


Attention Recurrent Neural Network-Based Severity Estimation Method for Early-Stage Fault Diagnosis in Robot Harness Cable



Abstract
:1. Introduction
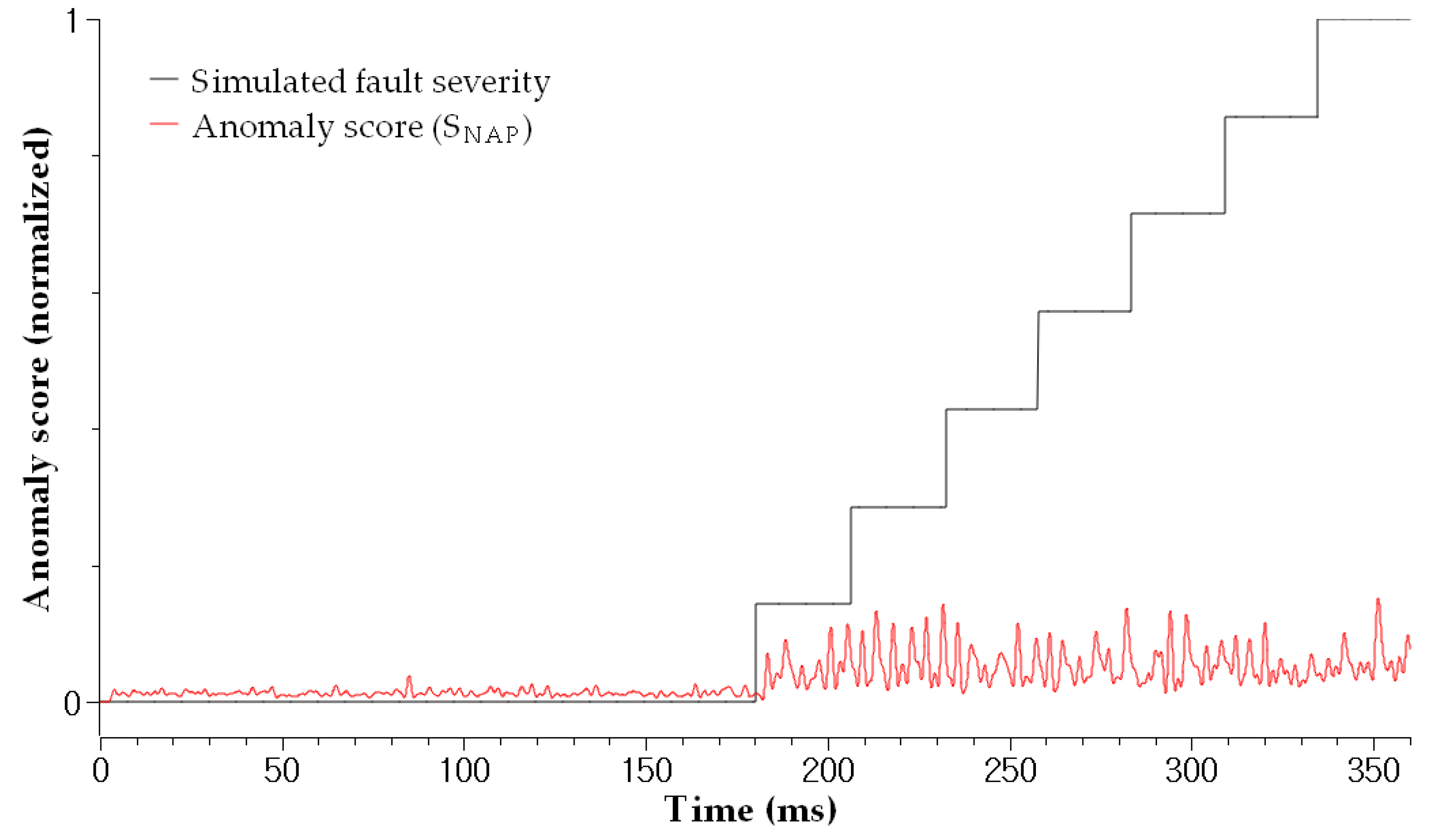
- The method could diagnose an early-stage fault in a cable by estimating the soft fault severity before the fault become permanent state; that is, a hard fault.
- In contrast with reference signal-based methods, in this method, the need to design a reference signal and consider physical cable parameters is eliminated because only three-phase currents are required to conduct diagnosis.
- The method is reliable under various operating conditions that may result from irregular machine operation as well as various fault conditions that range from mild to severe.
