
Detection of Surface and Subsurface Flaws with Miniature GMR-Based Gradiometer

 , ,
, ,
Abstract
1. Introduction
2. Miniature Eddy-Current Probe with Spin-Valve GMR Sensor
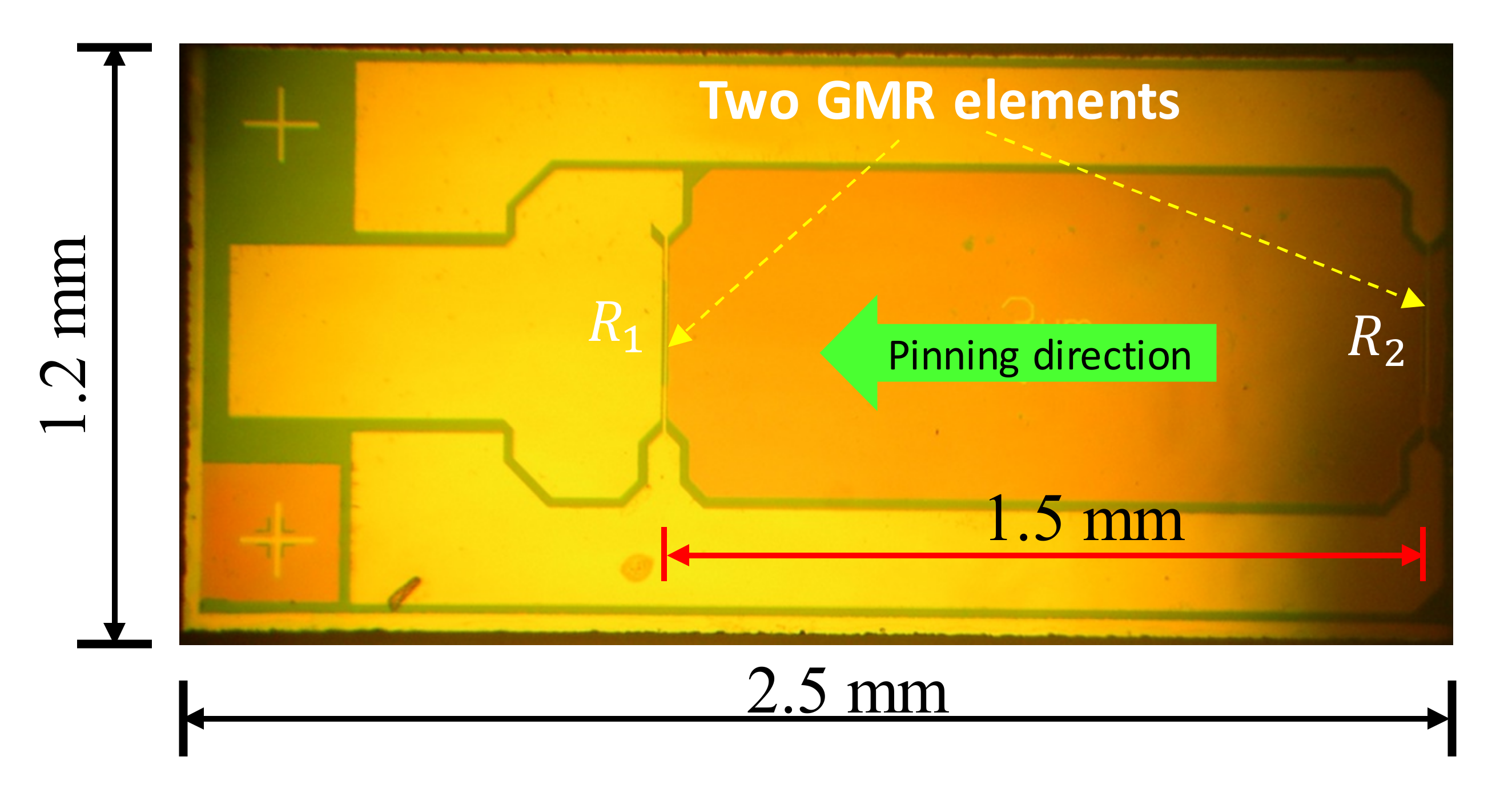
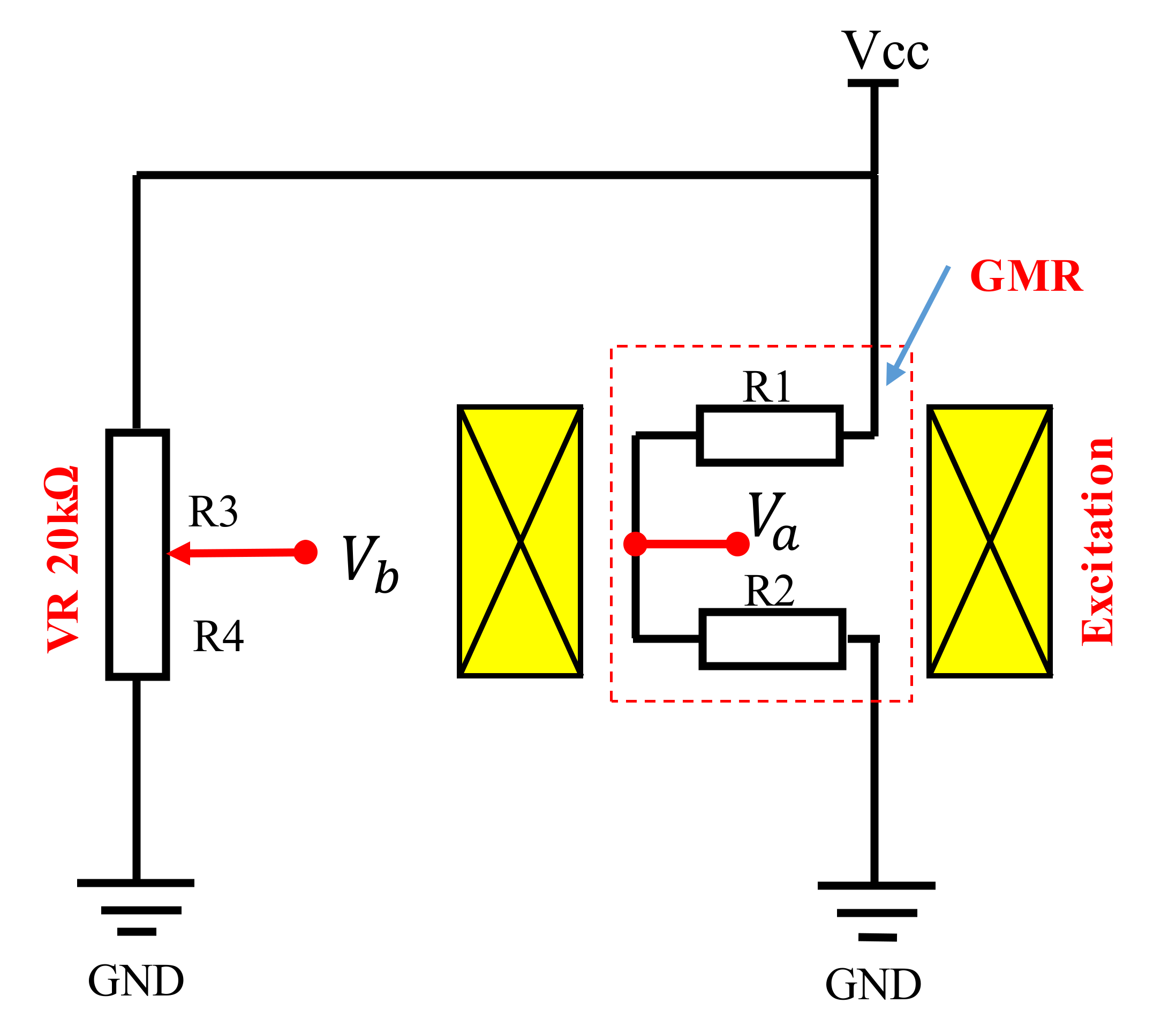
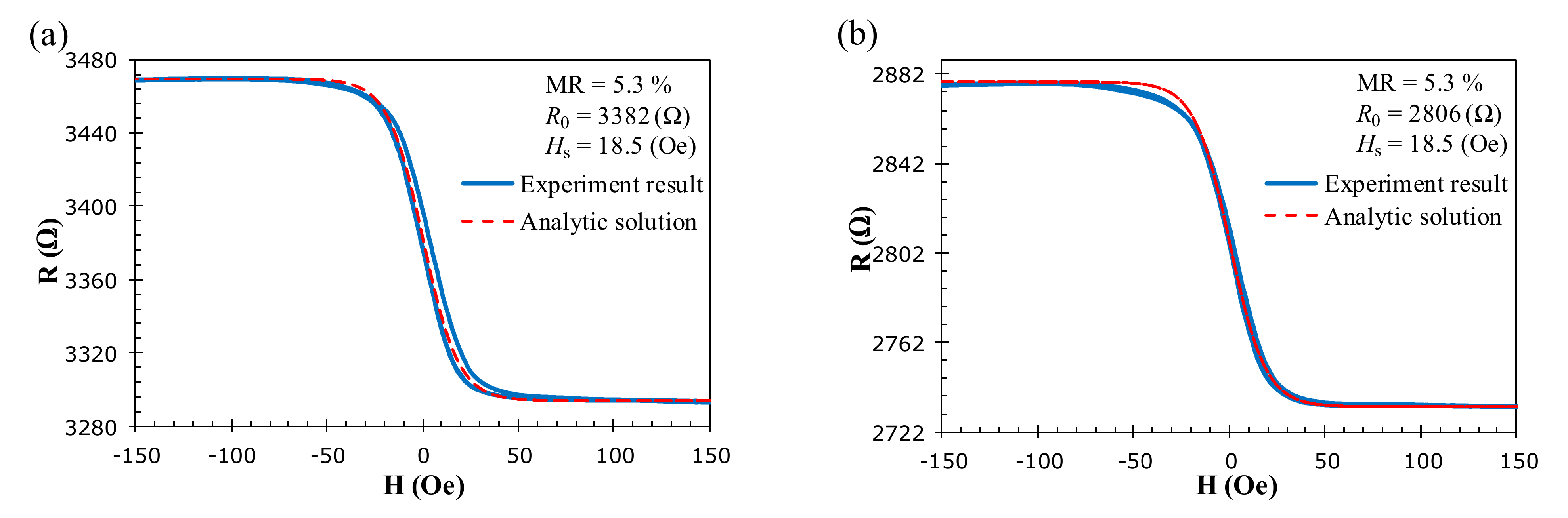
2.1. Fabrication of GMR Chip in a Half-Bridge Configuration
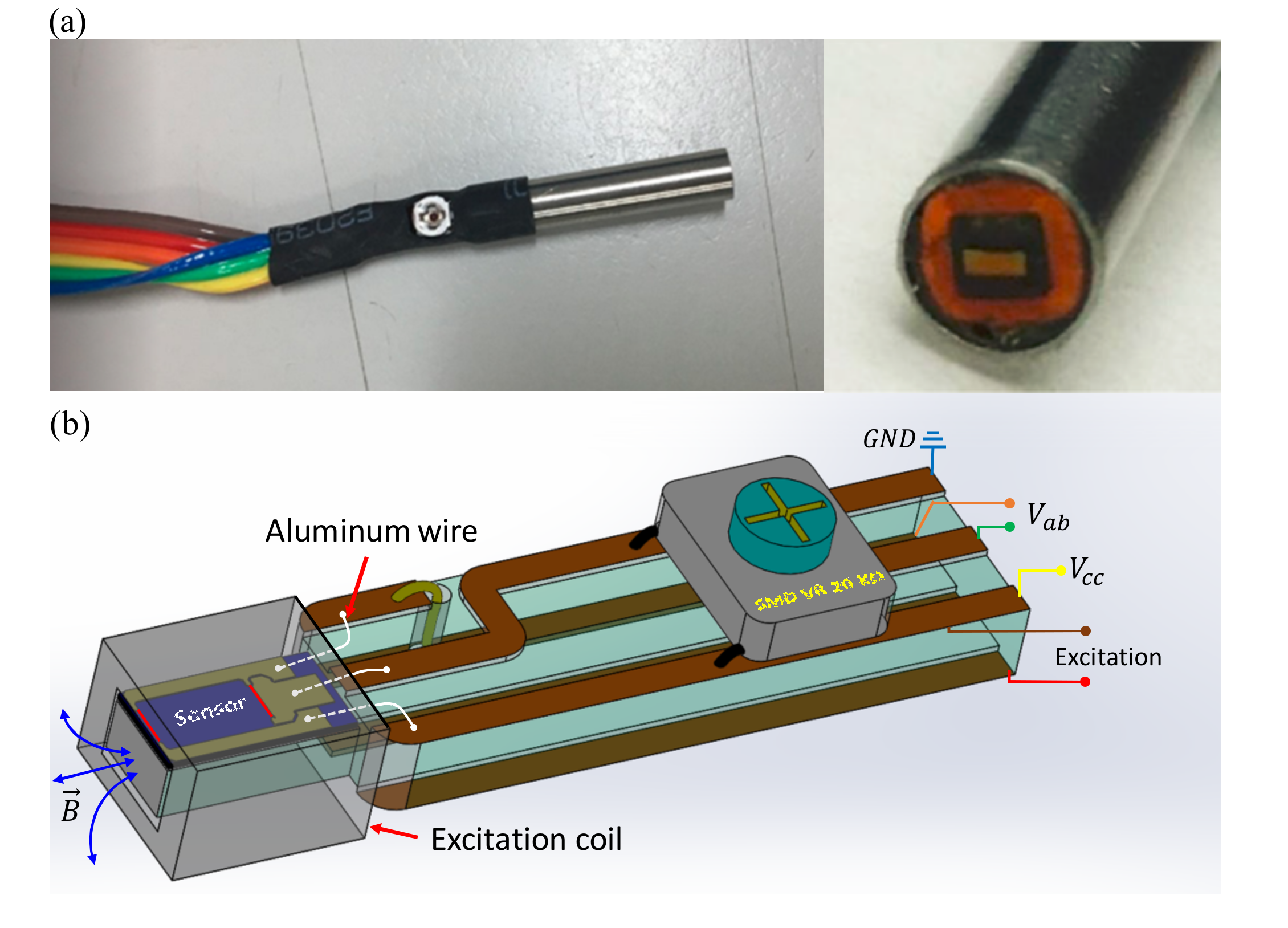
2.2. Development of the EC Probe Based on a Miniature Axial Gradiometer
3. Experiment Setup
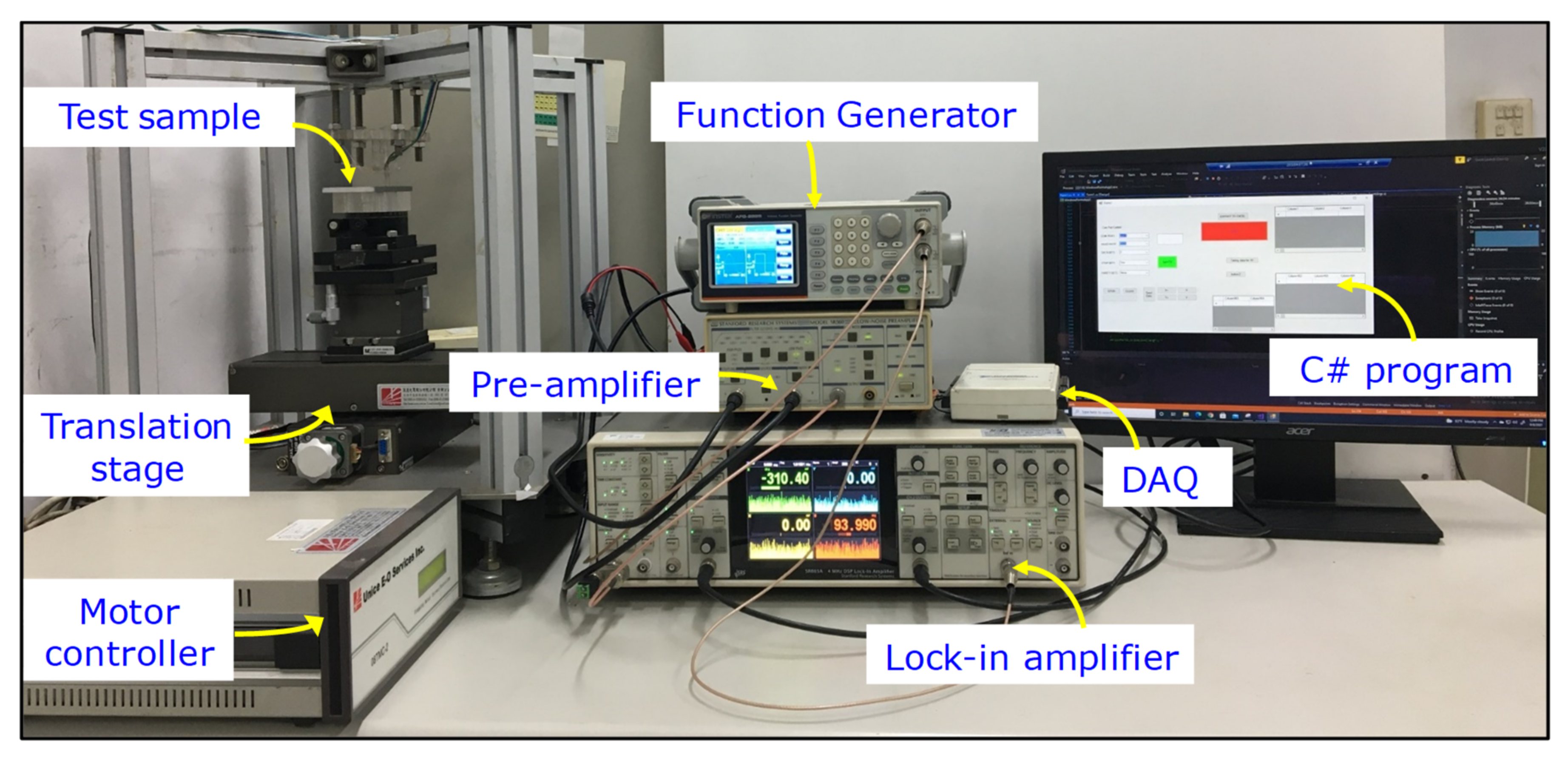
3.1. Experimental Eddy-Current Flaw Detection System
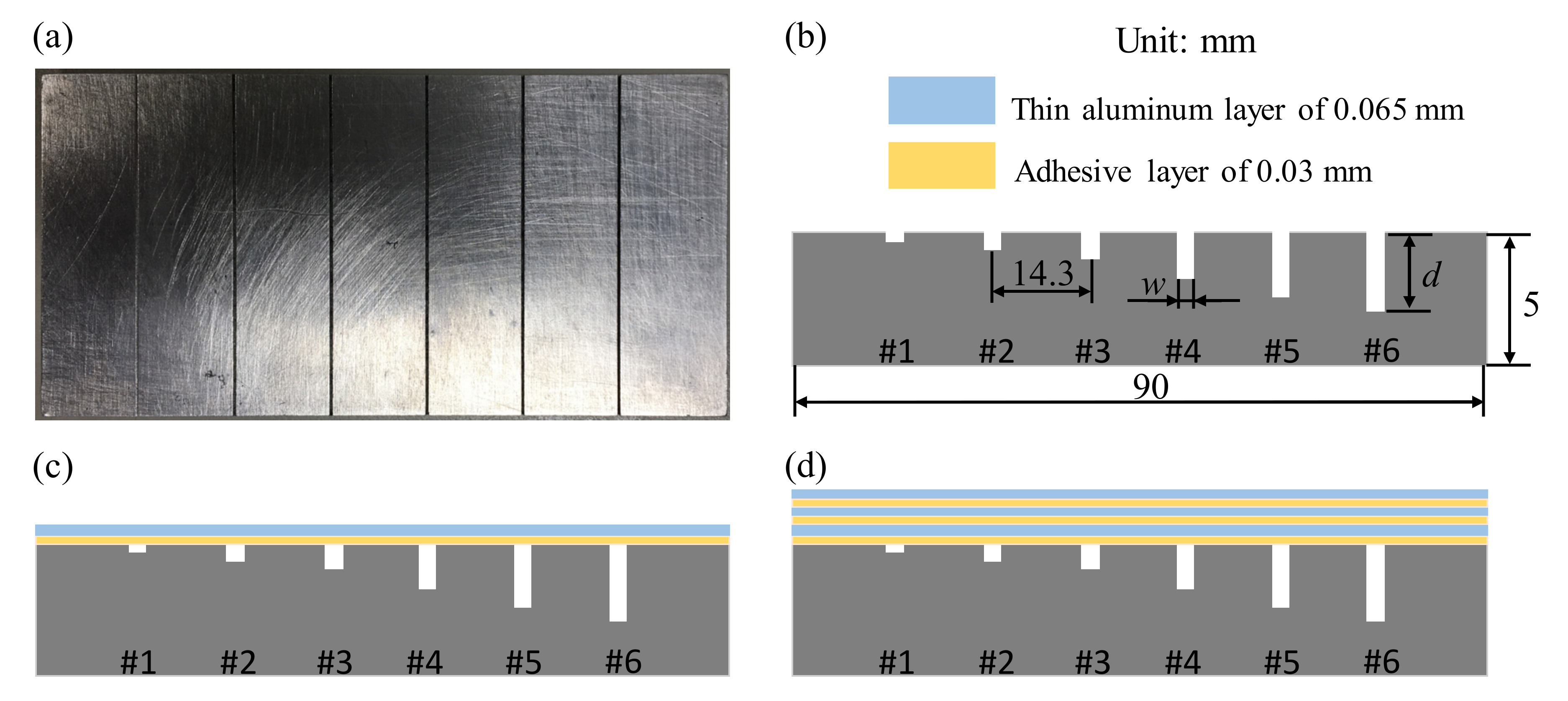
3.2. Kinds of Specimens under Test
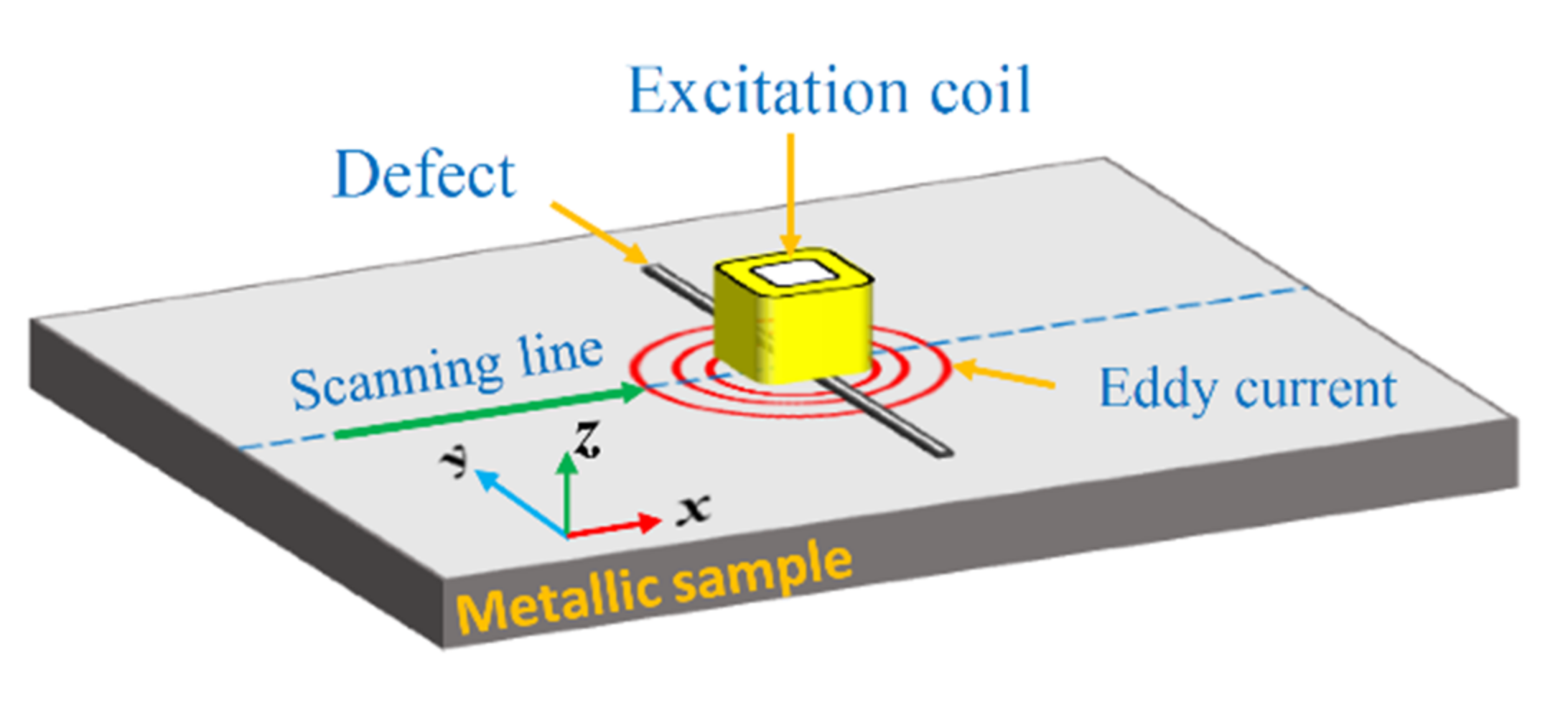
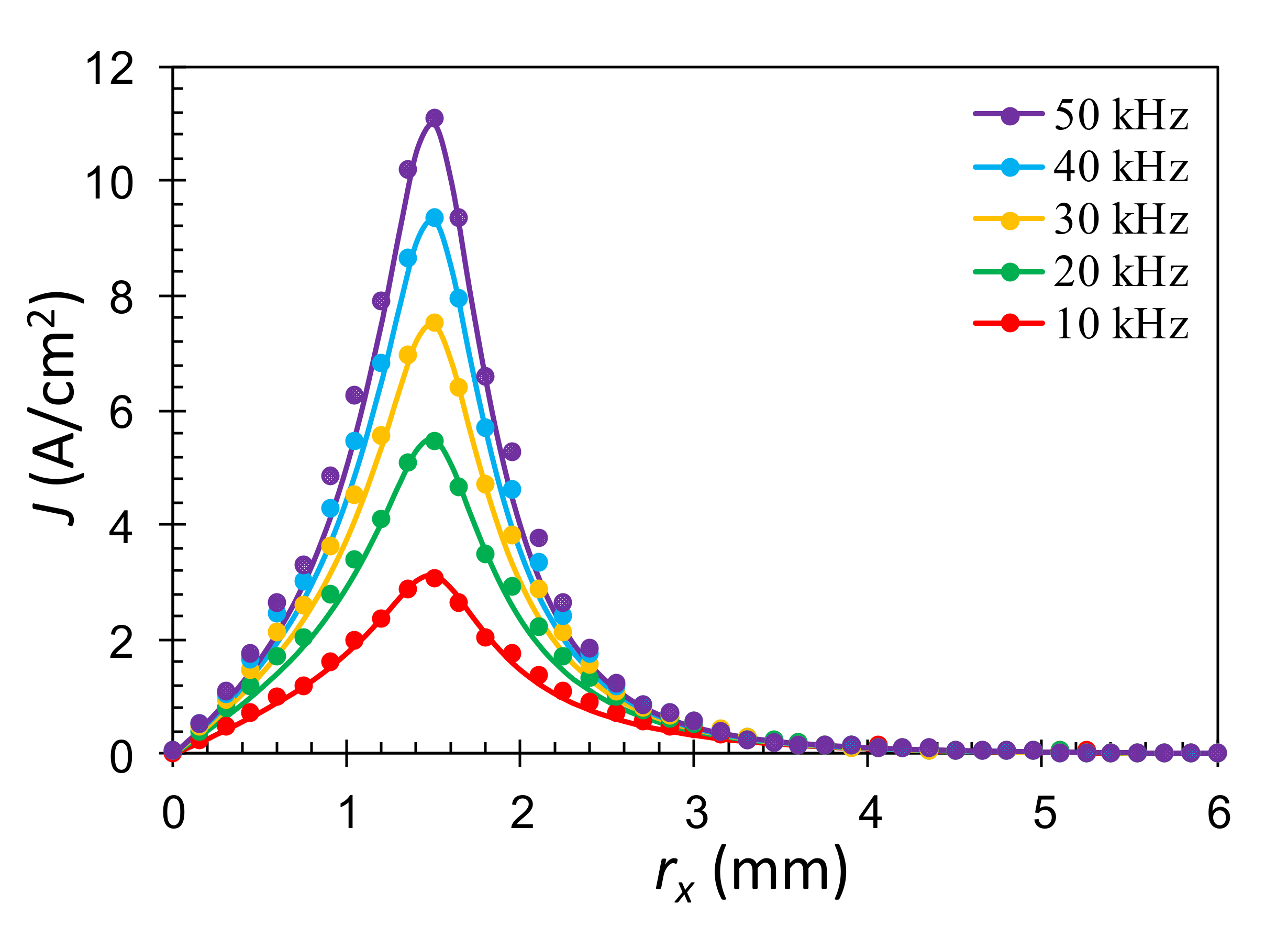
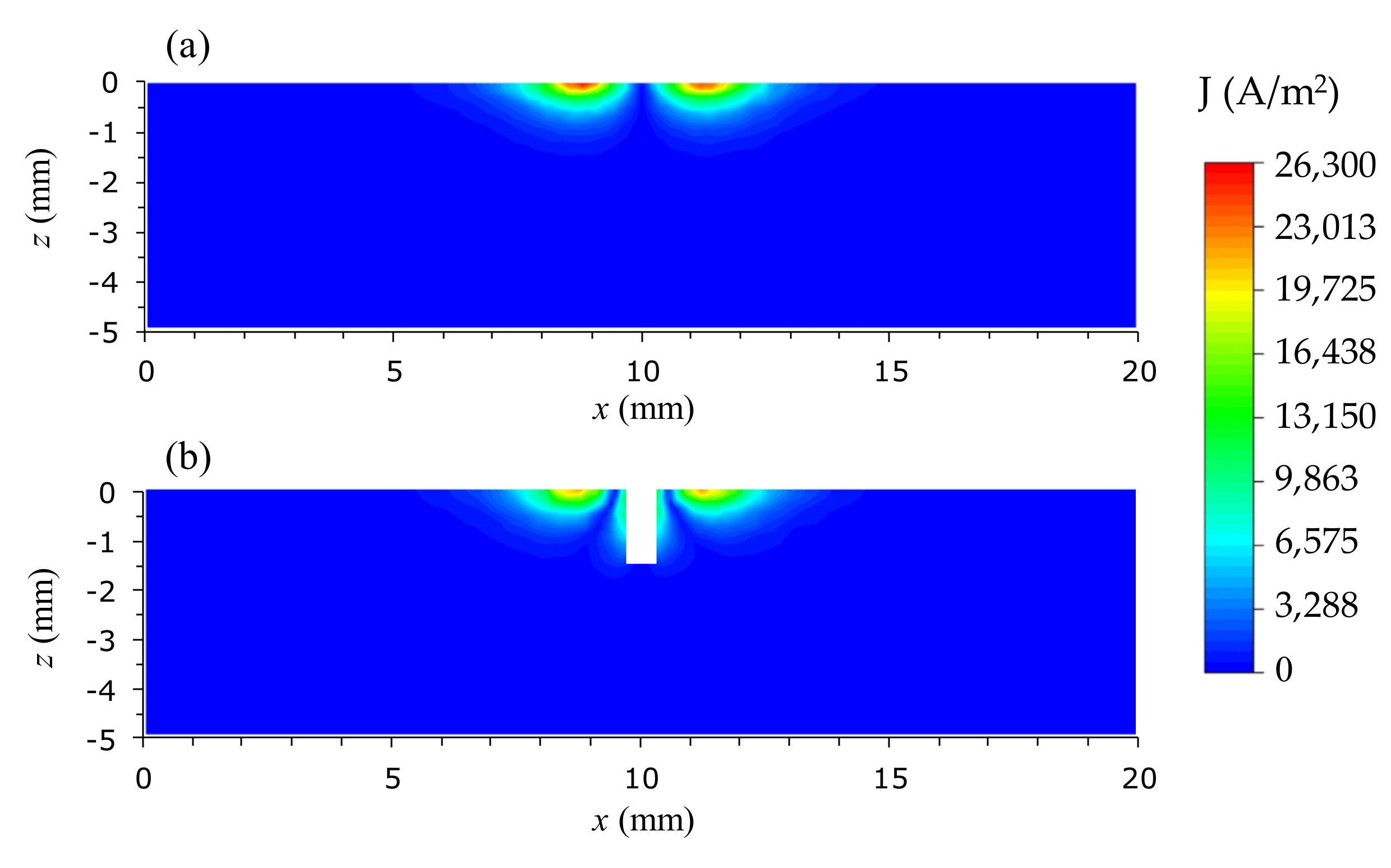
4. Numerical Model and Signal Analysis
5. Experimental Result and Analysis
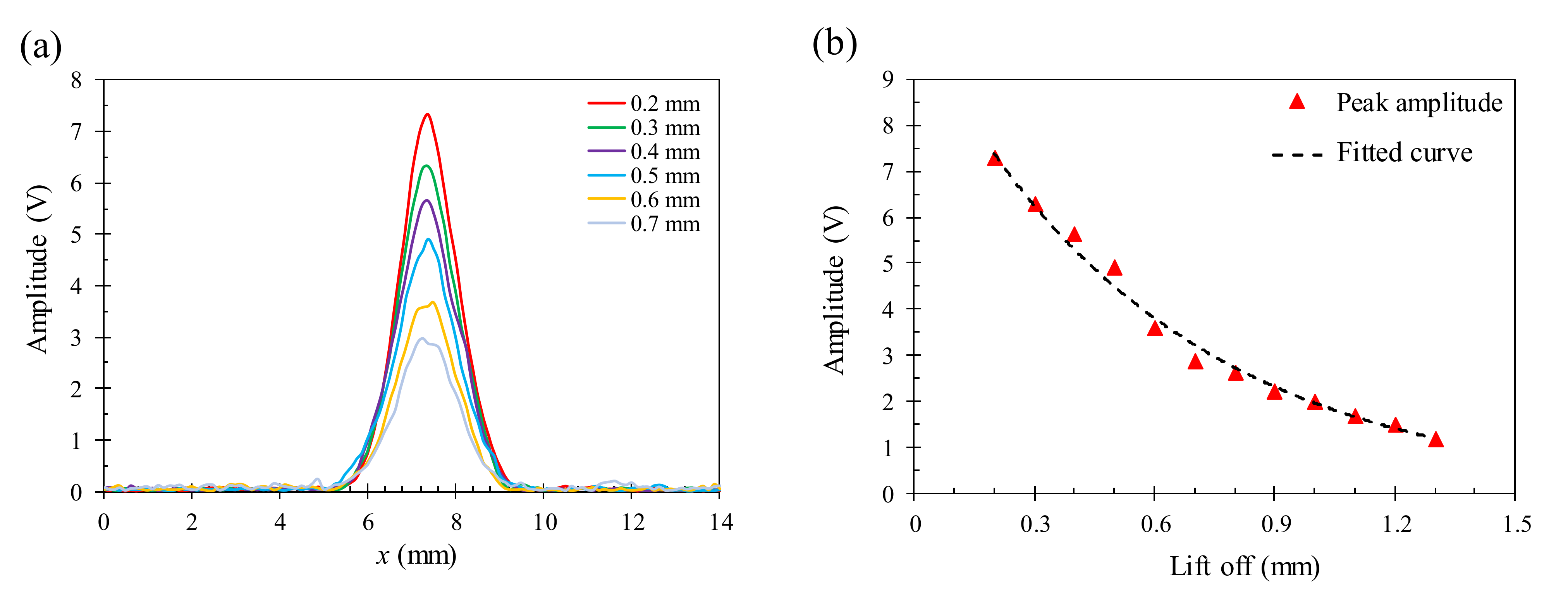
5.1. Lift-Off Effect of the Proposed Probe
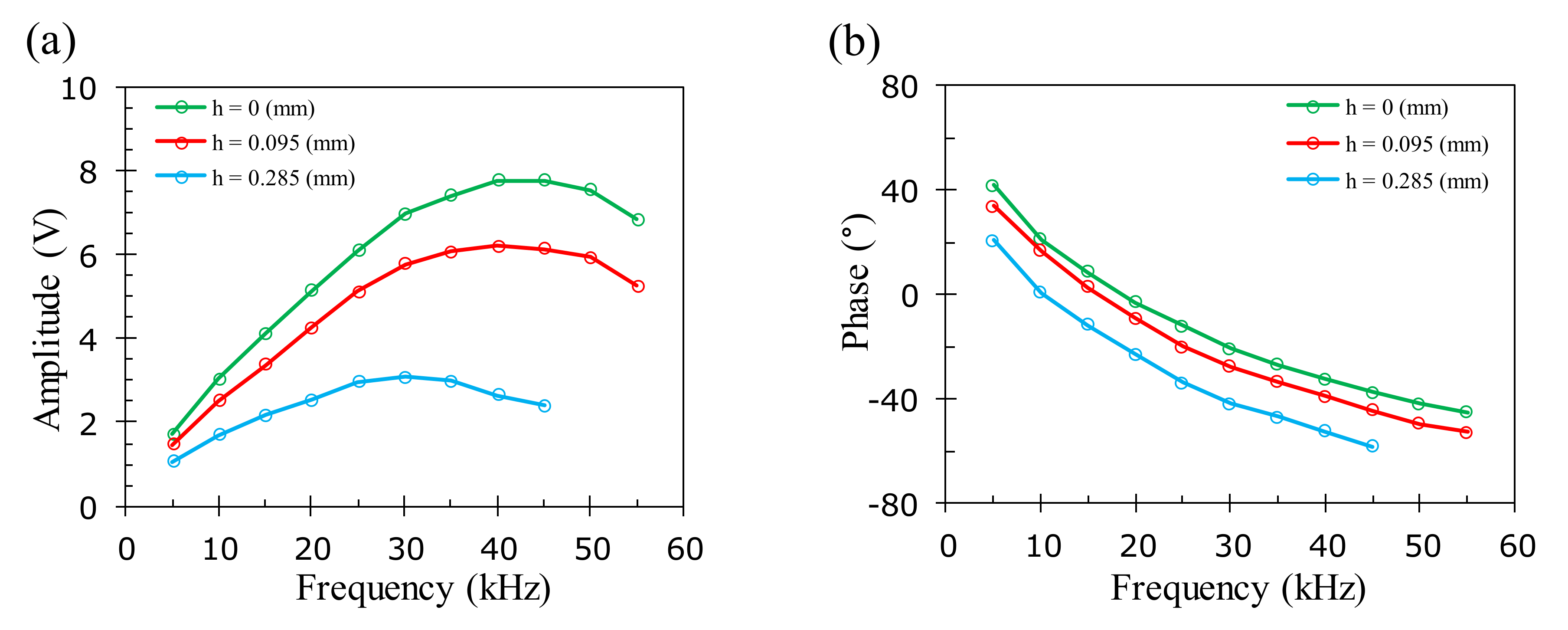
5.2. Frequency Effect for Surface and Subsurface Defect Detection
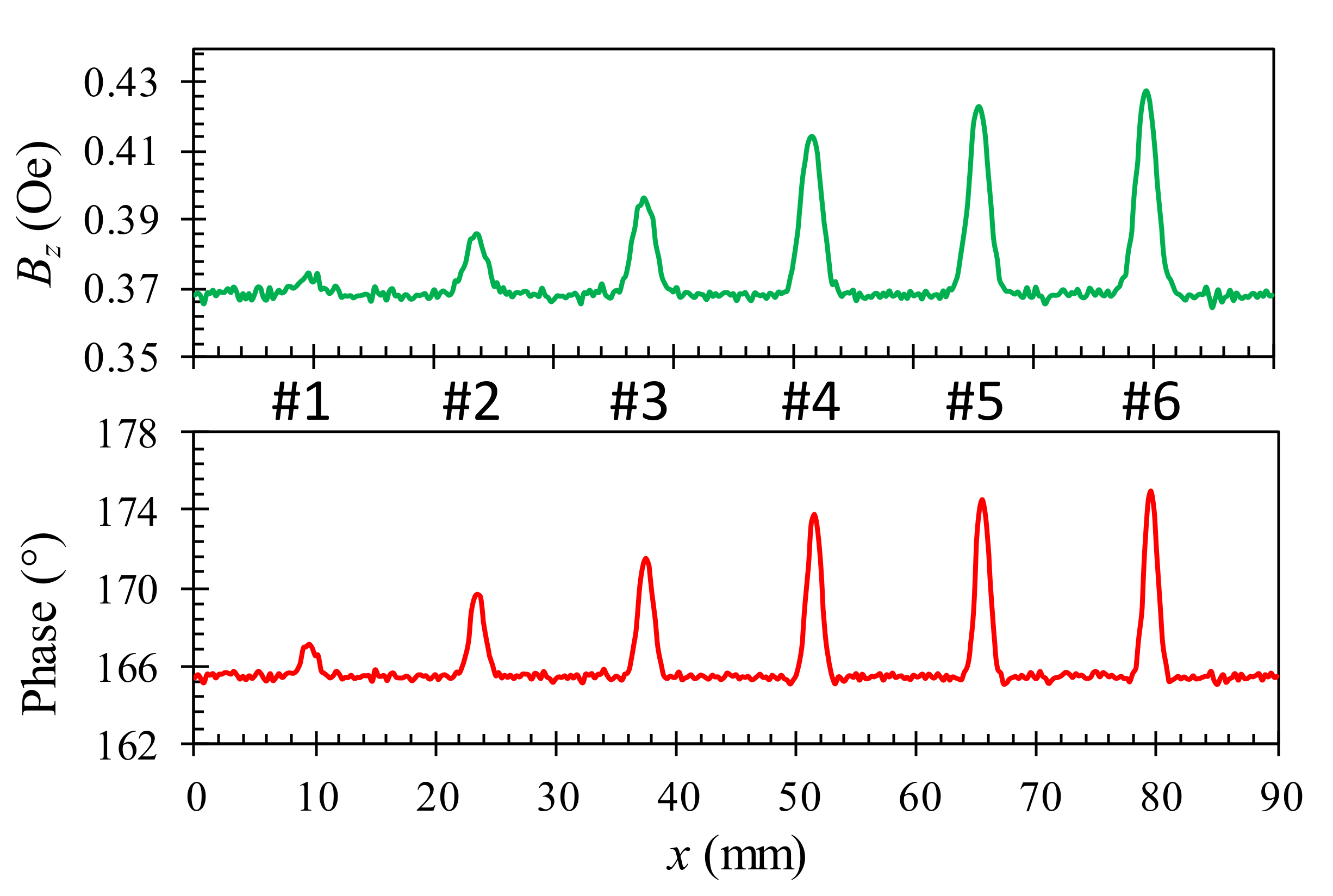
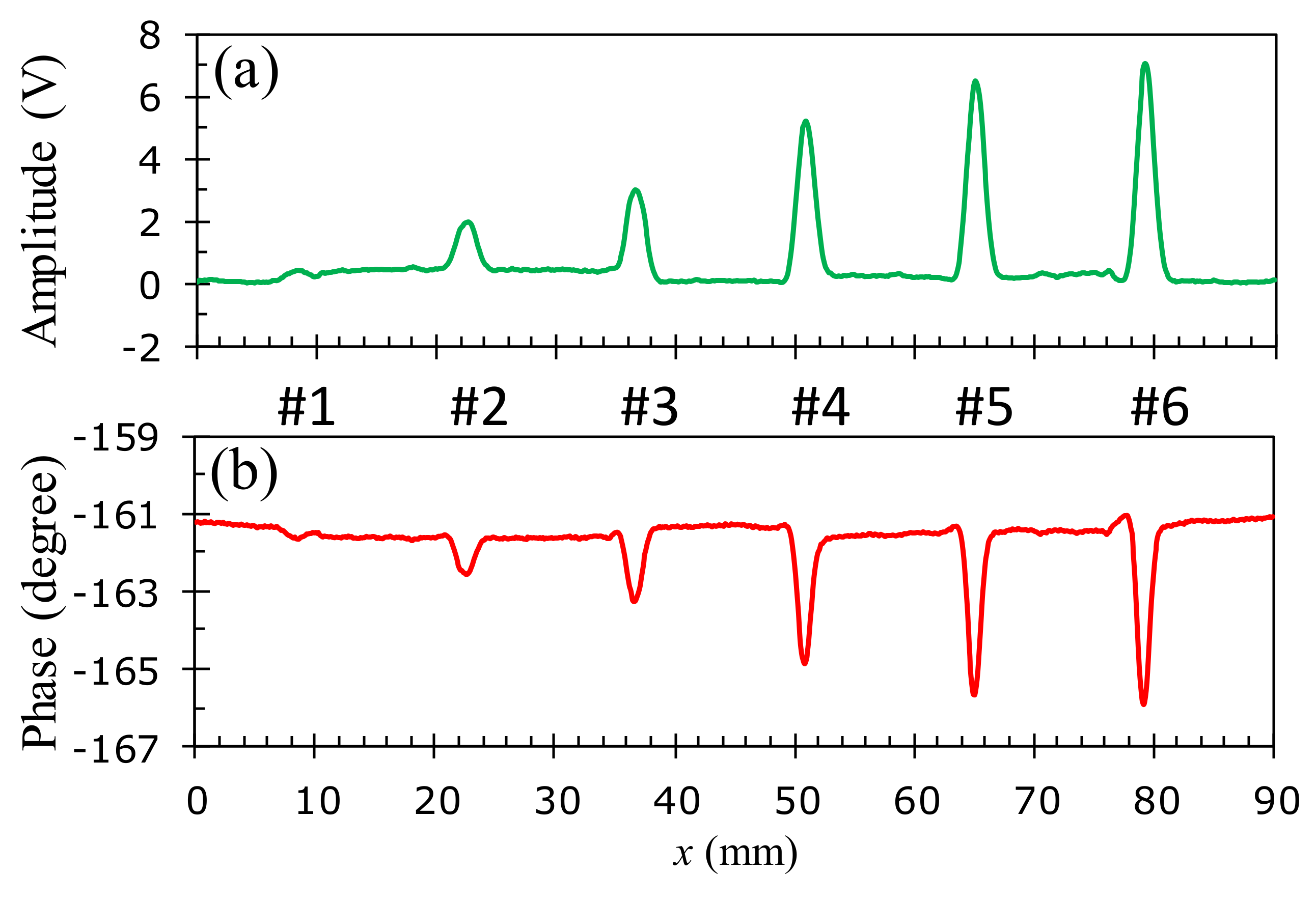
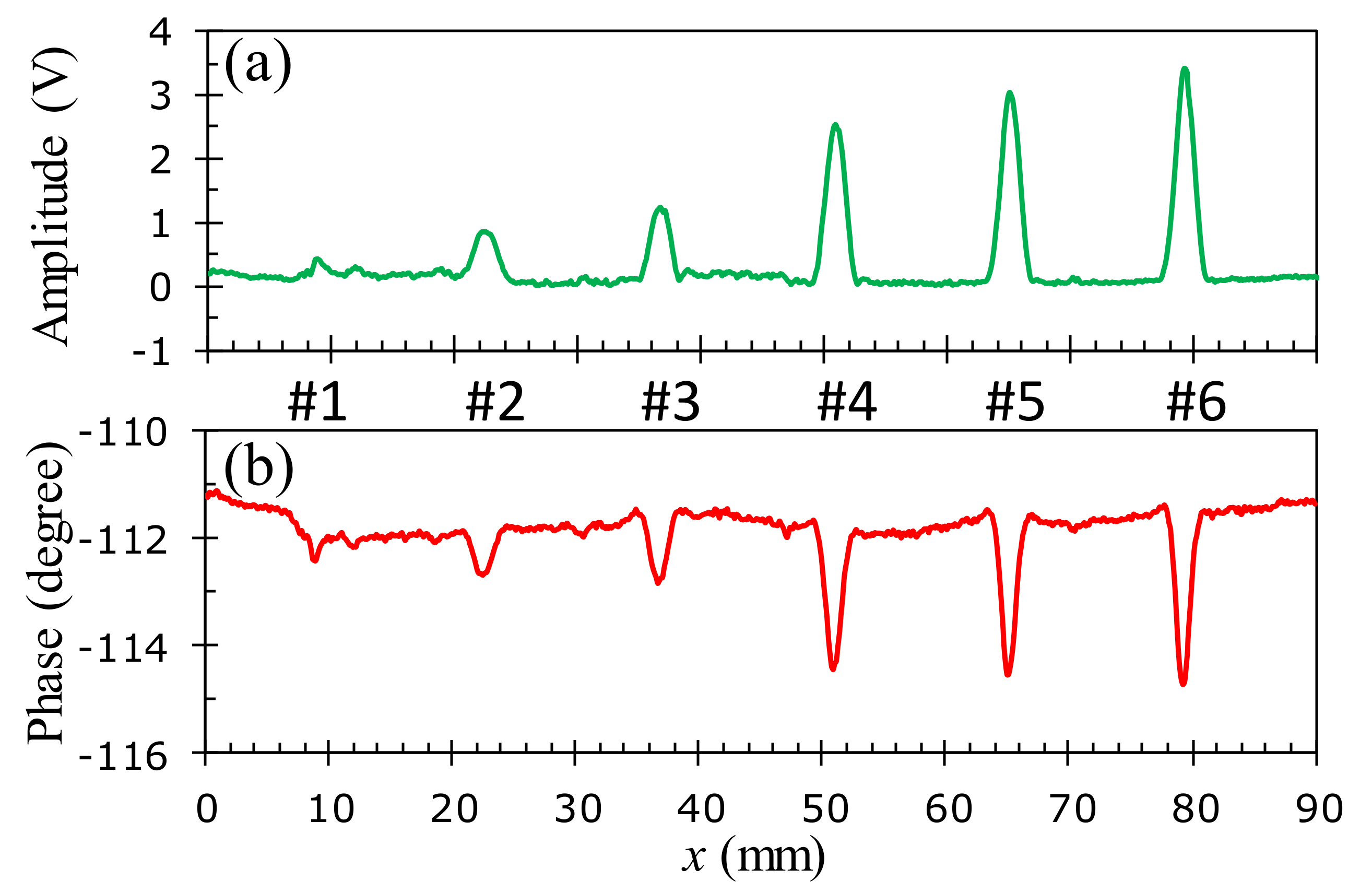
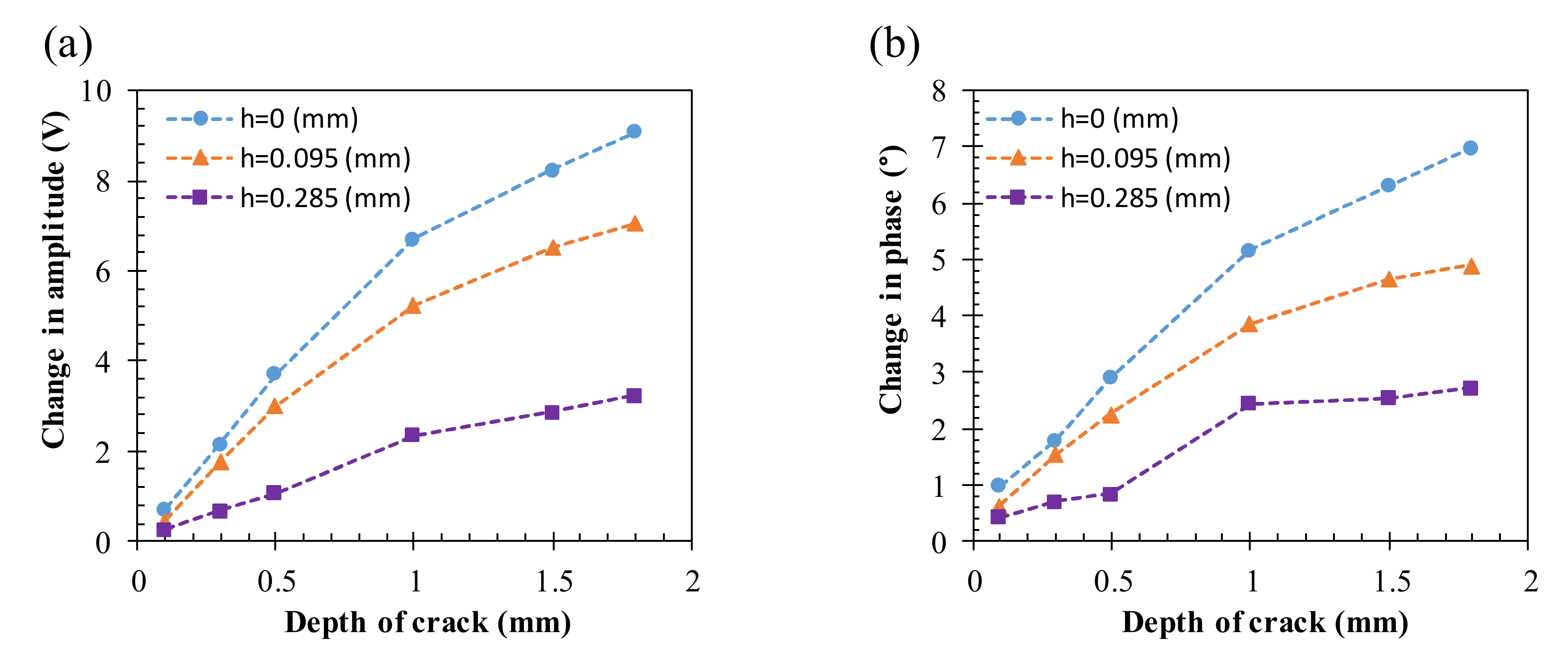
5.3. Detection Limit: Surface and Subsurface Flaws on Aluminum Specimen
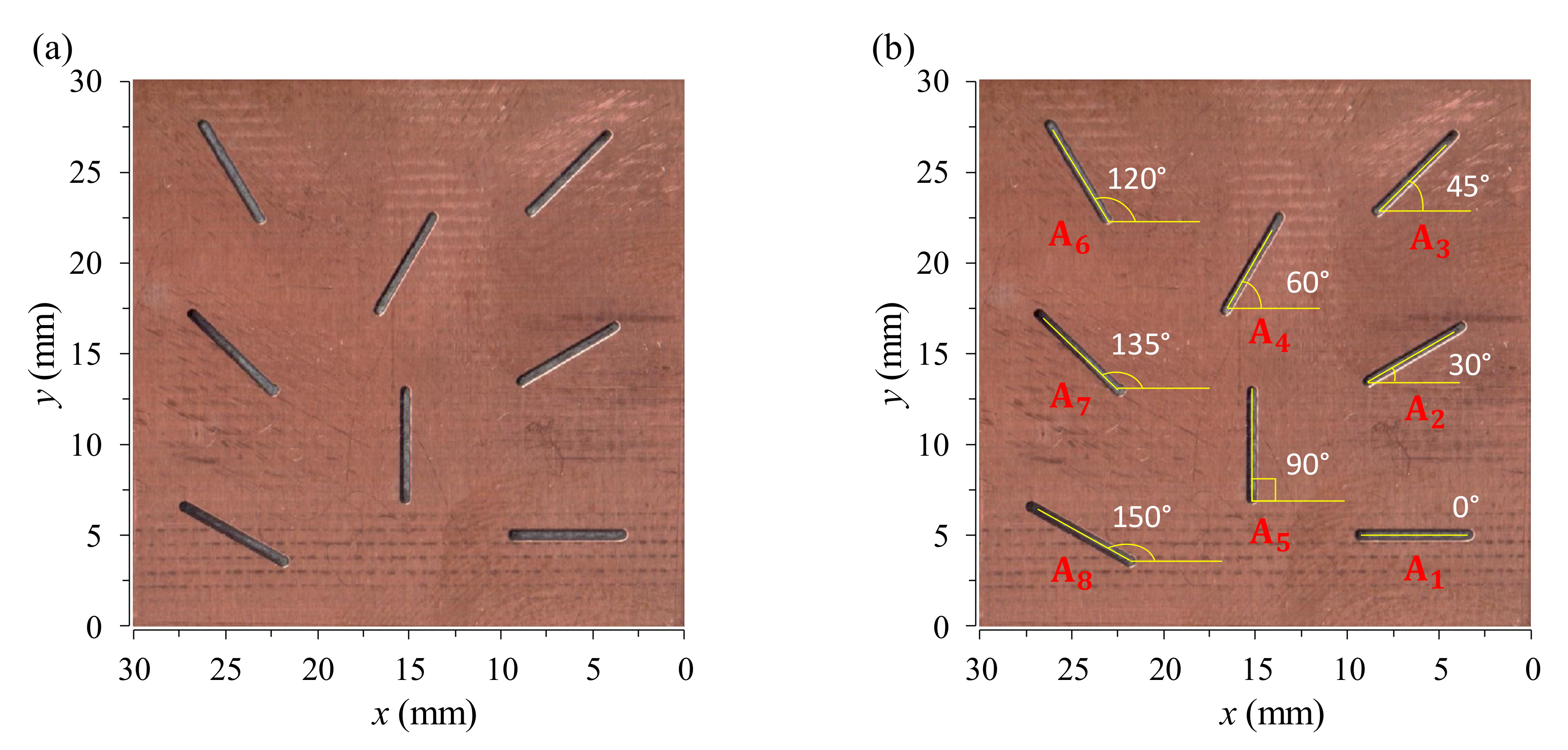
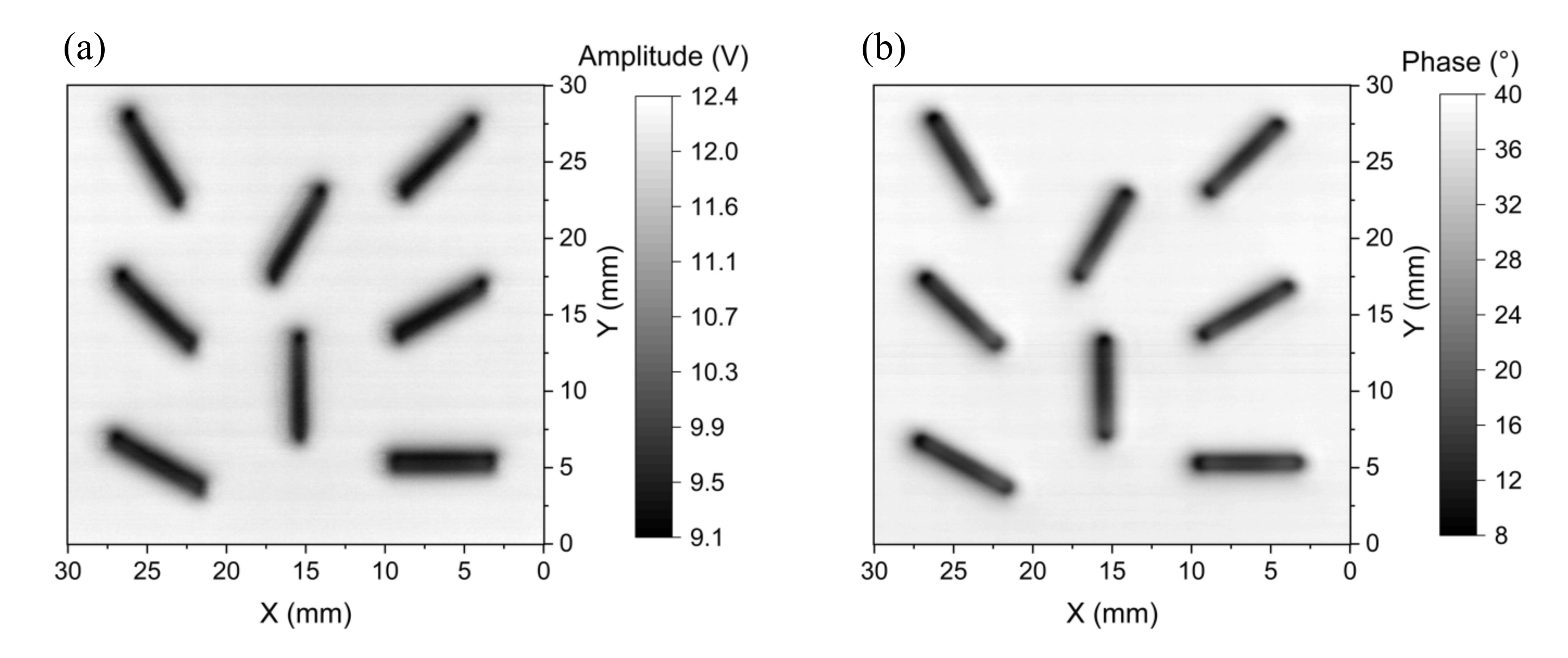
5.4. Determination of Crack Orientation
