
AIM5LA: A Latency-Aware Deep Reinforcement Learning-Based Autonomous Intersection Management System for 5G Communication Networks



Abstract
:1. Introduction
- (i)
- Taking into account the previous latencies of all AVs using a deep neural network based on a recurrent neural network to encode the latencies of the other AVs;
- (ii)
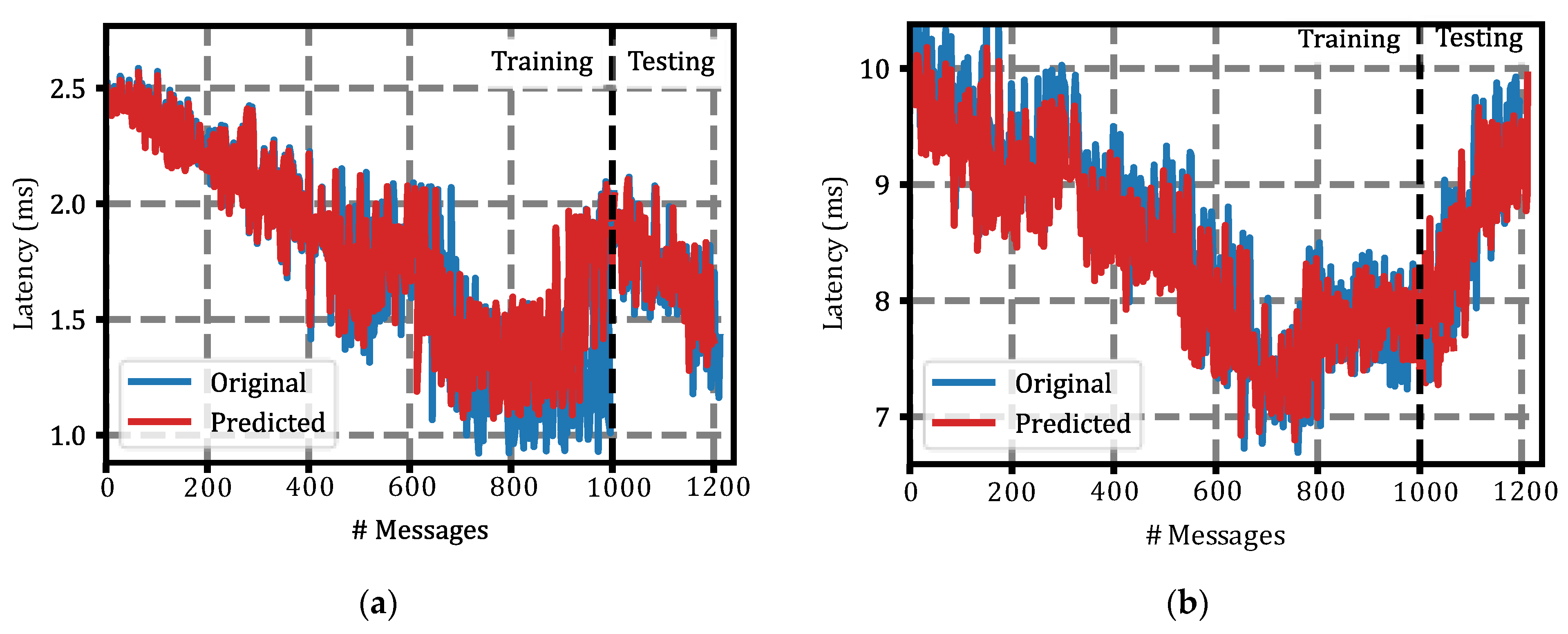
- Predicting the latency that each AV is going to experience in the next timestep, using a Transformer-based deep neural network, to adapt the control of the AVs;
- (iii)
- Consider the number of AVs to be controlled simultaneously as an internal parameter to adapt the control according to the number of AVs;
- (iv)
- Propose the set of messages as well as the communication protocol for AIM5LA implementation.
