
Systematic Mapping Literature Review of Mobile Robotics Competitions





Abstract
:1. Introduction
2. Methodology
2.1. Planning
2.1.1. Planning the Research Questions
- RQ1: What type of mobile robotics competitions exist in the last few decades and with what aim?
- RQ2: Where do the mobile robotics competitions take place currently who and is their target public?
- RQ3: What type of robotics challenges are addressed by the mobile robotics competitions?
- RQ4: What type of technologies are used in mobile robotics competitions?
- RQ5: What is the final application area of the mobile robotics competitions?
- RQ6: How have these competitions been contributing positively to education?
2.1.2. Elaborating the PICOC
- Population (P): Who?
- Intervention (I): What and How?
- Comparison (C): What to compare?
- Outcome (O): The final objectives, what does the search obtain or improve?
- Context (C): What are the circumstances?
- Population (P): mobile robotics competitions;
- Intervention (I): detailed description about mobile robotics competitions;
- Comparison (C): compare all the mobile robotics competitions;
- Outcome (O): types, goals, target public, challenges, technologies used and application areas of the mobile robotics competitions;
- Context (C): mobile robots.
2.1.3. Selecting the Keywords and Synonyms
2.1.4. Inclusion and Exclusion Criteria
- The work is written in English;
- The work was published after 2001;
- The work must have information about one or more robotics competitions;
- The work must have included the “robotic competition” term.
- The paper is not accessible;
- The work is not written in English;
- The work was published before 2001;
- Work does not involve a robotic competition context;
- Works that include the term “robotic competition” but does not answer any research question.
2.1.5. Creating the Search String and Choosing the Sources
- ACM Digital Library: on the website we used the advanced search and the term “All” for each term in order to find it in any place of the paper. The query used in this data base was:[[All: “robotics competitions”] OR [All: “robotic competition”]] AND [[All: “performance”] OR [All: “challenges”] OR [All: “challenge”] OR [All: “robotics application”] OR [All: “technologies”] OR [All: “technology”] OR [All: “validation”] OR [All: “evaluation”] OR [All: “benchmark”]]
- IEEE: we used the same main equation shown at the beginning and added some terms like “Abstract”, “Author Keywords” and “Title” in the same place as “All”. This way we searched for the terms only in these topics of the paper;
- Scopus: on the website we used the same main equation in the advanced search tab and just added the term “TITLE-ABS-KEY” in the query, indicating that the search for the words is done only on the title, abstract and keywords of the paper. The modified query was:TITLE-ABS-KEY ((“robotic competition” OR “robotics competitions”)) AND TITLE-ABS-KEY ((“performance” OR “challenges” OR “challenge” OR “robotics application” OR “technologies” OR “technology” OR “validation” OR “evaluation” OR “benchmark”))
- Springer Link: exactly the same query cited at the beginning was used on the website simple search;
- Web of Science: the query was put in the search tab of the website and we added some terms at the beginning of the equation like “TI”, “AB” and “AK” indicating a specific search as explained before.TI = ((“robotics competitions” OR “robotic competition”) AND (“benchmark” OR “challenges” OR “challenge” OR “evaluation” OR “performance” OR “robotics application” OR “technologies” OR “technology” OR “validation”)) OR AB = ((“robotics competitions” OR “robotic competition”) AND (“benchmark” OR “challenges” OR “challenge” OR “evaluation” OR “performance” OR “robotics application” OR “technologies” OR “technology” OR “validation”)) OR AK = ((“robotics competitions” OR “robotic competition”) AND (“benchmark” OR “challenges” OR “challenge” OR “evaluation” OR “performance” OR “robotics application” OR “technologies” OR “technology” OR “validation”)).
2.1.6. Quality Assessment Checklist
- QQ1: Is the paper based on research and not on expert opinion?
- QQ2: Is there a clear objective of the research?
- QQ3: Are the work results discussed well?
- QQ4: Is the work based on one or more robotics competitions?
- QQ5: If the work is based on one or more robotics competitions, is the competition described well?
- QQ6: Does the work describe the challenges and activities of the robotics competition?
- QQ7: Does the work present the new technologies applied to robotics competitions?
- QQ8: Does the work discuss the robotics competitions’ contribution to education or industry?
- QQ9: Does the information or data obtained by the work answer at least one of the research questions?
2.1.7. Data Extraction Form
- DQ1: What are the main robotics competitions taking place currently and their goals?
- DQ2: Where do the main robotics competitions take place?
- DQ3: Which ages does the robotics competitions cover?
- DQ4: What are the main challenges and activities at the robotics competitions?
- DQ5: What are the main technologies used in the robotics competitions?
- DQ6: Which application areas can robotics competitions contribute?
- DQ7: Which robotics competitions contributes positively to education?
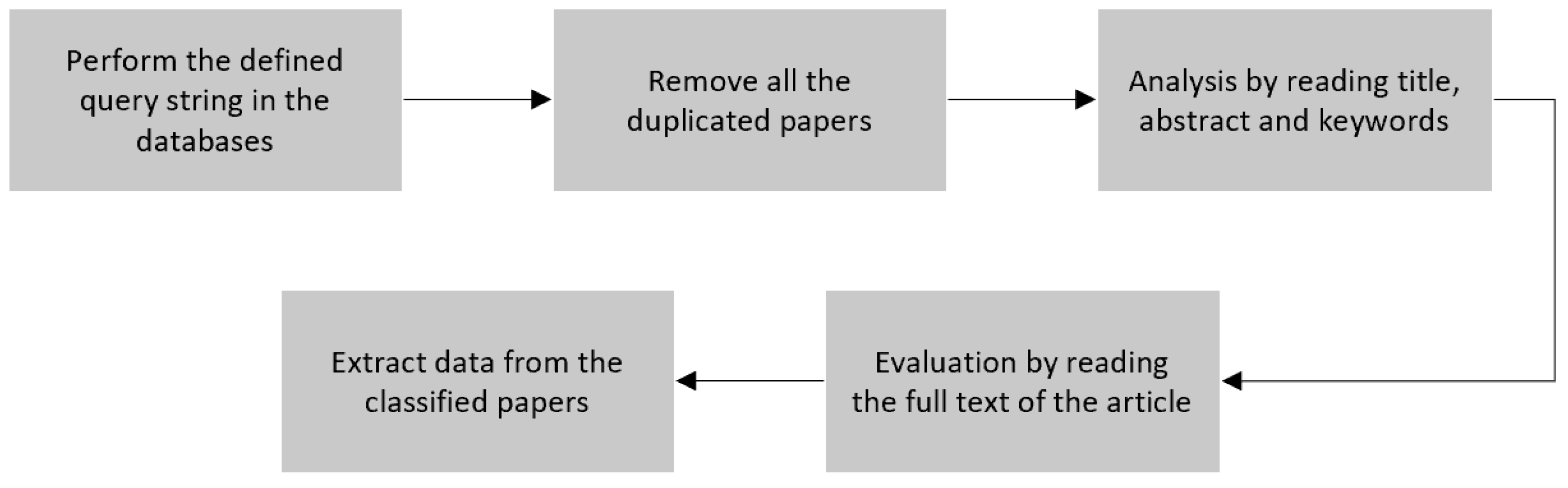
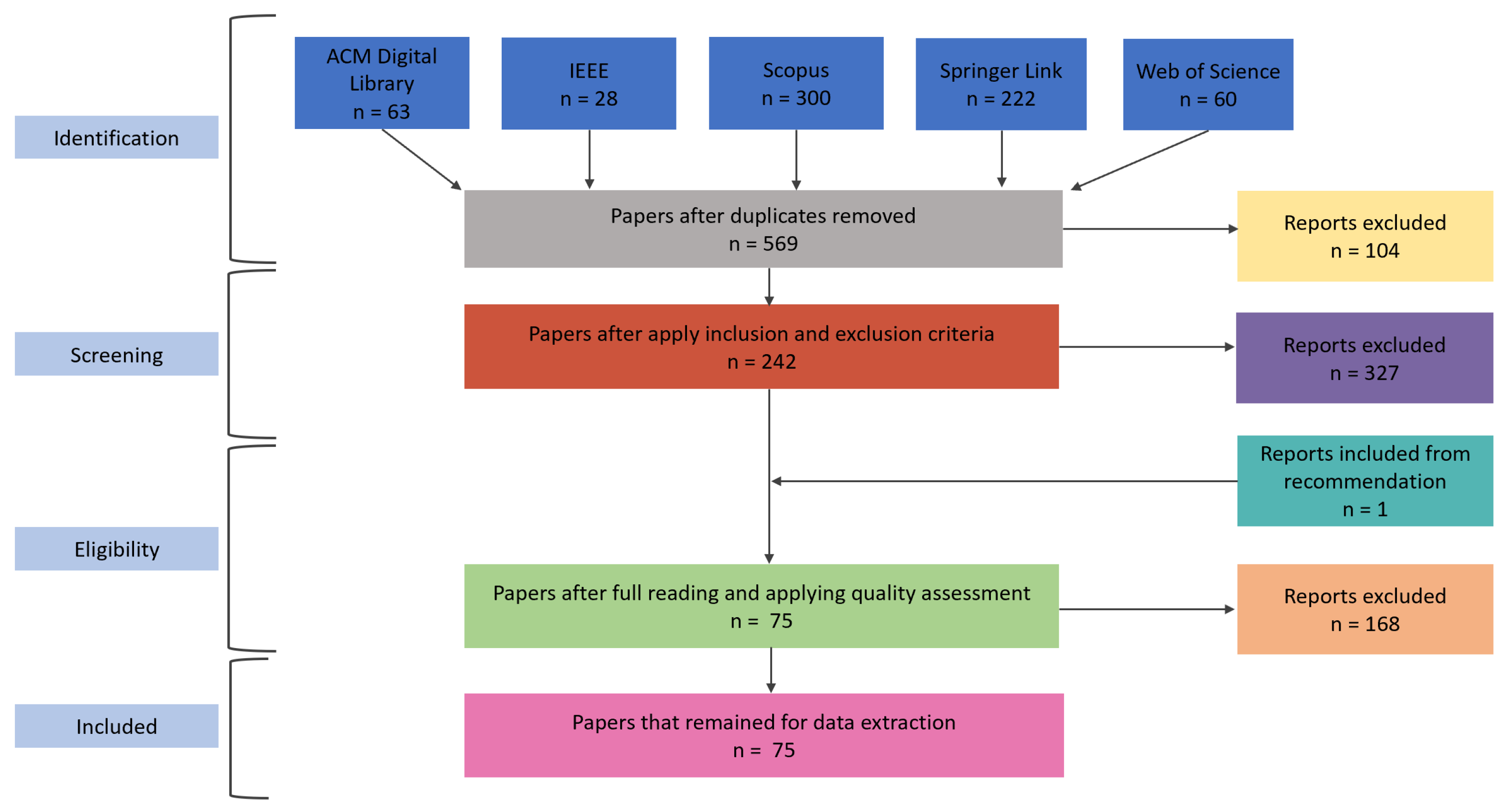
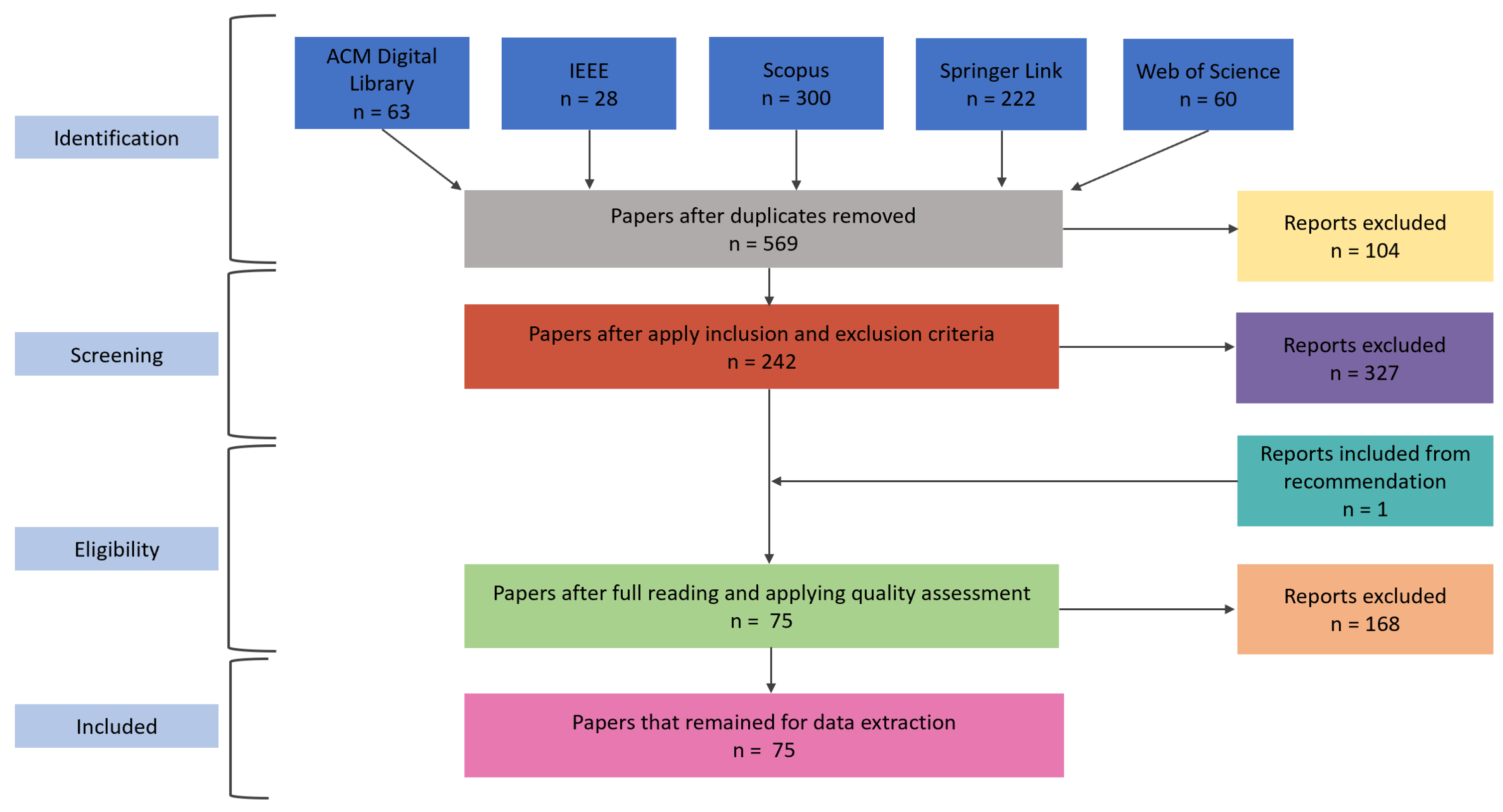
2.2. Conducting
- Identification: the papers found in each source using the query are saved and then the duplicate studies are removed.
- Screening: just the title, abstract and keywords are read applying the inclusion and exclusion criteria, the papers that are not approved by the criteria are removed too.
- Eligibility: for the remaining articles, we applied the quality questions, so the papers need to be read fully in order to obtain the answers for those questions and a good score. The papers that do not have a score above the limit must be deleted.
