
Smart License Plate in Combination with Fluorescent Concentrator for Vehicular Visible Light Communication System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Proposed Architecture
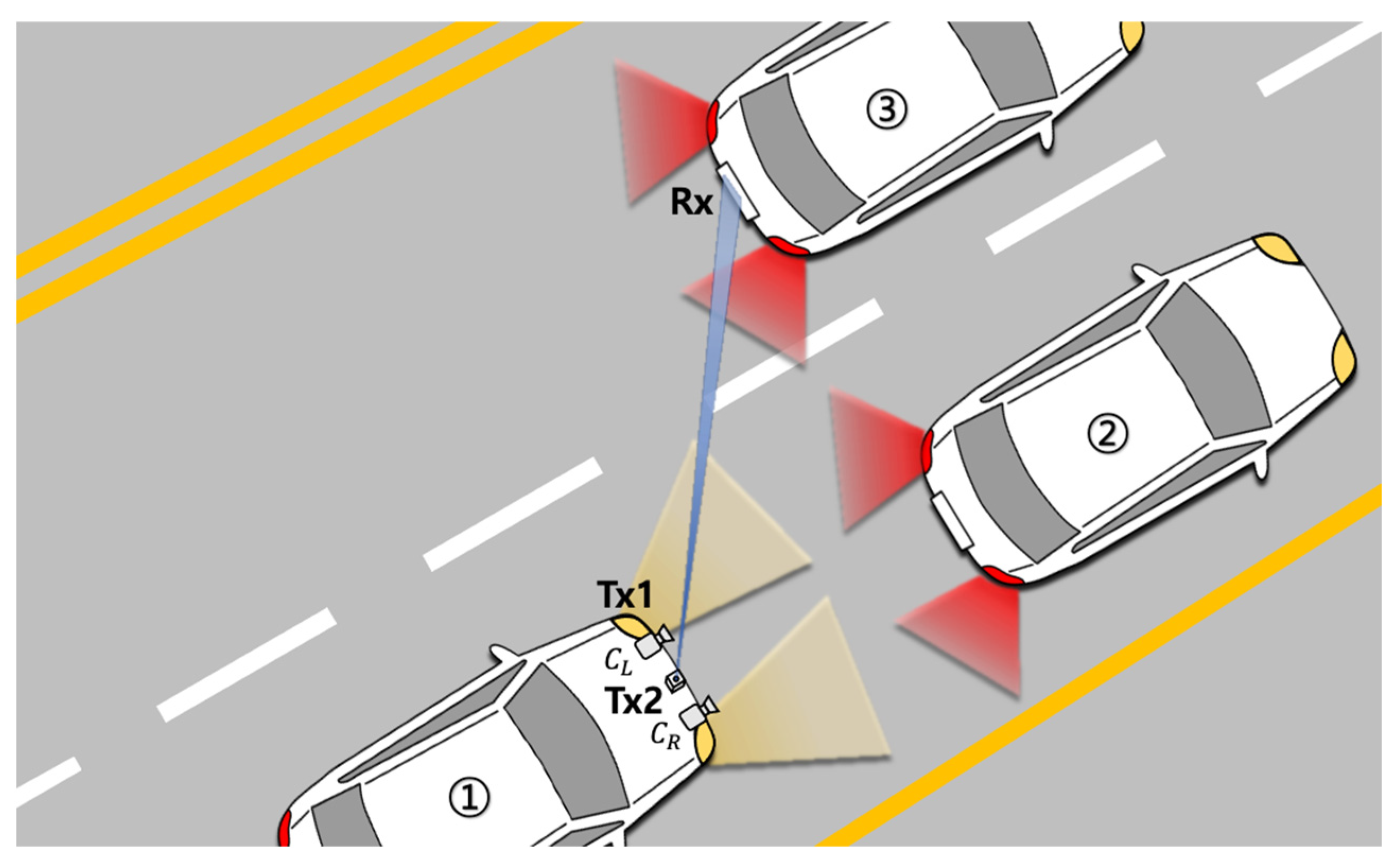
2.1. Proposed V2V-VLC System
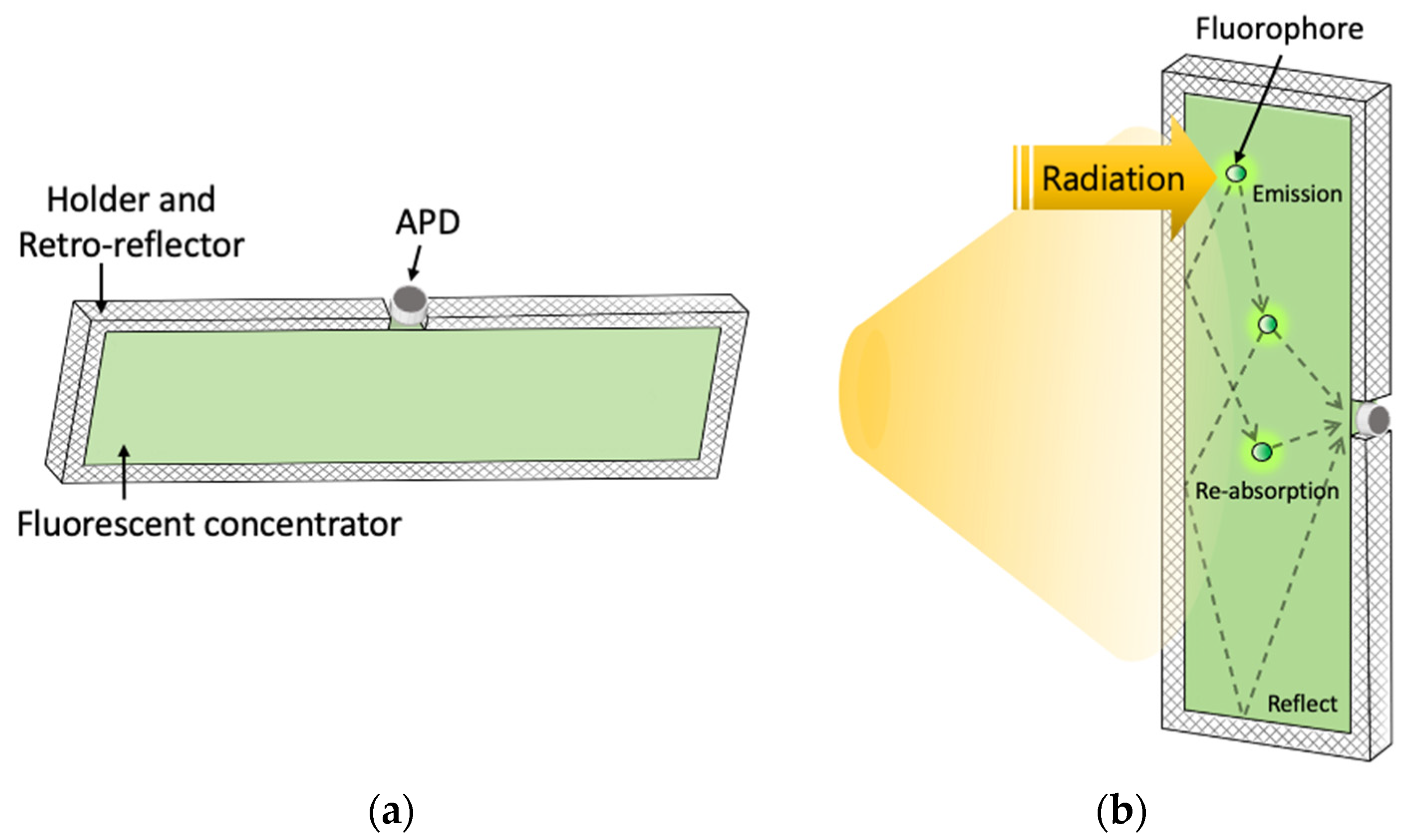
2.2. License Plate Incorporated with Fluorescent Concentrator
2.3. Proof-of-Concept Demonstration
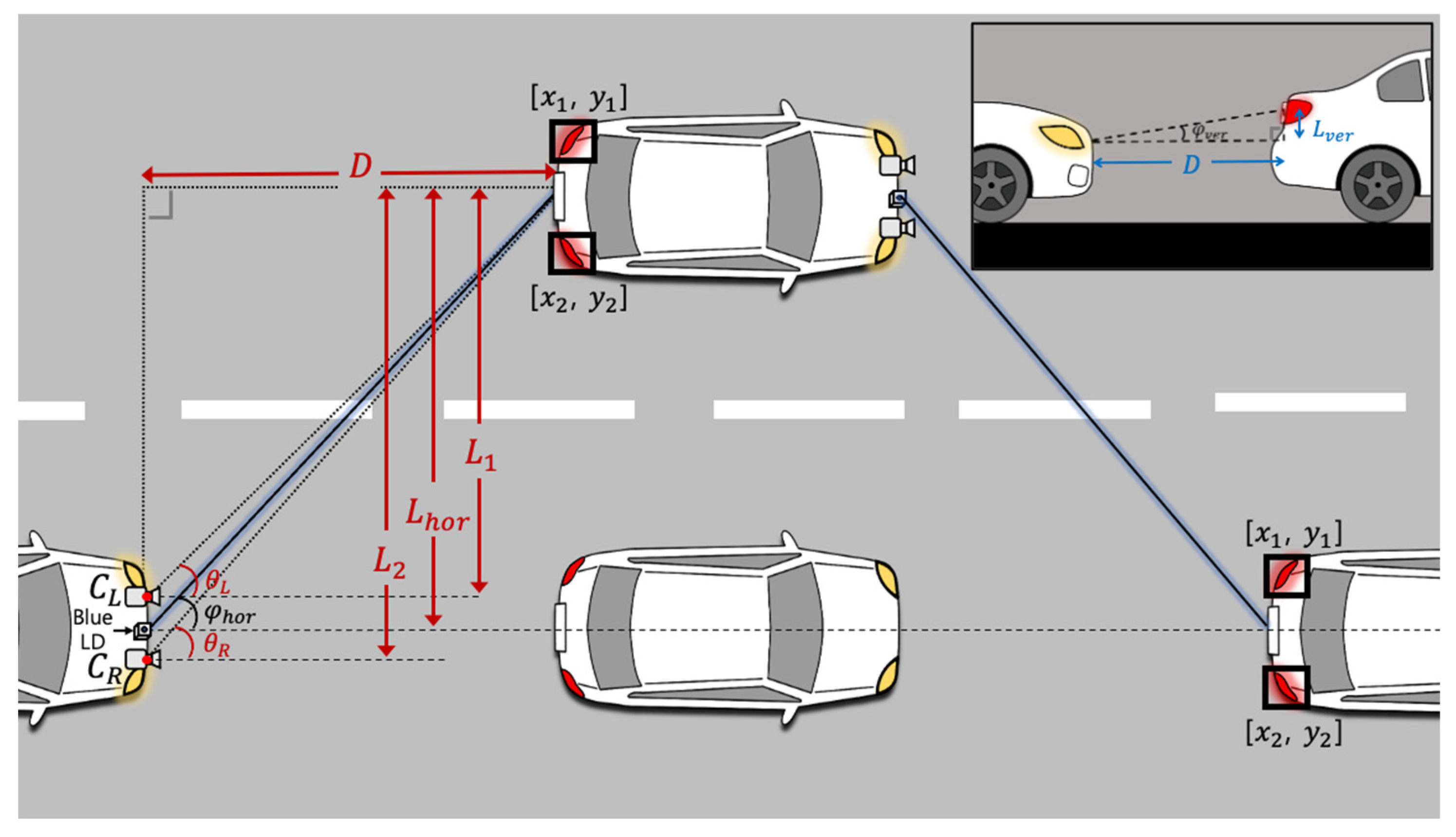
2.4. Beam-Steering Mechanism
3. Experiment Result
3.1. Analysis of Proposed FC-Coupled Number Plate
3.2. Communication Test
3.3. Demonstration of Real-Time Video Transmission
4. Discussions and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, K.; Koo, S.; Choi, J.W. Analysis on Path Rerouting Algorithm based on V2X Communication for Traffic Flow Improvement. In Proceedings of the 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 21–23 October 2020. [Google Scholar]
- Lee, S.; Jung, Y.; Park, Y.H.; Kim, S.W. Design of V2X-Based Vehicular Contents Centric Networks for Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Kim, T.; Park, Y.; Kim, H.; Hong, D. Cooperative Superposed Transmission in Cellular-Based V2V Systems. IEEE Trans. Veh. Technol. 2019, 68, 11888–11901. [Google Scholar] [CrossRef]
