
Deep Unfolding of Iteratively Reweighted ADMM for Wireless RF Sensing


Abstract
:1. Introduction
1.1. Contribution
- We propose a generic approach based on the non-convex fully double-reweighted approach, i.e., both reweighted -norm and reweighted nuclear norm simultaneously to solve the RPCA problem. To this end, we propose an iterative algorithm based on ADMM to estimate the low-rank and sparse components jointly.
- In contrast to standard/classical RPCA, we consider the compressive sensing data acquisition model, which reflects more on the practical problem at hand. Next, to improve the accuracy and convergence speed of the ADMM-based iterative algorithm, we propose a deep neural network (DNN) to tune the parameters of the iterative algorithm (i.e., algorithm unfolding/unrolling) from training data.
- We intensively evaluate our proposed approach for a generic Gaussian data acquisition model with . In addition to that, the defect detection by SFCW radar from compressive measurements with is considered. To compare our approach, we consider the standard convex approach (i.e., nuclear norm and -norm minimization) and the untrained ADMM-based iterative algorithm for different compression ratios. In both the generic Gaussian data acquisition model and SFCW-based defect detection, our numerical results show that the proposed approach outperforms the conventional approaches in terms of mean squared errors of the recovered low-rank and sparse components and the speed of convergence.
- In the context of algorithm unrolling for RPCA, we compare our approach with the approach given in [30] (CORONA). It turns out that our proposed approach shows similar performance as CORONA for experimental ultrasound imaging data used in [30], and our approach outperforms CORONA for generic Gaussian data. It is worth noticing that there is a row-sparse nature of the experimental ultrasound data. That is the reason CORONA uses -norm minimization to estimate sparse matrix . Our approach is generic, yet our approach is able to achieve similar results as CORONA by learning. This shows the applicability of our approach to different types of use cases and data (defect detection, ultrasound imaging, generic Gaussian data).