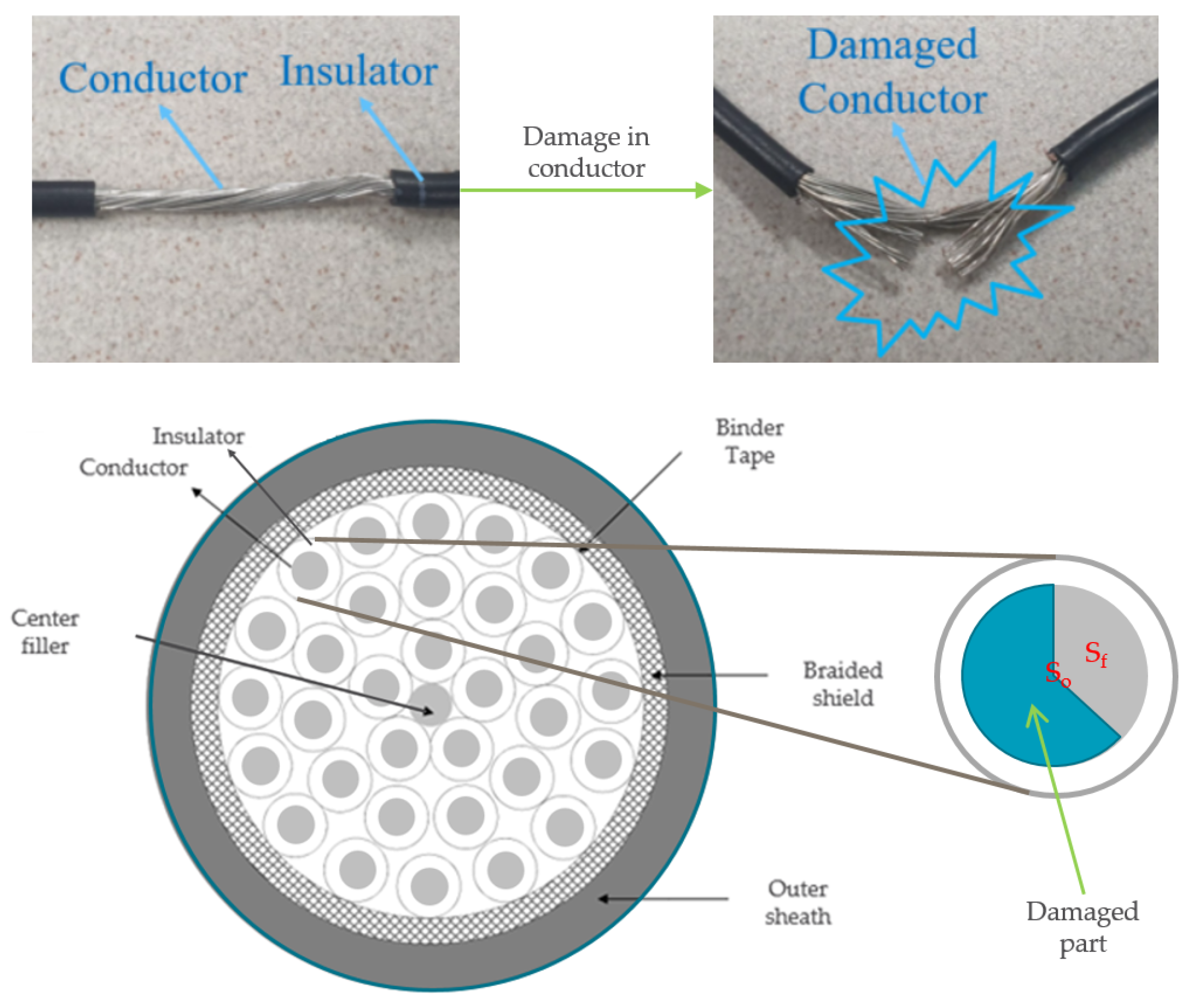
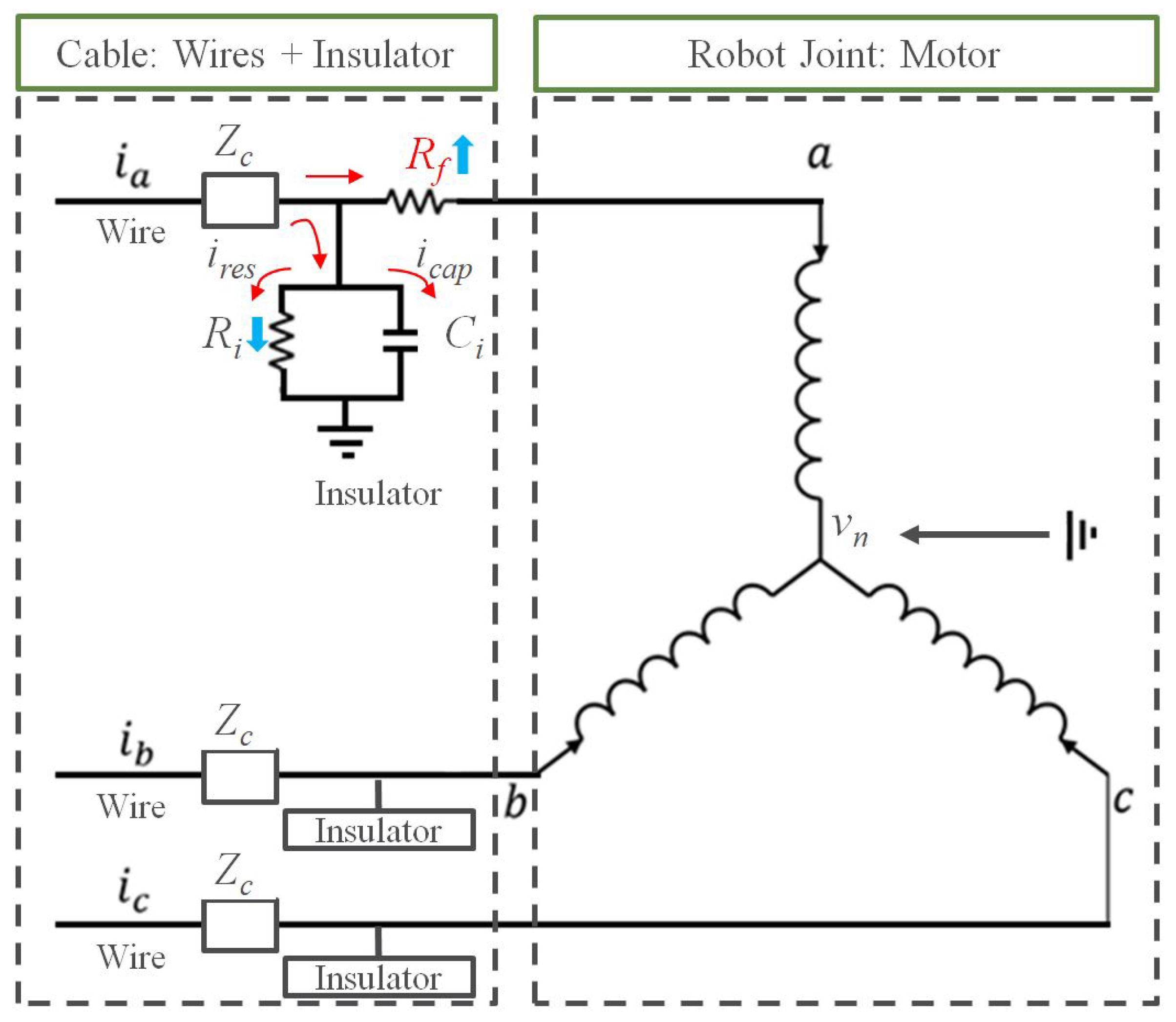
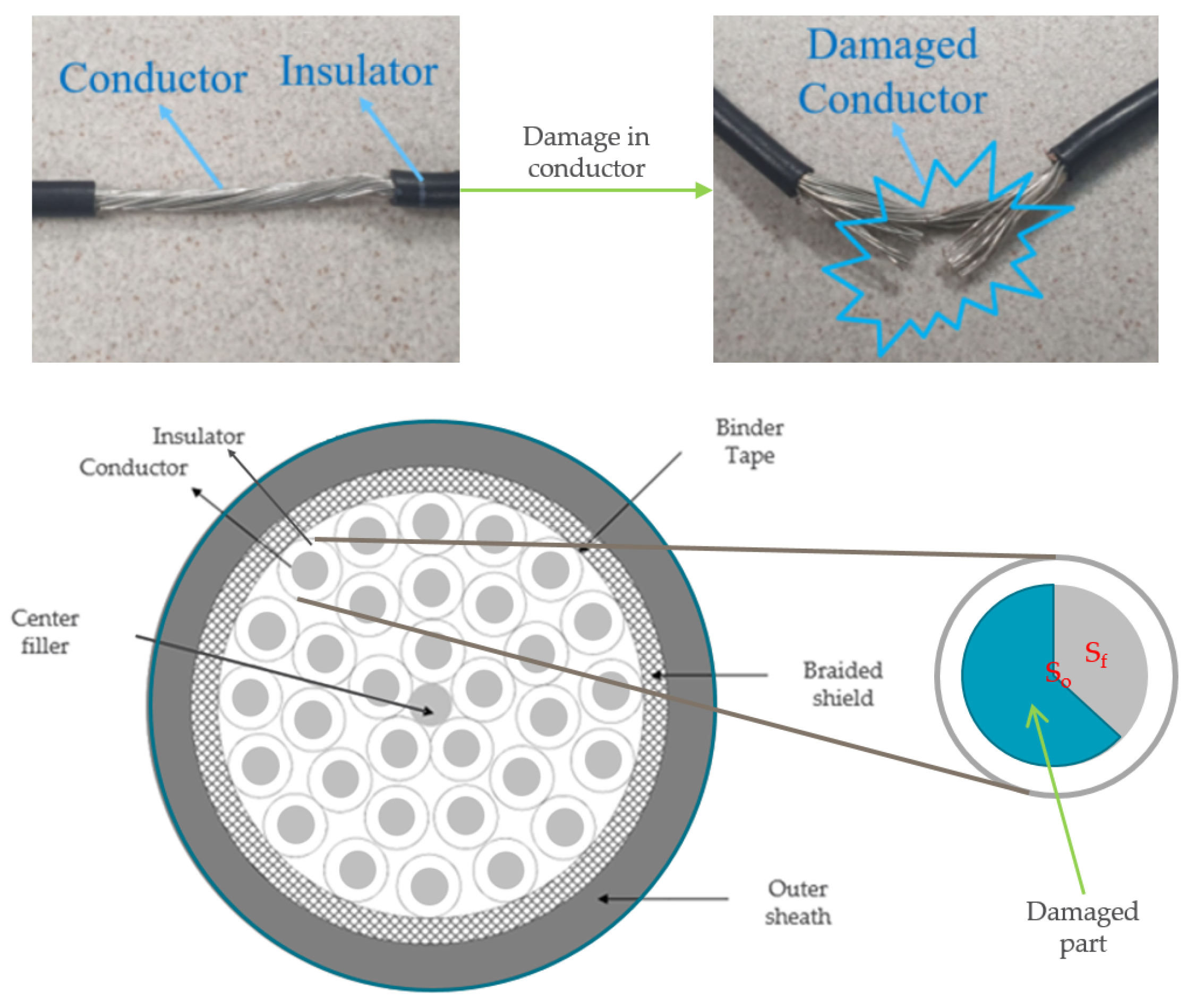
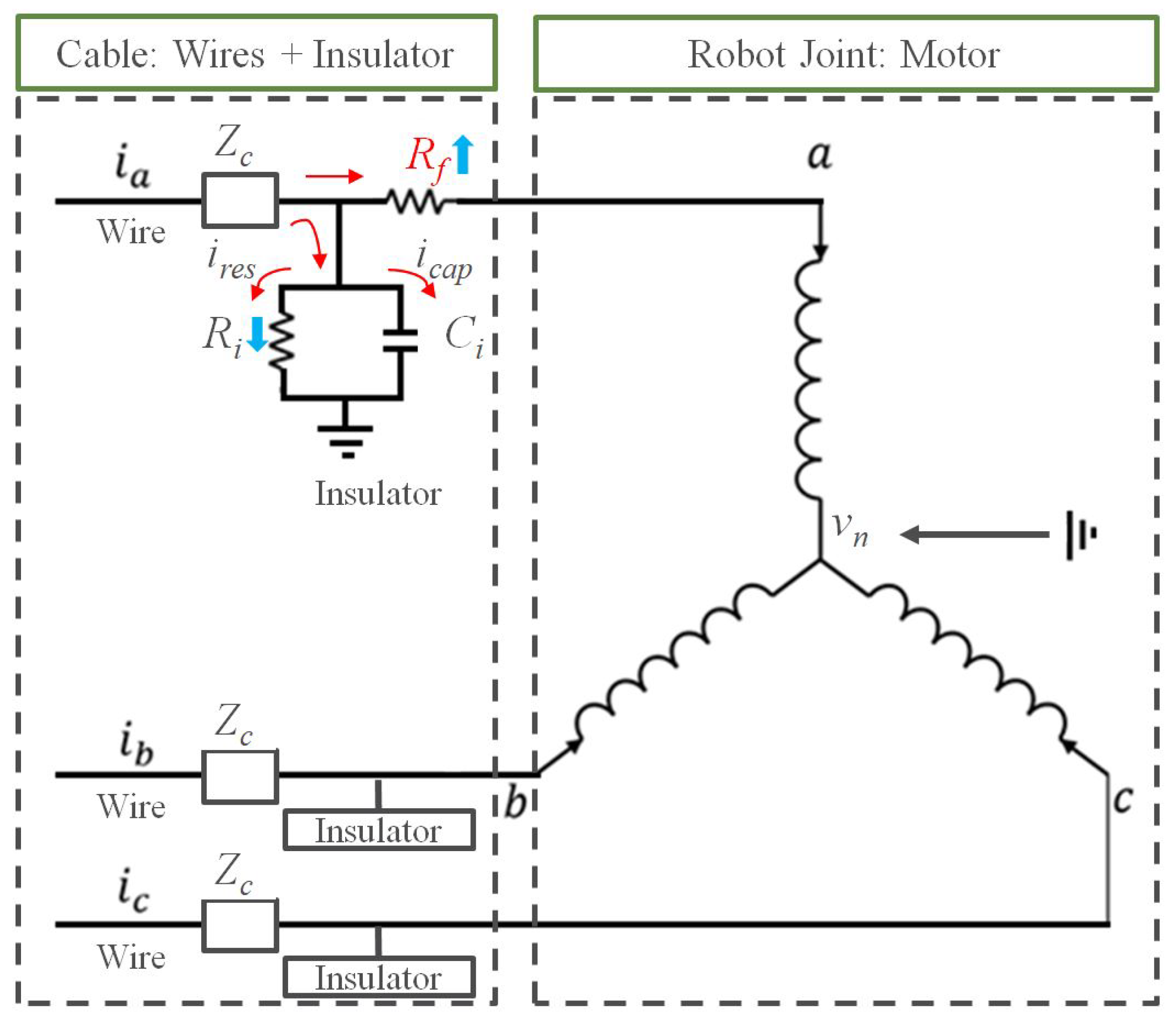
2. Soft Fault in Cable
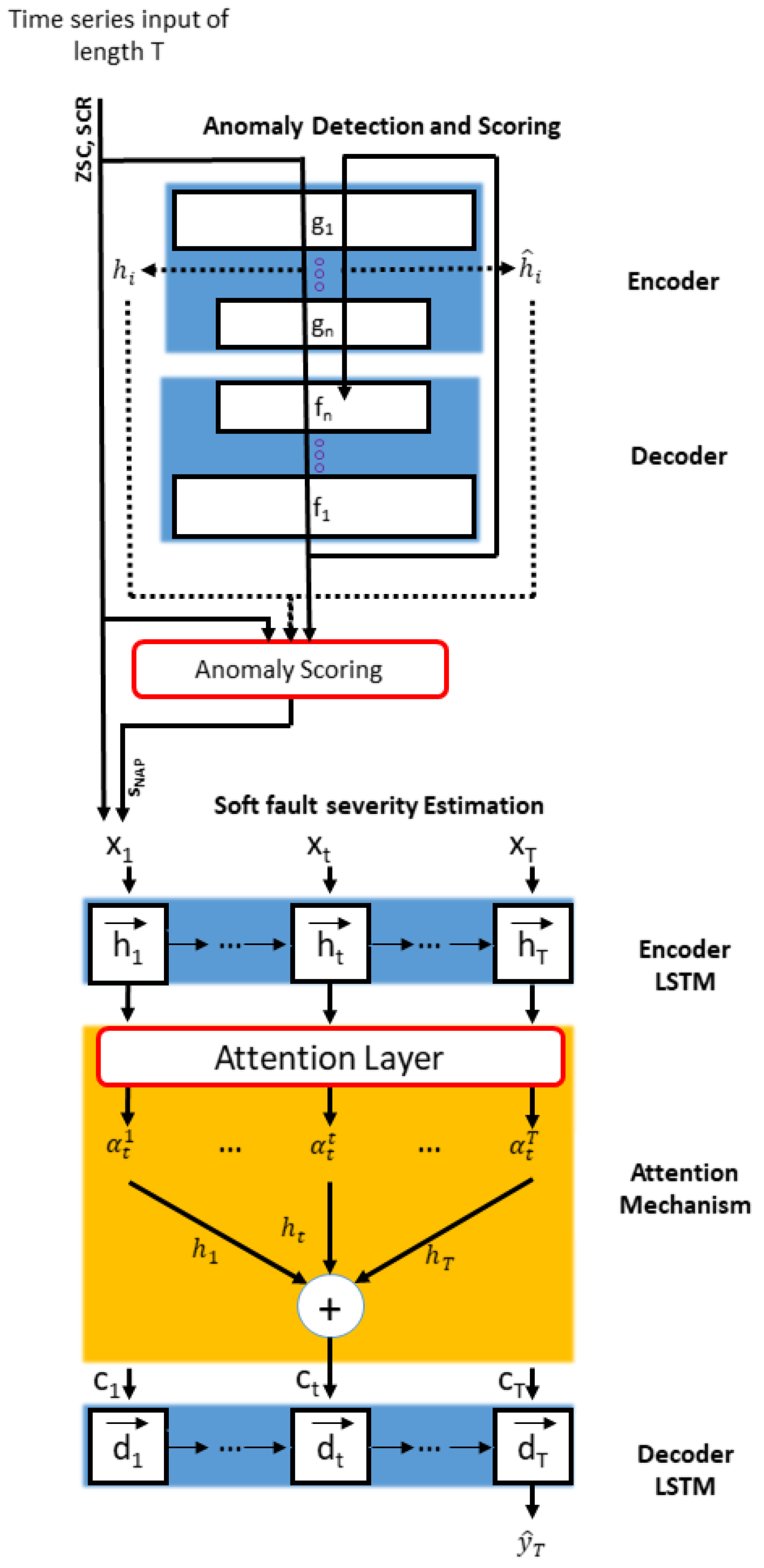
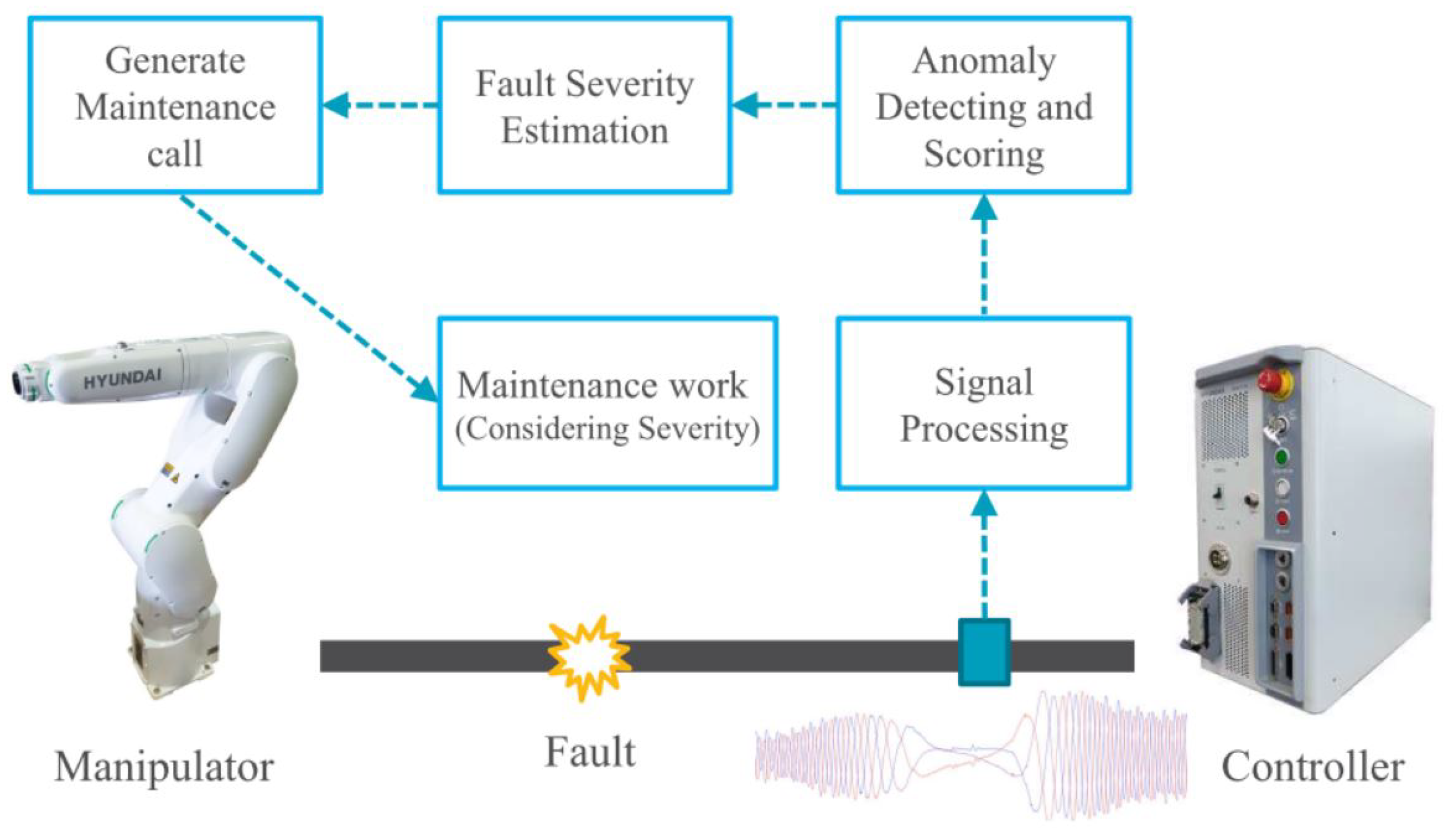
3. Soft Fault Diagnosis System Structure
3.1. Anomaly Scoring with Autoencoder
3.2. Fault Severity Estimation with Attention Mechanism
3.3. Training Procedure
3.4. Structure of Diagnosis System
4. Experimental Results
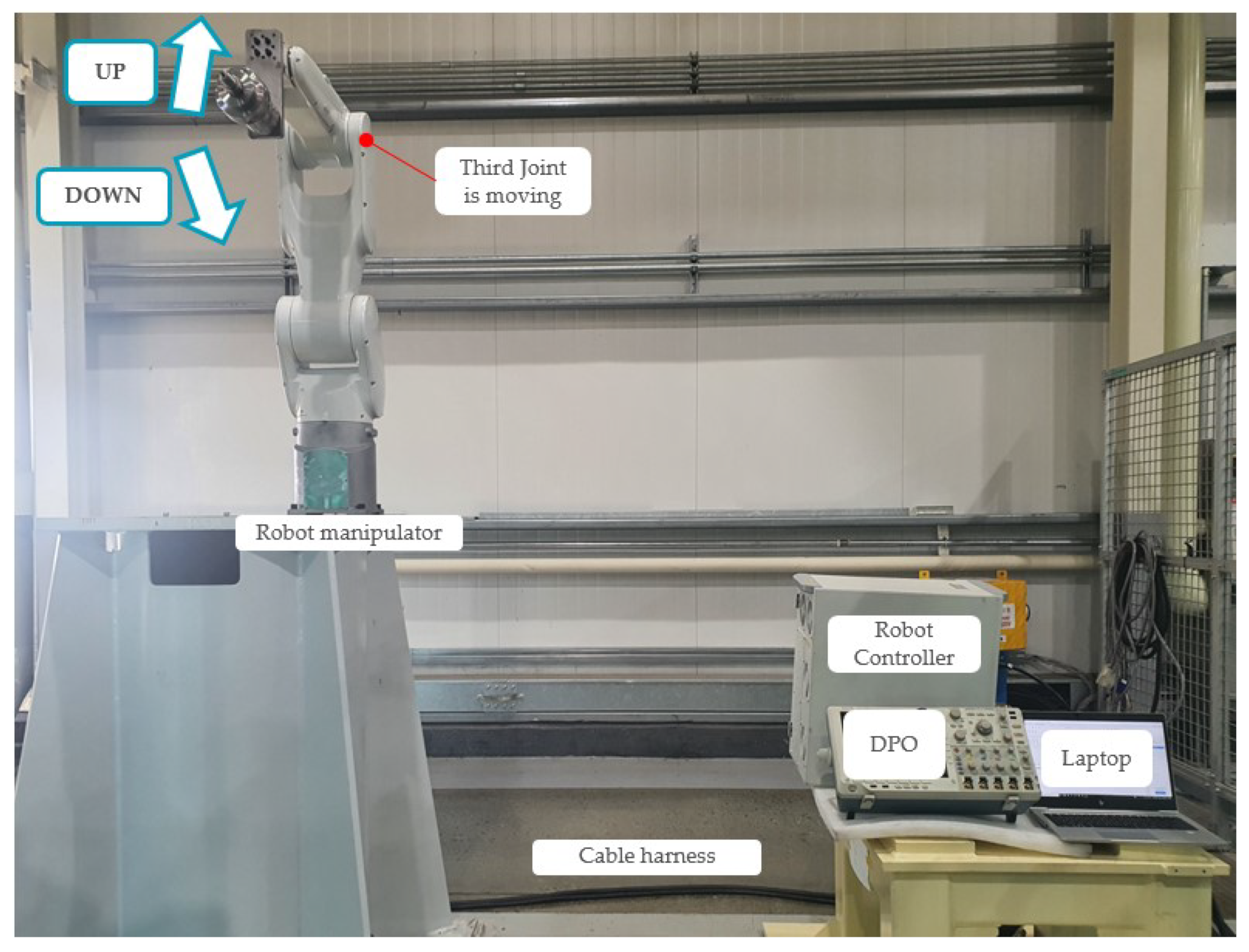
4.1. Experimental Setup
4.2. Experimental Scenarios
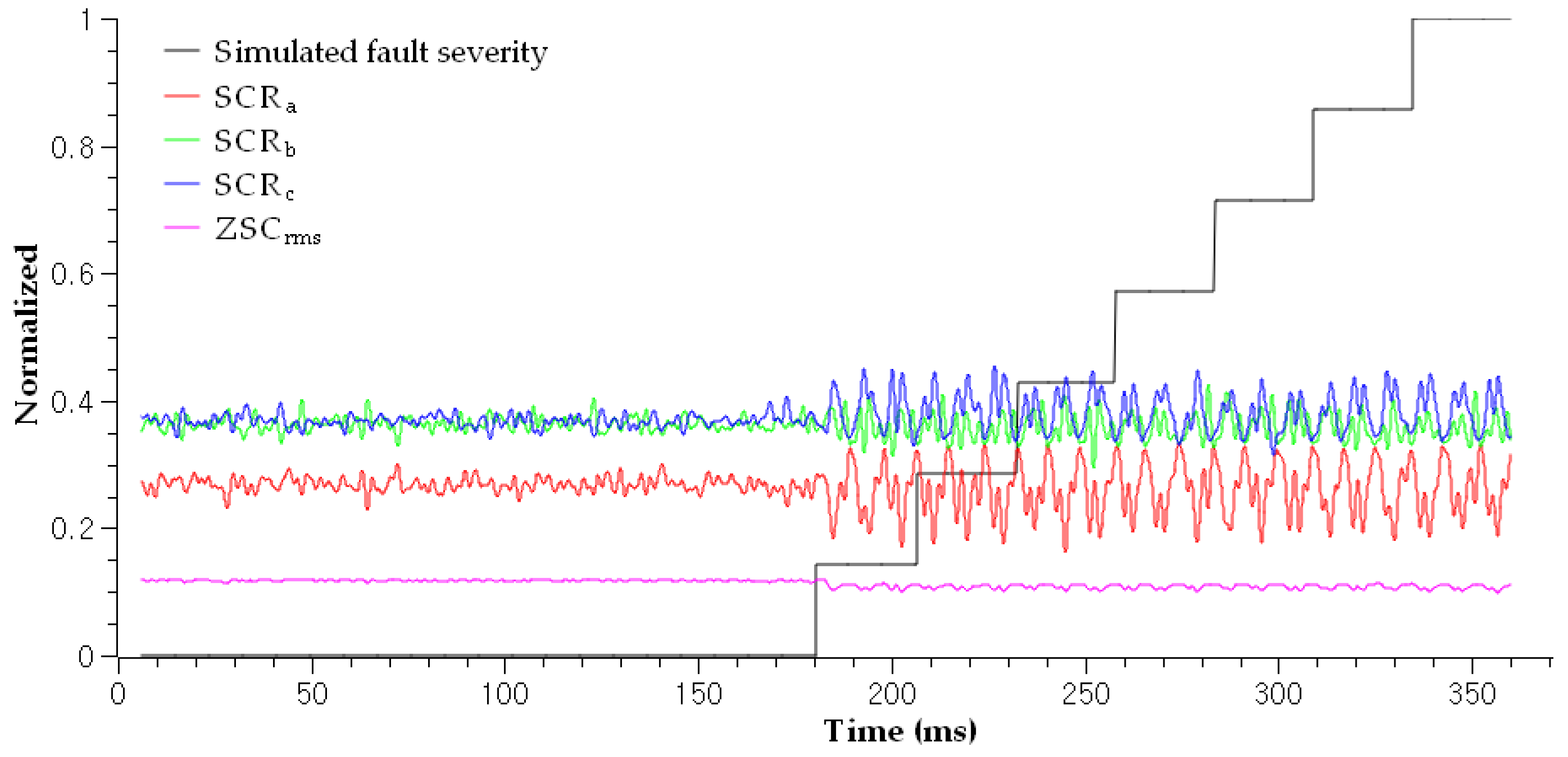
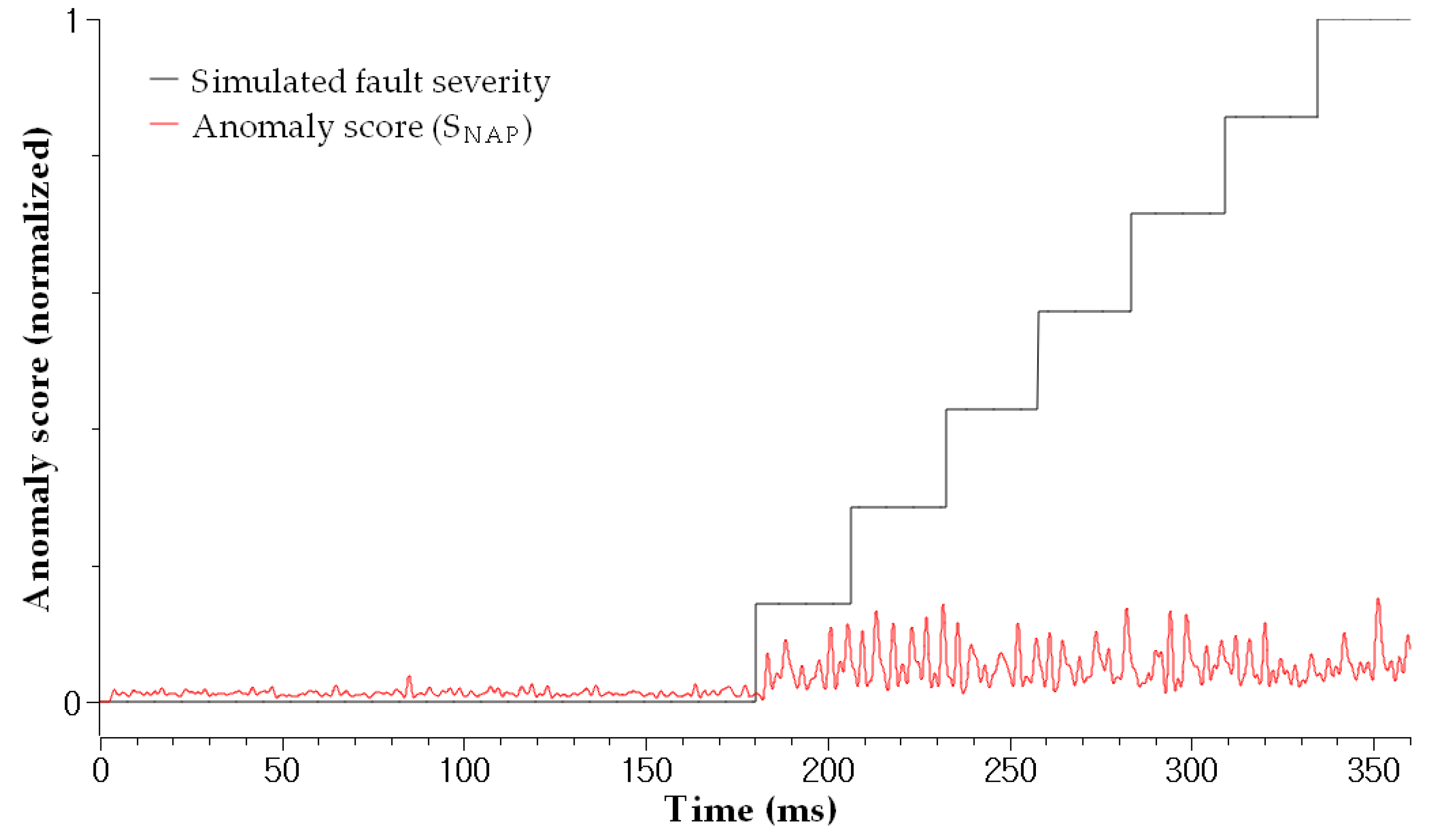
4.3. Result and Analysis
4.4. Comparison with Other Studies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, S.J.; Park, J.B. Multiple chirp reflectometry for determination of fault direction and localization in live branched network cables. IEEE Trans. Instrum. Meas. 2017, 66, 2606–2614. [Google Scholar] [CrossRef]
- Gu, F.-C.; Chang, H.-C.; Chen, F.-H.; Kuo, C.-C. Partial discharge pattern recognition of power cable joints using extension method with fractal feature enhancement. Expert Syst. Appl. 2012, 39, 2804–2812. [Google Scholar] [CrossRef]
- Lee, C.K.; Chang, S.J. A Method of Fault Localization Within the Blind Spot Using the Hybridization Between TDR and Wavelet Transform. IEEE Sens. J. 2021, 21, 5102–5110. [Google Scholar] [CrossRef]