- Navas, F.; Milanés, V. Mixing V2V- and non-V2V-equipped vehicles in car following. Transp. Res. Part C Emerg. Technol. 2019, 108, 167–181. [Google Scholar] [CrossRef]
- Ni, Y.; Li, X.; Zhao, H.; Yang, J.; Xia, W.; Gui, G. An effective hybrid V2V/V2I transmission latency method based on LSTM neural network. Phys. Commun. 2022, 51, 101562. [Google Scholar] [CrossRef]
- Luo, P.; Ghassemlooy, Z.; Le Minh, H.; Bentley, E.; Burton, A.; Tang, X. Performance analysis of a car-to-car visible light communication system. Appl. Opt. 2015, 54, 1696–1706. [Google Scholar] [CrossRef]
- Kim, Y.H.; Cahyadi, W.A.; Chung, Y.H. Experimental Demonstration of VLC-Based Vehicle-to-Vehicle Communications under Fog Conditions. IEEE Photonics J. 2015, 7, 1–9. [Google Scholar] [CrossRef]
- Nawaz, T.; Seminara, M.; Caputo, S.; Mucchi, L.; Catani, J. Low-Latency VLC System with Fresnel Receiver for I2V ITS Applications. J. Sens. Actuator Netw. 2020, 9, 35. [Google Scholar] [CrossRef]
- Illanko, K.; Fernando, X. Adaptive Minimization of Direct Sunlight Noise on V2V-VLC Receivers. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–6. [Google Scholar]
- Ali, W.; Manousiadis, P.; O’Brien, D.C.; Turnbull, G.; Samuel, I.; Collins, S. A Gigabit VLC receiver that incorporates a fluorescent antenna and a SiPM. J. Lightwave Technol. 2021. [Google Scholar] [CrossRef]