2. Related Works
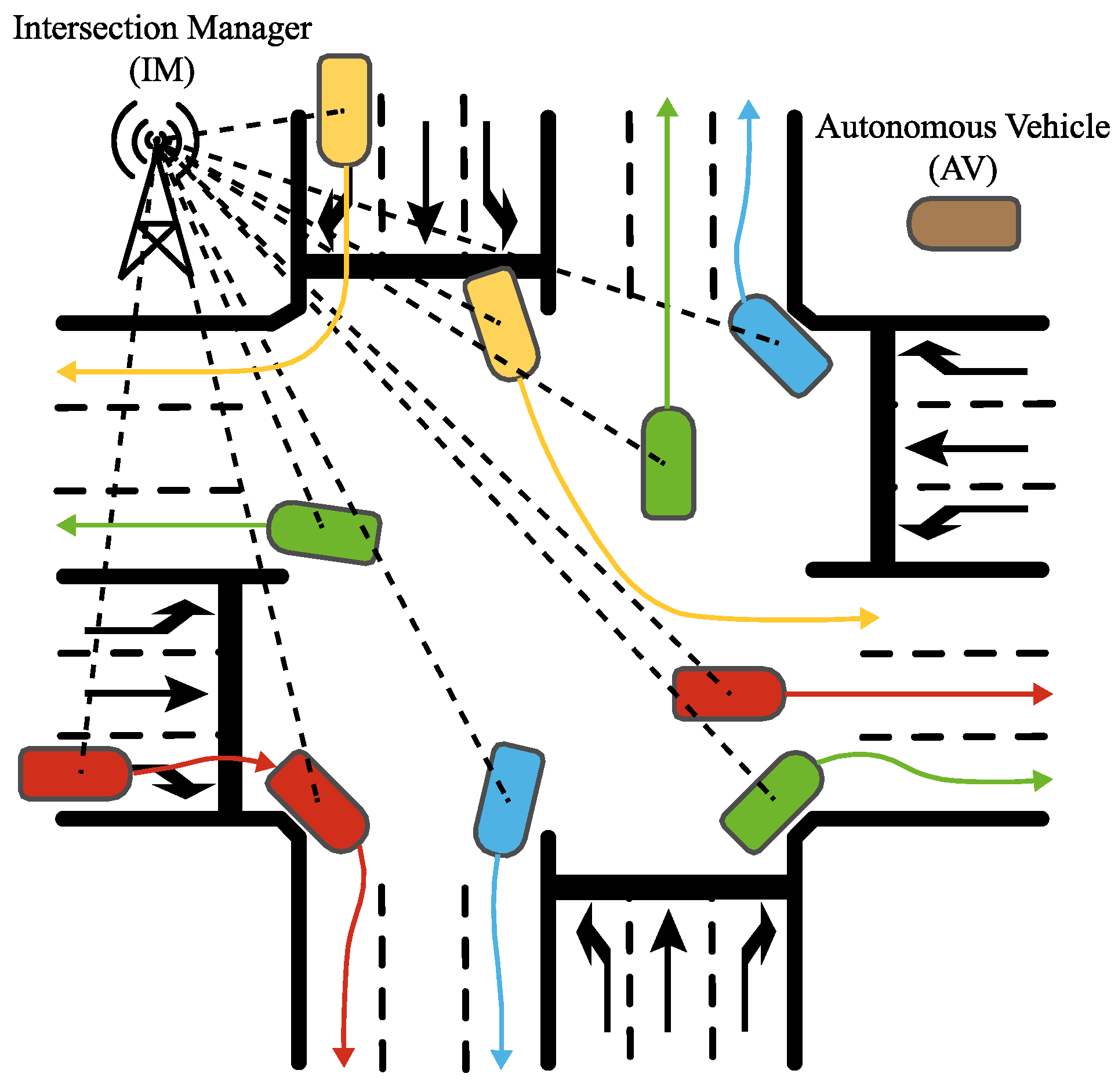
3. Our Proposal
- -
- Incorporates the previous latency experienced by the ego-vehicle to be controlled in the previous interval.
- -
- Includes a novel latency prediction module that predicts the latency experienced by the ego-vehicle during the next control interval, based on a Transformer deep neural network and the history of latencies experienced, as well as the number of AVs to be controlled simultaneously.
- -
- Considers the latency experienced by other AVs at the intersection using an encoder LSTM network.