- Included: the papers with a high score are classified for the final review and we performed the data extraction using the data extraction form questions [11].
3. Results
4. Discussion
- RoboCup Junior;
- e-Yantra Robotics Competition (eYRC);
- Micromouse;
- Robot@Factory/Robot@Factory Lite;
- Balam Robot Competition (BRC);
- FIRST Robotics Competition/FIRST Lego League (FLL);
- VEX Robotics Competition;
- Student Autonomous Underwater Vehicle Challenge-Europe (SAUC-E);
- Mississippi BEST (MSBEST) robotics;
- World Robot Olympiad (WRO);
- Brazilian Robotics Olympiad;
- National Instruments Autonomous Robotics Competition (NIARC);
- EUROBOT competition;
- Cybertech;
- “Schüler bauen Roboter” program;
- MicroFactory;
- Roboparty;
- Latin American IEEE Robotics Competition;
- Robosub.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses 6 |
| STEM | Science, Technology, Engineering and Mathematics |
| STEAM | Science, Technology, Engineering, Arts and Mathematics |
| AGV | Automated Guided Vehicle |
| AUV | Autonomous Underwater Vehicle |
| FIRST | For Inspiration and Recognition of Science and Technology |
| SLR | Systematic Literature Review |
| PICOC | Population, Intervention, Comparison, Outcomes, Context |
| RQ | Research Question |
| Quality Question | |
| DQ | Data Question |
| WRS | World Robot Summit |
| ARIAC | Agile Robotics for Industrial Applications Competition |
| MBZIRC | Mohamed Bin Zayed International Robotics Competition |
| eYRC | e-Yantra Robotics Competition |
| RoCKIn | Robot Competitions Kick Innovation in Cognitive Systems and Robotics |
| SAUC-E | Student Autonomous Underwater Vehicles Challenge-Europe |
| ERL | European Robotics League |
| APC | Amazon Picking Challenge |
| EuRoC | European Robotics Challenge |
| IARC | International Aerial Robotics Competition |
| FLL | FIRST Lego League |
| MSBEST | Mississippi BEST |
| WRO | World Robot Olympiad |
| BRC | Balam Robot Competition |
| ELROB | European Land Robot Trial |
| MAGIC | Australian Multi Autonomous Ground-Robotic International Challenge |
| NIARC | National Instruments Autonomous Robotics Competition |
| TCFFHRC | Trinity College Fire-Fighting Home Robot Contest |
| USAR | Urban Search and Rescue |
| HRATC | Humanitarian Robotics and Automation Technology Challenge |
| SAVe | Students Autonomous Underwater Vehicle |
| OI | Oceanology International |
| ROS | Robot Operating System |
| SLAM | Simultaneous Localization and Mapping |
| AI | Artificial Intelligence |
| NIST | National Institute of Standards and Technology |
| vSLAM | Visual Simultaneous Localization and Mapping |
| UAM | Urban Air Mobility |
| PBL | Project Based Learning |
| HIL | Hardware in the Loop |
| FSM | Finite State Machine |
| EKF | Extended Kalman Filter |
| FPGA | Field-programmable Gate Array |
| GPS | Global Positioning System |
| UPM | Universidad Politécnica de Madrid |
| USARSim | Unified System for Automation and Robot Simulation |
| USA | United States of America |
References
- García, M.; Caballero, R.; González, F.; Viguria, A.; Ollero, A. Autonomous drone with ability to track and capture an aerial target. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 32–40. [Google Scholar]
- Ferri, G.; Ferreira, F.; Djapic, V. Boosting the talent of new generations of marine engineers through robotics competitions in realistic environments: The SAUC-E and euRathlon experience. In Proceedings of the OCEANS 2015-Genova, Genova, Italy, 18–21 May 2015; pp. 1–6. [Google Scholar]
- Ribeiro, A.F.; Lopes, G. Learning robotics: A review. Curr. Robot. Rep. 2020, 1, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Nardi, D.; Roberts, J.; Veloso, M.; Fletcher, L. Robotics competitions and challenges. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1759–1788. [Google Scholar]
- Costa, P.J.; Moreira, N.; Campos, D.; Gonçalves, J.; Lima, J.; Costa, P.L. Localization and navigation of an omnidirectional mobile robot: The robot@ factory case study. IEEE Rev. Iberoam. Tecnol. Aprendiz. 2016, 11, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Iocchi, L.; Holz, D.; Ruiz-del Solar, J.; Sugiura, K.; Van Der Zant, T. RoboCup@ Home: Analysis and results of evolving competitions for domestic and service robots. Artif. Intell. 2015, 229, 258–281. [Google Scholar] [CrossRef]
- De Oliveira, R.W.; Bauchspiess, R.; Porto, L.H.; de Brito, C.G.; Figueredo, L.F.; Borges, G.A.; Ramos, G.N. A robot architecture for outdoor competitions. J. Intell. Robot. Syst. 2020. [Google Scholar] [CrossRef]
- Eguchi, A. RoboCupJunior for promoting STEM education, 21st century skills, and technological advancement through robotics competition. Robot. Auton. Syst. 2016, 75, 692–699. [Google Scholar] [CrossRef]
- Wilczynski, V.; Flowers, W. FIRST Robotics Competition: University curriculum applications of mobile robots. Int. J. Eng. Educ. 2006, 22, 792. [Google Scholar]
- Eguchi, A.; Hughes, N.; Stocker, M.; Shen, J.; Chikuma, N. RoboCupJunior—A decade later. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2011; pp. 63–77. [Google Scholar]
- Cruz-Benito, J. Systematic Literature Review & Mapping; University of Salamanca: Salamanca, Spain, 2016. [Google Scholar]
- Petticrew, M.; Roberts, H. Systematic Reviews in the Social Sciences: A Practical Guide; Blackwell: Oxford, UK, 2006. [Google Scholar]
- Popay, J.; Roberts, H.; Sowden, A.; Petticrew, M.; Britten, N.; Arai, L.; Roen, K.; Rodgers, M. Developing guidance on the conduct of narrative synthesis in systematic reviews. J. Epidemiol. Community Health 2005, 59, A7. [Google Scholar]
- Higgins, J.P.T.; Green, S. (Eds.) Cochrane Handbook for Systematic Reviews of Interventions. Version 5.1.0 [Updated March 2011]; The Cochrane Collaboration: London, UK, 2011; Available online: www.cochrane-handbook.org (accessed on 15 December 2021).
- Dybå, T.; Kampenes, V.B.; Sjøberg, D.I. A systematic review of statistical power in software engineering experiments. Inf. Softw. Technol. 2006, 48, 745–755. [Google Scholar] [CrossRef]
- Parsifal. Available online: https://parsif.al/ (accessed on 5 July 2021).