- We numerically analyze the robustness of our proposed approach for the generic Gaussian data acquisition model. Here, we consider the deviation in the measurement matrices () and testing signal-to-noise ratio (SNR) uncertainty. It was observed that the proposed approach is robust for a small deviation in the measurement matrices. Further, it was observed that training with the SNR like 5 dB is favorable when SNR of the testing data is unknown.
1.2. Notation
2. System Model
2.1. SFCW Radar Based Defect Detection
2.2. Compressed Sensing (CS) Approach
2.3. Low-Rank Plus Sparse Recovery Algorithm
2.4. Element-Wise Soft-Thresholding and Singular Value Soft-Thresholding
3. Unfolding ADMM-Based Low-Rank Plus Sparse Recovery Algorithm
| Algorithm 1: Low-rank plus sparse recovery algorithm. |
 |
3.1. Training Phase
3.2. Computation Complexity
4. Results and Discussion
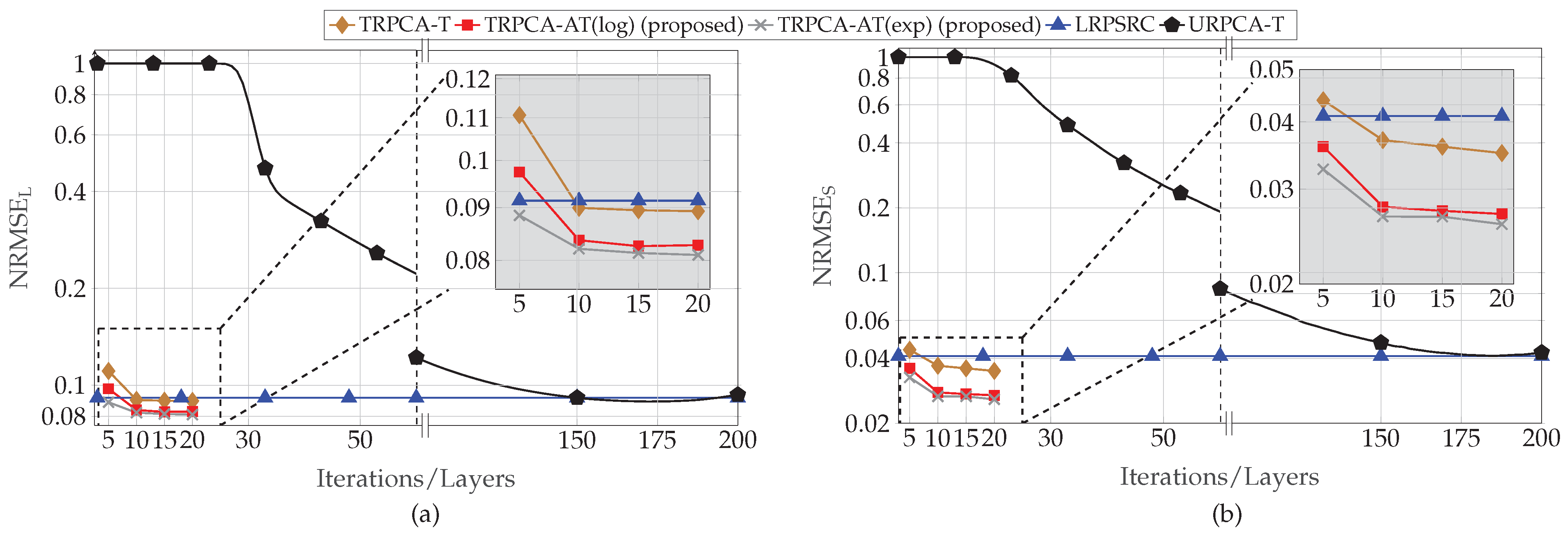
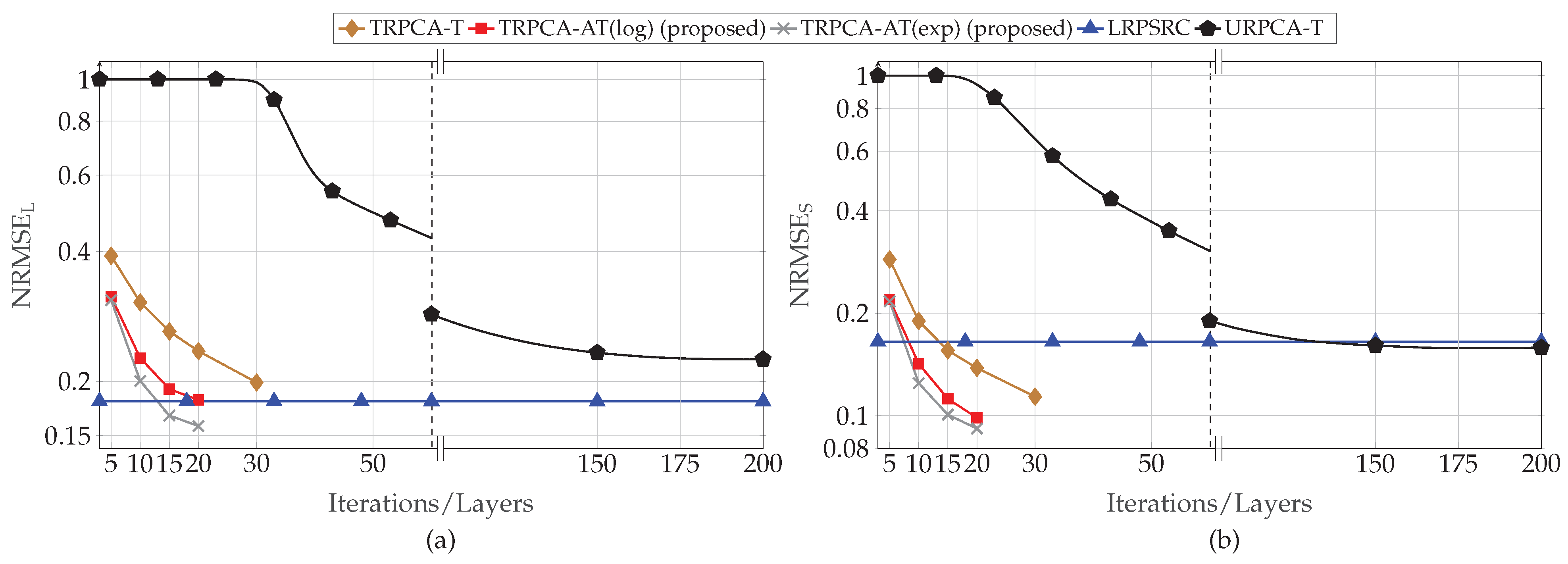
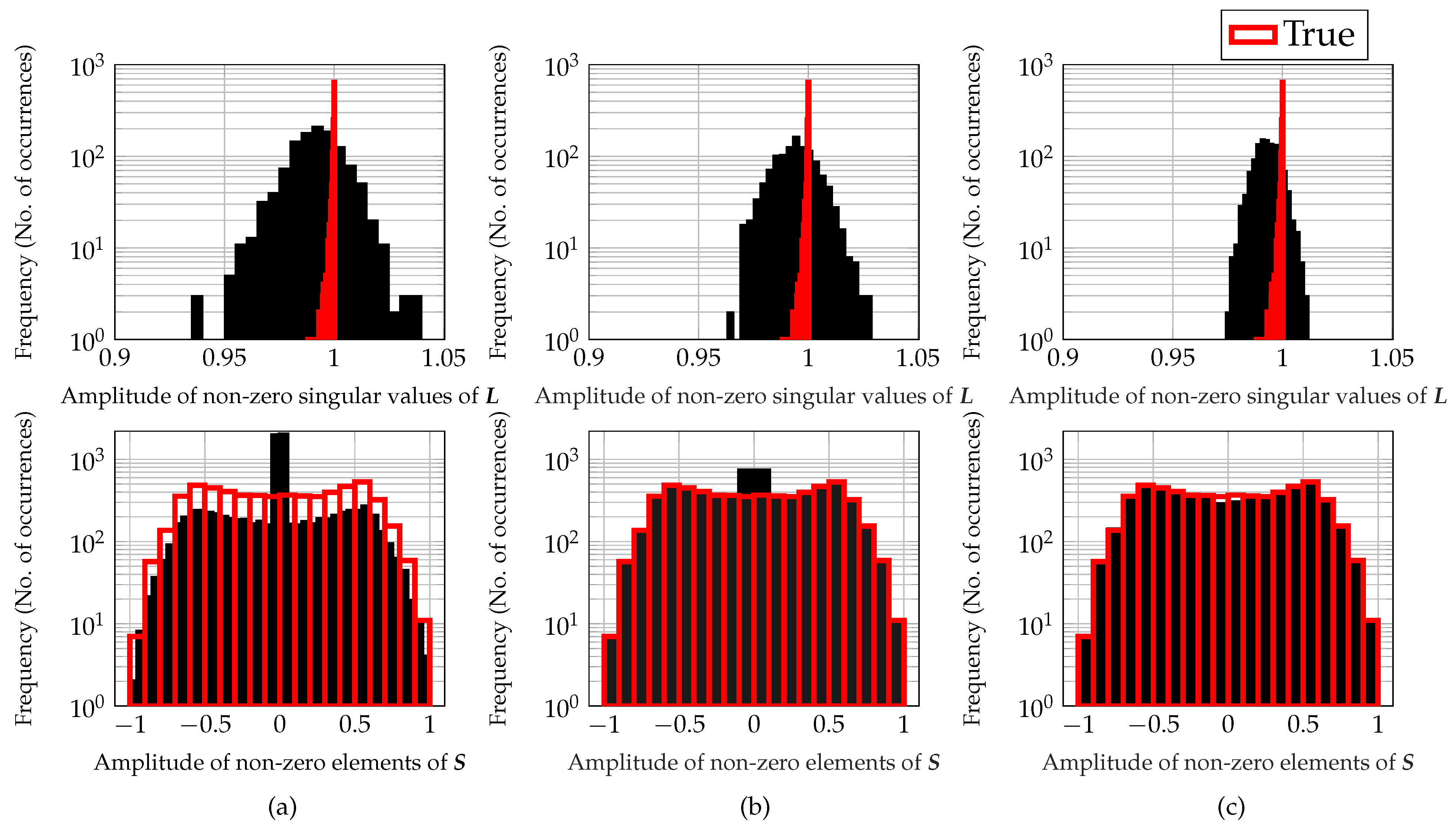
4.1. Generic Gaussian Model
4.1.1. Cramér–Rao Bound (CRB) Analysis
4.1.2. Robustness of the Proposed Approach
4.1.3. ADMM or FISTA to Solve RPCA Problem
4.1.4. Performance Evaluation for Experimental Ultrasound Imaging Data
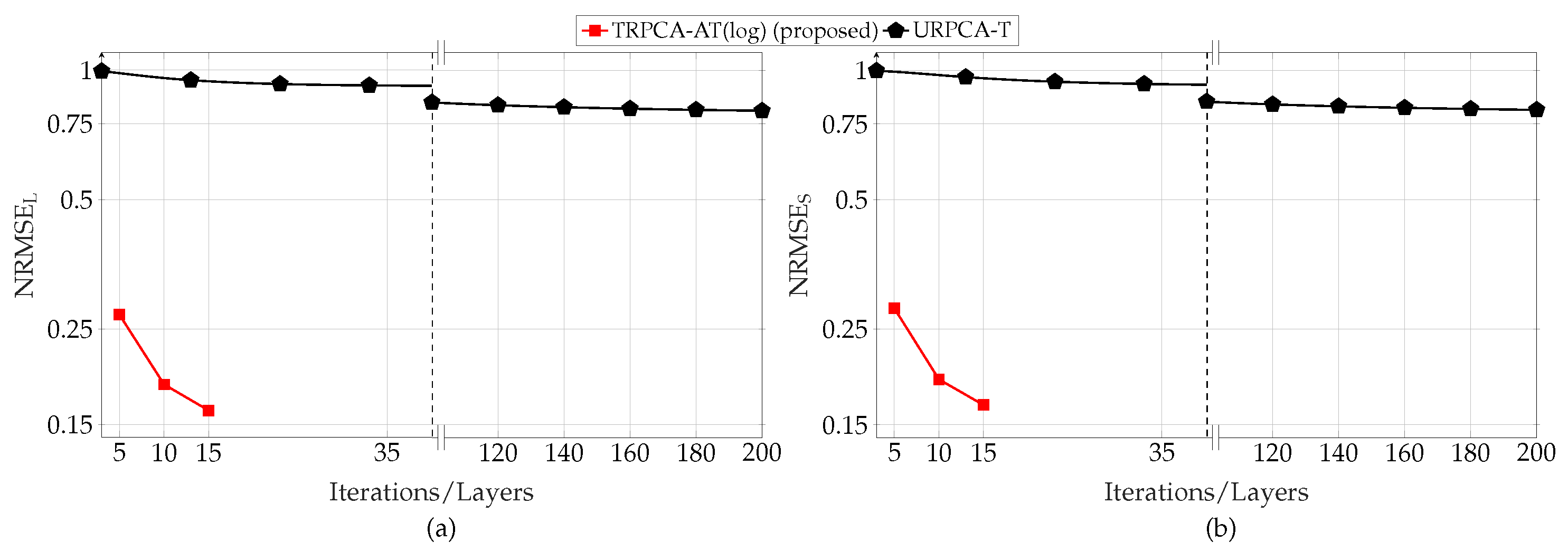
4.2. SFCW Radar Model
4.2.1. SFCW Small-Scale Simulations
4.2.2. SFCW Large-Scale Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviations | |
| ADMM | Alternating direction method of multipliers |
| APG | Accelerated proximal gradient |
| BS | Background subtraction |
| CORONA | Convolutional robust principal component analysis |
| CRB | Cramér–Rao bound |
| CS | Compressive sensing |
| DNN | Deep neural network |
| EM | Electromagnetic |
| FISTA | Fast iterative soft-thresholding algorithm |
| GHz | Gigahertz |
| ISTA | Iterative soft-thresholding algorithm |
| LISTA | Learned iterative soft-thresholding algorithm |
| LRPSRC | Low-rank plus sparse recovery with convex relaxation |
| MSE | Mean squared error |
| NRMSE | Normalized average root mean squared error |
| MIMO | Multiple-input and multiple-output |