- -
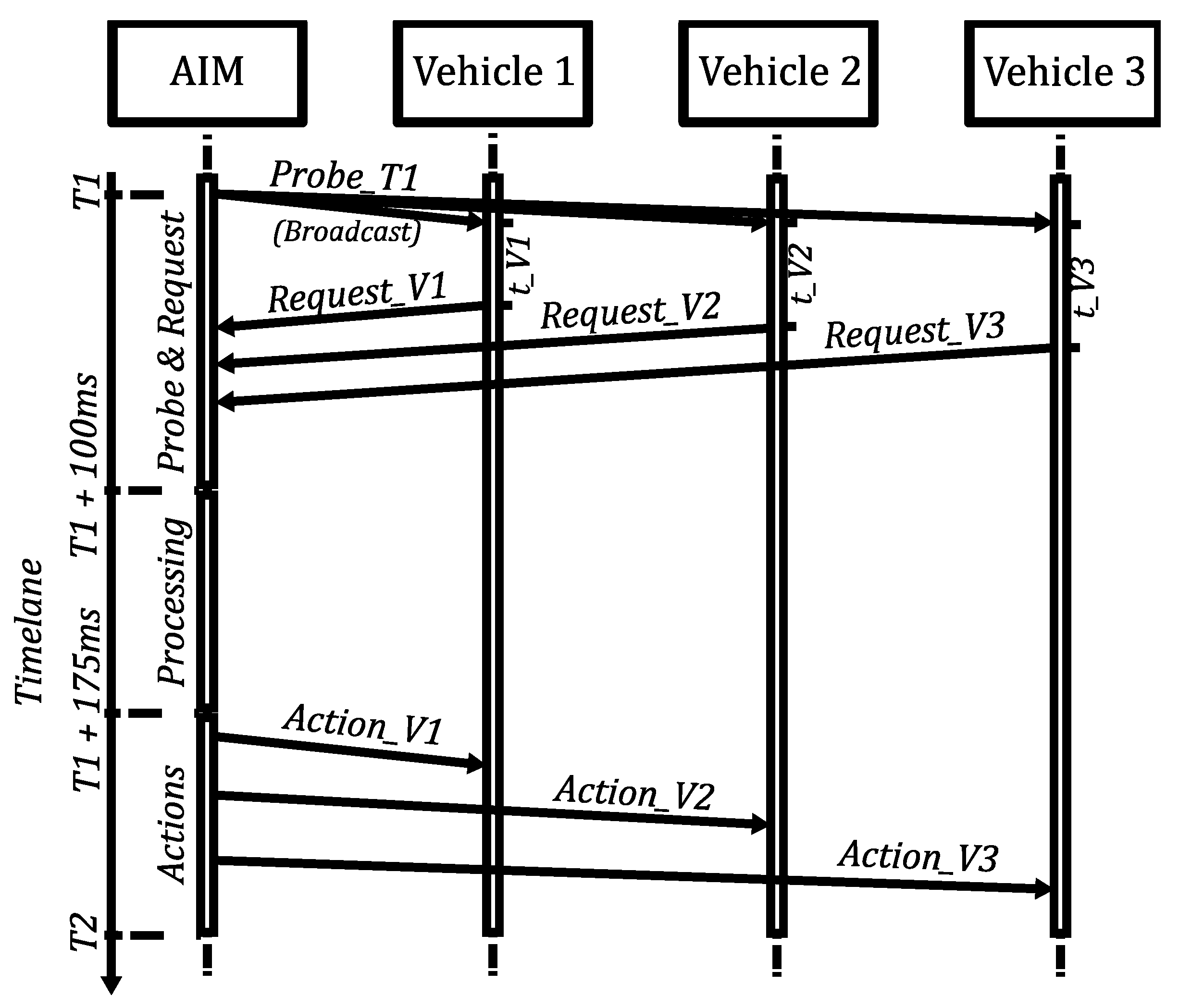
- Finally, we propose the set of messages, the time intervals between each message, as well as the communication protocol, to implement AIM5LA.
4. Testbed and Experiments
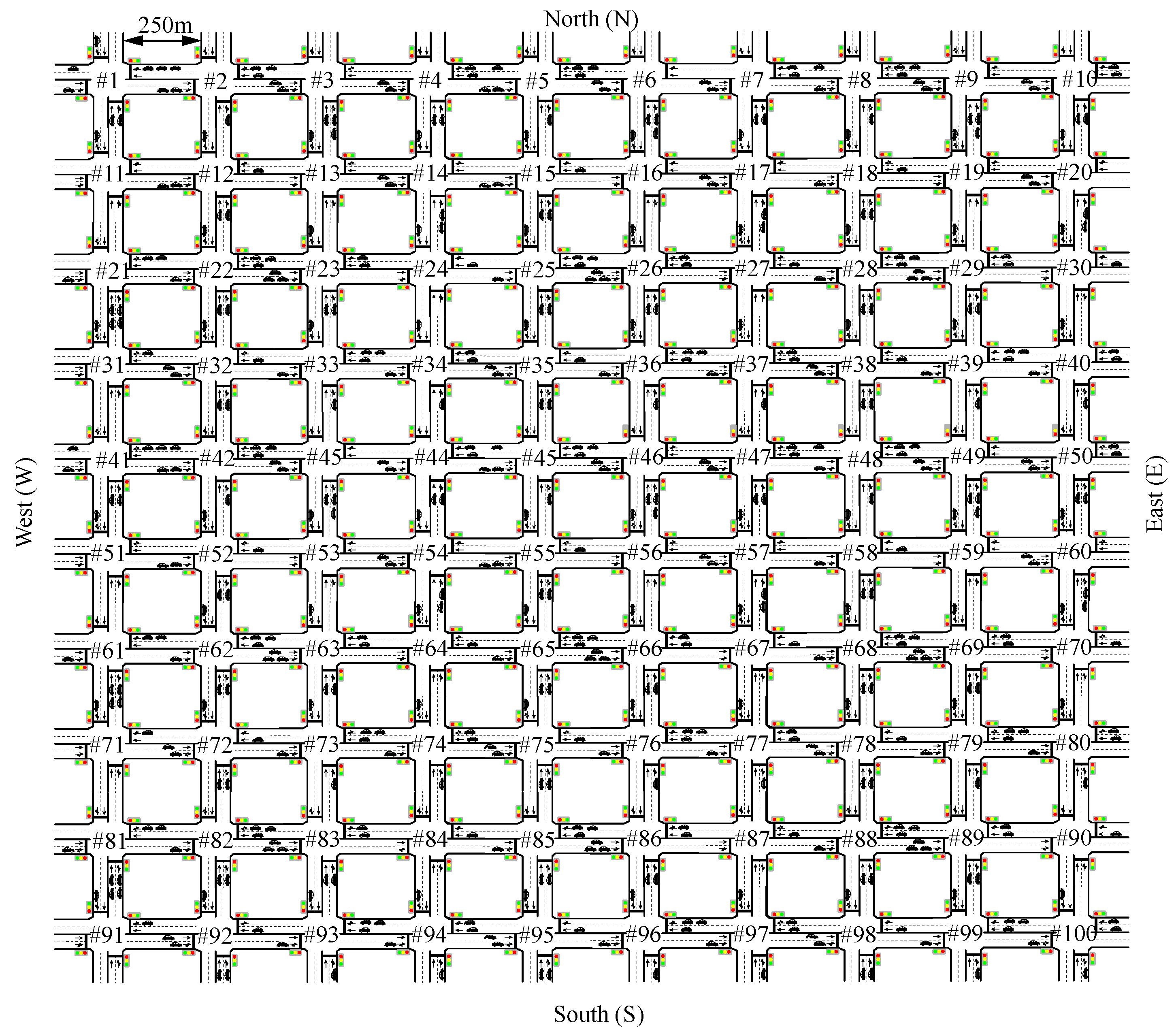
4.1. Testbed
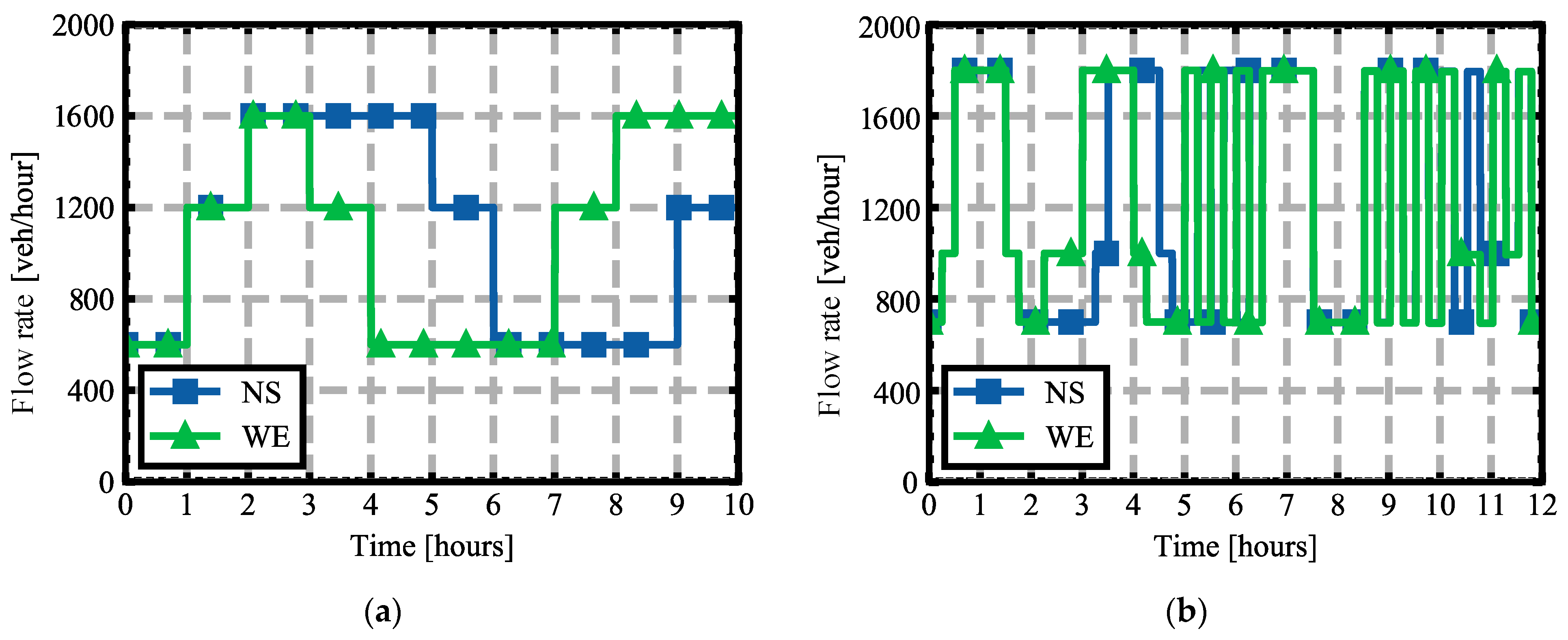
4.2. Experiments
- -
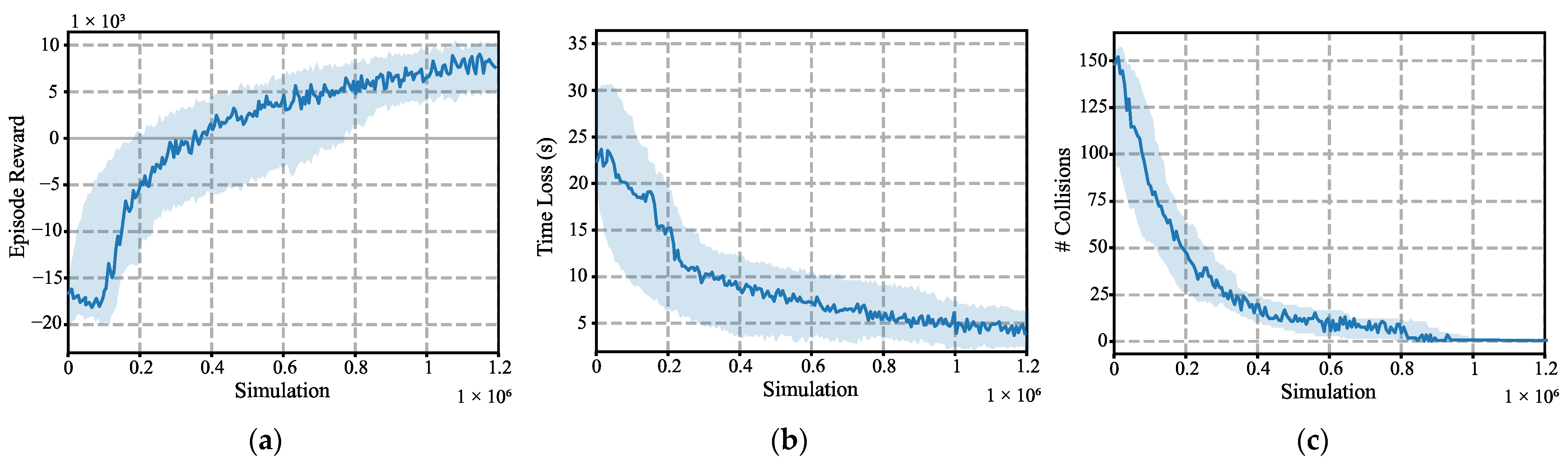
- −100 when there was an accident;
- -
- +100 when a vehicle crossed the intersection without an accident;
- -
- −control interval (−0.25) at each simulation interval to encourage optimization of time loss and crossing as quickly as possible.
5. Results
5.1. Experiment #1—Forecast Module Optimization
5.2. Experiment #2—Training AIM5LA
5.3. Experiment #3—Benchmarking AIM5LA
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hausknecht, M.; Au, T.-C.; Stone, P. Autonomous Intersection Management: Multi-intersection optimization. In 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems; IEEE: Piscataway, NJ, USA, 2011; pp. 4581–4586. [Google Scholar] [CrossRef] [Green Version]
- Guillen-Perez, A.; Cano, M. Intelligent IoT systems for traffic management: A practical application. IET Intell. Transp. Syst. 2021, 15, 273–285. [Google Scholar] [CrossRef]
- Sanchez-Iborra, R.; Cano, M.-D. On the Similarities Between Urban Traffic Management and Communication Networks: Application of the Random Early Detection Algorithm for Self-Regulating Intersections. IEEE Intell. Transp. Syst. Mag. 2017, 9, 48–61. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M. Multi-Agent Deep Reinforcement Learning to Manage Connected Autonomous Vehicles at Tomorrow’s Intersections. IEEE Trans. Veh. Technol. 2021, on review. 1–12. [Google Scholar]
- Dresner, K.; Stone, P. Multiagent traffic management: A reservation-based intersection control mechanism. In Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems, AAMAS 2004, New York, NY, USA, 19–23 July 2004; IEEE: New York, NY, USA, 2004; Volume 2, pp. 530–537. [Google Scholar]
