
Drone-Mountable Gas Sensing Platform Using Graphene Chemiresistors for Remote In-Field Monitoring



Abstract
:
1. Introduction
2. Materials and Methods
3. Results and Discussion
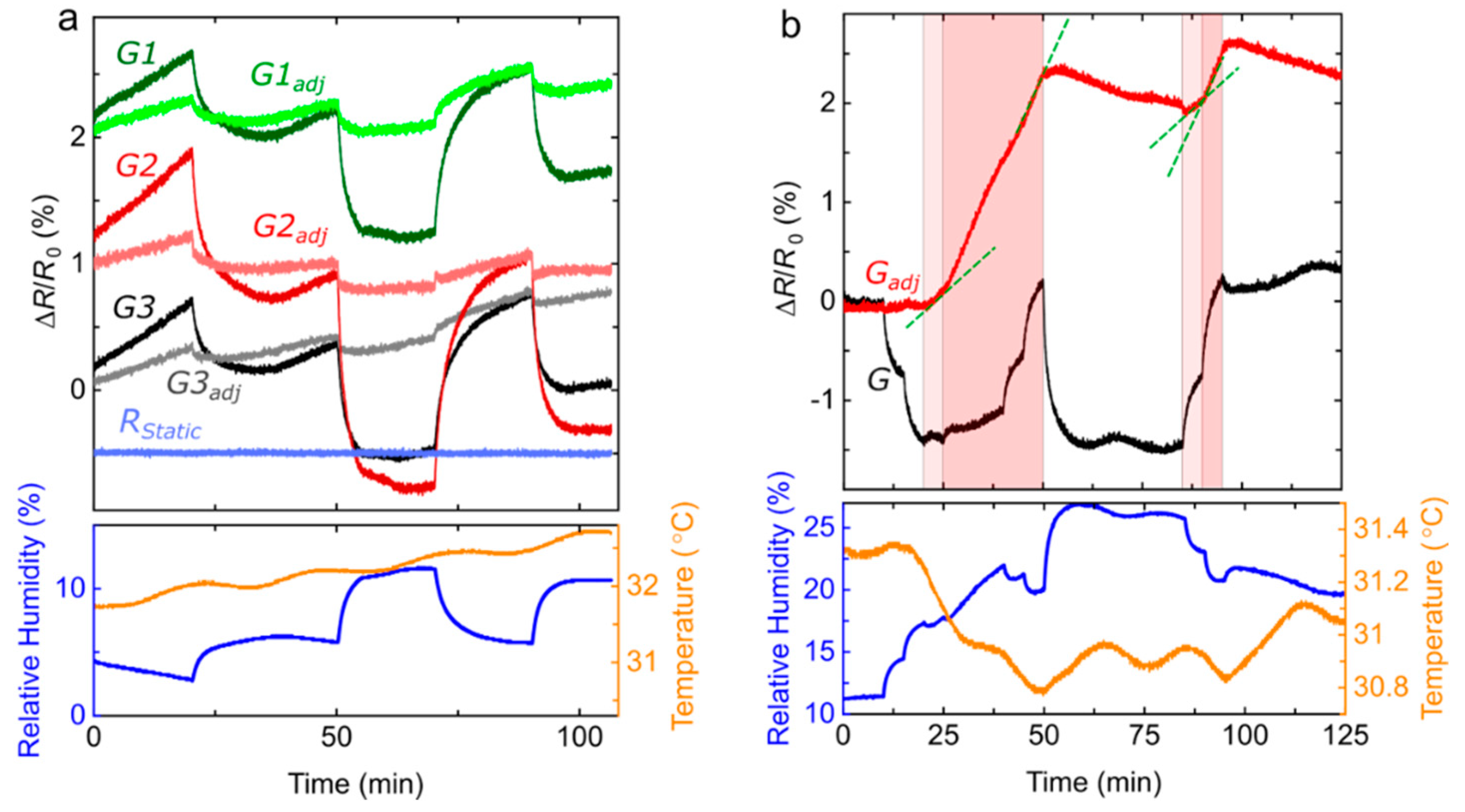
3.1. Tests in a Laboratory Setting
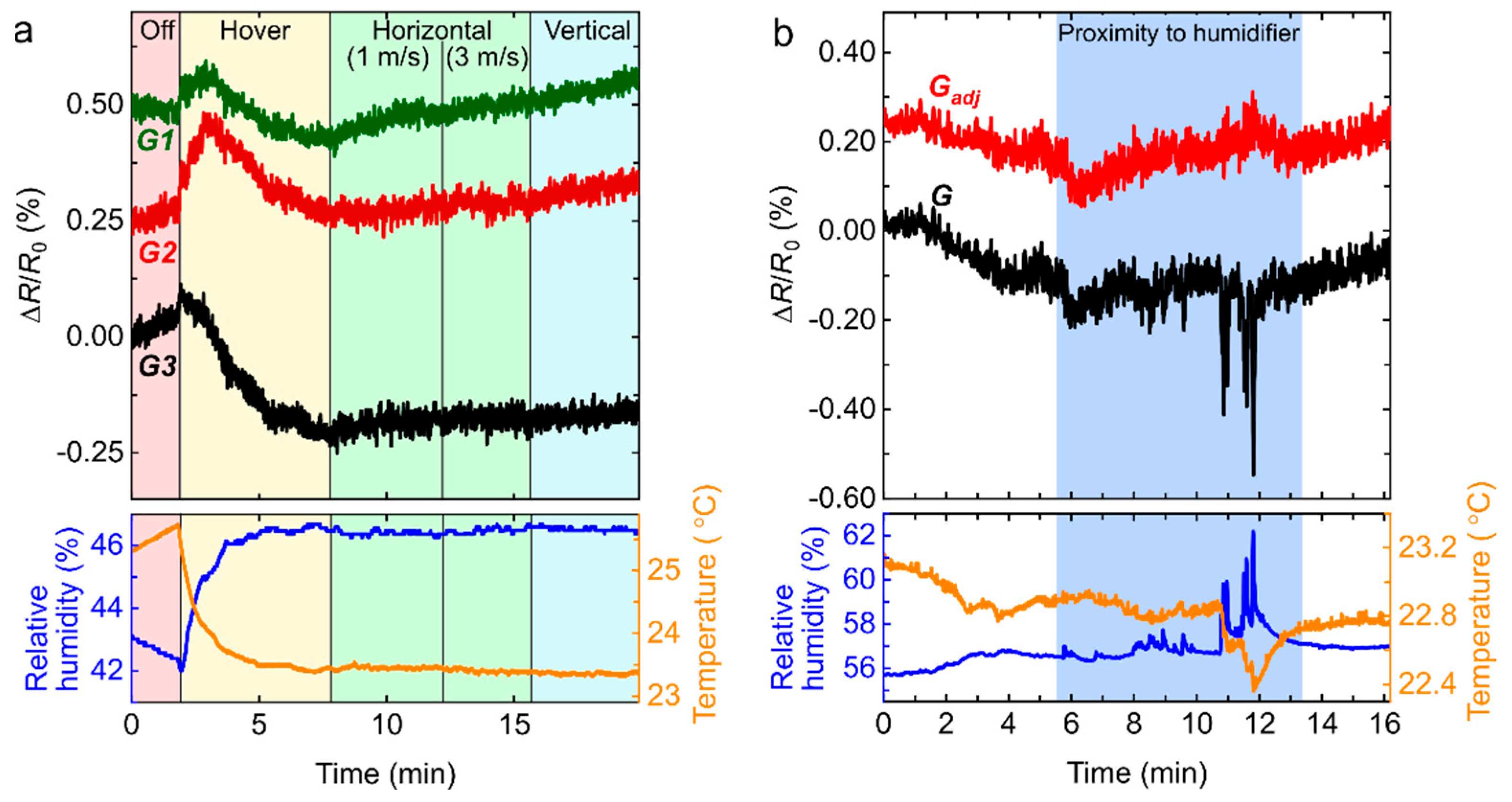
3.2. Indoor Flight Tests
3.3. Outdoor Tests
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, S.; Farha, F.; Li, Q.; Wan, Y.; Xu, Y.; Zhang, T.; Ning, H. Review on Smart Gas Sensing Technology. Sensors 2019, 19, 3760. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wilson, D.M.; Hoyt, S.; Janata, J.; Booksh, K.; Obando, L. Chemical Sensors for Portable, Handheld Field Instruments. IEEE Sens. J. 2001, 1, 256–274. [Google Scholar] [CrossRef]
- Ollé, E.P.; Farré-Lladós, J.; Casals-Terré, J. Advancements in Microfabricated Gas Sensors and Microanalytical Tools for the Sensitive and Selective Detection of Odors. Sensors 2020, 20, 5478. [Google Scholar] [CrossRef]
- Vargas Medina, D.A.; Maciel, E.V.S.; Lanças, F.M. Miniaturization of Liquid Chromatography Coupled to Mass Spectrometry. 3. Achievements on Chip-Based LC–MS Devices. TrAC Trends Anal. Chem. 2020, 131, 116003. [Google Scholar] [CrossRef]
- Holland, P.M.; Chutjian, A.; Darrach, M.R.; Orient, O.J. Miniaturized GC/MS Instrumentation for in Situ Measurements: Micro Gas Chromatography Coupled with Miniature Quadrupole Array and Paul Ion Trap Mass Spectrometers. In Proceedings of the First Jet Propulsion Laboratory In Situ Instruments Workshop, Bellingham, Passadena, CA, USA, 11–13 June 2002. [Google Scholar]
- Kolakowski, B.M.; Mester, Z. Review of Applications of High-Field Asymmetric Waveform Ion Mobility Spectrometry (FAIMS) and Differential Mobility Spectrometry (DMS). Analyst 2007, 132, 842–864. [Google Scholar] [CrossRef]
- Kafle, G.K.; Khot, L.R.; Sankaran, S.; Bahlol, H.Y.; Tufariello, J.A.; Hill, H.H. State of Ion Mobility Spectrometry and Applications in Agriculture: A Review. Eng. Agric. Environ. Food 2016, 9, 346–357. [Google Scholar] [CrossRef]
- Li, L.; Wang, Y.; Chen, C.; Wang, X.; Luo, J. Comprehensive Theoretical Analysis and Experimental Exploration of Ultrafast Microchip-Based High-Field Asymmetric Ion Mobility Spectrometry (FAIMS) Technique. J. Mass Spectrom. 2015, 50, 792–801. [Google Scholar] [CrossRef]