| RADAR | Radio detection and ranging |
| RF | Radio frequency |
| RPCA | Robust principal component analysis |
| SFCW | Stepped-frequency continuous wave |
| SGD | Stochastic gradient descent |
| SNR | Signal-to-noise ratio |
| SP | Subspace projection |
| SVD | Singular value decomposition |
| TRPCA-AT(exp) | Trained RPCA with adaptive thresholding based on exponential heuristic |
| TRPCA-AT(log) | Trained RPCA with adaptive thresholding based on logarithm heuristic |
| TRPCA-T | Trained RPCA with thresholding |
| URPCA-T | Untrained RPCA with thresholding |
| Variable | |
| A positive constant used in decay functions | |
| ADMM auxiliary variables | |
| ADMM penalty factor | |
| Bandwidth of the SFCW radar | |
| Carrier frequency of the SFCW radar | |
| Complex reflectivity coefficient of the p-th defect | |
| Complex reflectivity of the layered material structure | |
| Compression operators/measurement matrices | |
| Compression ratio | |
| Learning rate of the parameters () of the DNN | |
| Learning rate of the weights () of the linear layers of | |
| the DNN | |
| Low-rank matrix | |
| -th frequency band | |
| Number of defects | |
| Number of epochs | |
| Number of frequency bands in SFCW radar system | |
| Number of testing samples | |
| Number of training samples | |
| Number of transceivers in SFCW radar system | |
| Parameters set that DNN learns (,, ) | |
| Rank of the low-rank matrix | |
| Received signal matrix corresponding to all M transceivers and | |
| N frequencies | |
| Reduced received data vector | |
| Reflection of the defects corresponding to all M transceivers and | |
| N frequencies | |
| Reflection of the layered material structure corresponding to all M | |
| transceivers and N frequencies | |
| Regularization parameters | |
| Selection matrix | |
| Singular value soft-thresholding parameter | |
| Singular values of | |
| Size of the rectangular grid of the radar scene | |
| Soft-thresholding parameter | |
| Sparse matrix | |
| The grid matrix of the radar scene | |
| Vector that contains all the values of the defects | |
| Vector that contains all the singular-value threshold values for in the -th iteration | |
