Author Contributions
Conceptualization, K.A., S.A.A. and A.A. (Anas Alburayt); Methodology, K.A. and S.A.A.; Software, S.A.A. and S.H.A.; Validation, A.A. (Ahmed Alwahid), M.A., S.A. and K.S.A.; Formal analysis, K.A.; Investigation, K.A. and K.S.A.; Resources, A.A. (Ahmed Alwahid), M.A. and K.S.A.; Data curation, K.A., S.A.A., A.A. (Ahmed Alwahid), M.A. and K.S.A.; Writing—original draft preparation, K.A. and I.M.A.; Writing—review and editing, I.M.A.; Visualization, K.A. All authors have read and agreed to the published version of the manuscript.
Figure 1.
Schematic diagram of the cross-section of the intra-ply hybrid composite. (a) Carbon yarns were incorrectly aligned on top of each other due to misalignment of the plies, (b) the carbon yarns were integrated with glass fiber aligned perfectly on top of each other.
Figure 1.
Schematic diagram of the cross-section of the intra-ply hybrid composite. (a) Carbon yarns were incorrectly aligned on top of each other due to misalignment of the plies, (b) the carbon yarns were integrated with glass fiber aligned perfectly on top of each other.
Figure 2.
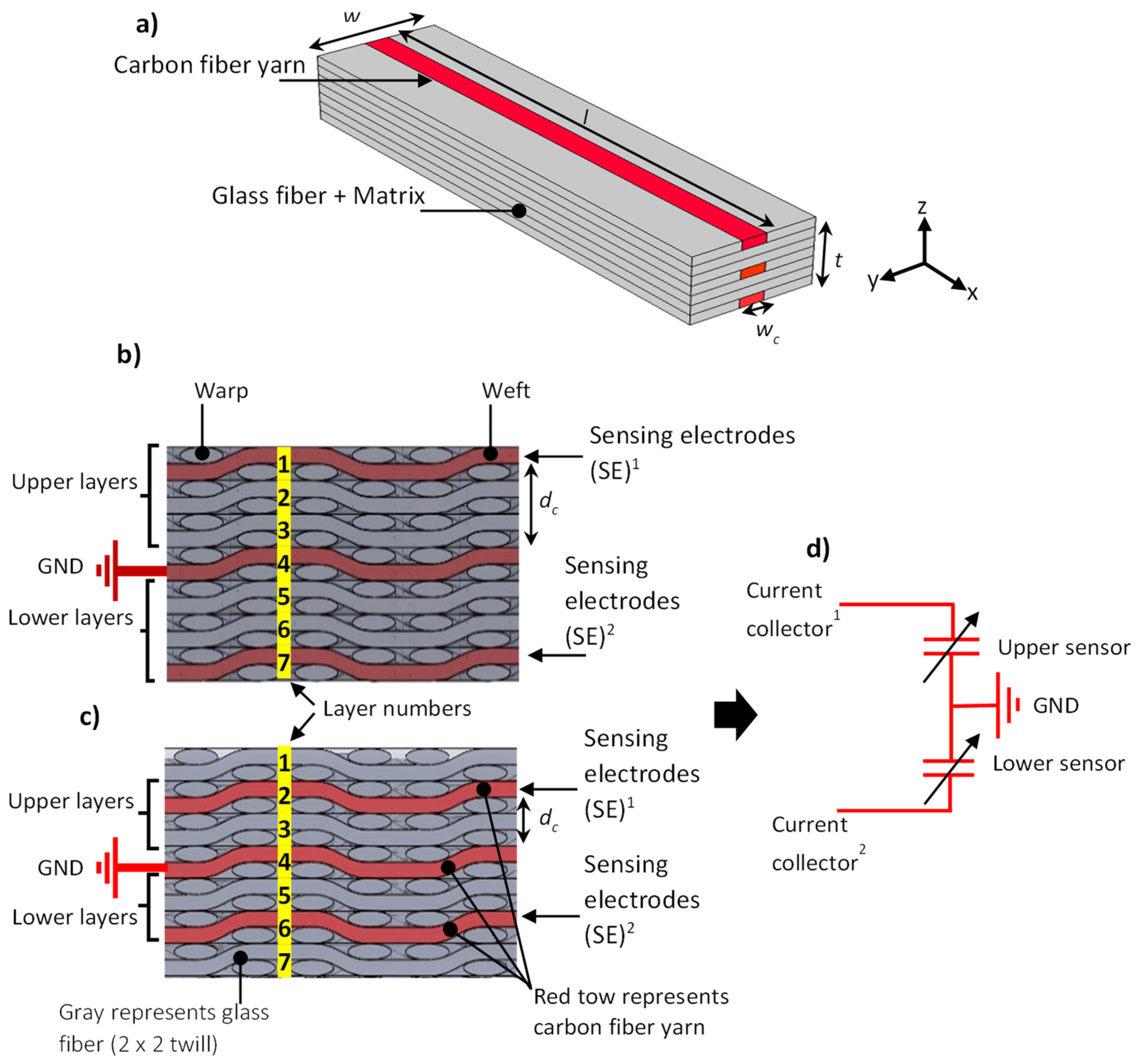
(a) Layout of self-sensing intra-ply hybrid composites, (b,c) show the sensor configurations for type-A and type-B, (d) electrical circuit of the embedded sensor. (SE)1 and (SE)2 represent upper layer and lower layer sensing electrodes respectively.
Figure 2.
(a) Layout of self-sensing intra-ply hybrid composites, (b,c) show the sensor configurations for type-A and type-B, (d) electrical circuit of the embedded sensor. (SE)1 and (SE)2 represent upper layer and lower layer sensing electrodes respectively.
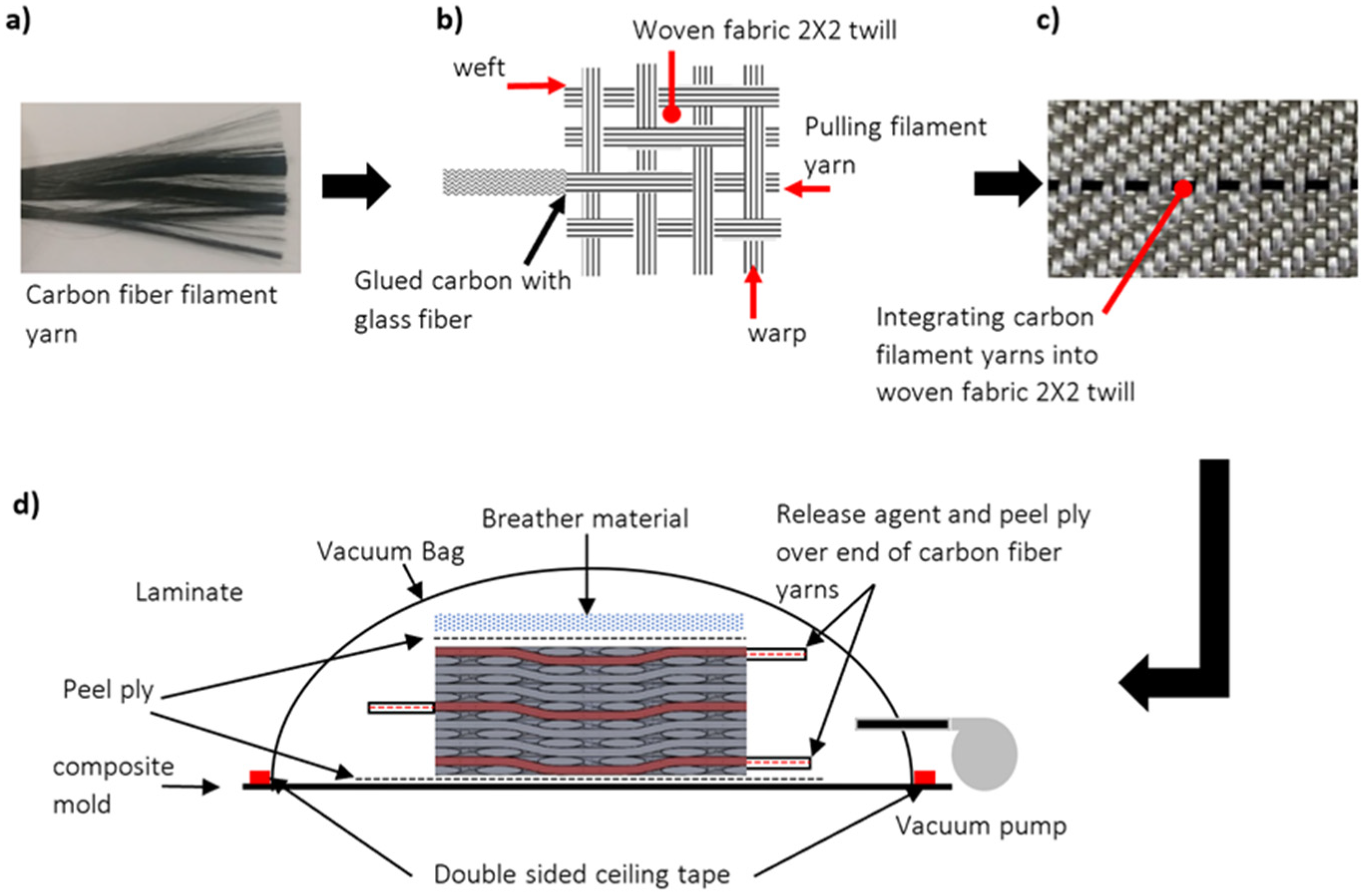
Figure 3.
Fabrication process of the intra-ply hybrid fabric and capacitive sensor: (a) an image of continuous carbon fiber yarn, (b) schema showing the process of integrating continuous carbon fiber yarn into fiberglass woven fabric 2 × 2 twill 280 g/m2, (c) an image of the intra-ply hybrid fabric produced, and (d) schematic presentation of vacuum bagging system.
