1. Introduction
Improvement in UAV-based methods and the expense decrease of their sensing devices have offered a great foundation for wireless technologies. Due to the characteristics of having a small volume, high three-dimensional (3D) mobility, low energy consumption, and a higher chance of line-of-sight (LoS) [
1], UAVs have been widely used in emergency rescue, civil, public, and military applications [
2,
3,
4]. In various applications, with proper operation and placement, UAVs can be deployed either as extra access points to enhance the communication performance of the network or relays to disseminate data. Furthermore, UAVs can work as self-organizing nodes and can efficiently process the preassigned tasks [
5]. Hence, a UAV-based network can provide efficient and reliable wireless communication approaches for different real-time scenarios such as public safety scenarios. Here, the UAVs can be deployed as flying base stations (BSs) to replace the defective communication network and guarantee the transmission of data for the ground users [
6].
Despite the promising future and the numerous dazzling potentials for using UAVs as flying BSs, different technical issues usually appear in the UAV networks, and these should be avoided and minimized to have a reliable and efficient network. The most important issues include area coverage, 3D deployment/trajectory, communication connectivity, resource allocation, and energy limitations [
4,
7,
8,
9,
10]. In particular, the deployment of UAVs for coverage and tracking purposes highly impacts the energy resources, the connectivity among the UAVs, the limited communication range, and the interference produced by UAVs. Hence, it is difficult for UAVs to cover the candidate region all the time. Therefore, UAVs need to move around to ensure each ground point is covered for a specific duration. In the UAV area coverage problem, the important part is the evaluation of the coverage ability for the model. Another important factor in the coverage problem is the fairness; the UAVs should cover all parts of the region rather than covering only certain areas and leaving others without coverage [
11,
12].
UAV-communication-based research can be divided into two main categories: one is extending the communication coverage of the UAV network and deploying the UAVs as mobile BSs to serve the ground points, as in [
13,
14,
15]; the second category is relay UAVs, where UAVs are used to forward data from one point to the next UAV or to the ground point with minimum resources, as in [
16,
17,
18]. In addition to the coverage problem, energy is another issue for the UAV network since UAVs are generally powered by limited batteries. With limited energy resources, UAVs cannot keep moving all the time, and this leads to performance and endurance degradation; hence, UAVs need to work in an energy-efficient way to increase the network lifetime, keep the UAVs connected, and utilize the UAVs’ resources. Given that the UAV coverage and energy control issues are even more complex and challenging than other traditional control issues, a decision-making technique is needed to manage the interactions among multiple UAVs to achieve multiple objectives at the same time.
One of the decision techniques that is widely used to study the coverage and energy problems in UAV networks is game theory (GT). It is a powerful tool for mathematically modeling the interaction among the UAVs in the network to establish the coupling relationships of various rational decision-makers and to achieve an efficient distributed management of the network. Moreover, it can be used to design the distributed control strategies in the UAV network, and it has the ability to find the optimal values of the control strategies [
19]. Different types of GTs have been used to study the interactions among the UAVs and solve the coverage and energy issues in UAV networks such as the coalition formation game [
20], potential games [
21], and the mean field game (MFG) [
22].
Another type of solution that can be used to solve the energy and coverage problem is by leveraging deep reinforcement learning (DRL). It has shown a superior performance compared with the optimization- and game-based approaches [
23,
24,
25,
26]. The basic DRL algorithm, deep Q learning, depends on the deep Q network (DQN) to find the Q-value for each action–state pair, but it has a limited action space. Due to the unlimited action space for the coverage and energy control problem in the UAV network, a deep deterministic policy gradient (DDPG) method can be used instead of the basic DRL [
27,
28]. In this research, the control problem is complex since it needs to optimize four objectives at the same time: coverage ability, energy consumption, connectivity, and fairness. Therefore, the DDPG is a promising solution, and it can be used along with the designed utility of the game model to achieve more coverage, less energy consumption, and high fairness, while keeping the UAVs connected all the time [
29,
30,
31]. It can also deal with complex state spaces and with time-varying environments, and it uses powerful deep neural networks (DNNs) to assist the UAV in making decisions and providing high-quality services for the UAV network. Moreover, the DDPG has the ability to deal with unknown environments and emergency scenarios, and it enhances the robustness and reduces the calculation cost of the UAVs.