- Jacob, R.A.; Senemmar, S.; Zhang, J. Fault Diagnostics in Shipboard Power Systems using Graph Neural Networks. In Proceedings of the 2021 IEEE 13th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Dallas, TX, USA, 22–25 August 2021; Volume 1, pp. 316–321. [Google Scholar]
- Ip, K.H.; Tang, C.P. Electrical Behavior of Flexible Cables With Intermittent Faults. In Electrical Contacts—2006, Proceedings of the 52nd IEEE Holm Conference on Electrical Contacts, Montreal, QC, Canada, 25–27 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 63–68. [Google Scholar]
- Cozza, A. Never trust a cable bearing echoes: Understanding ambiguities in time-domain reflectometry applied to soft faults in cables. IEEE Trans. Electromagn. Compat. 2018, 61, 586–589. [Google Scholar] [CrossRef]
- Lee, C.-K.; Chang, S.J. Fault detection in multi-core C&I cable via machine learning based time-frequency domain reflectometry. Appl. Sci. 2019, 10, 158. [Google Scholar]
- Bang, S.S.; Shin, Y.-J. Classification of faults in multicore cable via time–frequency domain reflectometry. IEEE Trans. Ind. Electron. 2019, 67, 4163–4171. [Google Scholar] [CrossRef]
- Kim, H.; Jeong, H.; Lee, H.; Kim, S.W. Online and Offline Diagnosis of Motor Power Cables Based on 1D CNN and Periodic Burst Signal Injection. Sensors 2021, 21, 5936. [Google Scholar] [CrossRef]