Figure 3.
Fabrication process of the intra-ply hybrid fabric and capacitive sensor: (a) an image of continuous carbon fiber yarn, (b) schema showing the process of integrating continuous carbon fiber yarn into fiberglass woven fabric 2 × 2 twill 280 g/m2, (c) an image of the intra-ply hybrid fabric produced, and (d) schematic presentation of vacuum bagging system.
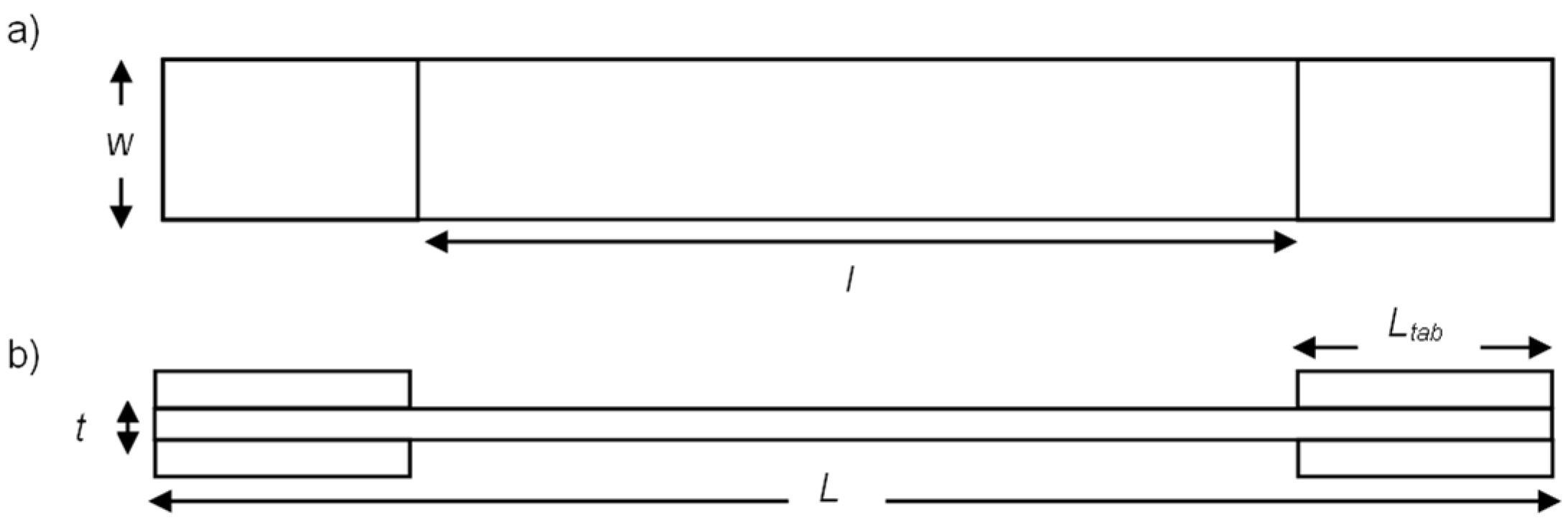
Figure 4.
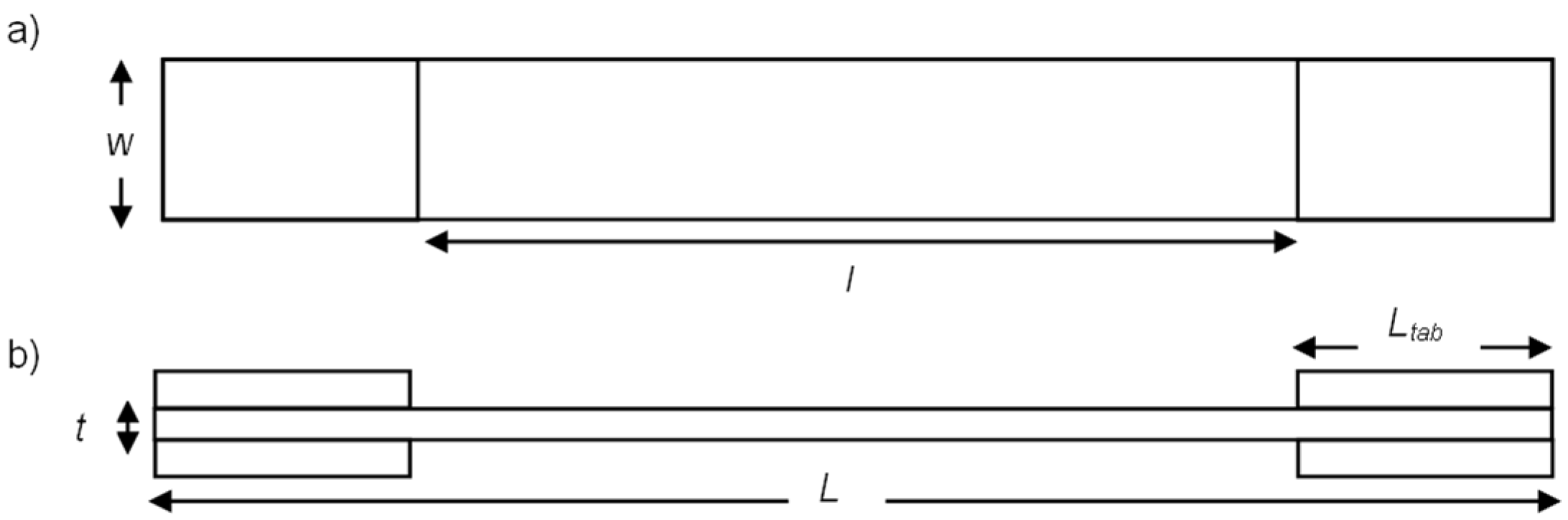
Main geometric parameters of the specimen according to ASTM D3039: (a) top view and (b) front view.
Figure 4.
Main geometric parameters of the specimen according to ASTM D3039: (a) top view and (b) front view.
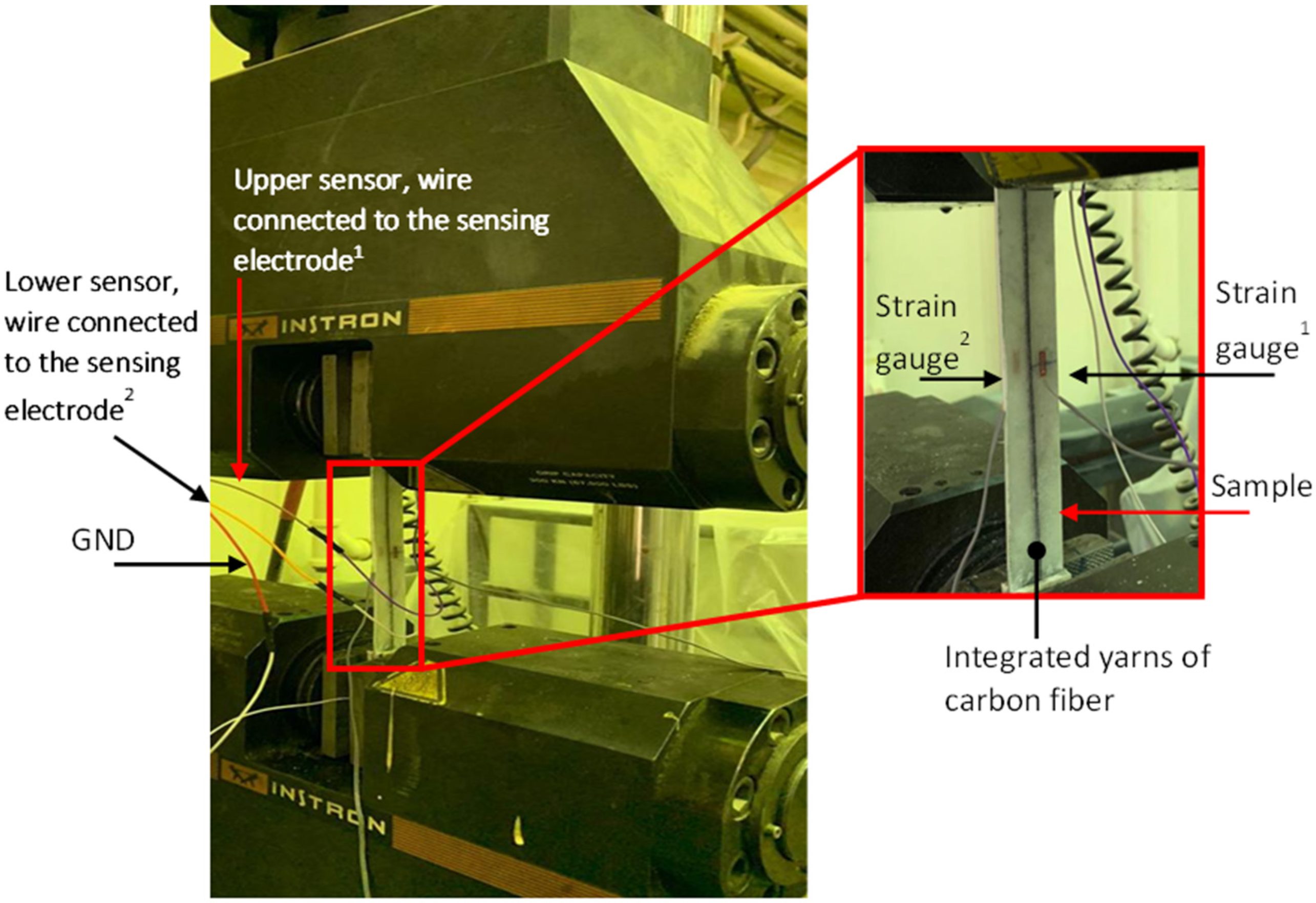
Figure 5.