- Dresner, K.; Stone, P. Multiagent traffic management: An improved intersection control mechanism. In Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS 05), Utrecht, The Netherlands, 25–29 July 2005; pp. 471–477. [Google Scholar]
- Dresner, K.; Stone, P. Multiagent Traffic Management: Opportunities for Multiagent Learning. In Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2006; Volume 3898, pp. 129–138. ISBN 3540330534. [Google Scholar]
- Dresner, K.; Stone, P. Sharing the road: Autonomous vehicles meet human drivers. In Proceedings of the Twentieth International Joint Conference on Artificial Intelligence (IJCAI 07), Hyderabad, India, 6–12 January 2007; Volume 1, pp. 1263–1268. [Google Scholar]
- Tachet, R.; Santi, P.; Sobolevsky, S.; Reyes-Castro, L.I.; Frazzoli, E.; Helbing, D.; Ratti, C. Revisiting Street Intersections Using Slot-Based Systems. PLoS ONE 2016, 11, e0149607. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Levin, M.W.; Boyles, S.D.; Patel, R. Paradoxes of reservation-based intersection controls in traffic networks. Transp. Res. Part A Policy Pract. 2016, 90, 14–25. [Google Scholar] [CrossRef]
- Huang, S.; Sadek, A.W.; Zhao, Y. Assessing the Mobility and Environmental Benefits of Reservation-Based Intelligent Intersections Using an Integrated Simulator. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1201–1214. [Google Scholar] [CrossRef]
- Wei, X.; Tan, G.; Ding, N. Batch-Light: An adaptive intelligent intersection control policy for autonomous vehicles. In Proceedings of the 2014 IEEE International Conference on Progress in Informatics and Computing, Shanghai, China, 16–18 May 2014; IEEE: Shanghai, China, 2014; pp. 98–103. [Google Scholar]
- Qian, X.; Altché, F.; Grégoire, J.; Fortelle, A. Autonomous Intersection Management systems: Criteria, implementation and evaluation. IET Intell. Transp. Syst. 2017, 11, 182–189. [Google Scholar] [CrossRef]