| Vector that contains all the soft-threshold values for in the -th iteration | |
| , , , | Weights of the t-th layer of the DNN |
Appendix A
Appendix A.1. Element-Wise Soft-Thresholding and Singular Value Soft-Thresholding
Appendix A.2. Computation Complexity
Appendix A.3. Cramér–Rao Bound (CRB) and Recovery Guarantees of RPCA
Appendix A.4. Three-Stage Training Process for SFCW Data
References
- Tang, V.H.; Bouzerdoum, A.; Phung, S.L. Multipolarization Through-Wall Radar Imaging Using Low-Rank and Jointly-Sparse Representations. IEEE Trans. Image Process. 2018, 27, 1763–1776. [Google Scholar] [CrossRef] [PubMed]
- Kariminezhad, A.; Sezgin, A. Spatio-Temporal Waveform Design in Active Sensing Systems with Multilayer Targets. In Proceedings of the 2019 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- Miriya Thanthrige, U.S.K.P.; Barowski, J.; Rolfes, I.; Erni, D.; Kaiser, T.; Sezgin, A. Characterization of Dielectric Materials by Sparse Signal Processing With Iterative Dictionary Updates. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Chopard, A.; Sleiman, J.B.; Cassar, Q.; Guillet, J.; Pan, M.; Perraud, J.; Susset, A.; Mounaix, P. Terahertz waves for contactless control and imaging in aeronautics industry. NDT E Int. 2021, 122, 102473. [Google Scholar] [CrossRef]
- Zahran, O.; Kasban, H.; El-Kordy, M.; Abd El-Samie, F. Automatic weld defect identification from radiographic images. NDT E Int. 2013, 57, 26–35. [Google Scholar] [CrossRef]
- Stoik, C.D.; Bohn, M.J.; Blackshire, J.L. Nondestructive evaluation of aircraft composites using transmissive Terahertz time domain spectroscopy. Opt. Express 2008, 16, 17039–17051. [Google Scholar] [CrossRef]
- Unnikrishnakurup, S.; Dash, J.; Ray, S.; Pesala, B.; Balasubramaniam, K. Nondestructive evaluation of thermal barrier coating thickness degradation using pulsed IR thermography and THz-TDS measurements: A comparative study. NDT E Int. 2020, 116, 102367. [Google Scholar] [CrossRef]
- Huang, Q.; Qu, L.; Wu, B.; Fang, G. UWB through-wall imaging based on compressive sensing. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1408–1415. [Google Scholar] [CrossRef]