- Jarrahi, M.A.; Samet, H.; Ghanbari, T. Fast current-only based fault detection method in transmission line. IEEE Syst. J. 2018, 13, 1725–1736. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H.; Kim, S.W. Current Only-Based Fault Diagnosis Method for Industrial Robot Control Cables. Sensors 2022, 22, 1917. [Google Scholar] [CrossRef]
- Chalapathy, R.; Menon, A.K.; Chawla, S. Anomaly detection using one-class neural networks. arXiv 2019, arXiv:1802.06360. [Google Scholar]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly Detection: A Survey. ACM Comput. Surv. (CSUR) 2009, 41, 1–58. [Google Scholar] [CrossRef]
- Bulusu, S.; Kailkhura, B.; Li, B.; Varshney, P.K.; Song, D. Anomalous Example Detection in Deep Learning: A Survey. IEEE Access 2020, 8, 132330–132347. [Google Scholar] [CrossRef]
- Chen, J.; Sathe, S.; Aggarwal, C.; Turaga, D. Outlier detection with autoencoder ensembles. In Proceedings of the 2017 SIAM International Conference on Data Mining, Houston, TX, USA, 27–29 April 2017; pp. 90–98. [Google Scholar]
- Liao, W.; Guo, Y.; Chen, X.; Li, P. A unified unsupervised gaussian mixture variational autoencoder for high dimensional outlier detection. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 1208–1217. [Google Scholar]