- Ruiz-del Solar, J.; Zagal, J.C. How contests can foster the research activities on robotics in developing countries: Chile—A case study. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2003; pp. 748–756. [Google Scholar]
- Dicken, G.; Butler, N.; Kutch, M.E.; Erickson, J.E. Application of Intelligent Control to the 2007 FIRST Robotics Competition. In Proceedings of the 2007 IEEE Systems and Information Engineering Design Symposium, Charlottesville, VA, USA, 27 April 2007; pp. 1–4. [Google Scholar]
- Oh, P.Y.; Sevcik, K.W.; Green, W.E. Aerial Robotics Competition: Lessons in Autonomy. In Proceedings of the AAAI Spring Symposium: Semantic Scientific Knowledge Integration, Stanford, CA, USA, 28–26 March 2007; pp. 124–129. [Google Scholar]
- Krajník, T.; Chudoba, J.; Fišer, O. A Mobile Robot for EUROBOT Mars Challenge. In International Conference on Research and Education in Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 107–118. [Google Scholar]
- Navarro, I.; Galán, R. Cybertech Robotic Competition. In International Conference on Research and Education in Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 134–144. [Google Scholar]
- Wilczynski, V.; Mittelman, J.S.; Lim, N. 2000 robotic applications using the national instruments CompactRIO embedded control system. In Proceedings of the 2009 IEEE International Conference on Technologies for Practical Robot Applications, Woburn, MA, USA, 9–10 November 2009; pp. 186–194. [Google Scholar]
- Azevedo, J.; Oliveira, M.; Pacheco, P.; Reis, L.P. A Cooperative CiberMouse@ RTSS08 Team. In Portuguese Conference on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; pp. 251–262. [Google Scholar]
- Baltes, J.; Anderson, J. Advancing artificial intelligence through minimalist humanoid robotics. In Design and Control of Intelligent Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2009; pp. 355–376. [Google Scholar]
- Ahlgren, D.; Verner, I. Assistive Robotics Competition RoboWaiter: A New Approach to Integrating Robotics and Socially Responsible Education; American Society for Engineering Education: Washington, DC, USA, 2010. [Google Scholar]
- Turhan, B.; Meriçli, Ç.; Meriçli, T. Better, faster, and cheaper: What is better software? In Proceedings of the 6th International Conference on Predictive Models in Software Engineering, Timisoara, Romania, 12–13 September 2010; pp. 1–7. [Google Scholar]
- Schneider, F.E.; Wildermuth, D.; Wolf, H.L. Professional ground robotic competitions from an educational perspective: A consideration using the example of the European Land Robot Trial (ELROB). In Proceedings of the 2012 6th IEEE International Conference Intelligent Systems, Sofia, Bulgaria, 6–8 September 2012; pp. 399–405. [Google Scholar]
- Stuckler, J.; Holz, D.; Behnke, S. Robocup@ home: Demonstrating everyday manipulation skills in robocup@ home. IEEE Robot. Autom. Mag. 2012, 19, 34–42. [Google Scholar] [CrossRef]
- Eguchi, A.; Almeida, L. A proposal for RoboCupJunior in Africa: Promoting educational experience with robotics. In Proceedings of the 2013 Africon, Pointe aux Piments, Mauritius, 9–12 September 2013; pp. 1–5. [Google Scholar]
- Butala, P.; Škulj, G.; Oosthuizen, G.A.; Vrabič, R. Robotics competitions as motivator for project oriented learning in mechatronics. In Proceedings of the 2013 6th Robotics and Mechatronics Conference (RobMech), Durban, South Africa, 30–31 October 2013; pp. 140–145. [Google Scholar]
- Ahlgren, D.J.; Verner, I.M. Socially responsible engineering education through assistive robotics projects: The robowaiter competition. Int. J. Soc. Robot. 2013, 5, 127–138. [Google Scholar] [CrossRef]
- Williams, H.; Browne, W.N.; Carnegie, D.A. Robotic competitions: Short term pain for long term gain. In Proceedings of the 2014 Australasian Conference on Robotics & Automation, Melbourne, Australia, 2–4 December 2014. [Google Scholar]
- Majek, K.; Musialik, P.; Kaczmarek, P.; Będkowski, J. Lesson Learned from Eurathlon 2013 Land Robot Competition. In Recent Advances in Automation, Robotics and Measuring Techniques; Springer: Berlin/Heidelberg, Germany, 2014; pp. 441–451. [Google Scholar]
- Krithivasan, S.; Shandilya, S.; Lala, K.; Arya, K. Massive Project Based Learning through a Competition: Impact of and Insights from the e-Yantra Robotics Competition (eYRC–2013). In Proceedings of the 2014 IEEE Sixth International Conference on Technology for Education, Amritapuri, India, 18–21 December 2014; pp. 156–163. [Google Scholar]
- Cabrita, G.; Madhavan, R.; Marques, L. A framework for remote field robotics competitions. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 192–197. [Google Scholar]
- Chen, Y.; Wu, F.; Wang, N.; Tang, K.; Cheng, M.; Chen, X. KeJia-LC: A low-cost mobile robot platform—Champion of demo challenge on benchmarking service robots at RoboCup 2015. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2015; pp. 60–71. [Google Scholar]
- Amigoni, F.; Bastianelli, E.; Berghofer, J.; Bonarini, A.; Fontana, G.; Hochgeschwender, N.; Iocchi, L.; Kraetzschmar, G.; Lima, P.; Matteucci, M.; et al. Competitions for benchmarking: Task and functionality scoring complete performance assessment. IEEE Robot. Autom. Mag. 2015, 22, 53–61. [Google Scholar] [CrossRef]
- Buck, S.; Hanten, R.; Huskić, G.; Rauscher, G.; Kloss, A.; Leininger, J.; Ruff, E.; Widmaier, F.; Zell, A. Conclusions from an object-delivery robotic competition: Sick robot day 2014. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 137–143. [Google Scholar]
- Schneider, F.E.; Wildermuth, D.; Wolf, H.L. ELROB and EURATHLON: Improving search & rescue robotics through real-world robot competitions. In Proceedings of the 2015 10th International Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 6–8 July 2015; pp. 118–123. [Google Scholar]
- Pinto, A.M.; Moreira, A.P.; Costa, P.G. A localization method based on map-matching and particle swarm optimization. J. Intell. Robot. Syst. 2015, 77, 313–326. [Google Scholar] [CrossRef]
- Silva, M.P.; Neves, D.; Gonçalves, J.; Costa, P. Proposal of the microfactory robotic competition, ot the factory environment and of its official robot which also a low cost versatile educational robot. In Proceedings of the 10th Annual International Technology, Education and Development Conference (INTED2016), Valencia, Spain, 7–9 March 2016; Volume 1, pp. 64–72. [Google Scholar]
- Aroca, R.V.; Pazelli, T.F.; Tonidandel, F.; Filho, A.C.; Simes, A.S.; Colombini, E.L.; Burlamaqui, A.M.; Goncalves, L.M. Brazilian Robotics Olympiad: A successful paradigm for science and technology dissemination. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416658166. [Google Scholar] [CrossRef] [Green Version]
- Ferrein, A.; Schiffer, S.; Booysen, T.; Stopforth, R. Why it is harder to run RoboCup in South Africa: Experiences from German South African collaborations. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416662789. [Google Scholar] [CrossRef] [Green Version]
- Insaurralde, C.C.; Kaupisch, T. Benchmarking assessment for technology readiness in SpaceBot. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016; pp. 1–9. [Google Scholar]
- Krithivasan, S.; Shandilya, S.; Shakya, S.; Arya, K.; Lala, K. Building Inclusiveness in a PBL Based Online Robotics Competition: Challenges and Outcomes. In Proceedings of the 2016 International Conference on Learning and Teaching in Computing and Engineering (LaTICE), Mumbai, India, 31 March–3 April 2016; pp. 9–13. [Google Scholar]
- Silva, M.P.; Gonçalves, J.; Costa, P. Didactic experiences involving mobile robotics having microfactory as context. In Proceedings of the 8th International Conference on Education and New Learning, Barcelona, Spain, 4–6 July 2016; Volume 1, pp. 704–712. [Google Scholar]
- Steinbauer, G.; Ferrein, A. 20 years of RoboCup. KI-Künstliche Intell. 2016, 30, 225–232. [Google Scholar] [CrossRef] [Green Version]
- Niemueller, T.; Zug, S.; Schneider, S.; Karras, U. Knowledge-based instrumentation and control for competitive industry-inspired robotic domains. KI-Künstliche Intell. 2016, 30, 289–299. [Google Scholar] [CrossRef]
- Shoval, S. VolleyBot: A competative framework for AI and UAV research and development. In Proceedings of the 2016 IEEE International Conference on the Science of Electrical Engineering (ICSEE), Eilat, Israel, 16–18 November 2016; pp. 1–5. [Google Scholar]
- White, V.; Alexander, J.; Prince, D. Mississippi BEST Robotics: An analysis of impact and outcomes on student performance and perceptions towards earning STEM degrees. In Proceedings of the ASEE Annual Conference, Columbus, OH, USA, 24–28 June 2017. [Google Scholar]
- Genter, K.; Laue, T.; Stone, P. Three years of the RoboCup standard platform league drop-in player competition. Auton. Agents Multi-Agent Syst. 2017, 31, 790–820. [Google Scholar] [CrossRef]
- Menekse, M.; Higashi, R.; Schunn, C.D.; Baehr, E. The role of robotics teams’ collaboration quality on team performance in a robotics tournament. J. Eng. Educ. 2017, 106, 564–584. [Google Scholar] [CrossRef]
- Ferri, G.; Ferreira, F.; Djapic, V. Multi-domain robotics competitions: The CMRE experience from SAUC-E to the European Robotics League Emergency Robots. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar]
- Winfield, A.F.; Franco, M.P.; Brueggemann, B.; Castro, A.; Ferri, G.; Ferreira, F.; Liu, X.; Petillot, Y.; Roning, J.; Schneider, F.; et al. euRathlon and ERL emergency: A multi-domain multi-robot grand challenge for search and rescue robots. In ROBOT 2017: Third Iberian Robotics Conference; Springer: Berlin/Heidelberg, Germany, 2017; pp. 263–271. [Google Scholar]
- Pöhner, N.; Hennecke, M. Learning problem solving through educational robotics competitions: First results of an exploratory case study. In Proceedings of the 13th Workshop in Primary and Secondary Computing Education, Potsdam, Germany, 4–6 October 2018; pp. 1–4. [Google Scholar]
- Zhu, J.; Zhu, J.; Wang, Z.; Guo, S.; Xu, C. Hierarchical decision and control for continuous multitarget problem: Policy evaluation with action delay. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 464–473. [Google Scholar] [CrossRef]
- Spreng, M.; Knopp, M.; Heiser, I. Enthused for Engineering—A Robot Competition to Promote STEM Interests in High School Students. In Proceedings of the 11th International Conference on Education and New Learning Technologies (EDULEARN19), Palma, Spain, 1–3 July 2019; pp. 6634–6642. [Google Scholar]
- Usart, M.; Schina, D.; Esteve-Gonzalez, V.; Gisbert, M. Are 21st Century Skills Evaluated in Robotics Competitions? The Case of First LEGO League Competition. In Proceedings of the 11th International Conference on Computer Supported Education (CSEDU 2019), Crete, Greece, 2–4 May 2019; pp. 445–452. [Google Scholar]
- Yokokohji, Y.; Kawai, Y.; Shibata, M.; Aiyama, Y.; Kotosaka, S.; Uemura, W.; Noda, A.; Dobashi, H.; Sakaguchi, T.; Yokoi, K. Assembly Challenge: A robot competition of the Industrial Robotics Category, World Robot Summit–summary of the pre-competition in 2018. Adv. Robot. 2019, 33, 876–899. [Google Scholar] [CrossRef] [Green Version]
- Piardi, L.; Eckert, L.; Lima, J.; Costat, P.; Valente, A.; Nakano, A. 3D simulator with hardware-in-the-loop capability for the micromouse competition. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Porto, Portugal, 24–26 April 2019; pp. 1–6. [Google Scholar]
- Chicas, Y.; Canek, R.; Rodas, O. Developing stem competences by building low-cost technology robots: A work in progress. In Proceedings of the 2019 IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 16 March 2019; pp. 379–383. [Google Scholar]
- Ferri, G.; Ferreira, F.; Djapic, V.; Petillot, Y.; Palau Franco, M. The euRathlon 2015 Grand Challenge: The first outdoor multi-domain search and rescue robotics competition—A marine perspective. Mar. Technol. Soc. J. 2019, 50, 81–97. [Google Scholar] [CrossRef]
- Lima, J.; Costa, P.; Brito, T.; Piardi, L. Hardware-in-the-loop simulation approach for the Robot at Factory Lite competition proposal. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Porto, Portugal, 24–26 April 2019; pp. 1–6. [Google Scholar]
- Sullivan, A.; Bers, M.U. VEX Robotics Competitions: Gender Differences in Student Attitudes and Experiences. J. Inf. Technol. Educ. 2019, 18, 97–112. [Google Scholar] [CrossRef] [Green Version]
- Morris, K.J.; Samonin, V.; Baltes, J.; Anderson, J.; Lau, M.C. A robust interactive entertainment robot for robot magic performances. Appl. Intell. 2019, 49, 3834–3844. [Google Scholar] [CrossRef]