- Khan, U.S.; Al-Nuaimy, W. Background removal from GPR data using eigenvalues. In Proceedings of the XIII Int. Conf. on Ground Penetrating Radar, Lecce, Italy, 21–25 June 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Sánchez-Pastor, J.; Miriya Thanthrige, U.S.; Ilgac, F.; Jiménez-Sáez, A.; Jung, P.; Sezgin, A.; Jakoby, R. Clutter Suppression for Indoor Self-Localization Systems by Iteratively Reweighted Low-Rank Plus Sparse Recovery. Sensors 2021, 21, 6842. [Google Scholar] [CrossRef]
- Qiao, Z.; Elhattab, A.; Shu, X.; He, C. A second-order stochastic resonance method enhanced by fractional-order derivative for mechanical fault detection. Nonlinear Dyn. 2021, 106, 707–723. [Google Scholar] [CrossRef]
- Qiao, Z.; Liu, J.; Xu, X.; Yin, A.; Shu, X. Nonlinear resonance decomposition for weak signal detection. Rev. Sci. Instrum. 2021, 92, 105102. [Google Scholar] [CrossRef]
- Yun, X.; Mei, X.; Jiang, G. Time-delayed feedback stochastic resonance enhanced minimum entropy deconvolution for weak fault detection of rolling element bearings. Chin. J. Phys. 2022, 76, 1–13. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. A comparative analysis of signal decomposition techniques for structural health monitoring on an experimental benchmark. Sensors 2021, 21, 1825. [Google Scholar] [CrossRef] [PubMed]
- Jahromi, M.G.; Parsaei, H.; Zamani, A.; Stashuk, D.W. Cross comparison of motor unit potential features used in EMG signal decomposition. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1017–1025. [Google Scholar] [CrossRef] [PubMed]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? J. ACM 2011, 58, 1–37. [Google Scholar] [CrossRef]
- Tang, G.; Nehorai, A. Constrained Cramér–Rao bound on robust principal component analysis. IEEE Trans. Signal Process. 2011, 59, 5070–5076. [Google Scholar] [CrossRef]
- Bruckstein, A.M.; Donoho, D.L.; Elad, M. From sparse solutions of systems of equations to sparse modeling of signals and images. SIAM Rev. 2009, 51, 34–81. [Google Scholar] [CrossRef] [Green Version]
- Cai, J.F.; Candès, E.J.; Shen, Z. A singular value thresholding algorithm for matrix completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]