- Zhou, C.; Paffenroth, R.C. Anomaly detection with robust deep autoencoders. In Proceedings of the 23rd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Halifax, NS, Canada, 13–17 August 2017; pp. 665–674. [Google Scholar]
- Zong, B.; Song, Q.; Min, M.R.; Cheng, W.; Lumezanu, C.; Cho, D.; Chen, H. Deep autoencoding gaussian mixture model for unsupervised anomaly detection. In Proceedings of the International Conference on Learning Representations, Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Cho, K.; Van Merriënboer, B.; Bahdanau, D.; Bengio, Y. On the properties of neural machine translation: Encoder-decoder approaches. arXiv 2014, arXiv:1409.1259. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural machine translation by jointly learning to align and translate. arXiv 2014, arXiv:1409.0473. [Google Scholar]
- Montoya-Mira, R.; Diez, J.M.; Blasco, P.A.; Montoya, R. Equivalent circuit and calculation of unbalanced power in three-wire three-phase linear networks. IET Gener. Transm. Distrib. 2018, 12, 1466–1473. [Google Scholar] [CrossRef]
- Rahman, M.A.A.; Ghosh, P.S. Diagnosis on MV XLPE power cable by using frequency variance leakage current analysis. In Proceedings of the 2008 International Conference on Condition Monitoring and Diagnosis, Beijing, China, 21–24 April 2008; pp. 1154–1157. [Google Scholar]