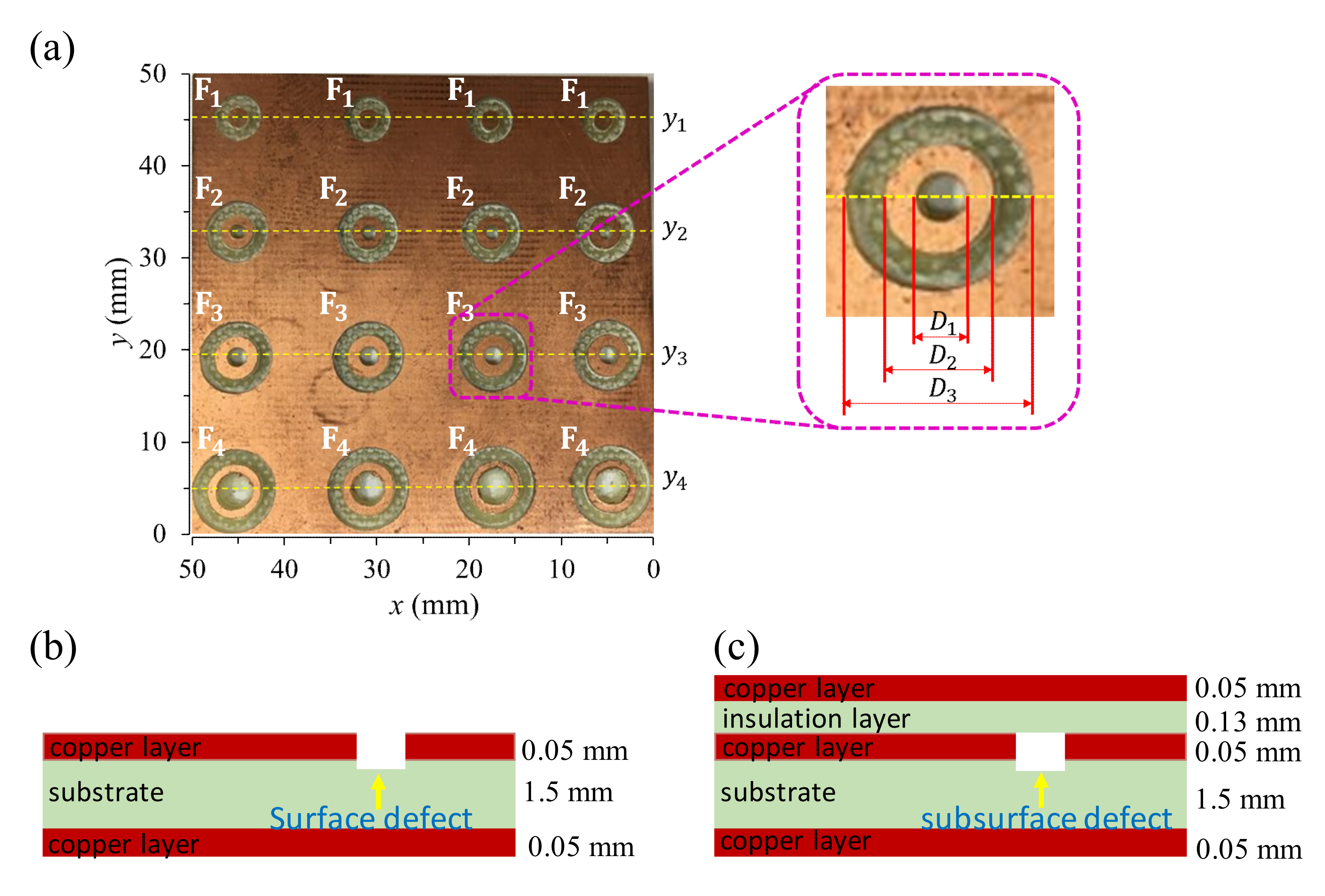
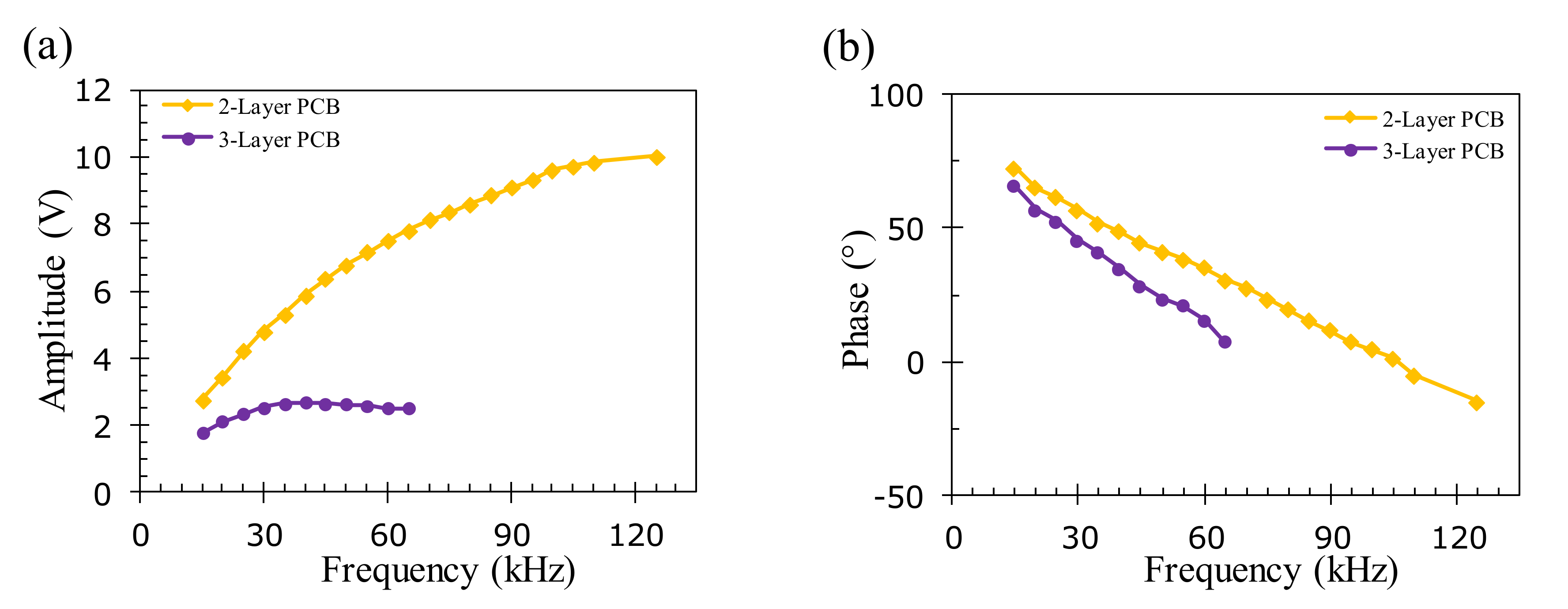
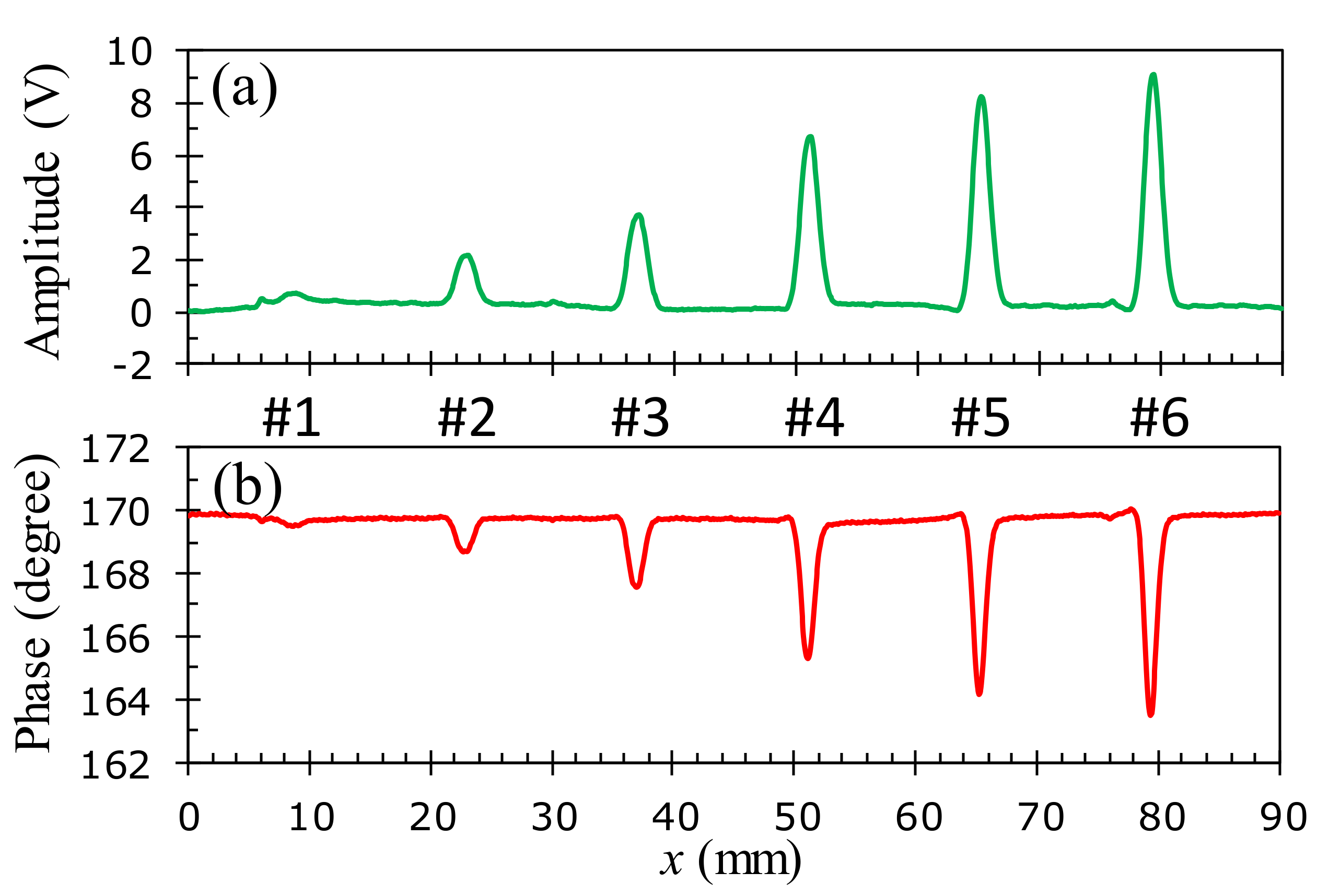
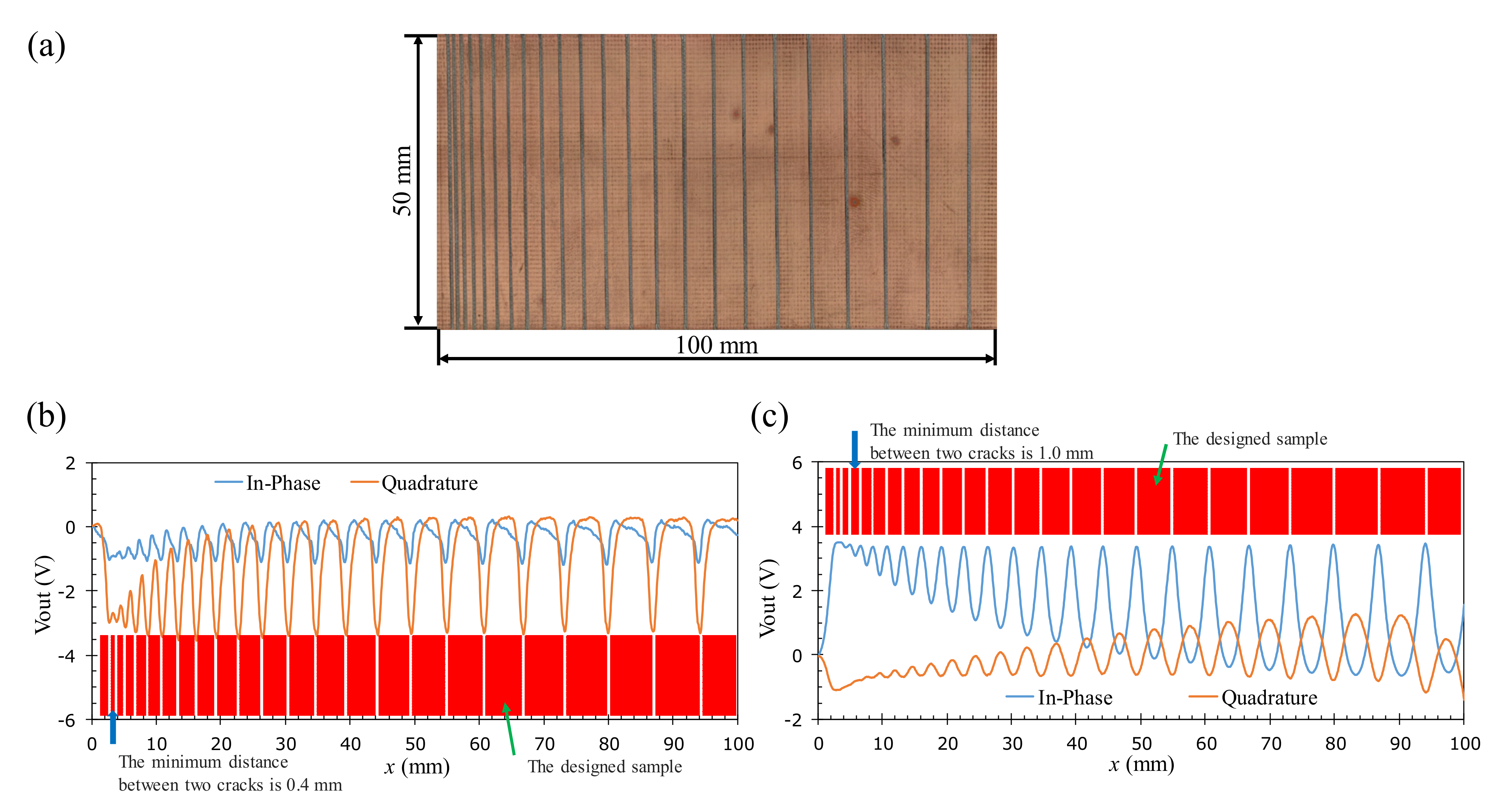
5.5. Spatial Resolution: Flaw Inspection on the Multilayer Printed Circuit Board
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burke, S.K. Eddy-current inversion in the thin-skin limit: Determination of depth and opening for a long crack. J. Appl. Phys. 1994, 76, 3072–3080. [Google Scholar] [CrossRef]
- Burke, S.K.; Ditchburn, R.J. Mutual impedance of planar eddycurrent driver–pickup spiral coils. Res. Nondestruct. Eval. 2008, 19, 1–19. [Google Scholar] [CrossRef]
- Bíró, O. Edge element formulations of eddy current problems. Comput. Methods Appl. Mech. Eng. 1999, 169, 391–405. [Google Scholar] [CrossRef]
- Theodoulidis, T.; Poulakis, N.; Dragogias, A. Rapid computation of eddy current signals from narrow cracks. NDT E Int. 2010, 43, 13–19. [Google Scholar] [CrossRef]
- Lu, M.; Meng, X.; Huang, R.; Peyton, A.; Yin, W. Analysis of Tilt Effect on Notch Depth Profiling Using Thin-Skin Regime of Driver-Pickup Eddy-Current Sensor. Sensors 2021, 21, 5536. [Google Scholar] [CrossRef]
- Fan, M.; Wang, Q.; Cao, B.; Ye, B.; Sunny, A.I.; Tian, G. Frequency Optimization for Enhancement of Surface Defect Classification Using the Eddy Current Technique. Sensors 2016, 16, 649. [Google Scholar] [CrossRef]