An image of the experimental setup used for the mechanical test on an Instron test machine (67500LBS). They represent the order number e.g., Strain guage1 and Strain guage2, also Upper sensor electrode1 and Lower electrode2.
Figure 5.
An image of the experimental setup used for the mechanical test on an Instron test machine (67500LBS). They represent the order number e.g., Strain guage1 and Strain guage2, also Upper sensor electrode1 and Lower electrode2.
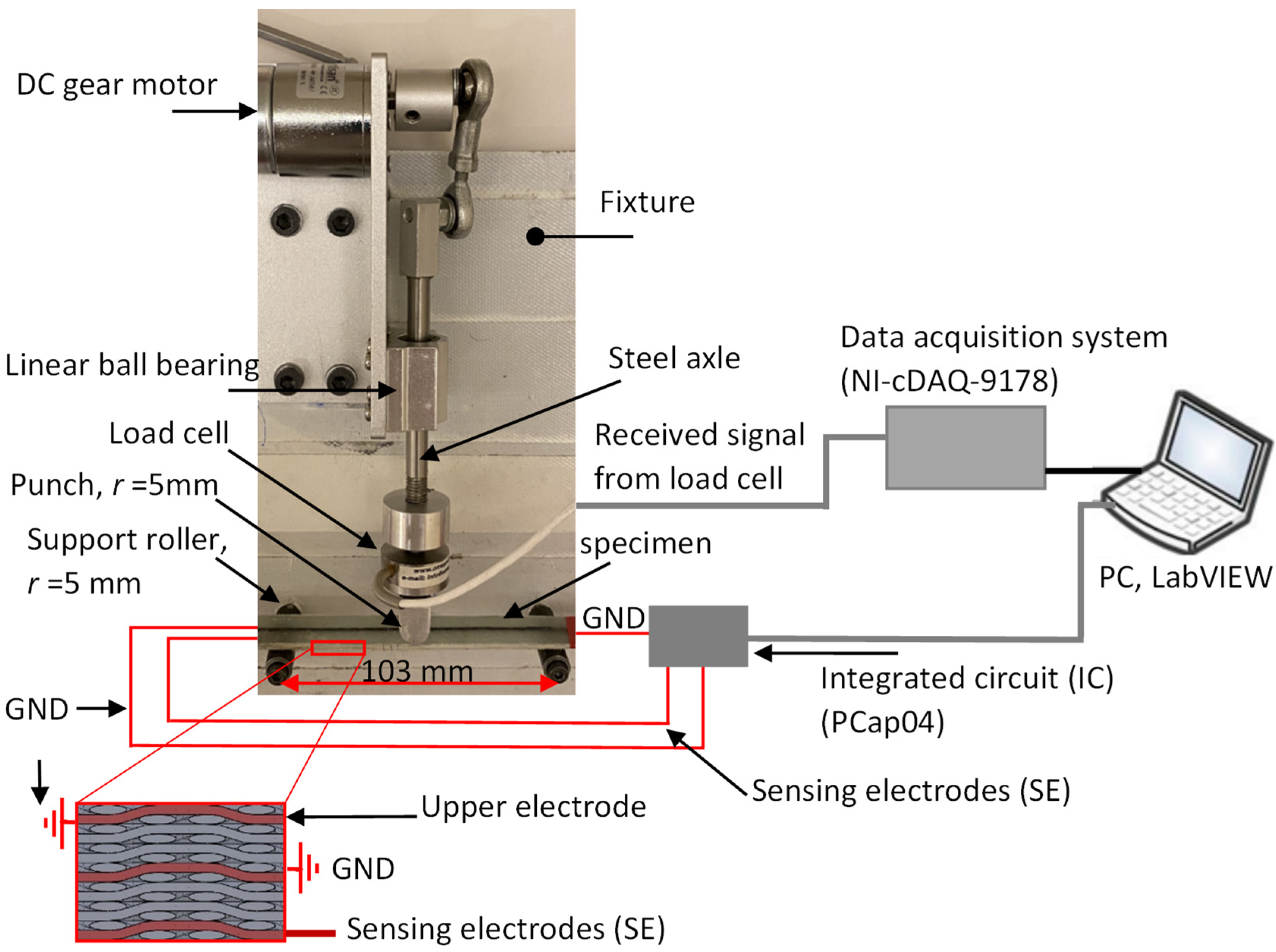
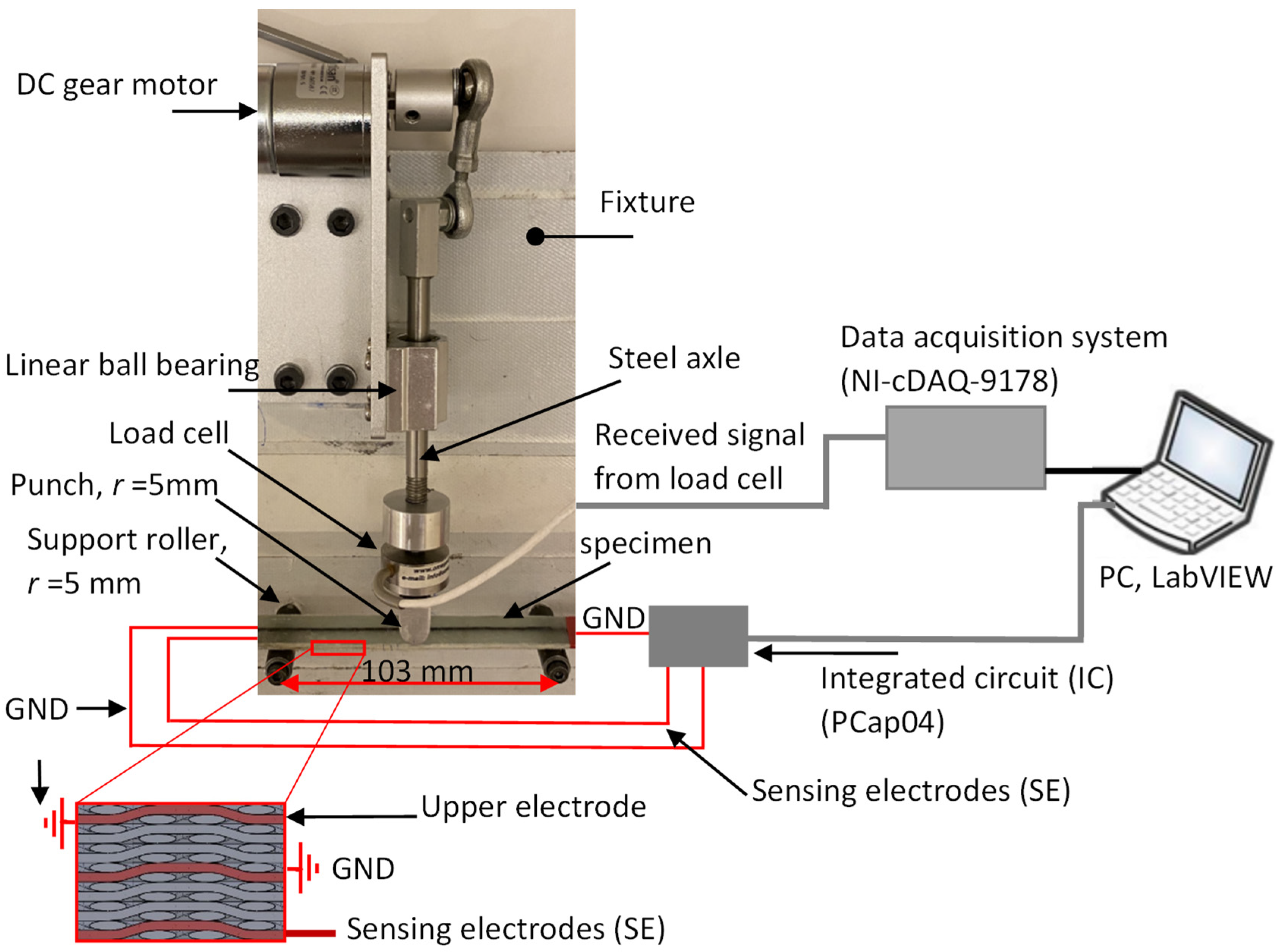
Figure 6.
Configuration and experimental setup of the cyclic three-point bending test.
Figure 6.
Configuration and experimental setup of the cyclic three-point bending test.