- Limosani, R.; Manzi, A.; Faggiani, A.; Bianchi, M.; Pagliai, M.; Ridolfi, A.; Allotta, B.; Dario, P.; Cavallo, F. Low-cost solution in international robotic challenge: Lessons learned by Tuscany Robotics Team at ERL Emergency Robots 2017. J. Field Robot. 2019, 36, 587–601. [Google Scholar] [CrossRef]
- Braun, J.; Fernandes, L.A.; Moya, T.; Oliveira, V.; Brito, T.; Lima, J.; Costa, P. Robot@ factory lite: An educational approach for the competition with simulated and real environment. In Robot 2019: Fourth Iberian Robotics Conference; Springer: Berlin/Heidelberg, Germany, 2019; pp. 478–489. [Google Scholar]
- Gonçalves, J.; Pinto, V.H.; Costa, P. A line follower educational mobile robot performance robustness increase using a competition as benchmark. In Proceedings of the 2019 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 934–939. [Google Scholar]
- Kashinath Narvekar, S.; Bessariya, R.; Sadananda, A.; Arya, K. Learn, Build and Compete: An Aquatic Robot-Fish Challenge. In Proceedings of the 2020 3rd International Conference on Education Technology Management, London, UK, 17–19 December 2020; pp. 60–65. [Google Scholar]
- Zawadniak, P.; Piardi, L.; Brito, T.; Lima, J.; Costa, P.; Monteiro, A.L.; Costa, P.; Pereira, A.I. A Micromouse Scanning and Planning Algorithm based on Modified Floodfill Methodology with Optimization. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 245–250. [Google Scholar]
- Panwar, A.; Chauhan, A.; Arya, K. Analyzing learning outcomes for a massive online competition through a project-based learning engagement. In Proceedings of the 2020 IEEE Global Engineering Education Conference (EDUCON), Porto, Portugal, 27–30 April 2020; pp. 1246–1251. [Google Scholar]
- Canek, R.; Torres, P.; Rodas, O. Encouraging Higher Education STEM Careers Through Robotics Competitions. In Proceedings of the 2020 IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 1 August 2020; pp. 1–6. [Google Scholar]
- Ferreira, F.; Ferri, G. Marine Robotics Competitions: A Survey. Curr. Robot. Rep. 2020, 1, 169–178. [Google Scholar] [CrossRef]
- Franchi, M.; Fanelli, F.; Bianchi, M.; Ridolfi, A.; Allotta, B. Underwater robotics competitions: The European Robotics League emergency robots experience with FeelHippo AUV. Front. Robot. 2020, 7, 3. [Google Scholar] [CrossRef] [Green Version]
- Hughes, J.; Gilday, K.; Scimeca, L.; Garg, S.; Iida, F. Flexible, adaptive industrial assembly: Driving innovation through competition. Intell. Serv. Robot. 2020, 13, 169–178. [Google Scholar] [CrossRef] [Green Version]
- Kohout, P.; De Bortoli, M.; Ludwiger, J.; Ulz, T.; Steinbauer, G. A multi-robot architecture for the RoboCup Logistics League. Elektrotech. Inform. 2020, 137, 291–296. [Google Scholar] [CrossRef]
- Ferrando, A.; Kootbally, Z.; Piliptchak, P.; Cardoso, R.C.; Schlenoff, C.; Fisher, M. Runtime Verification of the ARIAC Competition: Can a Robot be Agile and Safe at the same time? In Proceedings of the 7th Italian Workshop on Artificial Intelligence and Robotics (AIRO 2020), Online Conference, 26 November 2020; pp. 7–11. [Google Scholar]
- Sarkar, A.; Arya, K. Teaching Marker-based Augmented Reality in a PBL Based Online Robotics Competition. In Proceedings of the 2020 IEEE 20th International Conference on Advanced Learning Technologies (ICALT), Tartu, Estonia, 6–9 July 2020; pp. 338–340. [Google Scholar]
- Hofmann, T.; Viehmann, T.; Gomaa, M.; Habering, D.; Niemueller, T.; Lakemeyer, G.; Team, C.R. Multi-Agent Goal Reasoning with the CLIPS Executive in the RoboCup Logistics League. In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021), Online Conference, 4–6 February 2021; pp. 80–91. [Google Scholar]
- Taniguchi, A.; Isobe, S.; El Hafi, L.; Hagiwara, Y.; Taniguchi, T. Autonomous planning based on spatial concepts to tidy up home environments with service robots. Adv. Robot. 2021, 35, 471–489. [Google Scholar] [CrossRef]
- Antonioni, E.; Suriani, V.; Riccio, F.; Nardi, D. Game Strategies for Physical Robot Soccer Players: A Survey. IEEE Trans. Games 2021, 13, 342–357. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Keywords | Synonyms | Related to |
|---|---|---|
| Benchmark | Outcome | |
| Challenges | Challenge | Outcome |
| Evaluation | Outcome | |
| Performance | Outcome | |
| Robotics application | Outcome | |
| Robotics competitions | Robotic competition | Population |
| Technologies | Technology | Outcome |
| Validation | Outcome |
| Reference | QQ1 | QQ2 | QQ3 | QQ4 | QQ5 | QQ6 | QQ7 | QQ8 | QQ9 | Final Score |
|---|---|---|---|---|---|---|---|---|---|---|
| [1] | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Partially | Yes | 8.5 |
| [2] | Yes | No | Partially | Yes | Yes | Yes | No | Yes | Yes | 6.5 |
| [3] | Yes | Yes | Yes | Partially | Partially | Partially | No | Yes | Yes | 6.5 |
| [4] | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | Yes | 8.0 |
| [5] | Yes | Yes | Yes | Yes | Partially | Partially | Partially | Partially | Yes | 7.0 |
| [6] | Partially | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | 7.5 |
| [7] | Yes | Yes | Yes | Yes | Partially | No | Partially | Partially | Yes | 6.5 |
| [8] | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Yes | 9.0 |
| [9] | Yes | Yes | Yes | Yes | Yes | Yes | Partially | Yes | Yes | 8.5 |
| [10] | Partially | Yes | Partially | Yes | Yes | Yes | No | Yes | Yes | 7.0 |
| [17] | Partially | Yes | Yes | Yes | Partially | Yes | No | Yes | Yes | 7.0 |
| [18] | Yes | Yes | No | Yes | Yes | Yes | No | Yes | Yes | 7.0 |
| [19] | Yes | Yes | Partially | Yes | Yes | Yes | No | No | Yes | 6.5 |
| [20] | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | Yes | 8.0 |
| [21] | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | Yes | 8.0 |
| [22] | Yes | Yes | Partially | Yes | Yes | Yes | Yes | No | Yes | 7.5 |
| [23] | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | Yes | 8.0 |
| [24] | Yes | Yes | Partially | Yes | Partially | Partially | No | Yes | Yes | 6.5 |
| [25] | Yes | Yes | Partially | Yes | Yes | Yes | No | No | Yes | 6.5 |
| [26] | Yes | Yes | Partially | Yes | Yes | Partially | Yes | Partially | Yes | 7.5 |
| [27] | Yes | Yes | Yes | Yes | Yes | Yes | Partially | No | Yes | 7.5 |
| [28] | Yes | Yes | Partially | Yes | Yes | Yes | Partially | Yes | Yes | 8.0 |
| [29] | Yes | Yes | Partially | Yes | Yes | Yes | No | Yes | Yes | 7.5 |
| [30] | Yes | Yes | Yes | Yes | Yes | Partially | Partially | No | Yes | 7.0 |
| [31] | Yes | Yes | Yes | Yes | Yes | Yes | Yes | Partially | Yes | 8.5 |
| [32] | Yes | Yes | Yes | Yes | Partially | Partially | Yes | Partially | Yes | 7.5 |
| [33] | Partially | Yes | Partially | Yes | Yes | Yes | Partially | Yes | Yes | 7.5 |
| [34] | Yes | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | 8.0 |
| [35] | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | Yes | 8.0 |
| [36] | Yes | Partially | No | Yes | Yes | Yes | Partially | Partially | Yes | 6.5 |
| [37] | Yes | Partially | Yes | Yes | Yes | Partially | No | Partially | Yes | 6.5 |
| [38] | Yes | Yes | Partially | Yes | Yes | Yes | Partially | Yes | Yes | 8.0 |
| [39] | Yes | Yes | Yes | Partially | Yes | Yes | No | Partially | Yes | 7.0 |
| [40] | Yes | Yes | Partially | Yes | Yes | Yes | No | No | Yes | 6.5 |
| [41] | Partially | Yes | Partially | Yes | Yes | Yes | Partially | No | Yes | 6.5 |
| [42] | Yes | Yes | Partially | Yes | Yes | Yes | Partially | Partially | Yes | 7.5 |
| [43] | Yes | Yes | Partially | Yes | Partially | Yes | Partially | Partially | Yes | 8.0 |
| [44] | Yes | Partially | Partially | Yes | Yes | Yes | No | Partially | Yes | 6.5 |
| [45] | Yes | Yes | Yes | Yes | Yes | Yes | No | No | Yes | 7.0 |
| [46] | Yes | Yes | Partially | Yes | Yes | Partially | Partially | Yes | Yes | 7.5 |
| [47] | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | Yes | 8.0 |
| [48] | Yes | Yes | No | Yes | Yes | Yes | Partially | Partially | Yes | 7.0 |
| [49] | Yes | Yes | Yes | Yes | Partially | Partially | No | Partially | Yes | 6.5 |
| [50] | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | Yes | 8.0 |
| [51] | Partially | Yes | Partially | Yes | Yes | Partially | No | Yes | Yes | 6.5 |
| [52] | Yes | Yes | Yes | Yes | Yes | Yes | No | Partially | Yes | 7.5 |
| [53] | Yes | Yes | Yes | Yes | Partially | Yes | No | No | Yes | 6.5 |
| [54] | Yes | Yes | Partially | Yes | Partially | Partially | Partially | Partially | Yes | 6.5 |
| [55] | Yes | Yes | Yes | Yes | Yes | Partially | No | No | Yes | 6.5 |
| [56] | Yes | Yes | Partially | Yes | Yes | Yes | Yes | Yes | Yes | 8.5 |
| [57] | Yes | Yes | Yes | Yes | Yes | Yes | No | No | Yes | 7.0 |
| [58] | Yes | Yes | Yes | Yes | Partially | Yes | No | Yes | Yes | 7.5 |
| [59] | Partially | Yes | Yes | Yes | Partially | Partially | No | Yes | Yes | 6.5 |
| [60] | Yes | Yes | Yes | Yes | Partially | No | No | Yes | Yes | 6.5 |
| [61] | Yes | Yes | Partially | Yes | Yes | Yes | No | Yes | Yes | 7.5 |
| [62] | Yes | Yes | Partially | Yes | Partially | Partially | Partially | Yes | Yes | 7.0 |
| [63] | Yes | Yes | Partially | Yes | Partially | Yes | Partially | No | Yes | 6.5 |
| [64] | Yes | Partially | Yes | Yes | Partially | Yes | No | Yes | Yes | 7.0 |
| [65] | Yes | Yes | Partially | Yes | Partially | No | Partially | Yes | Yes | 6.5 |
| [66] | Yes | Yes | Yes | Yes | Partially | Partially | No | Yes | Yes | 7.0 |
| [67] | Yes | Partially | Partially | Yes | Yes | Yes | No | Yes | Yes | 7.0 |
| [68] | Yes | Yes | Yes | Yes | Partially | Partially | Yes | No | Yes | 7.0 |
| [69] | Yes | Yes | Partially | Yes | Partially | Yes | No | Yes | Yes | 7.0 |
| [70] | Yes | Yes | Yes | Yes | Partially | Yes | No | Partially | Yes | 7.0 |
| [71] | Yes | Yes | Yes | Yes | Yes | Yes | Partially | Partially | Yes | 8.0 |
| [72] | Yes | Yes | Partially | Yes | Partially | Partially | No | Yes | Yes | 6.5 |
| [73] | Yes | Partially | Partially | Yes | Yes | Yes | No | Yes | Yes | 7.0 |
| [74] | Partially | Yes | No | Yes | Yes | Yes | No | Yes | Yes | 6.5 |
| [75] | Yes | Yes | No | Yes | Partially | Yes | Yes | No | Yes | 6.5 |
| [76] | Yes | Yes | Yes | Yes | Yes | Yes | Partially | No | Yes | 7.5 |
| [77] | Yes | Yes | Yes | Yes | Yes | Yes | Yes | No | Yes | 8.0 |
| [78] | Yes | Yes | Yes | Yes | Partially | Yes | No | No | Yes | 6.5 |
| [79] | Partially | Yes | No | Yes | Yes | Yes | No | Yes | Yes | 6.5 |
| [80] | Yes | Yes | Partially | Yes | Yes | Yes | No | No | Yes | 6.5 |
| [81] | Yes | Yes | Partially | Yes | Yes | Yes | Partially | Yes | Yes | 8.0 |
| Robotics Competitions | References Where It Was Found |
|---|---|
| Robot World Cup Initiative—RoboCup | [3,4,6,8,10,17,24,26,28,29,32,35,36,37,38,39,43,44,47,48,49,51,59,65,66,67,76,79,81] |
| World Robot Summit (WRS) | [59,75,80] |
| Agile Robotics for Industrial Applications Competition (ARIAC) | [77] |
| Mohamed Bin Zayed International Robotics Competition (MBZIRC) | [1] |
| e-Yantra Robotics Competition (eYRC) | [34,45,69,71,78] |
| Micromouse | [3,60,70] |
| Robot@Factory competition/Robot@Factory Lite competition | [5,40,41,46,63,67] |
| MicroFactory | [41,46] |
| RoboParty | [70] |
| Portuguese Robotics Open | [70] |
| Bot Olympics | [70] |
| Firefigher Robot | [70] |
| Robot Competitions Kick Innovation in Cognitive Systems and Robotics (RoCKIn) Competition | [36,37,44,48,59,67] |
| Student Autonomous Underwater Vehicles Challenge-Europe (SAUC-E) | [2,39,53,62,67,73] |
| An Outdoor Robotics Challenge for Land, Sea and Air (EURATHLON) | [2,33,39,44,53,54,62,67,73] |
| The European Robotics League (ERL)/ERL Emergency | [53,54,59,66,67,74] |
| DARPA Robotics Challenge | [3,4,8,27,28,32,33,35,36,39,44,53,59,62,65,66] |
| FIRA HuroCup | [24,65] |
| IEEE Humanoid application challenge | [65] |
| Amazon Picking Challenge (APC) | [59] |
| European Robotics Challenge (EuRoC) | [59] |
| International Aerial Robotics Competition (IARC) | [28,49,56] |
| IROS Robotic Grasping and Manipulation Competition | [59] |
| Balam Robot Competition | [61] |
| National Robotics Competition in Guatemala | [61,72] |
| Freescale Cup | [61] |
| FIRST Lego League (FLL)/FIRST Robotics Competition/FIRST Technology Challenge | [3,4,8,9,10,18,22,29,32,39,42,43,50,52,55,58,72] |
| 4-H Robotics | [50] |
| Mississippi BEST (MSBEST) Robotics | [50] |
| VEX Robotics Competition | [32,39,64] |
| World Robot Olympiad (WRO) | [4,8,10,29,43,55] |
| Brazilian Robotics Olympiad | [42] |
| European Land Robot Trial (ELROB) competition | [27,28,33,39,44,62] |