- Manousiadis, P.P.; Rajbhandari, S.; Mulyawan, R.; Vithanage, D.A.; Chun, H.; Faulkner, G.; O’Brien, D.C.; Turnbull, G.A.; Collins, S.; Samuel, I.D. Wide field-of-view fluorescent antenna for visible light communications beyond the Étendue limit. Optica 2016, 3, 702–706. [Google Scholar] [CrossRef]
- Brambilla, M.; Tagliaferri, D.; Nicoli, M.; Spagnolini, U. Sensor and map-aided cooperative beam tracking for optical V2V communications. In Proceedings of the IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–7. [Google Scholar]
- Cho, S.; Lim, S.; Kim, K.; Lee, C.; Chun, H. Fluorescent reflector and image-processing-based D2D beam-steering system for V2V applications. Appl. Opt. 2021, 60, 7152–7157. [Google Scholar] [CrossRef] [PubMed]
- Cho, S.; Chun, H. Reflection based coupling efficiency enhancement in a fluorescent planar concentrator for an optical wireless receiver. Opt. Express 2021, 29, 28901–28911. [Google Scholar] [CrossRef] [PubMed]
- Sivak, M.; Flannagan, M.J.; Schoettle, B. A Market-Weighted Description of Low-Beam Headlighting Patterns in Europe; SAE Technical Paper; University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2001. [Google Scholar]