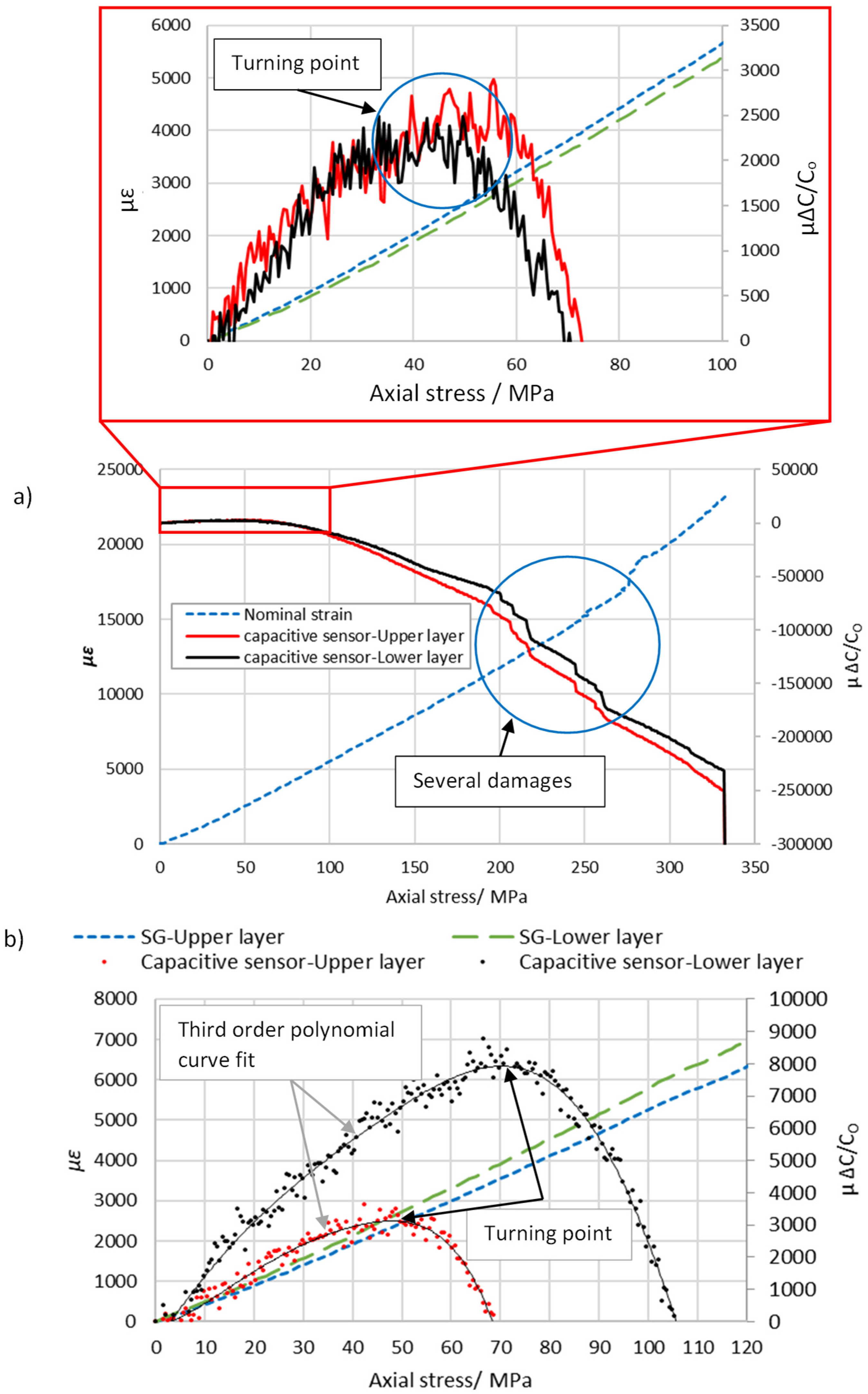
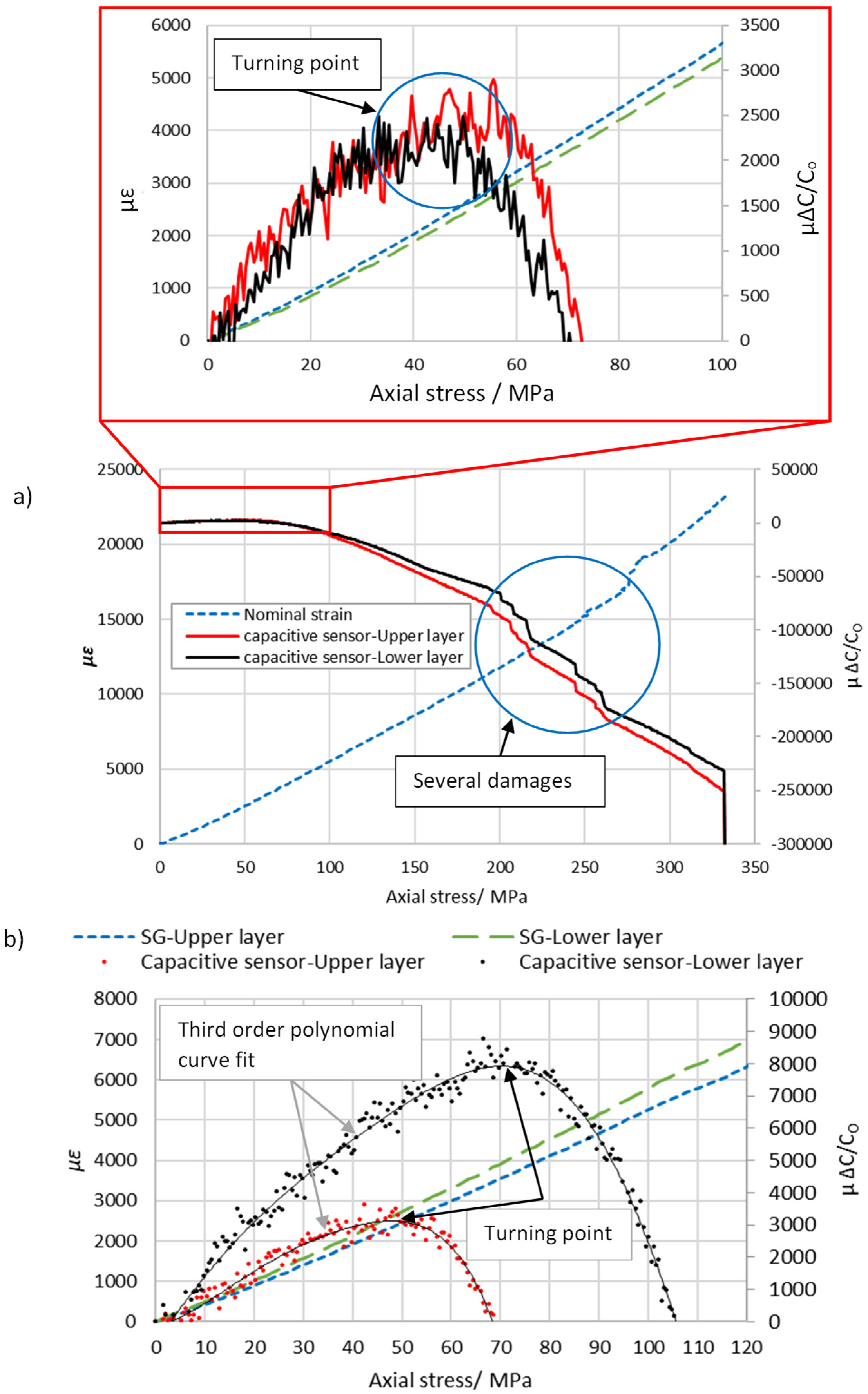
Figure 7.
Graph of relative change in capacitance and nominal strain against the axial stress for the type A configuration, (a) sample A−1 pulled to breaking point; and the inset in graph (a) shows an enlarged view where the ranges of the x- and y-axes were limited to 100 MPa and 6000 µɛ. (b) Experimental result for sample A−2 where ranges of the x- and y-axes were limited to 120 MPa and 8000 µɛ.
Figure 7.
Graph of relative change in capacitance and nominal strain against the axial stress for the type A configuration, (a) sample A−1 pulled to breaking point; and the inset in graph (a) shows an enlarged view where the ranges of the x- and y-axes were limited to 100 MPa and 6000 µɛ. (b) Experimental result for sample A−2 where ranges of the x- and y-axes were limited to 120 MPa and 8000 µɛ.
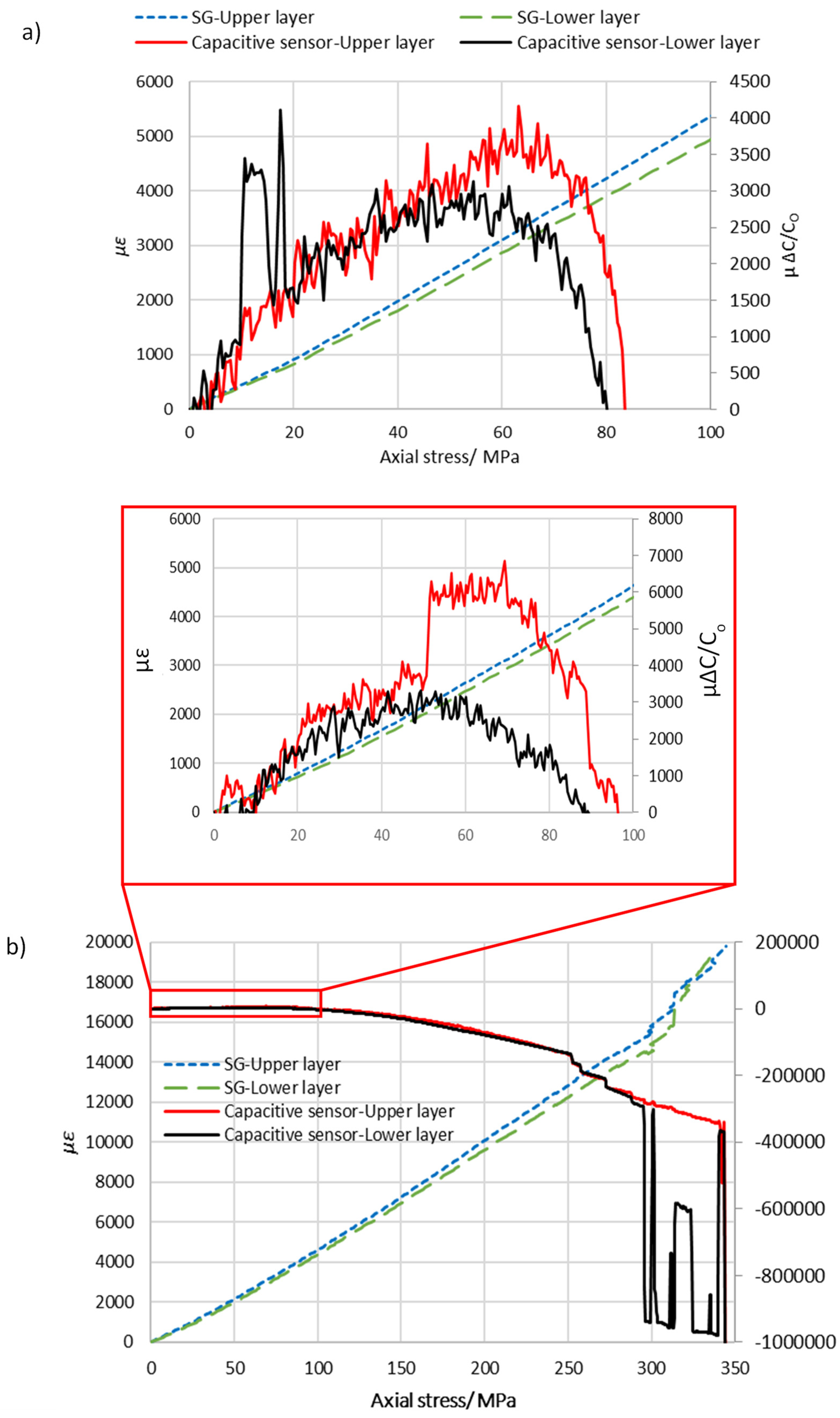
Figure 8.