- Lee, J.; Park, B. Development and Evaluation of a Cooperative Vehicle Intersection Control Algorithm under the Connected Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Zhu, F.; Ukkusuri, S.V. A linear programming formulation for autonomous intersection control within a dynamic traffic assignment and connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 363–378. [Google Scholar] [CrossRef]
- Levin, M.W.; Fritz, H.; Boyles, S.D. On Optimizing Reservation-Based Intersection Controls. IEEE Trans. Intell. Transp. Syst. 2017, 18, 505–515. [Google Scholar] [CrossRef]
- Sun, W.; Zheng, J.; Liu, H.X. A capacity maximization scheme for intersection management with automated vehicles. Transp. Res. Procedia 2017, 23, 121–136. [Google Scholar] [CrossRef]
- Mirheli, A.; Hajibabai, L.; Hajbabaie, A. Development of a signal-head-free intersection control logic in a fully connected and autonomous vehicle environment. Transp. Res. Part C Emerg. Technol. 2018, 92, 412–425. [Google Scholar] [CrossRef]
- Carlino, D.; Boyles, S.D.; Stone, P. Auction-based autonomous intersection management. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 529–534. [Google Scholar]
- Wu, Y.; Chen, H.; Zhu, F. DCL-AIM: Decentralized coordination learning of autonomous intersection management for connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 103, 246–260. [Google Scholar] [CrossRef]
- Bengio, Y.; Louradour, J.; Collobert, R.; Weston, J. Curriculum learning. In Proceedings of the 26th Annual International Conference on Machine Learning—ICML ’09, Montreal, QC, Canada, 14–18 June 2009; ACM Press: New York, NY, USA, 2009; Volume 382, pp. 1–8. [Google Scholar]
- Fujimoto, S.; Van Hoof, H.; Meger, D. Addressing Function Approximation Error in Actor-Critic Methods. In Proceedings of the 35th International Conference on Machine Learning, ICML 2018, Stockholm, Sweden, 10–15 July 2018; Stockholmsmässan: Stockholm, Sweden, 2018; Volume 4, pp. 2587–2601. [Google Scholar]
- Perronnet, F.; Abbas-Turki, A.; El Moudni, A. A sequenced-based protocol to manage autonomous vehicles at isolated intersections. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; IEEE: The Hague, The Netherlands, 2013; pp. 1811–1816. [Google Scholar]