- Kim, K.H.; Shim, S.; Lim, Y.; Jeon, J.; Choi, J.; Kim, B.; Yoon, A.S. Rapp: Novelty detection with reconstruction along projection pathway. In Proceedings of the International Conference on Learning Representations, New Orleans, LA, USA, 6–9 May 2019. [Google Scholar]
- Shin, S.Y.; Kim, H.-j. Extended Autoencoder for Novelty Detection with Reconstruction along Projection Pathway. Appl. Sci. 2020, 10, 4497. [Google Scholar] [CrossRef]
- Graves, A.; Schmidhuber, J. Framewise phoneme classification with bidirectional LSTM and other neural network architectures. SAE Int. J. Passeng. Cars-Electron. Electr. Syst. 2005, 18, 602–610. [Google Scholar] [CrossRef]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M. Tensorflow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Ohki, Y.; Hirai, N. Detection of abnormality occurring over the whole cable length by frequency domain reflectometry. IEEE Trans. Dielectr. Electr. Insul. 2018, 25, 2467–2469. [Google Scholar] [CrossRef]
- Shi, Q.; Kanoun, O. A new algorithm for wire fault location using time-domain reflectometry. IEEE Sens. J. 2013, 14, 1171–1178. [Google Scholar] [CrossRef]
- Shi, X.; Liu, Y.; Xu, X.; Jing, T. Online Detection of Aircraft ARINC Bus Cable Fault Based on SSTDR. IEEE Syst. J. 2021, 15, 2482–2491. [Google Scholar] [CrossRef]
- Lee, H.M.; Lee, G.S.; Kwon, G.-Y.; Bang, S.S.; Shin, Y.-J. Industrial Applications of Cable Diagnostics and Monitoring Cables via Time–Frequency Domain Reflectometry. IEEE Sens. J. 2021, 21, 1082–1091. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subjects | Unit | Specification |