A plot of relative change in capacitance and nominal strain against the axial stress for the type-B configuration. Graph (a) shows the experimental results for sample B-1, where ranges of the x- and y-axes were limited to 100 MPa and 6000 µɛ. (b) The result shows sample B-2 pulled to breaking point and the inset in graph (b) shows an enlarged view where the ranges of the x- and y-axes were limited to 100 MPa and 6000 µɛ.
Figure 8.
A plot of relative change in capacitance and nominal strain against the axial stress for the type-B configuration. Graph (a) shows the experimental results for sample B-1, where ranges of the x- and y-axes were limited to 100 MPa and 6000 µɛ. (b) The result shows sample B-2 pulled to breaking point and the inset in graph (b) shows an enlarged view where the ranges of the x- and y-axes were limited to 100 MPa and 6000 µɛ.
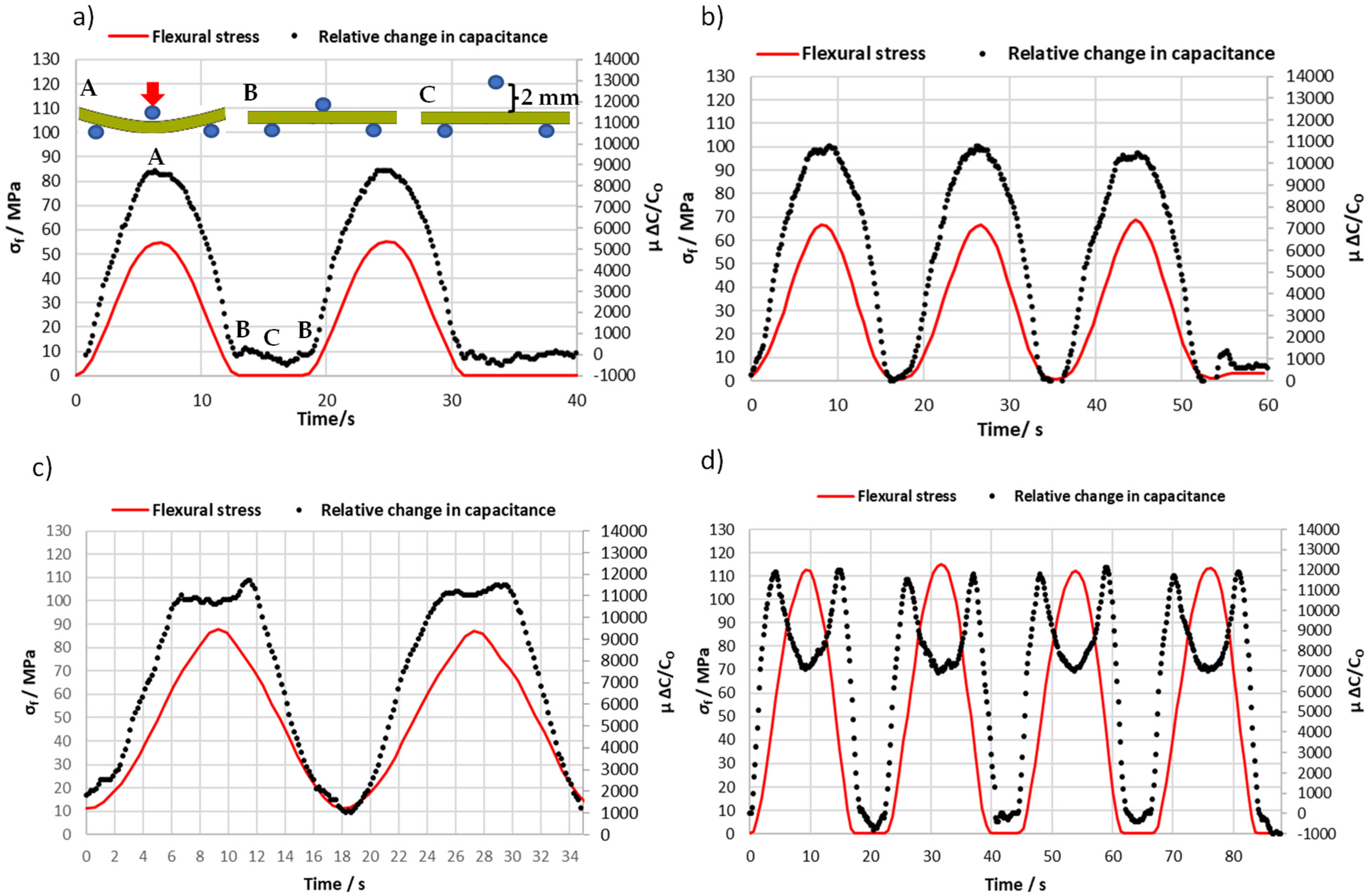
Figure 9.
Time history of flexural stress and relative change in capacitance under variable amplitude loading: (
a) 53.5 MPa where A, B and C describe the status of sample during the cyclic flexural test (refer to the experimental set-up in
Figure 6), (
b) 65.4 MPa; (
c) the sample was initially loaded of 11 MPa up to 86 MPa, and (
d) the sample was loaded four times at 112.7 MPa.
Figure 9.
Time history of flexural stress and relative change in capacitance under variable amplitude loading: (
a) 53.5 MPa where A, B and C describe the status of sample during the cyclic flexural test (refer to the experimental set-up in
Figure 6), (
b) 65.4 MPa; (
c) the sample was initially loaded of 11 MPa up to 86 MPa, and (
d) the sample was loaded four times at 112.7 MPa.
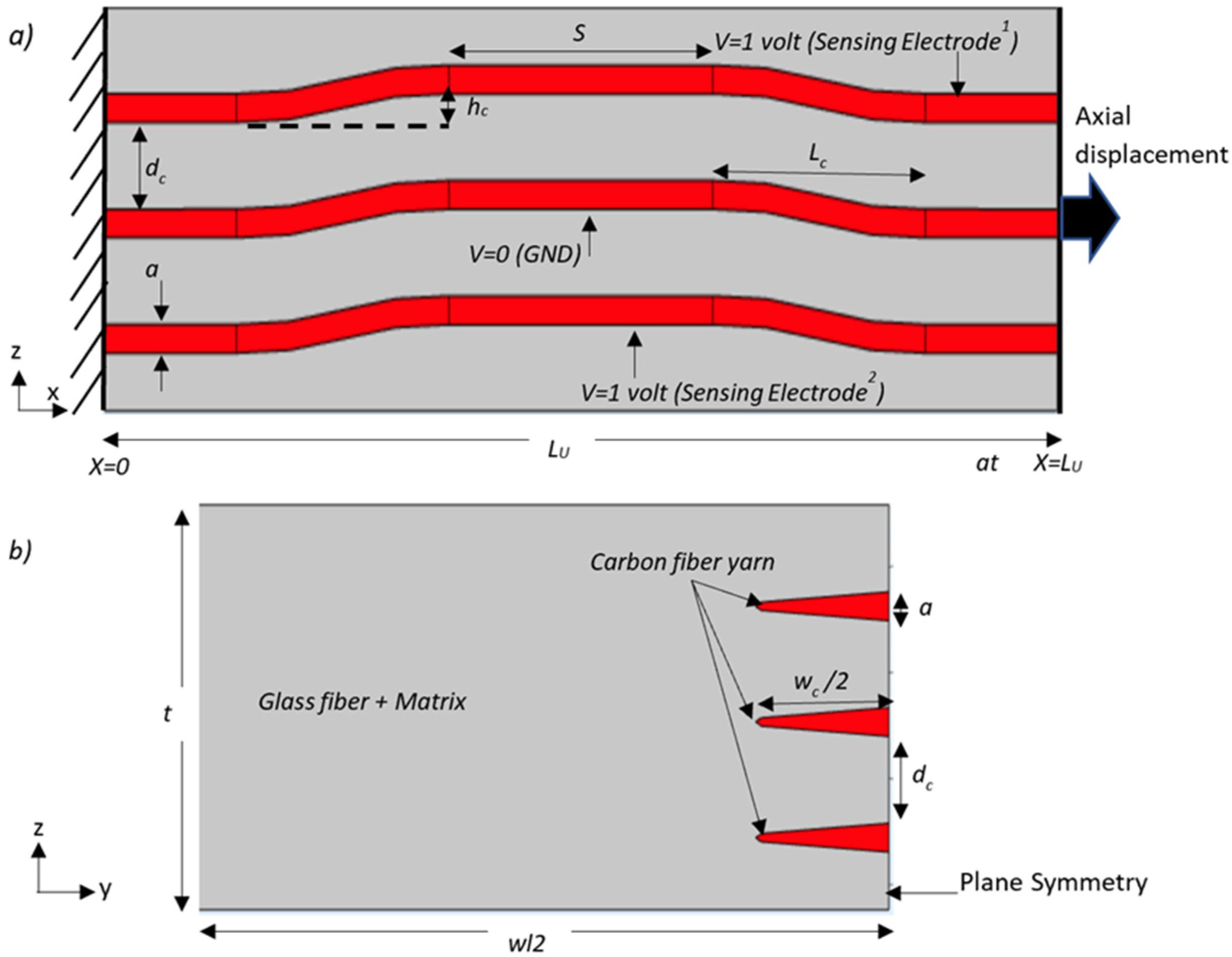
Figure 10.