| SpaceBot Cup—a German robotics competition | [44] |
| BotBall | [4,8,10,29] |
| Australian Multi Autonomous Ground-Robotic International Challenge (MAGIC) | [27,37] |
| Defense Advance Research Projects Agency Robotics Challenge | [37] |
| National Instruments Autonomous Robotics Competition (NIARC) | [32] |
| RoboWaiter | [25,31] |
| Trinity College Fire-Fighting Home Robot Contest (TCFFHRC) | [25] |
| British MoD Grand Challenge | [27] |
| Robotic Day Like Follower Competition | [68] |
| EUROBOT | [20,30] |
| Cybertech | [20,21] |
| CiberMouse@RTSS08 | [23] |
| Indoor Aerial Robot Competition | [19] |
| AAAI Mobile Robot Competition and Exhibition | [66] |
| “Schüler bauen Roboter” program | [57] |
| Urban Search and Rescue (USAR) | [33,39] |
| Humanitarian Robotics and Automation Technology Challenge(HRATC) | [35] |
| Robomagellan | [7] |
| RoboParty | [3] |
| Latin American IEEE Robotics Competition | [17] |
| Robosub | [73] |
| MATE ROV | [73] |
| Microtransat Challenge | [73] |
| SailBot | [73] |
| Underwater robot competition | [73] |
| RoboBoat | [73] |
| World Robotics Sailing Championship | [73] |
| SeaPerch | [73] |
| Students Autonomous Underwater Vehicle (SAVe) | [73] |
| Oceanology International (OI) China | [73] |
| Maritime RobotX Challenge | [73] |
| Shell Ocean Discovery XPRIZE | [73] |
| Virtual RobotX | [73] |
| METRICS | [73] |
| Robotics Competitions | ||
|---|---|---|
| Agile Robotics for Industrial Applications Competition (ARIAC) | Description | It is an annual competition organized by the NIST (National Institute of Standards and Technology) since 2017. The main goal is to test the agility of industrial robot systems and to enable industrial robots on shop floors to be more productive, autonomous and to require less time from shop floor workers [77]. |
| Where it takes place | This topic was not found in the papers. | |
| Target public | Researches to practitioners. | |
| Challenges and activities | Participants needs to implement a robot control system for a robot to overcome agility challenges in a simulated environment. The robot needs to realize kitting tasks, building the kits by picking up all the required items, which can be found on shelves, on the conveyor belt or in bins. | |
| Technologies applied | Gazebo (open source robotics simulation environment) and ROS—Robot Operating System. | |
| Application area | This kind of competition can contribute to the development of robotics applications for the manufacturing industry, realizing repetitive tasks, decreasing the human errors and allowing robots to work in areas inaccessible for humans. | |
| An Outdoor Robotics Challenge for Land, Sea and Air (EURATHLON) | Description | It is a competition funded by European Union and coordinated by the University of the West of England. The main aim of euRathlon was to propose teams from academia and industry real world challenges testing the intelligence and autonomy of outdoor robots in scenarios inspired by the 2011 Fukushima accident [2,33,39,53,54,62,73]. |
| Where it takes place | First land competition: 2013 in Berchtesgaden, Germany. Second sea competition: 2014 in La Spezia, Italy. The final euRathlon Grand Challenge (air, land and sea): 2015 in Piombino, Italy. | |
| Target public | Teams from academy, company and industry. | |
| Challenges and activities | Challenges for autonomous robots of different domains (air, sea and land) in scenarios inspired by the 2011 Fukushima accident. In 2013 Eurathlon coordinates a robotic competition based on land and on the next year based on sea. The third year is the Grand Challenge, where the robots of three domains (land, sea and air) needs to cooperate in order to achieve objectives in a scenario set up to simulate a nuclear power plant ravaged by a tsunami. The scenario was based on the Fukushima disaster. The Grand Challenge is composed of three missions: localizing two missing workers in the disaster area, surveying the area of disaster to identify dangerous leaks and finally closing valves inside the building and underwater to stem the leaks. Three days of the competition are to practice and the grand challenge is the last two days. | |
| Technologies applied | This topic is not discussed in the articles. | |
| Application area | This kind of competition can contribute to increase the state of the art on the air, land and sea autonomous robots to help in natural disasters. | |
| Balam Robot Competition (BRC) | Description | It is a local robotics competition in Guatemala started in 2015. The main objective is to show that technology is not complicated and mathematics or science are not boring for students [61]. |
| Where it takes place | Outreach Department of Universidad Galileo. | |
| Target public | Students. | |
| Challenges and activities | They prepare six weeks having workshops of four hours per week. The main challenge of BRC 1.0 was to build a sumorobot, teams had to compete by rounds against other sumobots and those who remained inside the tatami where who remain as finalists. After various rounds a winner was determined. | |
| Technologies applied | 3D printing. | |
| Application area | This competition can contribute to education. | |
| Brazilian Robotics Olympiad (BRO) | Description | It was started in 2007, created by a team of several university professors with the mission of promoting robotics among brazilian students with or without previous knowledge of robotics, fostering their interest to engage in science, technology and engineering studies and carrers. The olympiad is fully free for participants, being annually organized by volunteers from several brazilian universities [42]. |
| Where it takes place | Brazil. | |
| Target public | Students. | |
| Challenges and activities | The activities are divided in two modalities, practical and theoretical. The theoretical exams are designed to give the knowledge and contextualization about robotics, six levels of written tests are prepared by the organizers and based on the age of students. This model allows students to realize that what they are learning at school can be applied to solve real world problems. The practical exams are based on RoboCup Junior—Rescue mission. There is a simulated disaster environment where teams of four participants must build a robot fully autonomous to rescue victims. The robot must follow a safe path, avoid debris, overcome gaps, go over a mountain, identify victims and rescue them, taking them to a safe place. The best teams are selected by the Brazilian RoboCup Committee to represent Brazil in the RoboCup Junior international competition. | |
| Technologies applied | Arduino kits. | |
| Application area | Robotics competition has been an exciting and motivational tool for helping students to learn how to solve real problems in a practical way. It has been a good contribution for education. | |
| CiberMouse @RTSS08 | Description | It is a robotics simulation competition [23]. |
| Where it takes place | The competition took place remotely. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | The simulation system creates a virtual arena with obstacles, a starting grid, a target area and the bodies of the robots. The bodies are composed of a circular base and are equipped with sensor, actuator and command buttons. The participants must create a software which controls the movements of a team composed of five virtual robots. | |
| Technologies applied | Robot simulators. | |
| Application area | This topic was not found in the papers, but it can be concluded that this kind of competition can contribute to the development of virtual solutions, also for education and dissemination of technology areas through students. | |
| Cybertech | Description | It is a robotic competition organized anually by the Universidad Politécnica de Madrid (UPM) started in 2001 [21]. |
| Where it takes place | Madrid, Spain. | |
| Target public | Undergraduate students from universities all around the world. | |
| Challenges and activities | The students have to design and build a robot that participates in different events. The events include: Maze event (robot have to get out of a maze in a minimum time), line-following event (robot must follow a black line over a white back-ground), solar cars event (participants have to build an autonomous device that should be able to move inside a circuit being propelled just by solar energy), simulated robots event (participants have to develop a computer program to control a virtual robot that moves in a simulated maze) and bullfighting event (each team has to build a bullfighter robot that fights in the arena against a bull robot provided by the organization). | |
| Technologies applied | This topic was not discussed in the papers. | |
| Application area | This competition can contribute to the field of education, increasing the motivation of them towards engineering domains. | |
| DARPA Robotics Competition | Description | It is an industrial competition focused on autonomous vehicles, which has prize money [3,4,27,33,35,39,53,59,62,66]. |
| Where it takes place | This topic was not found in the papers. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | Includes several manipulation tasks. First editions have the objective of promote autonomous driving of road vehicles and then in the others editions promote humanoid robots able to execute complex tasks and in the last editions the focus was to promote the development of adaptive vehicles for military purposes. Started as a competition for autonomous cars and recently a simulated challenge focusing on humanoid robotics using Gazebo. | |
| Technologies applied | Gazebo. | |
| Application area | Robotic competitions are important in the learning process of youngsters and it is becoming more and more usual in schools and universities last few years. The competitions can contribute to several areas, like industry, society, search, but one of the most are benefited has been education. | |
| e-Yantra Robotics Competition (eYRC) | Description | It is an annual competition organized by e-Yantra and hosted at IIT Bombay. The objective is to teach robotics concepts to the college students using a Project Based Learning (PBL). The competition is totally online [34,45,69,71,78]. |
| Where it takes place | Indian Institute of Technology Bombay—India. | |
| Target public | College students of Indian Institute of Technology Bombay. | |
| Challenges and activities | The competition is divided in different stages. Firstly, there is a preliminary test where participants answer questions related to aptitude, programming and electronics knowledge. In Stage 2 the participants combine the software and hardware parts to find the best solution, it also involves hardware testing, video and code submission. Each stage is subdivided into small tasks. In 2018 it was introduced a theme called “Thirsty Crow”, which aims to teach “Marker Based Augmented Reality”, for the first time. The teams need to build a robot (called Crow) capable of autonomously following the line and pick up the magnetic pebbles and drops them at the water pitcher marker. They also have to design and construct a 3D model of pebbles, water pitcher and Crow in Blender. They also have to write a python script related to the augmented reality part. | |
| Technologies applied | Marker based augmented reality using open source python libraries such as OpenCV and OpenGL; 3D modeling using blender software; ros; machine learning; image processing; microcontroller programming. | |
| Application area | This kind of competition can contribute to education, increasing the students’ interest in STEAM areas and robotics. | |
| EUROBOT competition | Description | It is an international amateur robotics contest, organized by the Eurobot Association and founded in May 2004, but the contest was introduced already in 1998 [20,30]. |
| Where it takes place | Annually somewhere in Europe. | |
| Target public | Young engineering students. | |
| Challenges and activities | During a match, two opponents robots are competing on the table for 90 seconds, each robot is performing tasks defined in the rules. The robots must be autonomous and a robot should not collide with other opponent, if this happens the team is disqualified. The winner is the robot that collect more points. In the Eurobot 2010 edition the robot must collect fruits and vegetables, represented by balls and cylinders. In the Eurobot 2011 edition two mobile robots must play a “chess up”, the game is played on a playing table of the usual Eurobot size. | |