- Boltz, E.S.; Tiernan, T.C. New electromagnetic sensors for detection of subsurface cracking and corrosion. Rev. Prog. Quant. Non-Destruct. Eval. 1998, 17, 1033–1038. [Google Scholar]
- Xu, Y.; Yang, Y.; Wu, Y. Eddy Current Testing of Metal Cracks Using Spin Hall Magnetoresistance Sensor and Machine Learning. IEEE Sens. J. 2020, 20, 10502–10510. [Google Scholar] [CrossRef]
- Jeng, J.T.; Yang, S.Y.; Horng, H.E.; Yang, H.C. Detection of deep flaws by using a HTS-SQUID in unshielded environment. IEEE Trans. Appl. Supercond. 2001, 11, 1295–1298. [Google Scholar] [CrossRef]
- Jeng, J.T.; Horng, H.E.; Yang, H.C.; Chen, J.C.; Chen, J.H. Simulation of the magnetic field due to defects and verification using high-Tc SQUID. Phys. C Supercond. 2002, 367, 298–302. [Google Scholar] [CrossRef]
- Smith, C.H.; Schneider, R.W.; Dogaru, T.; Smith, S.T. Eddy-Current Testing with GMR Magnetic Sensor Arrays. In AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2004; Volume 700, pp. 406–413. [Google Scholar]
- Postolache, O.; Ribeiro, A.L.; Ramos, H.G. GMR array uniform eddy current probe for defect detection in conductive specimens. Measurement 2013, 46, 4369–4378. [Google Scholar] [CrossRef]
- Lin, G.; Makarov, D.; Schmidt, O.G. Magnetic sensing platform technologies for biomedical applications. Lab Chip 2017, 17, 1884–1912. [Google Scholar] [CrossRef]
