | 96.00% | 4.00% |
| Fully Distributed | Quasi-Distributed | |||||
|---|---|---|---|---|---|---|
| Classification report | Precision | Recall | FNR | Precision | Recall | FNR |
| Welding | 95.24% | 100.00% | 0.00% | 100.00% | 93.33% | 6.67% |
| Localized corrosion | 100.00% | 97.5% | 2.50% | 97.50% | 97.50% | 2.50% |
| General corrosion | 100.00% | 100.00% | 0.00% | 93.94% | 97.50% | 2.50% |
| Pitting corrosion | 96.00% | 100.00% | 0.00% | 90.00% | 90.00% | 10.00% |
| Clamp | 94.34% | 90.00% | 10.00% | 96.00% | 96.00% | 4.00% |
| No defect | 100.00% | 96.00% | 4.00% | 90.00% | 90.00% | 10.00% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Venketeswaran, A.; Wright, R.F.; Lalam, N.; Sarcinelli, E.; Ohodnicki, P.R. Quasi-Distributed Fiber Sensor-Based Approach for Pipeline Health Monitoring: Generating and Analyzing Physics-Based Simulation Datasets for Classification. Sensors 2023, 23, 5410. https://doi.org/10.3390/s23125410
Zhang P, Venketeswaran A, Wright RF, Lalam N, Sarcinelli E, Ohodnicki PR. Quasi-Distributed Fiber Sensor-Based Approach for Pipeline Health Monitoring: Generating and Analyzing Physics-Based Simulation Datasets for Classification. Sensors. 2023; 23(12):5410. https://doi.org/10.3390/s23125410
Chicago/Turabian StyleZhang, Pengdi, Abhishek Venketeswaran, Ruishu F. Wright, Nageswara Lalam, Enrico Sarcinelli, and Paul R. Ohodnicki. 2023. "Quasi-Distributed Fiber Sensor-Based Approach for Pipeline Health Monitoring: Generating and Analyzing Physics-Based Simulation Datasets for Classification" Sensors 23, no. 12: 5410. https://doi.org/10.3390/s23125410
APA StyleZhang, P., Venketeswaran, A., Wright, R. F., Lalam, N., Sarcinelli, E., & Ohodnicki, P. R. (2023). Quasi-Distributed Fiber Sensor-Based Approach for Pipeline Health Monitoring: Generating and Analyzing Physics-Based Simulation Datasets for Classification. Sensors, 23(12), 5410. https://doi.org/10.3390/s23125410