- Buckley, D.J.; Black, N.C.G.; Castanon, E.G.; Melios, C.; Hardman, M.; Kazakova, O. Frontiers of Graphene and 2D Material-Based Gas Sensors for Environmental Monitoring. 2D Mater. 2020, 7, 032002. [Google Scholar] [CrossRef]
- Alzate-Carvajal, N.; Park, J.; Pykal, M.; Lazar, P.; Rautela, R.; Scarfe, S.; Scarfe, L.; Ménard, J.-M.; Otyepka, M.; Luican-Mayer, A. Graphene Field Effect Transistors: A Sensitive Platform for Detecting Sarin. ACS Appl. Mater. Interfaces 2021, 13, 61751–61757. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Huang, D.; Yang, Z.; Xu, S.; He, G.; Li, X.; Hu, N.; Yin, G.; He, D.; Zhang, L. A Review on Graphene-Based Gas/Vapor Sensors with Unique Properties and Potential Applications. Nano-Micro Lett. 2016, 8, 95–119. [Google Scholar] [CrossRef] [Green Version]
- Demon, S.Z.N.; Kamisan, A.I.; Abdullah, N.; Noor, S.A.M.; Khim, O.K.; Kasim, N.A.M.; Yahya, M.Z.A.; Manaf, N.A.A.; Azmi, A.F.M.; Halim, N.A. Graphene-Based Materials in Gas Sensor Applications: A Review. Sens. Mater. 2020, 32, 759. [Google Scholar] [CrossRef] [Green Version]
- Akinwande, D.; Petrone, N.; Hone, J. Two-Dimensional Flexible Nanoelectronics. Nat. Commun. 2014, 5, 5678. [Google Scholar] [CrossRef] [PubMed]
- Bandodkar, A.J.; Jeerapan, I.; Wang, J. Wearable Chemical Sensors: Present Challenges and Future Prospects. ACS Sens. 2016, 1, 464–482. [Google Scholar] [CrossRef]
- Yang, S.; Jiang, C.; Wei, S. Gas Sensing in 2D Materials. Appl. Phys. Rev. 2017, 4, 021304. [Google Scholar] [CrossRef]
- Schedin, F.; Geim, A.K.; Morozov, S.V.; Hill, E.W.; Blake, P.; Katsnelson, M.I.; Novoselov, K.S. Detection of Individual Gas Molecules Adsorbed on Graphene. Nat. Mater. 2007, 6, 652–655. [Google Scholar] [CrossRef] [PubMed]
- Rautela, R.; Scarfe, S.; Guay, J.M.; Lazar, P.; Pykal, M.; Azimi, S.; Grenapin, C.; Boddison-Chouinard, J.; Halpin, A.; Wang, W.; et al. Mechanistic Insight into the Limiting Factors of Graphene-Based Environmental Sensors. ACS Appl. Mater. Interfaces 2020, 12, 39764–39771. [Google Scholar] [CrossRef]
- Bonaccorso, F.; Lombardo, A.; Hasan, T.; Sun, Z.; Colombo, L.; Ferrari, A.C. Production and Processing of Graphene and 2d Crystals. Mater. Today 2012, 15, 564–589. [Google Scholar] [CrossRef]