- Luong, V.S.; Su, Y.-H.; Lu, C.-C.; Jeng, J.-T.; Hsu, J.-H.; Liao, M.-H.; Wu, J.-C.; Lai, M.-H.; Chang, C.-R. Planarization, Fabrication and Characterization of Three-dimensional Magnetic Field Sensors. IEEE Trans. Nanotechnol. 2018, 17, 11–25. [Google Scholar] [CrossRef]
- Karpenko, O.; Efremov, A.; Ye, C.; Udpa, L. Multi-frequency fusion algorithm for detection of defects under fasteners with EC-GMR probe data. NDT E Int. 2020, 110, 102227. [Google Scholar] [CrossRef]
- Ehlers, H.; Pelkner, M.; Thewes, R. Heterodyne Eddy Current Testing Using Magnetoresistive Sensors for Additive Manufacturing Purposes. IEEE Sens. J. 2020, 20, 5793–5800. [Google Scholar] [CrossRef]
- Ye, C.; Huang, Y.; Udpa, L.; Udpa, S.S. Differential Sensor Measurement with Rotating Current Excitation for Evaluating Multilayer Structures. IEEE Sens. J. 2016, 16, 782–789. [Google Scholar] [CrossRef]
- Sasi, B.; Arjun, V.; Mukhopadhyay, C.K.; Rao, B.P.C. Enhanced detection of deep seated flaws in 316 stainless steel plates using integrated EC-GMR sensor. Sens. Actuators A Phys. 2018, 275, 44–50. [Google Scholar]
- Chomsuwan, K.; Yamada, S.; Iwahara, M. Bare PCB Inspection System With SV-GMR Sensor Eddy-Current Testing Probe. IEEE Sens. J. 2007, 7, 890–896. [Google Scholar] [CrossRef][Green Version]
- Pasadas, D.J.; Ribeiro, A.L.; Rocha, T.; Ramos, H.G. 2D surface defect images applying Tikhonov regularized inversion and ECT. NDT E Int. 2016, 80, 48–57. [Google Scholar] [CrossRef]
- Dogaru, T.; Smith, S.T. Giant magnetoresistance-based eddy-current sensor. IEEE Trans. Magn. 2001, 37, 3831–3838. [Google Scholar] [CrossRef]