The unit cell’s main geometric parameters for integrating carbon yarn into the epoxy impregnated 2/2 twill weave glass fabric. Schematic cross-sectional diagram of (a) the front view and (b) side view of the unit cell.
Figure 10.
The unit cell’s main geometric parameters for integrating carbon yarn into the epoxy impregnated 2/2 twill weave glass fabric. Schematic cross-sectional diagram of (a) the front view and (b) side view of the unit cell.
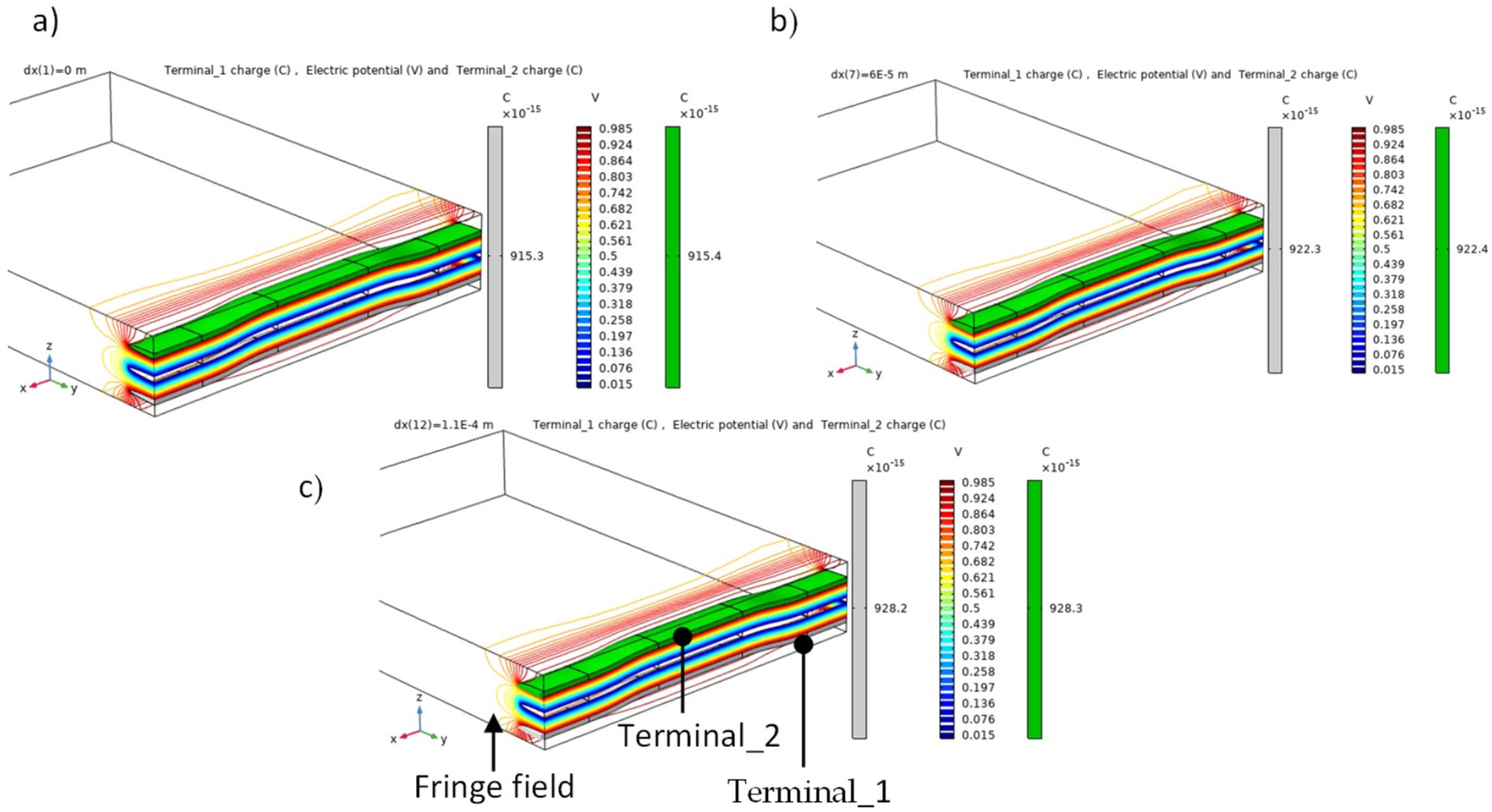
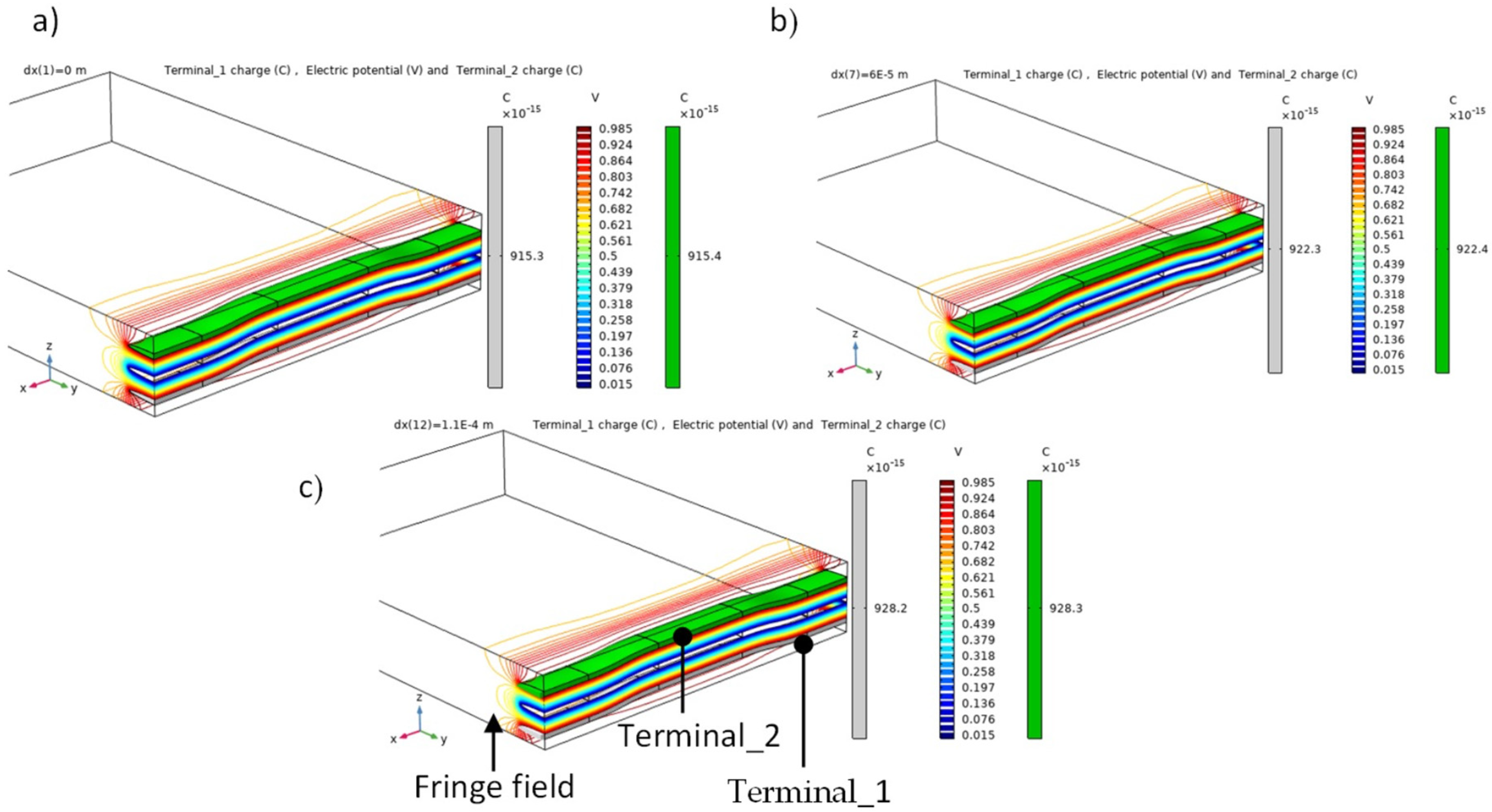
Figure 11.
Electric potential (V) contour shows the distribution through the thickness of the unit cell at (a) zero axial load where the initial capacitance for terminal_1 and tramnial_2 was 0.91 pF, (b) 60 µm axial tensile displacement and the predicated capacitance was 0.922 pF, and (c) 110 µm axial tensile displacement and the predicated capacitance was 0.928 pF. To obtain capacitance (C) using FEA, the electric charge (Q) was divided by the electric potential (V = 1 V).
Figure 11.