- Yan, J.; Guo, X.; Duan, S.; Jia, P.; Wang, L.; Peng, C.; Zhang, S. Electronic Nose Feature Extraction Methods: A Review. Sensors 2015, 15, 27804–27831. [Google Scholar] [CrossRef]
- Kitadai, H.; Yuan, M.; Ma, Y.; Ling, X. Graphene-Based Environmental Sensors: Electrical and Optical Devices. Molecules 2021, 26, 2165. [Google Scholar] [CrossRef]
- Christoe, M.J.; Han, J.; Kalantar-Zadeh, K. Telecommunications and Data Processing in Flexible Electronic Systems. Adv. Mater. Technol. 2020, 5, 1900733. [Google Scholar] [CrossRef]
- Arroyo, P.; Gómez-Suárez, J.; Suárez, J.I.; Lozano, J. Low-Cost Air Quality Measurement System Based on Electrochemical and PM Sensors with Cloud Connection. Sensors 2021, 21, 6228. [Google Scholar] [CrossRef] [PubMed]
- Macías Macías, M.; Enrique Agudo, J.; García Manso, A.; García Orellana, C.J.; González Velasco, H.M.; Gallardo Caballero, R. A Compact and Low Cost Electronic Nose for Aroma Detection. Sensors 2013, 13, 5528–5541. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sarjerao, B.S.; Prakasarao, A. A Low Cost Smart Pollution Measurement System Using REST API and ESP32. In Proceedings of the 2018 3rd International Conference for Convergence in Technology, I2CT, Pune, India, 6–8 April 2018. [Google Scholar]
- Prabowo, M.C.A.; Hidayat, S.S.; Luthfi, F. Low Cost Wireless Sensor Network for Smart Gas Metering Using Antares IoT Platform. In Proceedings of the International Conference on Applied Science and Technology (iCAST), Padang, Indonesia, 24 October 2020. [Google Scholar]
- Suh, J.H.; Cho, I.; Kang, K.; Kweon, S.J.; Lee, M.; Yoo, H.J.; Park, I. Fully Integrated and Portable Semiconductor-Type Multi-Gas Sensing Module for IoT Applications. Sens. Actuators B Chem. 2018, 265, 660–667. [Google Scholar] [CrossRef]
- Tanvir, N.B.; Yurchenko, O.; Laubender, E.; Urban, G. Investigation of Low Temperature Effects on Work Function Based CO2 Gas Sensing of Nanoparticulate CuO Films. Sens. Actuators B Chem. 2017, 247, 968–974. [Google Scholar] [CrossRef]
- Hayasaka, T.; Kubota, Y.; Liu, Y.; Lin, L. The Influences of Temperature, Humidity, and O2 on Electrical Properties of Graphene FETs. Sens. Actuators B Chem. 2019, 285, 116–122. [Google Scholar] [CrossRef]