| Technologies applied | 3D printing. | |
| Application area | The main application area is education. | |
| European Land Robot Trial (ELROB) | Description | It was founded in 2006 by the European Robotics Group and organized by the Fraunhofer Institute for Communication, Information Processing and Ergonomics [27,33,39]. |
| Where it takes place | Annually at changing locations throughout Europe. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | The ELROB alternates between military and civilian and defines a variety of scenarios instead of only one single mission. These tasks include: security missions, convoying or reconnaissance by day and night. The team can choose between the alternative scenarios. The scenarios also include detection of objects and transportation, which can be carried out with a single vehicle or a convoy with at least two vehicles. | |
| Technologies applied | 2D and 3D laser scanner, 3D Lidar sensor, cameras, GPS and inertial sensors. | |
| Application area | Provides an opportunity to exchange ideas, create solutions as well as a venue to evaluate and encourage state of the art research. This competition can be helpful for the members of teams because they are forced to work together in a determined time, contributing to education field. | |
| European Robotics League (ERL)/ ERL Emergency | Description | It is a multidomain robotic competition funded by the European Union Horizon 2020 Programme, which is focused on two indoor robotics competitions (ERL Industrial and ERL Service Robots) and one outdoor robotic competition (ERL Emergency Robots). The 2017 ERL Emergency competitions require flying, land and marine robots acting together to survey the disaster [53,54,66,74]. |
| Where it takes place | Many countries over Europe. | |
| Target public | This topic is not discussed in the papers. | |
| Challenges and activities | The competition has a duration of 9 days and the robots has to perform tasks related to land, air and sea domains which emulate real-world situations inspired by the 2011 Fukushima accident. The missions include: Mission A: Search for missing workers. Mission B: Reconnaissance and environmental survey. Mission C: Pipe inspection and stemming the leak. Robots have to work in a catastrophic scenario. From a starting point, the vehicle had to submerge, pass through the gate and it was then required to perform different tasks without resurfacing. The tasks include inspecting and mapping the area and the objects of interest, identifying mission targets, such as the leaking pipe and the missing worker. | |
| Technologies applied | Cloud resource and 4G connection. | |
| Application area | This kind of competition can contribute to increase the state of the art on the air, land and sea autonomous robots to help in natural disasters. | |
| FIRA HuroCup | Description | It is a multi-event robot athletic competition intended to encourage breath in humanoid performance [24,65]. |
| Where it takes place | First edition in Seoul, Korea. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | HuroCup is part of the FIRA international robotic competition and consists of robot dash, penalty kicks, lift and carry, basketball, weightlifting, climbing wall and obstacle run, the robot with the best score over all events is the winner. | |
| Technologies applied | This topic was not found in the papers. | |
| Application area | This topic was not found in the papers. | |
| FIRST Robotics Competition/ FIRST Lego League (FLL) | Description | It is an international competition which began in 1998 as a joint effort between the FIRST (For Inspiration and Recognition of Science and Technology) Organization and the LEGO Group to introduce robotics to students. The competition has a duration of six weeks. The Lego League is designed for young ages [3,4,9,18,22,29,50,52,58]. |
| Where it takes place | In different countries around the world. | |
| Target public | High school and university students, engineers, technicians, business, leaders and concerned citizens. Lego League: students from 9 to 14 years old. | |
| Challenges and activities | Teams design and build tele-operated mobile robots to achieve a variety of tasks. In the Lego League they have to use LEGO kits to work on an authentic scientific-themed challenge, the themes include climate change, senior solutions, food safety, medicine, moving across a field, climbing ramps, hanging from bars and placing objects in goals. Each year, there is a new theme. The tasks first allow students to connect what they learn about robotics to what they could do in the face of real-world challenges and second, authentic tasks and plausible scenarios are structured to motivate students to overcome potential challenges in learning robotics. | |
| Technologies applied | LEGO Mindstorms, LabView software, sensors. | |
| Application area | This competition can connect students with professionals, enable them to solve real-world problems and develop 21st century skills. Robotic competitions have been a good tool for education because it aids universities to teach a variety of multidisciplinary engineering topics including design, programming and mechatronics. | |
| Humanitarian Robotics and Automation Technology Challenge (HRATC) | Description | It is a humanitarian demining international robotics competition, which the goal is to push boundaries of what technology can accomplish in this field. The first edition happened in 2014 [35]. |
| Where it takes place | The entire competition is performed remotely. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | The competition is divided in three stages: The simulation stage: teams must focus on their ideas and to develop their algorithms. The teams have to focus on the actual problem, humanitarian demining. The field trials stage: in this stage each team will be able to run the software developed on the simulator on the actual robot, each team has 3 field trials, throughout 3 weeks. Competition day: each team is given two runs on a minefield using surrogate mines and false positives. | |
| Technologies applied | Gazebo simulator, TeamBots simulator, ROS and USARSim simulador. | |
| Application area | The main contribution of this competition is to increase the state of the art in the area of humanitarian demining. | |
| IEEE Humanoid application challenge | Description | The 2019 theme was robot magic [65]. |
| Where it takes place | This topic was not found in the papers. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | In the robot magic theme a humanoid robot can take on any role in a magic show. | |
| Technologies applied | OpenCV (image processing) and PocketSphinx (speech recognition). | |
| Application area | Provides opportunity for improving work in robotics and a large range of areas of artificial intelligence (vision, speech understanding, interacting with humans). | |
| Indoor Aerial Robot Competition | Description | It was inaugurated in May 2005 with the objective to identify best design practices and gain insight on technical challenges facing the development of unmanned air vehicles [19]. |
| Where it takes place | Swarthmore College. | |
| Target public | This topic was not found in the paper. | |
| Challenges and activities | The tasks are based on line-following and teleoperation. The teams have to implement a line-following algorithm in real time which is invariant to changing lighting conditions. The points are based on how far the robots are able to travel. | |
| Technologies applied | This topic was not found in the paper. | |
| Application area | It has been a means of discovering the best practices to solve real world problems. | |
| International Aerial Robotics Competition (IARC) | Description | It is an international competition focused on aerial robots [49,56]. |
| Where it takes place | This topic is not found in the papers. | |
| Target public | This topic is not found in the papers. | |
| Challenges and activities | In this competition the agent (aerial robot) is required to contact targets (ground vehicles) sequentially and drive them to a certain boundary to earn score. The agent robot needs to be fully autonomous and the game has a duration of 10 min. In the IARC mission 7 called “Shepherd mission”, there is a drone, 10 ground mobile robots and 4 mobile obstacles. First, the drone should be able to avoid collision with four mobile obstacles. Second, there are two ways to change the moving direction of each ground mobile robot. The final target of winning the competition is to drive at least 4 out of the 10 ground mobile robots across the green edge of the square arena within 10 min. | |
| Technologies applied | This topic is not found in the papers. | |
| Application area | This topic is not found in the papers. | |
| Latin American IEEE Robotics Competition | Description | It is an annually competition organized by the Department of Electrical Engineering of the Universidad de Chile and by the IEEE region 9 [17]. |
| Where it takes place | The first was held in Santiago—Chile. | |
| Target public | Engineering students. | |
| Challenges and activities | The first competition (“beginners”) was aimed for students to work in robotics and was based on Lego MindStorms building blocks, the proposed challenge is to design and programming a robot that cross a simulated minefield. The second competition (“advanced”) is designed for experienced students’ groups and consists of crossing a soccer field with obstacles using any kind of legged robots, the robots could be designed by participants, or could be bought or even adapted. | |
| Technologies applied | LEGO MindStorms. | |
| Application area | The main contribution is for the area of education. | |
| MicroFactory | Description | It is a robotic competition designed to be low-cost and easily implementable in a small space and it is based on the Portuguese competition called Robot@Factory [41,46]. |
| Where it takes place | This topic was not found in the papers. | |
| Target public | High school students and university undergraduate students. | |
| Challenges and activities | The challenges are similar to the Robot@factory challenges but the ground area and complexity is reduced and the scenario material were simplified. In MicroFactory there are just 3 rounds. | |
| Technologies applied | 3D printing, Arduino, odometry and sensors. | |
| Application area | The main contribution of this competition is for education. | |
| Micromouse | Description | It is one of the most popular competitions inside the context of mobile robots started in 1970s, being the first competition promoted by the IEEE. It is organized at the University of Trás-os-Montes e Alto Douro [3,60,70]. |
| Where it takes place | Editions are held worldwide. | |
| Target public | Students, researches and the general public. | |
| Challenges and activities | A small autonomous mobile robot put in an unknown labyrinth must be able to map it, look for the best possible route between the starting point and the goal and travel it in the shortest time. The challenge is not solving the maze but how fast the robot can do it. | |
| Technologies applied | Scanning and path planning algorithms, fFloodfill procedure, HIL simulator, self-localization using odometry and distance sensors. | |
| Application area | The Micromouse competition is an important tool for the education, increasing the young students’ interest in STEAM but to introduce other people to the field of robotics. | |
| Mississippi BEST (MSBEST) robotics | Description | It is a competition which has a mission to inspire students to pursue careers in STEM areas through robotic design and competition. [50]. |
| Where it takes place | Mississipi—USA | |
| Target public | Middle and high school students. | |
| Challenges and activities | The challenge has a duration of six weeks. The participants are supplied with kits of material and they have to put those material together to build a robot, participants have to do a search about the competition theme for that particular year, realize a brainstorm with the ideas on how to design the robot to perform tasks related to the theme. All the students are required to submit their notebook, team demographics and consent forms. | |