- Romero-Arismendi, N.O.; Pérez-Benítez, J.A.; Ramírez-Pacheco, E.; Espina-Hernández, J.H. Design method for a GMR-based eddy current sensor with optimal sensitivity. Sens. Actuators A Phys. 2020, 314. [Google Scholar] [CrossRef]
- Helifa, B.; Oulhadj, A.; Benbelghit, A.; Lefkaier, I.K.; Boubenider, F.; Boutassouna, D. Detection and measurement of surface cracks in ferromagnetic materials using eddy current testing. NDT E Int. 2006, 39, 384–390. [Google Scholar] [CrossRef]
- Holzl, P.A.; Zagar, B.G. Improving the Spatial Resolution of Magneto Resistive Sensors via Deconvolution. IEEE Sens. J. 2013, 13, 4296–4304. [Google Scholar] [CrossRef]
- Kikuchi, H.; Tschuncky, R.; Szielasko, K. Challenges for detection of small defects of submillimeter size in steel using magnetic flux leakage method with higher sensitive magnetic field sensors. Sens. Actuators A Phys. 2019, 300, 111642. [Google Scholar] [CrossRef]
- Kawano, J.; Hato, T.; Adachi, S.; Oshikubo, Y.; Tsukamoto, A.; Tanabe, K. Non-Destructive Evaluation of Deep-Lying Defects in Multilayer Conductors Using HTS SQUID Gradiometer. IEEE Trans. Appl. Supercond. 2011, 21, 428–431. [Google Scholar] [CrossRef]
- Nadzri, N.A.i.; Saari, M.M.; Zaini, M.A.H.P.; Halil, A.M.; Ishak, M.; Tsukada, K. Anisotropy magnetoresistance differential probe for characterization of sub-millimeter surface defects on galvanized steel plate. Meas. Control 2021, 54, 1273–1285. [Google Scholar] [CrossRef]