Electric potential (V) contour shows the distribution through the thickness of the unit cell at (a) zero axial load where the initial capacitance for terminal_1 and tramnial_2 was 0.91 pF, (b) 60 µm axial tensile displacement and the predicated capacitance was 0.922 pF, and (c) 110 µm axial tensile displacement and the predicated capacitance was 0.928 pF. To obtain capacitance (C) using FEA, the electric charge (Q) was divided by the electric potential (V = 1 V).
Figure 12.
Simulated axial stress and the relative change in capacitance against the nominal strain using FEM to obtain the effective elastic modulus (Ex) and gauge factor for the capacitive sensor.
Figure 12.
Simulated axial stress and the relative change in capacitance against the nominal strain using FEM to obtain the effective elastic modulus (Ex) and gauge factor for the capacitive sensor.
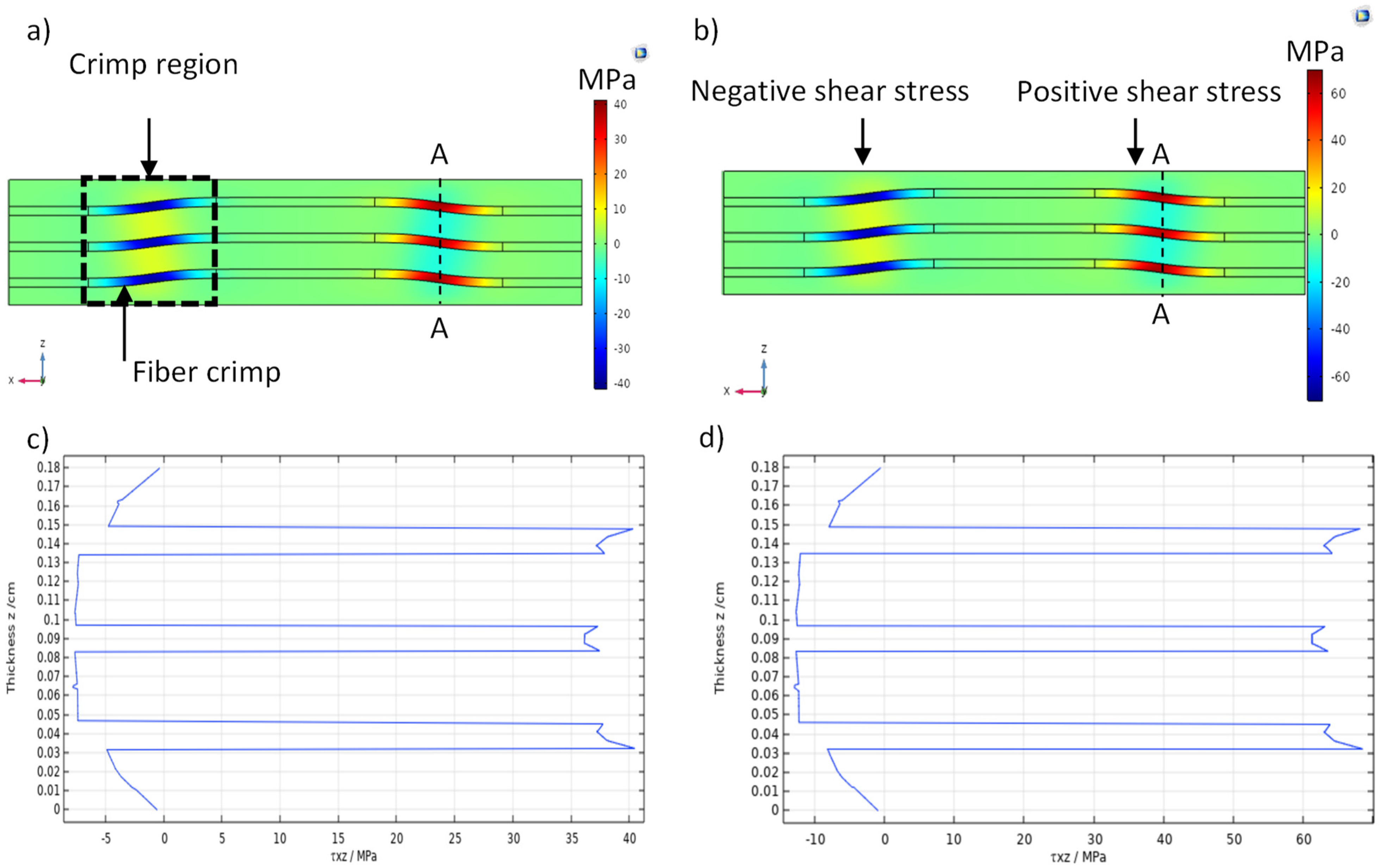
Figure 13.
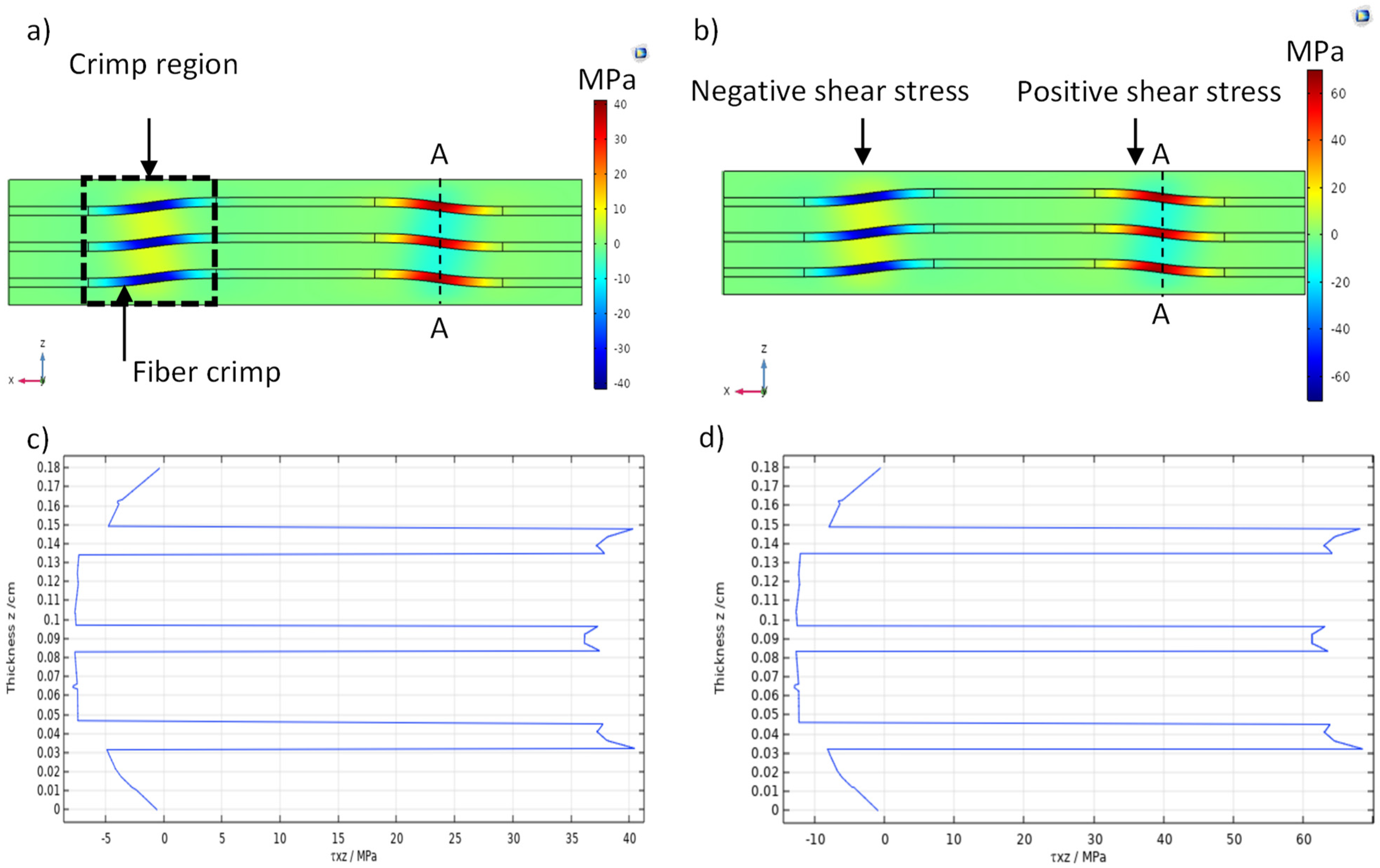
(a,b) Transverse stress contours (τxz) corresponding to the applied axial tensile strains of 1961 (µɛ) and 3305.7 (µɛ), respectively. (c,d) Graph of transverse shear stress (τxz) against the unit cell thickness (along section A−A) for 1961 µɛ and 3305.7 µɛ, respectively. A−A refers to transverse stress along the thickness FE model of the unit cell.
Figure 13.
(a,b) Transverse stress contours (τxz) corresponding to the applied axial tensile strains of 1961 (µɛ) and 3305.7 (µɛ), respectively. (c,d) Graph of transverse shear stress (τxz) against the unit cell thickness (along section A−A) for 1961 µɛ and 3305.7 µɛ, respectively. A−A refers to transverse stress along the thickness FE model of the unit cell.