- Zheng, B.; Lin, C.-W.; Liang, H.; Shiraishi, S.; Li, W.; Zhu, Q. Delay-Aware Design, Analysis and Verification of Intelligent Intersection Management. In Proceedings of the 2017 IEEE International Conference on Smart Computing (SMARTCOMP), Hong Kong, China, 29–31 May 2017; IEEE: Hong Kong, China, 2017; pp. 1–8. [Google Scholar]
- Andert, E.; Khayatian, M.; Shrivastava, A. Crossroads. In Proceedings of the 54th Annual Design Automation Conference 2017, Austin, TX, USA, 18–22 June 2017; ACM: New York, NY, USA, 2017; Volume 12828, pp. 1–6. [Google Scholar]
- Khayatian, M.; Lou, Y.; Mehrabian, M.; Shirvastava, A. Crossroads+. ACM Trans. Cyber-Phys. Syst. 2020, 4, 1–28. [Google Scholar] [CrossRef]
- Wu, N.; Green, B.; Ben, X.; O’Banion, S. Deep Transformer Models for Time Series Forecasting: The Influenza Prevalence Case. In Proceedings of the 37th International Conference on Machine Learning, Vienna, Austria, 12–18 July 2020; pp. 1–10. [Google Scholar]
- Brown, T.B.; Mann, B.; Ryder, N.; Subbiah, M.; Kaplan, J.; Dhariwal, P.; Neelakantan, A.; Shyam, P.; Sastry, G.; Askell, A.; et al. Language Models are Few-Shot Learners. Adv. Neural Inf. Process. Syst. 2020, 33, 1877–1901. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. Adv. Neural Inf. Process. Syst. 2017, 1, 5998–6008. [Google Scholar] [CrossRef]
- Senior, A.W.; Evans, R.; Jumper, J.; Kirkpatrick, J.; Sifre, L.; Green, T.; Qin, C.; Žídek, A.; Nelson, A.W.R.; Bridgland, A.; et al. Improved protein structure prediction using potentials from deep learning. Nature 2020, 577, 706–710. [Google Scholar] [CrossRef] [PubMed]
- Guillen-Perez, A.; Cano, M.-D. RAIM: Reinforced Autonomous Intersection Management—AIM based on MADRL. In Proceedings of the NeurIPS 2020—Workshop Challenges of Real-World RL, Online, 11 December 2020; pp. 1–12. [Google Scholar]