- Fazel, M.; Hindi, H.; Boyd, S.P. A rank minimization heuristic with application to minimum order system approximation. In Proceedings of the 2001 American Control Conference, Arlington, VA, USA, 25–27 June 2001; Volume 6, pp. 4734–4739. [Google Scholar] [CrossRef] [Green Version]
- Gu, S.; Xie, Q.; Meng, D.; Zuo, W.; Feng, X.; Zhang, L. Weighted Nuclear norm minimization and its applications to low level vision. Int. J. Comput. Vis. 2017, 121, 183–208. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing sparsity by reweighted ℓ1 minimization. J. Fourier Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Daubechies, I.; DeVore, R.; Fornasier, M.; Güntürk, C.S. Iteratively reweighted least squares minimization for sparse recovery. Commun. Pure Appl. Math. J. Issued Courant Inst. Math. Sci. 2010, 63, 1–38. [Google Scholar] [CrossRef] [Green Version]
- Mohan, K.; Fazel, M. Reweighted Nuclear norm minimization with application to system identification. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 2953–2959. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.B.; Li, D. Reweighted ℓ1-Minimization for Sparse Solutions to Underdetermined Linear Systems. SIAM J. Optim. 2012, 22, 1065–1088. [Google Scholar] [CrossRef]
- Yuan, X.; Yang, J. Sparse and low-rank matrix decomposition via alternating direction methods. Preprint 2009, 12. Available online: https://www.google.com.hk/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwiu0vHD_ZT3AhVMa94KHZKYCekQFnoECAMQAQ&url=http%3A%2F%2Fwww.optimization-online.org%2FDB_FILE%2F2009%2F11%2F2447.pdf&usg=AOvVaw3_eiF4RSDg53xlwdI7C6sF (accessed on 10 January 2022).
- Lin, Z.; Chen, M.; Ma, Y. The augmented lagrange multiplier method for exact recovery of corrupted low-rank matrices. arXiv 2010, arXiv:1009.5055. [Google Scholar]
- Lin, Z.; Ganesh, A.; Wright, J.; Wu, L.; Chen, M.; Ma, Y. Fast convex optimization algorithms for exact recovery of a corrupted low-rank matrix (Report no. UILU-ENG-09-2214, DC-246). In Coordinated Science Laboratory; 2009; Available online: https://www.ideals.illinois.edu/bitstream/handle/2142/74352/B40-DC_246.pdf?sequence=2 (accessed on 10 January 2022).