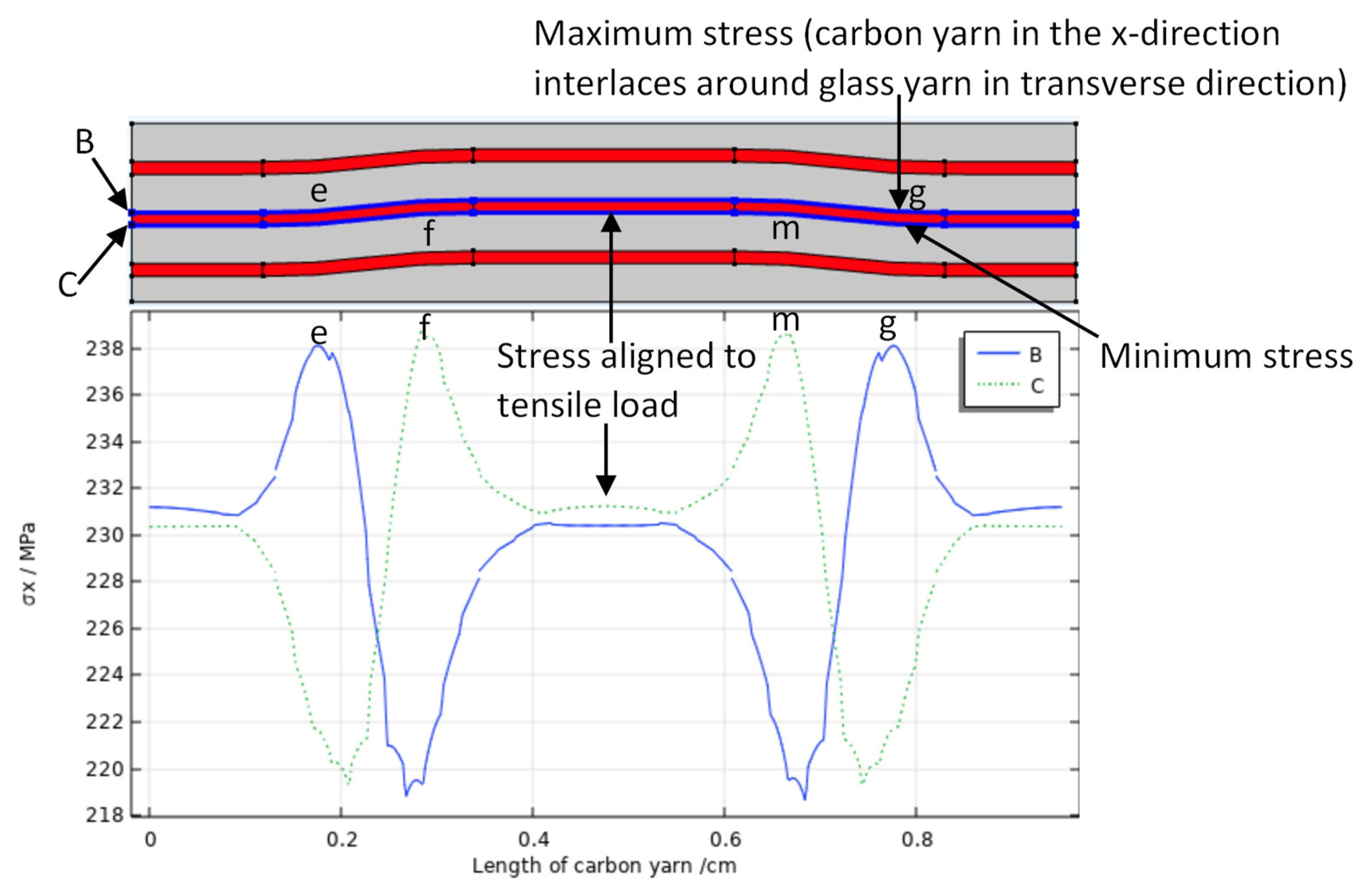
Figure 14.
The distribution of axial stress (σx) at the interface between the carbon yarn and the matrix for the applied tensile strain of 1961 µɛ. B and C refer to the axial stress along the length of carbon yarn for the upper and lower surface.
Figure 14.
The distribution of axial stress (σx) at the interface between the carbon yarn and the matrix for the applied tensile strain of 1961 µɛ. B and C refer to the axial stress along the length of carbon yarn for the upper and lower surface.
Table 1.
Electrical and mechanical properties. (*) Indicates properties value of the weft direction.
Table 1.
Electrical and mechanical properties. (*) Indicates properties value of the weft direction.
| Property | Carbon Fiber Filament T300 [26,27] | Interglas-92125 * [28,29] |
|---|
| Electric resistivity/Ω·cm | 1.7 × 10−3 | --- |
| Permittivity | 13.5 | 4.7 |
| Tensile Modulus/GPa | 230–238 | 18 |
| Tensile strength/MPa | 3530–3750 | 320 |
| Failure strain/% | 1.5–1.6 | 1.8 |
| Flexural modulus/GPa | --- | 24 |
| Flexural strength/MPa | --- | 460 |
Table 2.
Main dimensional parameters of the tensile test specimens where each specimen consisted of seven layers.
Table 2.
Main dimensional parameters of the tensile test specimens where each specimen consisted of seven layers.
| Sample Number | Thickness (t)/mm | Width (w)/mm | Length (L)/mm | Gauge Length (l)/mm |
|---|
| A-1 | 2.05 | 25.6 | 250 | 172 |
| A-2 | 1.75 | 26.1 | 250 | 172 |
| B-1 | 1.8 | 25.6 | 250 | 175 |
| B-2 | 1.73 | 26.3 | 250 | 176 |
Table 3.
Electrical and mechanical results obtained from the tensile tests for type-A and -B specimen configurations.
Table 3.
Electrical and mechanical results obtained from the tensile tests for type-A and -B specimen configurations.
| Sample Number | Ex/GPa | Initial Capacitance/pF | k (Gauge Factor) | Turning Point Characteristics |
|---|
| µɛ | |
|---|
| A-1 | U | 18.05 | 52.4 | 0.84 | 2519 | 2411.29 | 46.1741 |
| L | 58.5 | 0.95 | 2218 | 1960.09 | 40.8457 |
| A-2 | U | 19.5 | 49.5 | 1.33 | 3436 | 2243.92 | 45.3438 |
| L | 54.8 | 2.45 | 7848 | 3715.06 | 66.6773 |
| Average | 18.77 | 53.8 | 1.39 | 4005.2 | 2582.59 | 49.76 |
| B-1 | U | 20.9 | 65.6 | 1.191 | 4160 | 3305.70 | 62.999 |
| L | 67.6 | 1.098 | 2733 | 2454.58 | 51.4599 |
| B-2 | U | 20.9 | 80 | 1.484 | 5710.3 | 2846.33 | 64.5453 |
| L | 80.3 | 1.468 | 2894 | 1960.90 | 48.9629 |
| Average | 20.9 | 73.37 | 1.31 | 3874.5 | 2641.87 | 57 |
Table 4.
Electrical and mechanical results obtained from three-point bending test for type-B specimens. R* is the ratio of the maximum flexural stress to the flexural strength of GFRP (460 MPa).
Table 4.
Electrical and mechanical results obtained from three-point bending test for type-B specimens. R* is the ratio of the maximum flexural stress to the flexural strength of GFRP (460 MPa).
| Maximum Flexural Stress/MPa | Stress Ratio/R* | Approximated Deflection (δ)/mm | Loading Frequency/mHz | Turning Point Characteristics |
|---|
| Flexural Stress/MPa | |
|---|
| 53.5 | 12 | 2.9 | 82 | --- | --- |
| 65.4 | 14.5 | 3.5 | 54 | 63.7 | 10,450 |
| 86 | 19 | 4.6 | 54 | 69.1 | 10,950 |
| 112.7 | 24.5 | 6 | 60 | 57.8 | 11,550 |
Table 5.
The main parameters of the unit cell considered.
Table 5.
The main parameters of the unit cell considered.
| Material | Parameters |
|---|
| GFRP (Glass fiber + Matrix) | LU = 9.5 mm, w/2 = 12.5 mm, t = 1.799 mm |
| Carbon yarn | a = 0.1285 mm, wc/2 = 0.8 mm, dc = 0.3855 mm, s = 2.63 mm, hc = 0.1285 mm, Lc = 2.12 mm |
Table 6.
Material properties of the unit cell considered.
Table 6.
Material properties of the unit cell considered.
| Material | Elastic Modulus/GPa | Shear Modulus/GPa | Poisson’s Ratio | Effective Permittivity | Ref |
|---|
| | Ex (Weft) | Ey (Warp) | Ez | Gxy | Gyz | Gxz | vxy | vyz | vxz | | [-] |
|---|
| Interglass-92125 | 18 | 19 | 12 | 7.2 | 4 | 4 | 0.05 | 0.35 | 0.35 | 4.7 | [28,29,35] |
| Carbon yarn | 220 | 13.79 | 13.79 | 8.97 | 4.86 | 8.97 | 0.2 | 0.25 | 0.2 | 13.5 | [29,36] |
Table 7.
Comparison of the measured and the finite element predicted effective elastic modulus and gauge factor.
Table 7.
Comparison of the measured and the finite element predicted effective elastic modulus and gauge factor.
| Item | Experiment | COMSOL (FEA) | Error % |
|---|
| Effective elastic modulus, Ex | 20.9 GPa | 20.5 GPa | 2 |
| Gauge factor, | 1.31 | 1.217 | 7 |
Table 8.
Finite element stress predictions for the unit cell for 1961 (µɛ) and 3305 (µɛ).
Table 8.
Finite element stress predictions for the unit cell for 1961 (µɛ) and 3305 (µɛ).
| Strain (µɛ) | | Maximum Stress at Carbon Yarn/MPa |
|---|
| Transverse Normal Stress | Transverse Shear Stress |
|---|
| | τxz | τxy | τyz |
|---|
| 1961 | 39.6 | 453 | 6.5 | 6.0 | 43.5 | 2.3 | 2.5 |
| 3305.7 | 66.9 | 764 | 11 | 10.1 | 73.5 | 4.0 | 4.2 |









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}