- Quellmalz, A.; Smith, A.D.; Elgammal, K.; Fan, X.; Delin, A.; Östling, M.; Lemme, M.; Gylfason, K.B.; Niklaus, F. Influence of Humidity on Contact Resistance in Graphene Devices. ACS Appl. Mater. Interfaces 2018, 10, 41738–41746. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smith, A.D.; Elgammal, K.; Niklaus, F.; Delin, A.; Fischer, A.C.; Vaziri, S.; Forsberg, F.; Råsander, M.; Hugosson, H.; Bergqvist, L.; et al. Resistive Graphene Humidity Sensors with Rapid and Direct Electrical Readout. Nanoscale 2015, 7, 19099. [Google Scholar] [CrossRef] [Green Version]
- Popov, V.I.; Nikolaev, D.V.; Timofeev, V.B.; Smagulova, S.A.; Antonova, I.V. Graphene-Based Humidity Sensors: The Origin of Alternating Resistance Change. Nanotechnology 2017, 28, 355501. [Google Scholar] [CrossRef]
- Hossein-Babaei, F.; Ghafarinia, V. Compensation for the Drift-like Terms Caused by Environmental Fluctuations in the Responses of Chemoresistive Gas Sensors. Sens. Actuators B Chem. 2010, 143, 641–648. [Google Scholar] [CrossRef]
- Park, J.; Rautela, R.; Alzate-Carvajal, N.; Scarfe, S.; Scarfe, L.; Alarie, L.; Luican-Mayer, A.; Ménard, J.M. UV Illumination as a Method to Improve the Performance of Gas Sensors Based on Graphene Field-Effect Transistors. ACS Sens. 2021, 6, 4417–4424. [Google Scholar] [CrossRef]
- Smith, R.S.; Matthiesen, J.; Kay, B.D. Desorption Kinetics of Methanol, Ethanol, and Water from Graphene. J. Phys. Chem. A 2014, 118, 8242–8250. [Google Scholar] [CrossRef] [PubMed]
- Lopez, L.; Copa, V.; Hayasaka, T.; Faustino-Lopez, M.A.; Wu, Y.; Liu, H.; Liu, Y.; Estacio, E.; Somintac, A.; Lin, L.; et al. Influence of Chamber Design on the Gas Sensing Performance of Graphene Field-Effect-Transistor. SN Appl. Sci. 2020, 2, 1185. [Google Scholar] [CrossRef]
- Wu, J.; Tao, K.; Guo, Y.Y.; Li, Z.; Wang, X.T.; Luo, Z.Z.; Feng, S.L.; Du, C.L.; Chen, D.; Miao, J.M.; et al. A 3D Chemically Modified Graphene Hydrogel for Fast, Highly Sensitive, and Selective Gas Sensor. Adv. Sci. 2017, 4, 1600319. [Google Scholar] [CrossRef] [PubMed]
- Kulkarni, G.S.; Reddy, K.; Zhong, Z.; Fan, X. Graphene Nanoelectronic Heterodyne Sensor for Rapid and Sensitive Vapour Detection. Nat. Commun. 2014, 5, 4376. [Google Scholar] [CrossRef]