| Technologies applied | This topic is not discussed in the papers. | |
| Application area | The main application area is education. | |
| Mohamed Bin Zayed International Robotics Competition (MBZIRC) | Description | It is an international robotics competition [1]. |
| Where it takes place | This topic was not found in the papers. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | The Challenge 1 of the MBZIRC competition consists of aerial drone interception scenario. First, there are fixed balloons randomly around the arena and the autonomous aerial system must automatically detect, get close and blow up. Second, another autonomous aerial system should capture a ball that is suspended from another drone that flies at high speed on a variety trajectory. All these tasks must be performed autonomously. | |
| Technologies applied | Time-of-flight cameras, machine learning, computer vision and Kalman filters. | |
| Application area | This competition can contribute to increase the state of the art in autonomous vehicles and drones, which has been attracting a lot of attention, for example, for urban air mobility (UAM). | |
| National Instruments Autonomous Robotics Competition (NIARC) | Description | It is a competition started in 2012 and its focus on fully autonomous robots to complete a given theme challenge. These themes have included search and rescue, mining and agriculture [32]. |
| Where it takes place | Universities across Australia and New Zealand. | |
| Target public | Students. | |
| Challenges and activities | In NIARC 2012 the theme was search and rescue, where teams have to develop a robot to navigate a grid based maze environment. The objective is the robot navigate in unknown maze and differentiate the victims. NIARC’s 2013 theme was the mining industry, where the objective was the robot navigate to the mining area through the unknown entrances and differentiate the desired gold cubes and undesired grey rubble cubes. NIARC’s 2014 theme was the agriculture industry and the objective is the robot navigate accurately to known but unmarked seeding areas to plant seeds. | |
| Technologies applied | Real time control, FPGA, LabView. | |
| Application area | Studies have shown the benefits of using robotics competitions to generate interest and motivation in studying engineering for high school students and general public. Besides that it can also contribute to develop the ability of the teams to work together in multidisciplinary work. | |
| RoboCup | Description | It is an international competition which runs by the RoboCup Federation and the goal is: “By the year 2050, a team of fully-autonomous humanoid robot soccer players shall win a soccer game, complying with the official FIFA rules, against the winner of the most recent World Cup of Human Soccer” [4,6,8,10,17,26,28,29,36,43,47,48,49,51,59,76,79,81]. |
| Where it takes place | The first edition took place in Nagoya, Japan and now the competition take place in many countries all over the world annually. | |
| Target public | Since senior participants like researchers and university students to hobbyists, high school, primary and secondary students. | |
| Challenges and activities | There are different leagues: Junior: for young students. There are three ages categories and three leagues being them soccer, rescue and dance. This league keeps the same activities over the years to help students improving their solutions. Soccer game: teams with autonomous robots compete each other in a soccer game; Search and rescue: robots that can assist first responders in mitigating a disaster such as an earth-quake or an accident in an industrial environment; Home: service robots to realize household activities; Work: defines nine challenges inspired by industrial mobile manipulation and transport tasks; Logistics League: groups of three robots have to plan, execute and optimize the material flow and deliver products according to dynamic orders in a simplified factory; Humanoid Challenge: humanoid robots compete in three events: walking, penalty kicks and a free demonstration; Simulation 2D and 3D: two teams of eleven software agents compete against each other on a simulated soccer pitch; Small size: semi-autonomous soccer robots (diameter of 18 cm and height of up to 15 cm); Middle size: slow driving robots (that drive up to 4m/s) on small soccer fields enclosed by walls; Standard Platform: soccer game in which all teams compete with identical robots. | |
| Technologies applied | Sensor, actuators, AI solutions, machine learning, multi-agent coordination, ROS, SLAM, image processing, wireless standard communication interfaces, LEGO Mindstorms, object recognition, speech recognition and gesture recognition. | |
| Application area | How the competition includes several leagues the application area can be more than one, increase the state of the art in the leagues areas, attract more students to STEM concepts contributing to education through RoboCup Junior and also increase the development of solutions for industry, daily life and natural disasters like RoboCup Home, Logistics League and Search and Rescue. | |
| Robomagellan | Description | It is an outdoor navigation competition hosted by RoboGames [7]. |
| Where it takes place | This topic is not discussed in the papers. | |
| Target public | This topic is not discussed in the papers. | |
| Challenges and activities | The competition requires the robot moves in an unconstrained and unstructured real-world outdoor environment with different obstacles. | |
| Technologies applied | ROS, FSM and extended Kalman filter (EKF). | |
| Application area | The robotic competition contributes with the advances in the field of robotics. | |
| Roboparty | Description | It is an educational robotic event with a duration of three non-stop days [3,70]. |
| Where it takes place | Universidade do Minho, Guimarães, Portugal | |
| Target public | School-age children. | |
| Challenges and activities | The students learn by experience how to build the Bot’n Roll robotic platform (mechanics, soldering electronics components and assembling the parts). Then, three challenges are executed to test their robots and the developed algorithms. | |
| Technologies applied | This topic is not discussed in the papers. | |
| Application area | The main application is education. | |
| Robosub | Description | It is the first AUV competition and the first edition was in 1997. Currently it is the most popular competition in the AUV world and every year the competition has a different theme [73]. |
| Where it takes place | USA. | |
| Target public | Students (high school and university) | |
| Challenges and activities | The AUV mission consists of passing a gate, touching a buoy, dropping and retrieving objects and launching a plastic marker inside a target hole. | |
| Technologies applied | This topic was not found in the papers. | |
| Application area | The main application area is education. | |
| RoboWaiter | Description | The first robot competition in the area of assistive robotics, it is conducted in conjunction with the annual international Trinity College Fire-Fighting Home Robot Contest (TCFFHRC) in 2009. The vision of the competition is: bringing people with disabilities as clients of RoboWaiter design and Integrating the RoboWaiter project in a robotics course [25,31]. |
| Where it takes place | Hartford, Connecticut | |
| Target public | Traditional participants are students, hobbyists and engineers. | |
| Challenges and activities | Each robot has three runs and must navigate autonomously from its home position to a scale-model refrigerator, pick up a plate of food from a shelf, navigate to the table where a person with mobility impairment is sitting, places the plate on it and return to home position. Robots must avoid collisions with obstacles (sink, chair and elderly person). | |
| Technologies applied | This topic was not found in the paper. | |
| Application area | Development of solutions based on assistive robots to help people with disabilities realizes activities more easily. Other application area can be the education once the competition encourages students to STEAM areas. | |
| Robot Competitions Kick Innovation in Cognitive Systems and Robotics (RoCKIn) Competition | Description | It aims to provide tools for benchmarking to the robotics community by designing and setting up competitions that increase scientific and technological knowledge. It is inspired by the RoboCup [44,48,59]. |
| Where it takes place | The first was held in Toulouse, France in 2014. The final was held in Lisbon, Portugal in 2015. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | RoCKIn@Work: there is a medium sized factory which produces small to medium sized lots of mechanical parts and assembled mechanical products, the robots must try to optimize its production process to meet the increasing demands of their customers. RoCKIn@Home: the robots must assist a person and supporter quality life, it is based in an apartment with all common household items like windows, doors, furniture and decorations. | |
| Technologies applied | This topic was not found in the papers. | |
| Application area | Robotics competitions have been a good way to promote comparison of different algorithms and systems, allowing for the replication of their results. Robotics competitions also contributes for promoting education and research to push the field forward. | |
| Robotic Day Line Follower Competition | Description | It is an annual competition which has been occurring during the last 15 years and it is growing every year. This competition used topics that can be used as benchmark, comparing different performances [68]. |
| Where it takes place | Prague, Czech Republic. | |
| Target public | This topic is not discussed in the article. | |
| Challenges and activities | The participants’ robots must to run in a way and follow a black line. They need to pass obstacles and the robot that complete the route in the shortest time qualify for the finale. In the final round the races are held on a knock-out. | |
| Technologies applied | Time of flight distance sensor and computer vision. | |
| Application area | In this competition context it is possible to apply the activities in multidisciplinary approach contributing to education. It can also have an importance in research and development, because the outcomes can be applied to solve real world problems, for example, in manufacturing and service robots. | |
| Robot@Factory Robot@Factory Lite | Description | It is an annually competition started in 2011 recently included in Robotica, the main Portuguese Robotics Competition. Robot@Factory Lite is a simplified version. The goal is to stimulate students and researchers to develop solutions to the challenges proposed by them [5,40,41,46,63,67]. |
| Where it takes place | Portugal. | |
| Target public | Secondary school and universities students. | |
| Challenges and activities | The competition deal with the problem of the transportation of materials inside a factory. The main idea is an AGV organize the materials in warehouses with processing machines. There are four warehouses with two machines, the robot must deliver the parts in their correct locations. The AGV must be fully autonomous. The competition is divided in three days, each day has a round. | |
| Technologies applied | SimTwo simulator, which is provided by the competition and hardware in the loop (HIL), a software where the competitors insert their microcontroller in the loop of the simulation. | |
| Application area | The main application area is education. | |
| “Schüler bauen Roboter” program | Description | “Schüler bauen Roboter” is a German project that brings together schools and universities [57]. |
| Where it takes place | Technical University of Munich, Germany. | |
| Target public | Target group is 14 to 18 years old high school students. | |
| Challenges and activities | In the first school year the students can build a robot that solve a given task and at the end of the year, the different groups can compete against each other. Usually the competition starts in September, when the school year begin. | |
| Technologies applied | This topic was not found in the paper. | |
| Application area | The main application area is education, once the competition was created to take place inside a university to help them to encourage students in the STEM areas and get skills in programming, electronics, robotics, etc. | |