|---|---|---|
| Total number of wires in cable | - | 32 |
| Cross-sectional area of a conductor | mm | 1.5 |
| Number of strands of a conductor | - | 30 |
| Cross-sectional are of a strand | mm | 0.25 |
| Maximum resistance of a wire | /km | 17.7 |
| Material of insulation layer | - | PVC |
| Thickness of insulation layer | - | 0.36 |
| Shield type | - | Braided |
| Outer diameter | mm | 20.4 |
| Scenarios | Damage Cases | FI | in % | Number of Dataset |
|---|---|---|---|---|
| 0 (Normal) | 0 cut | 0.000 | 100.0 | 85,000 |
| 1 | 4 cut | 0.134 | 86.6 | 85,000 |
| 2 | 8 cut | 0.267 | 73.3 | 85,000 |
| 3 | 12 cut | 0.400 | 60.0 | 85,000 |
| 4 | 16 cut | 0.534 | 46.6 | 85,000 |
| 5 | 20 cut | 0.667 | 33.3 | 85,000 |
| 6 | 24 cut | 0.800 | 20.0 | 85,000 |
| 7 | 28 cut | 0.934 | 6.6 | 85,000 |
| Scenarios | Damage Cases | FI | MSE |
|---|---|---|---|
| 0 (Normal) | 0 cut | 0.000 | 72.31 × |
| 1 | 4 cut | 0.134 | 65.66 × |
| 2 | 8 cut | 0.267 | 42.29 × |
| 3 | 12 cut | 0.400 | 19.29 × |
| 4 | 16 cut | 0.534 | 7.17 × |
| 5 | 20 cut | 0.667 | 1.80 × |
| 6 | 24 cut | 0.800 | 0.98 × |
| 7 | 28 cut | 0.934 | 8.85 × |
| Utilizing Current Signal [Proposed Method] [10,11] | Utilizing Injected Reference Signal [9,28,29,30,31] | |||||||