- Vyhnánek, J.; Janošek, M.; Ripka, P. AMR gradiometer for mine detection. Sens. Actuators A Phys. 2012, 186, 100–104. [Google Scholar] [CrossRef][Green Version]
- He, G.; Zhang, Y.; Hu, Y.; Zhang, X.; Xiao, G. Magnetic tunnel junction based gradiometer for detection of cracks in cement. Sens. Actuators A Phys. 2021, 331. [Google Scholar] [CrossRef]
- Bonavolonta, C.; Valentino, M.; Marrocco, N.; Pepe, G.P. Eddy Current Technique Based on HTc-SQUID and GMR Sensors for Non-Destructive Evaluation of Fiber/Metal Laminates. IEEE Trans. Appl. Supercond. 2009, 19, 808–811. [Google Scholar] [CrossRef]
- Mao, S.; Gangopadhyay, S.; Amin, N.; Murdock, E. NiMn-pinned spin valves with high pinning field made by ion beam sputtering. Appl. Phys. Lett. 1996, 69, 3593–3595. [Google Scholar] [CrossRef]
- Tsukada, K.; Hayashi, M.; Nakamura, Y.; Sakai, K.; Kiwa, T. Small Eddy Current Testing Sensor Probe Using a Tunneling Magnetoresistance Sensor to Detect Cracks in Steel Structures. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Claycomb, J.R.; Tralshawala, N.; Cho, H.M.; Boyd, M.; Zou, Z.; Xu, X.W.; Miller, J.H., Jr. Simulation and design of a superconducting eddy current probe for nondestructive testing. Rev. Sci. Instrum. 1998, 69, 499–506. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Jeng, J.T.; Doan, V.D.; Dinh, C.H.; Dao, D.V.; Pham, T.T.; Trinh, X.T. Surface and Subsurface Eddy-Current Imaging with GMR Sensor. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Hamia, R.; Cordier, C.; Dolabdjian, C. Eddy-current non-destructive testing system for the determination of crack orientation. NDT E Int. 2014, 61, 24–28. [Google Scholar] [CrossRef]
- Lu, M.; Meng, X.; Huang, R.; Chen, L.; Tang, Z.; Li, J.; Peyton, A.; Yin, W. Determination of Surface Crack Orientation Based on Thin-Skin Regime Using Triple-Coil Drive–Pickup Eddy-Current Sensor. IEEE Trans. Instrum. Meas. 2021, 70, 1–9. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Dimensions |
|---|---|
| Inside dimensions | 1.6 mm × 1.8 mm |
| Outside dimensions | 2.9 mm × 3.1 mm |
| Height | 1.42 mm |
| Diameter of wire | 0.05 mm |
| Minimum lift-off l0 | 0.2 mm |
| Number of turns | 252 |
| Defects Number | D1 (mm) | D2 (mm) | D3 (mm) |
|---|---|---|---|
| F1 | 0.75 | 1.75 | 4.75 |
| F2 | 1.5 | 3.5 | 6.5 |
| F3 | 2.0 | 4.5 | 7.5 |
| F4 | 3.5 | 5.5 | 8.5 |
| STT | Buried Depth (mm) | Frequency (kHz) | Amplitude SNR (dB) | Phase SNR (dB) |
|---|---|---|---|---|
| 1 | 0 | 45 | 37.8 | 50.9 |
| 2 | 0.095 | 40 | 35.5 | 44.2 |
| 3 | 0.285 | 30 | 29.8 | 36.6 |
| Cracks Number | Real Angle (°) | Angle from Amplitude Image (°) | Angle from Phase Image (°) | Angle Error for Amplitude Image (°) | Angle Error for Phase Image (°) |
|---|---|---|---|---|---|