- Nardini, G.; Sabella, D.; Stea, G.; Thakkar, P.; Virdis, A. Simu5G–An OMNeT++ Library for End-to-End Performance Evaluation of 5G Networks. IEEE Access 2020, 8, 181176–181191. [Google Scholar] [CrossRef]
- Virdis, A.; Nardini, G.; Stea, G.; Sabella, D. End-to-End Performance Evaluation of MEC Deployments in 5G Scenarios. J. Sens. Actuator Netw. 2020, 9, 57. [Google Scholar] [CrossRef]
- Arulkumaran, K.; Deisenroth, M.P.; Brundage, M.; Bharath, A.A. Deep Reinforcement Learning: A Brief Survey. IEEE Signal Process. Mag. 2017, 34, 26–38. [Google Scholar] [CrossRef] [Green Version]
- Schaul, T.; Quan, J.; Antonoglou, I.; Silver, D. Prioritized Experience Replay. In Proceedings of the 4th International Conference on Learning Representations (ICLR 2016), San Juan, Puerto Rico, 2–4 May 2016; pp. 1–21. [Google Scholar]
- Heidemann, J.; Isi, U.S.C. OMNeT++ Discrete Event Simulator. Available online: www.omnetpp.org (accessed on 17 July 2018).
- Mészáros, L.; Varga, A.; Kirsche, M. INET Framework. In Recent Advances in Network Simulation; Springer: Cham, Switzerland, 2019; pp. 55–106. ISBN 978-3-030-12842-5. [Google Scholar]
- Lopez, P.A.; Wiessner, E.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flotterod, Y.-P.; Hilbrich, R.; Lucken, L.; Rummel, J.; Wagner, P. Microscopic Traffic Simulation using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: Piscataway, NJ, USA, 2018; Volume 2018, pp. 2575–2582. [Google Scholar]
- Wegener, A.; Piórkowski, M.; Raya, M.; Hellbrück, H.; Fischer, S.; Hubaux, J.-P. TraCI: An interface for coupling road traffic and network simulators. In Proceedings of the 11th Communications and Networking Simulation Symposium on—CNS ’08, Ottawa, ON, Canada, 14–17 April 2008; ACM Press: New York, NY, USA, 2008; p. 155. [Google Scholar]
- Stevens, E.; Antiga, L.; Viehmann, T. Deep Learning With PyTorch. In Deep Learning with PyTorch; Manning Publications Co.: Shelter Island, NY, USA, 2020; pp. 61–95. [Google Scholar]
- SUMO—Vehicle Type Parameter Defaults. Available online: https://sumo.dlr.de/docs/Vehicle_Type_Parameter_Defaults.html (accessed on 17 August 2021).