| SICK robot day | Description | It is a bi-annual competition hosted by SICK AG, a producer of sensor systems [38]. |
| Where it takes place | Waldkirch, Germany. | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | The robots must navigate autonomously and avoid obstacles and collision with other robots. The goal is to deliver as many objects as possible, where each correctly delivered object was awarded one point and each erroneous delivery one penalty point. With a limit time of 10 min, each robot had to alternately collect labelled objects at filling stations and transport them to delivery stations based on the object label. | |
| Technologies applied | This topic was not found in the papers. | |
| Application area | This topic was not found in the papers. | |
| SpaceBot Cup | Description | It is a German robotics competition started in 2013. The second edition occurred in 2015. The main of the competition is to accomplish (conclude, finish) this activity as autonomous as possible by means of unmanned vehicles. The focus is mobile manipulation for planetary exploration [44]. |
| Where it takes place | Germany. | |
| Target public | Universities, research institutes and subject matter experts (SMEs). | |
| Challenges and activities | SpaceBot has only one scenario which involves typical exploration tasks carried out on a planetary surface after landing on a planet. The robots have to locate and identify objects in a complex terrain. The target objects needs to be conveyed (transmitted) to a base station. The robots needs to be autonomous, communication was only allowed through a shaped network connection that imposed restrictions on the ports used. The tasks to be accomplished were: explore and map the terrain, find artificial objects, collect the two objects and bring them to a third and finally return to landing site. | |
| Technologies applied | This topic was not found in the paper. | |
| Application area | This topic was not found in the paper. | |
| Student Autonomous Underwater Vehicle Challenge- Europe (SAUC-E) | Description | It is the first underwater robotics competition in Europe. SAUC-E started in 2006 in the UK and then has been hosted by CMRE since 2010, the main goals are: advance the state of art of AUV, promote creative environment among researches, get closer contact between the university teams and companies invited to participate [2,53,62,73]. |
| Where it takes place | In many countries around Europe. | |
| Target public | University students. | |
| Challenges and activities | The typical tasks includes passing through the gate, mapping and inspecting an underwater pipeline structure, localizing on the seafloor a pinger that emit an acoustic wave and localizing underwater buoys and objects. The task must be done totally autonomous by the robot. | |
| Technologies applied | This topic was not found in the papers. | |
| Application area | The main application area is education. | |
| VEX Robotics Competition | Description | It is a competition which aim to engages participants from elementary through university students in learning about STEM concepts. This competition was launched in 2005 and today it is one of the largest extracurricular robotics program in the world [32,39,64]. |
| Where it takes place | The place is not discussed in the articles. | |
| Target public | Middle school, high school and university students. | |
| Challenges and activities | This topic was not found in the papers. | |
| Technologies applied | This topic was not found in the papers. | |
| Application area | The main application area is education. | |
| World Robot Olympiad (WRO) | Description | It was founded in 2004 and the initial mission is: to bring together young people all over the world to develop their creativity, design and problem solving skills through challenging and educational robot competitions and activities [4,55]. |
| Where it takes place | This topic is not discussed in the papers. | |
| Target public | Students. | |
| Challenges and activities | There are three categories: regular category (the robots complete tasks and it is open for 13–15 years), open category (build a robot model) and football category (teams build two robots who compete against another team’s robots in a robot football match). The theme of the 2018 edition was “Precision Farming” requires the students to design a robot which is able to plant different coloured seedlings in the corresponding farm areas. | |
| Technologies applied | LEGO Mindstorms. | |
| Application area | The main application area is education. | |
| World Robot Summit (WRS) | Description | It is an international competition started in October 2018, organized by the Japanese government to accelerate research and development of robots in the areas of daily life, society and industry in order to promote a world where humans and robots successfully live and work together [59,75]. |
| Where it takes place | Tokyo, Japan | |
| Target public | This topic was not found in the papers. | |
| Challenges and activities | The leagues: rescue, service and assembly. Service: the tidy up here task consists of moving objects from incorrect positions to the right positions. There are four rooms, children, dining, kitchen and a living room. There are two types of objects, 45 known units and 10 unknown units. Assembly: aims to develop robots to allow the assembly of complex systems with varied products. There some tasks like task board, kitting, assembly and surprise assembly. | |
| Technologies applied | Simultaneous localization and mapping (vSLAM), vision system (TensorFlow). | |
| Application area | The competition can contribute to development of novel solutions, providing a benchmark for robot assistance, not only for disabled people but also for elderly people and healthy people, by assisting daily housekeeping tasks. Can also contribute to the manufacture industry developing solution to assembly products. | |
| Robotics Competitions | Simulation | Control | Localization and/or Mapping | Obstacle Avoidance | Prototyping | Computer Vision | Navigation | Artificial Intelligence |
|---|---|---|---|---|---|---|---|---|
| ARIAC | [77] | [77] | [77] | [77] | [77] | [77] | ||
| EURATHLON | [2,33,39,53,54,62,73] | [2,33,39,53,54,62,73] | [2,33,39,53,54,62,73] | [2,33,39,53,54,62,73] | [2,33,39,53,54,62,73] | |||
| BRC | [61] | [61] | ||||||
| BRO | [42] | [42] | [42] | [42] | [42] | [42] | ||
| Cibermouse | [23] | [23] | [23] | [23] | ||||
| Cybertech | [21] | [21] | [21] | [21] | ||||
| DARPA | [3,4,27,33,39,53,59,62,66] | [3,27,33,35,39,53,59,62,66] | [3,27,33,35,39,53,59,62,66] | [3,27,33,35,39,53,59,62,66] | [3,27,33,35,39,53,59,62,66] | [3,27,33,35,39,53,59,62,66] | ||
| eYRC | [34,45,69,71,78] | [34,45,69,71,78] | [34,45,69,71,78] | [34,45,69,71,78] | ||||
| EUROBOT | [20,30] | [20,30] | [20,30] | [20,30] | [30] | [20,30] | ||
| ELROB | [27,33,39] | [27,33,39] | [27,33,39] | |||||
| ERL | [53,54,66,74] | [53,54,66,74] | [53,54,66,74] | [53,54,66] | [53,54,66,74] | |||
| FIRA HuroCup | [24,65] | [24] | [65] | [65] | ||||
| FIRST | [3,4,9,18,22,29,50,52,58] | [3,4,9,18,29,50,52,58] | [3,4,9,18,29,50,52,58] | |||||
| HRATC | [35] | [35] | ||||||
| IEEE Humanoid application challenge | [65] | [65] | [65] | |||||
| Indoor Aerial Robot Competition | [19] | [19] | ||||||
| IARC | [56] | [49] | ||||||
| Latin American IEEE | [17] | [17] | [17] | |||||
| Microfactory | [41] | [41,46] | [41,46] | |||||
| Micromouse | [3,60] | [3,60] | [3,60] | [3,70] | ||||
| MSBEST | [50] | [50] | ||||||
| MBZIRC | [1] | [1] | [1] | [1] | ||||
| NIARC | [32] | [32] | [32] | |||||
| RoboCup | [4,6,8,17,29,43,47,48] | [4,6,8,10,17,26,28,29,36,43,47,48,59] | [4,6,8,17,26,28,29,36,43,47,48] | [4,6,8,17,28,29,43,47,48] | [4,6,8,10,17,29,36,43,47,48] | [4,6,8,17,26,28,29,43,47,48] | [4,6,8,17,29,43,47,48] | [4,6,8,17,26,28,29,43,47,48,49,51,76,79,81] |
| Robomagellan | [7] | [7] | [7] | [7] | ||||
| Roboparty | [3,70] | [3,70] | ||||||
| Robosub | [73] | [73] | [73] | |||||
| RoboWaiter | [25,31] | [25,31] | [25,31] | [25,31] | [25,31] | [25,31] | ||
| RoCKIn | [44,48,59] | [44,48,59] | [44,48,59] | |||||
| Robotic Day | [68] | [68] | [68] | [68] | ||||
| Robot@ Factory | [5,40,41,46,63,67] | [5,40,41,46,63,67] | [5,40,41,46,63,67] | [5,41,46,63,67] | [41,46,63,67] | [5,40] | ||
| “Schüler bauen Roboter” | [57] | [57] | ||||||
| SICK robot day | [38] | [38] | [38] | |||||
| SpaceBot Cup | [44] | [44] | [44] | [44] | [44] | |||
| SAUC-E | [2,53,62,73] | [2,53,62,73] | [2,53,62,73] | [2,53,62,73] | ||||
| VEX | [32,39,64] | [32,39,64] | ||||||
| WRO | [4,55] | [4,55] | ||||||
| WRS | [59,75] | [59,75] | [59,75] | [59,75] |
| Research Questions | Answers |
|---|---|
| RQ1: What type of mobile robotics competitions exist in the last few decades and with what aim? | Educational: attracting students to STEM areas encouraging them to enter in technologies careers. Industry: manufacturing and logistics. Domestic: assist people in household activities, especially those with disabilities. Sports: amusement for young students with focus on education. Search and rescue: creation of technologies to assist in natural disaster. State of the art: push the state of the art in a specific field like autonomous vehicles, drones and underwater robots. |
| RQ2: Where do the mobile robotics competitions take place currently and who is their target public? | Most take place in many countries all over the world. Some educational competitions usually take place inside a university or school in a specific region. The target public vary a lot, from young students until professionals and engineers. |
| RQ3: What type of robotics challenges are addressed by the mobile robotics competitions? | Education: include tasks in which the participants have to build a robot to perform some activity or sometimes just program the robot to realize a specific task, for example follow a line, dance, games, etc. Industry: the challenges vary between transport products and logistics tasks, in which the robot must navigate, avoid obstacles, pick up items, etc. Domestic: usually the robots have to help people with household tasks inside an environment that simulates a house. Some tasks include organizing items, opening the refrigerator, picking up a plate of food, etc. Search and rescue: tasks like climbing ramps, walking on dirty terrain with poor visibility, looking for missing people, pipe inspection, etc. Besides that this kind of competition can include underwater fields, buildings, small places, indoor and outdoor environments. Soccer: the soccer challenges usually includes teams of autonomous robots to compete against each other. |
| RQ4: What type of technologies are used in mobile robotics competitions? | Machine Learning, computer vision, localization and mapping (SLAM), speech, object and gesture recognition, real-time control, 3D printing, ROS, HIL, SimTwo, Gazebo, OpenCV, TensorFlow, LEGO Mindstorms, etc. |
| RQ5: What is the final application area of the mobile robotics competitions? | Education, industry, daily life, household tasks, search and rescue in disaster scenarios and amusement. |
| RQ6: How have these competitions been contributing positively to education? | Dissemination of technology and STEM concepts through young students, encouraging them to pursue a career in these fields, developing skills in programming, electronics, robotics, working in a team, increasing the motivation and besides that assisting universities to teach multidisciplinary domains. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brancalião, L.; Gonçalves, J.; Conde, M.Á.; Costa, P. Systematic Mapping Literature Review of Mobile Robotics Competitions. Sensors 2022, 22, 2160. https://doi.org/10.3390/s22062160
Brancalião L, Gonçalves J, Conde MÁ, Costa P. Systematic Mapping Literature Review of Mobile Robotics Competitions. Sensors. 2022; 22(6):2160. https://doi.org/10.3390/s22062160
Chicago/Turabian StyleBrancalião, Laiany, José Gonçalves, Miguel Á. Conde, and Paulo Costa. 2022. "Systematic Mapping Literature Review of Mobile Robotics Competitions" Sensors 22, no. 6: 2160. https://doi.org/10.3390/s22062160
APA StyleBrancalião, L., Gonçalves, J., Conde, M. Á., & Costa, P. (2022). Systematic Mapping Literature Review of Mobile Robotics Competitions. Sensors, 22(6), 2160. https://doi.org/10.3390/s22062160