| A1 | 0 | 0.6 | 0.3 | 0.6 | 0.3 |
| A2 | 30 | 30.4 | 29.8 | 0.4 | 0.2 |
| A3 | 45 | 44.9 | 44.1 | 0.1 | 0.9 |
| A4 | 60 | 59.8 | 58.5 | 0.2 | 1.5 |
| A5 | 90 | 90.6 | 90.8 | 0.6 | 0.8 |
| A6 | 120 | 121.6 | 122.6 | 1.6 | 2.6 |
| A7 | 135 | 136 | 136.8 | 1.0 | 1.8 |
| A8 | 150 | 150.8 | 151.1 | 0.8 | 1.1 |
| Probe | Spatial Resolution (mm) | SNR (dB) | S/E Size Ratio |
|---|---|---|---|
| Proposed probe | 0.4 | 29.7 | 0.13 |
| Coil-based probe | 1.0 | 39.5 | 1.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, H.-T.; Jeng, J.-T.; Doan, V.-D.; Dinh, C.-H.; Trinh, X.T.; Dao, D.-V. Detection of Surface and Subsurface Flaws with Miniature GMR-Based Gradiometer. Sensors 2022, 22, 3097. https://doi.org/10.3390/s22083097
Nguyen H-T, Jeng J-T, Doan V-D, Dinh C-H, Trinh XT, Dao D-V. Detection of Surface and Subsurface Flaws with Miniature GMR-Based Gradiometer. Sensors. 2022; 22(8):3097. https://doi.org/10.3390/s22083097
Chicago/Turabian StyleNguyen, Huu-Thang, Jen-Tzong Jeng, Van-Dong Doan, Chinh-Hieu Dinh, Xuan Thang Trinh, and Duy-Vinh Dao. 2022. "Detection of Surface and Subsurface Flaws with Miniature GMR-Based Gradiometer" Sensors 22, no. 8: 3097. https://doi.org/10.3390/s22083097
APA StyleNguyen, H.-T., Jeng, J.-T., Doan, V.-D., Dinh, C.-H., Trinh, X. T., & Dao, D.-V. (2022). Detection of Surface and Subsurface Flaws with Miniature GMR-Based Gradiometer. Sensors, 22(8), 3097. https://doi.org/10.3390/s22083097