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)?—Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulator | Parameter | Value |
|---|---|---|
| SUMO | Simulation step | 0.25 segs |
| Flow step | 100 veh/h | |
| Min flow | 200 veh/h | |
| Train duration | 5 min/simulation | |
| Test duration | 840 min/simulation | |
| Scenario | 4 branches, 3 lanes/way, and all ways. | |
| Control distance | 100 m | |
| Simu5G | Carrier Frequency | 2 GHz |
| Bandwidth | 20 MHz | |
| IM Tx Power | 40 dBm | |
| IM antenna gain | 12 dB | |
| IM noise figure | 5 dB | |
| AV antenna gain | 3 dB | |
| AV noise figure | 7 dB | |
| Path loss model | 3GPP TP 36.783 |
| Vehicle | Distribution (%) | Fuel Type/Electric |
|---|---|---|
| Car | 30 | Gasoline |
| Car | 40 | Diesel |
| Car | 20 | Electric |
| Van | 5 | Diesel |
| Bus | 5 | Diesel |
| Number of Vehicles | Mean Latency | Std Latency |
|---|---|---|
| 1 | 1.51 | 0.48 |
| 4 | 2.43 | 0.61 |
| 16 | 4.85 | 1.05 |
| 64 | 6.48 | 1.93 |
| 128 | 10.24 | 1.95 |
| 256 | 15.63 | 2.12 |
| Algorithm | Time Loss (s) | Collisions | Waiting Time (s) | CO2 Emiss. (g) | PMx Emiss. (mg) | Fuel Cons. (mL) | Elect. Cons. (W) |
|---|---|---|---|---|---|---|---|
| FX30 | 79.61 ± 8.98 | 0 ± 0 | 61.32 ± 7.99 | 101.78 ± 15.11 | 78.41 ± 8.54 | 391.12 ± 64.51 | 103.48 ± 11.51 |
| FX60 | 70.16 ± 11.41 | 0 ± 0 | 50.71 ± 6.11 | 89.64 ± 9.87 | 66.98 ± 7.21 | 333.74 ± 42.66 | 99.74 ± 9.63 |
| FX90 | 72.58 ± 7.42 | 0 ± 0 | 55.65 ± 7.05 | 95.87 ± 8.45 | 72.54 ± 7.88 | 351.52 ± 39.98 | 101.88 ± 9.88 |
| iREDVD [2] | 34.97 ± 3.32 | 0 ± 0 | 32.23 ± 4.44 | 53.44 ± 3.22 | 39.74 ± 6.11 | 205.25 ± 13.14 | 66.27 ± 4.48 |
| adv.RAIM [4] | 5.11 ± 1.24 | 49.91 ± 9.89 | 0.25 ± 0.03 | 25.48 ± 2.69 | 18.99 ± 2.81 | 124.47 ± 12.35 | 33.74 ± 3.81 |
| Andert et al. [25] | 4.98 ± 1.18 | 27.13 ± 3.11 | 0.24 ± 0.03 | 26.93 ± 2.33 | 17.52 ± 1.99 | 118.94 ± 18.74 | 31.67 ± 3.39 |
| AIM5LA_v0.1 | 4.12 ± 1.41 | 32.01 ± 4.98 | 0.24 ± 0.02 | 26.18 ± 1.29 | 17.82 ± 1.97 | 119.14 ± 15.29 | 30.26 ± 3.21 |
| AIM5LA_v0.2 | 4.89 ± 1.93 | 3.22 ± 2.61 | 0.28 ± 0.03 | 26.96 ± 1.46 | 18.49 ± 1.89 | 126.46 ± 18.46 | 32.34 ± 2.94 |
| AIM5LA | 5.42 ± 1.29 | 0 ± 0 | 0.31 ± 0.02 | 27.52 ± 1.97 | 19.22 ± 2.14 | 131.87 ± 17.42 | 34.29 ± 3.66 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonio, G.-P.; Maria-Dolores, C. AIM5LA: A Latency-Aware Deep Reinforcement Learning-Based Autonomous Intersection Management System for 5G Communication Networks. Sensors 2022, 22, 2217. https://doi.org/10.3390/s22062217
Antonio G-P, Maria-Dolores C. AIM5LA: A Latency-Aware Deep Reinforcement Learning-Based Autonomous Intersection Management System for 5G Communication Networks. Sensors. 2022; 22(6):2217. https://doi.org/10.3390/s22062217
Chicago/Turabian StyleAntonio, Guillen-Perez, and Cano Maria-Dolores. 2022. "AIM5LA: A Latency-Aware Deep Reinforcement Learning-Based Autonomous Intersection Management System for 5G Communication Networks" Sensors 22, no. 6: 2217. https://doi.org/10.3390/s22062217
APA StyleAntonio, G.-P., & Maria-Dolores, C. (2022). AIM5LA: A Latency-Aware Deep Reinforcement Learning-Based Autonomous Intersection Management System for 5G Communication Networks. Sensors, 22(6), 2217. https://doi.org/10.3390/s22062217