- Solomon, O.; Cohen, R.; Zhang, Y.; Yang, Y.; He, Q.; Luo, J.; van Sloun, R.J.G.; Eldar, Y.C. Deep Unfolded Robust PCA With Application to Clutter Suppression in Ultrasound. IEEE Trans. Med. Imag. 2020, 39, 1051–1063. [Google Scholar] [CrossRef] [Green Version]
- Gregor, K.; LeCun, Y. Learning fast approximations of sparse coding. In Proceedings of the 27th International Conference on International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010; pp. 399–406. [Google Scholar]
- Kim, D.; Park, D. Element-Wise Adaptive Thresholds for Learned Iterative Shrinkage Thresholding Algorithms. IEEE Access 2020, 8, 45874–45886. [Google Scholar] [CrossRef]
- Musa, O.; Jung, P.; Caire, G. Plug-And-Play Learned Gaussian-mixture Approximate Message Passing. In Proceedings of the ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 4855–4859. [Google Scholar] [CrossRef]
- Li, Y.; Tofighi, M.; Geng, J.; Monga, V.; Eldar, Y.C. Efficient and Interpretable Deep Blind Image Deblurring Via Algorithm Unrolling. IEEE Trans. Comput. Imag. 2020, 6, 666–681. [Google Scholar] [CrossRef]
- Monga, V.; Li, Y.; Eldar, Y.C. Algorithm Unrolling: Interpretable, Efficient Deep Learning for Signal and Image Processing. IEEE Signal Process. Mag. 2021, 38, 18–44. [Google Scholar] [CrossRef]
- Gu, S.; Zhang, L.; Zuo, W.; Feng, X. Weighted Nuclear norm minimization with application to image denoising. In Proceedings of the IEEE Conf. on Comput. Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2862–2869. [Google Scholar] [CrossRef] [Green Version]
- Cohen, R.; Zhang, Y.; Solomon, O.; Toberman, D.; Taieb, L.; van Sloun, R.J.; Eldar, Y.C. Deep Convolutional Robust PCA with Application to Ultrasound Imaging. In Proceedings of the ICASSP 2019–2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 3212–3216. [Google Scholar] [CrossRef]
- Gabay, D.; Mercier, B. A dual algorithm for the solution of nonlinear variational problems via finite element approximation. Comput. Math. Appl. 1976, 2, 17–40. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Feng, J.; Yan, S.; Lin, Z. A Unified Alternating Direction Method of Multipliers by Majorization Minimization. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 527–541. [Google Scholar] [CrossRef] [Green Version]
- Mu, Y.; Dong, J.; Yuan, X.; Yan, S. Accelerated low-rank visual recovery by random projection. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 2609–2616. [Google Scholar]
- Wei, C.; Chen, C.; Wang, Y.F. Robust Face Recognition With Structurally Incoherent Low-Rank Matrix Decomposition. IEEE Trans. Image Process. 2014, 23, 3294–3307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rangan, S.; Schniter, P.; Fletcher, A.K.; Sarkar, S. On the convergence of approximate message passing with arbitrary matrices. IEEE Trans. Inf. Theory 2019, 65, 5339–5351. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Xie, L.; Zhang, C. Off-grid direction of arrival estimation using sparse Bayesian inference. IEEE Trans. Signal Process. 2012, 61, 38–43. [Google Scholar] [CrossRef] [Green Version]
- Wipf, D.; Nagarajan, S. Iterative Reweighted ℓ1 and ℓ2 Methods for Finding Sparse Solutions. IEEE J. Sel. Top. Signal Process. 2010, 4, 317–329. [Google Scholar] [CrossRef]
- Malek-Mohammadi, M.; Babaie-Zadeh, M.; Skoglund, M. Iterative Concave Rank Approximation for Recovering Low-Rank Matrices. IEEE Trans. Signal Process. 2014, 62, 5213–5226. [Google Scholar] [CrossRef] [Green Version]
- Fazel, M.; Hindi, H.; Boyd, S.P. Log-det heuristic for matrix rank minimization with applications to Hankel and Euclidean distance matrices. In Proceedings of the 2003 American Control Conf., Denver, CO, USA, 4–6 June 2003; Volume 3, pp. 2156–2162. [Google Scholar] [CrossRef]
- Lu, C.; Tang, J.; Yan, S.; Lin, Z. Nonconvex Nonsmooth Low Rank Minimization via Iteratively Reweighted Nuclear Norm. IEEE Trans. Image Process. 2016, 25, 829–839. [Google Scholar] [CrossRef] [Green Version]
- Peng, Y.; Suo, J.; Dai, Q.; Xu, W. Reweighted low-rank matrix recovery and its application in image restoration. IEEE Trans. Cybernetics 2014, 44, 2418–2430. [Google Scholar] [CrossRef]
- Chivers, I.; Sleightholme, J. An introduction to Algorithms and the Big O Notation. In Introduction to Programming with Fortran; Springer: Berlin/Heidelberg, Germany, 2015; pp. 359–364. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2017, arXiv:1412.6980. [Google Scholar]
- The MathWorks Inc. MATLAB: Version 9.6.0 (R2019a); The MathWorks Inc.: Natick, MA, USA, 2019. [Google Scholar]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, Version 2.1; 2014; Available online: http://cvxr.com/cvx (accessed on 10 January 2022).