- Tsonev, D.; Chun, H.; Rajbhandari, S.; McKendry, J.J.; Videv, S.; Gu, E.; Haji, M.; Watson, S.; Kelly, A.E.; Faulkner, G.; et al. A 3-Gb/s Single-LED OFDM-Based Wireless VLC Link Using a Gallium Nitride μLED. IEEE Photonics Technol. Lett. 2014, 26, 637–640. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, S.; Lee, Y.; Yu, M.; Cho, S.; Javed, S.; Chun, H. Smart License Plate in Combination with Fluorescent Concentrator for Vehicular Visible Light Communication System. Sensors 2022, 22, 2485. https://doi.org/10.3390/s22072485
Oh S, Lee Y, Yu M, Cho S, Javed S, Chun H. Smart License Plate in Combination with Fluorescent Concentrator for Vehicular Visible Light Communication System. Sensors. 2022; 22(7):2485. https://doi.org/10.3390/s22072485
Chicago/Turabian StyleOh, Seoyeon, Yejin Lee, Minseok Yu, Seonghyeon Cho, Sana Javed, and Hyunchae Chun. 2022. "Smart License Plate in Combination with Fluorescent Concentrator for Vehicular Visible Light Communication System" Sensors 22, no. 7: 2485. https://doi.org/10.3390/s22072485
APA StyleOh, S., Lee, Y., Yu, M., Cho, S., Javed, S., & Chun, H. (2022). Smart License Plate in Combination with Fluorescent Concentrator for Vehicular Visible Light Communication System. Sensors, 22(7), 2485. https://doi.org/10.3390/s22072485