|---|---|---|---|---|---|---|---|---|
| Estimation of soft fault severity | O | X | X | X | X | X | X | O |
| Online diagnosis under varying conditions | O | X | O | O | X | X | O | X |
| Require reference signal design | X | X | X | O | O | O | O | O |
| Require domain knowledge and cable parameters | X | X | X | X | O | O | O | O |
| Require waveform generator | X | X | X | O | O | O | O | O |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Lee, H.; Kim, S.; Kim, S.W. Attention Recurrent Neural Network-Based Severity Estimation Method for Early-Stage Fault Diagnosis in Robot Harness Cable. Sensors 2023, 23, 5299. https://doi.org/10.3390/s23115299
Kim H, Lee H, Kim S, Kim SW. Attention Recurrent Neural Network-Based Severity Estimation Method for Early-Stage Fault Diagnosis in Robot Harness Cable. Sensors. 2023; 23(11):5299. https://doi.org/10.3390/s23115299
Chicago/Turabian StyleKim, Heonkook, Hojin Lee, Seongyun Kim, and Sang Woo Kim. 2023. "Attention Recurrent Neural Network-Based Severity Estimation Method for Early-Stage Fault Diagnosis in Robot Harness Cable" Sensors 23, no. 11: 5299. https://doi.org/10.3390/s23115299
APA StyleKim, H., Lee, H., Kim, S., & Kim, S. W. (2023). Attention Recurrent Neural Network-Based Severity Estimation Method for Early-Stage Fault Diagnosis in Robot Harness Cable. Sensors, 23(11), 5299. https://doi.org/10.3390/s23115299