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. Adv. Neural Inf. Process. Syst. 2019, 32, 8024–8035. [Google Scholar]
- Ahmed, A.M.; Thanthrige, U.S.K.M.; El Gamal, A.; Sezgin, A. Deep Learning for DOA Estimation in MIMO Radar Systems via Emulation of Large Antenna Arrays. IEEE Commun. Lett. 2021, 25, 1559–1563. [Google Scholar] [CrossRef]
- Sutskever, I.; Martens, J.; Dahl, G.; Hinton, G. On the importance of initialization and momentum in deep learning. In Proceedings of the International Conference on Machine Learning, Atlanta, GA, USA, 17–19 June 2013; pp. 1139–1147. [Google Scholar]
- Candès, E.J.; Recht, B. Exact matrix completion via convex optimization. Found. Comput. Math. 2009, 9, 717–772. [Google Scholar] [CrossRef] [Green Version]
- Gross, D. Recovering low-rank matrices from few coefficients in any basis. IEEE Trans. Inf. Theory 2011, 57, 1548–1566. [Google Scholar] [CrossRef] [Green Version]
- Candès, E.J.; Tao, T. The power of convex relaxation: Near-optimal matrix completion. IEEE Trans. Inf. Theory 2010, 56, 2053–2080. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Compression Ratio () % | Number of Iterations | ||
|---|---|---|---|---|
| Low-Rank Matrix L | Sparse Matrix S | |||
| TRPCA-AT(log) | 10 | |||
| TRPCA-AT(exp) | 10 | |||
| TRPCA-T | 10 | |||
| URPCA-T | 150 | |||
| TRPCA-AT(log) | 20 | |||
| TRPCA-AT(exp) | 20 | |||
| TRPCA-T | 20 | |||
| URPCA-T | 150 | |||
| Method | Average Recovery Error | |
|---|---|---|
| Low-Rank Matrix L | Sparse Matrix S | |
| CORONA [30] | ||
| TRPCA-AT(log) | ||
| TRPCA-AT(exp) | ||
| TRPCA-T | ||
| Method | Average Recovery Error | |
|---|---|---|
| Low-Rank Matrix L | Sparse Matrix S | |
| CORONA [30] | ||
| TRPCA-AT(log) | ||
| Method | Total Power | |
|---|---|---|
| True Locations of the Defects | False Detection | |
| URPCA-T | ||
| TRPCA-AT(log) | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miriya Thanthrige, U.S.K.P.; Jung, P.; Sezgin, A. Deep Unfolding of Iteratively Reweighted ADMM for Wireless RF Sensing. Sensors 2022, 22, 3065. https://doi.org/10.3390/s22083065
Miriya Thanthrige USKP, Jung P, Sezgin A. Deep Unfolding of Iteratively Reweighted ADMM for Wireless RF Sensing. Sensors. 2022; 22(8):3065. https://doi.org/10.3390/s22083065
Chicago/Turabian StyleMiriya Thanthrige, Udaya S. K. P., Peter Jung, and Aydin Sezgin. 2022. "Deep Unfolding of Iteratively Reweighted ADMM for Wireless RF Sensing" Sensors 22, no. 8: 3065. https://doi.org/10.3390/s22083065
APA StyleMiriya Thanthrige, U. S. K. P., Jung, P., & Sezgin, A. (2022). Deep Unfolding of Iteratively Reweighted ADMM for Wireless RF Sensing. Sensors, 22(8), 3065. https://doi.org/10.3390/s22083065