- Kim, J.S.; Lee, M.J.; Nam, H.; Do, S.; Lee, J.H.; Park, M.K.; Park, B.H. Indoor and Outdoor Tests for a Chemi-Capacitance Carbon Nanotube Sensor Installed on a Quadrotor Unmanned Aerial Vehicle for Dimethyl Methylphosphonate Detection and Mapping. ACS Omega 2021, 6, 16159–16164. [Google Scholar] [CrossRef] [PubMed]
- Do, S.; Lee, M.; Kim, J.S. The Effect of a Flow Field on Chemical Detection Performance of Quadrotor Drone. Sensors 2020, 20, 3262. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Qi, L.; Zhang, H.; Musiu, E.M.; Yang, Z.; Wang, P. Design of UAV Downwash Airflow Field Detection System Based on Strain Effect Principle. Sensors 2019, 19, 2630. [Google Scholar] [CrossRef] [Green Version]
- MacKin, C.; Palacios, T. Large-Scale Sensor Systems Based on Graphene Electrolyte-Gated Field-Effect Transistors. Analyst 2016, 141, 2704–2711. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a (×10−9) | b (×10−4) | c (×100) | |
|---|---|---|---|
| G1 | 4 | 1.5 | 2.8 |
| G2 | 7.5 | 1.6 | 2.85 |
| G3 | 4.9 | 1.65 | 2.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Jumu, F.; Power, J.; Richard, M.; Elsahli, Y.; Jarkas, M.A.; Ruan, A.; Luican-Mayer, A.; Ménard, J.-M. Drone-Mountable Gas Sensing Platform Using Graphene Chemiresistors for Remote In-Field Monitoring. Sensors 2022, 22, 2383. https://doi.org/10.3390/s22062383
Park J, Jumu F, Power J, Richard M, Elsahli Y, Jarkas MA, Ruan A, Luican-Mayer A, Ménard J-M. Drone-Mountable Gas Sensing Platform Using Graphene Chemiresistors for Remote In-Field Monitoring. Sensors. 2022; 22(6):2383. https://doi.org/10.3390/s22062383
Chicago/Turabian StylePark, Jaewoo, Franklyn Jumu, Justin Power, Maxime Richard, Yomna Elsahli, Mohamad Ali Jarkas, Andy Ruan, Adina Luican-Mayer, and Jean-Michel Ménard. 2022. "Drone-Mountable Gas Sensing Platform Using Graphene Chemiresistors for Remote In-Field Monitoring" Sensors 22, no. 6: 2383. https://doi.org/10.3390/s22062383
APA StylePark, J., Jumu, F., Power, J., Richard, M., Elsahli, Y., Jarkas, M. A., Ruan, A., Luican-Mayer, A., & Ménard, J.-M. (2022). Drone-Mountable Gas Sensing Platform Using Graphene Chemiresistors for Remote In-Field Monitoring. Sensors, 22(6), 2383. https://doi.org/10.3390/s22062383