UAVs with high mobility properties need to work in a team to provide an effective communication coverage for a long period. This mission is challenging since UAVs have in general a limited energy resource and communication range. The first concern is that it is difficult to have the appropriate UAV coverage of the candidate region for a long period, due to the costs and the limitations in the communication range. Indeed, UAVs sometimes need to fly around to guarantee that the region is being covered during the required period. It is also important to have a fair communication within the region, as it is not efficient to cover part of the region for the whole period and leave some other parts without coverage. The second concern is the limitation in the energy resources as UAVs do not have the ability to keep flying for a long period. Hence, they need to use their energy resources in an efficient way in order to increase their lifetime. UAVs’ movements should also be optimized in order to complete more tasks with minimum energy requirements. In addition, movement control for a number of UAVs is quite challenging due to the huge number of possible interactions among UAVs.
To address the coverage and energy challenges, considering the limitations of the existing models such as working in a dynamic environment, complexity, and high computational time, we need to propose a solution approach able to achieve a fair communication and maximize the covered region of the UAVs with minimum energy resources. For this purpose, we propose a game theoretic model with online learning capabilities. This model is able to update the strategies following the environment dynamics and the mobility issues. The main contributions of this paper are as follows:
We modeled energy-efficient UAVs’ controls, which provide a fair communication coverage for all ground cells in the candidate region;
We developed a distributed UAV deployment algorithm using GT, which simplifies the interactions among UAVs and provides an optimal solution for the proposed game;
We propose a learning model that handles cases such as time-varying environments and sophisticated state spaces and to guide the decision-making process.
The remainder of the paper is organized as follows.
Section 2 reviews the available game- and learning-based models. Then, the system model and the problem definition are presented in
Section 3.
Section 4 formulates the state-based game model and presents the detailed design of the proposed DRL model. The simulation setting and the performance evaluation are provided in
Section 5.
Section 6 concludes the paper.
3. System Model
This section details the system model components (scenario, channel, energy consumption), states the problem, and discusses the solution approach in order to improve the network performance.
3.1. Scenario
In this paper, we deployed a number of N UAVs from a number of aerial base stations. The UAVs were equipped with GPS and had the ability to fly within a limited altitude level in order to provide a fair coverage to all cells in the candidate region. The UAVs were aware of their own locations. The transmission powers of the UAVs are defined as . They had the ability to change their 3D locations and track the on-ground users. This provides a better coverage and a higher wireless service quality with minimum energy requirements. Each UAV had connectivity limitations, such as a communication/sensing range . The UAV would lose its links to the other UAVs when the communication range was less than the separating distance. The UAVs also had maximum flying altitude values. Therefore, their coverage range was limited by their physical specifications and the environment conditions.
To simplify the coverage and energy issues and facilitate the representation of the UAV-based network, the candidate region
was divided into
Q cells, and the center of each cell is referred to as the point of interest
, as illustrated in
Figure 1. Each UAV was required to cover a number of IPs in a reasonable time based on the mission. The communication process can be achieved in
T slots of equal duration, where each slot is denoted
. For the sake of simplicity, we assumed that the signal over the cell could be wholly specified by the UAV when its center was within the sensing range. To clarify the “points of interestor IPs” term, we assumed that there was a user in the center of this cell (IP). Due to the limited number of UAVs and the energy and coverage challenges, UAVs cannot always guarantee the coverage of all IPs in the region. Moreover, the distribution of UAVs in practical scenarios is considered as a random and independent process, since UAVs are generally deployed in an unplanned and opportunistic manner. At the beginning of the mission, the UAVs started from random locations, and in each timeslot, the UAV could hover or move to the next location based on the 3D space, as explained later in the game model.
Let
represent the 3D location of a given UAV at time
t, where
, and
are, respectively, the UAV’s coordinates in the ground-level horizontal plane and the UAV’s altitude at time
t. Due to the limited flight speed of the UAV, its trajectories are defined by the maximum moving distance and can be expressed as follows:
where
represents the flight speed of the UAV
and
is the time needed to travel from the start location to the destination location. An additional constraint was introduced to avoid collisions that could occur between any two UAVs
. It is expressed as follows:
where
,
, and
represents the minimum distance to keep between the two UAVs
to avoid collision and interference issues.
3.2. Channel and Coverage Model
We assumed that the link between any IP
and UAV
follows the line-of-sight (LoS) and non-line-of-sight (NLoS) propagation models. As detailed in [
13], a channel in a free space path-loss model can be expressed as follows:
where
is the system carrier frequency,
represents the distance between the UAV and IP,
c is the speed of light, and
is the path-loss exponent specific to the environment (i.e., rural, urban, dense urban), as in [
46]. A popular approach used to model the UAV-to-ground (U2G) links is the probabilistic LoS and NLoS [
13], where the NLoS results usually from the shadowing and diffraction issues in the environment, and the resulting attenuations in the NLoS have a greater effect on the UAVs compared to the LoS. As in [
47], the path-loss between UAV
u and IP
k is expressed as follows:
where
and
represent the additional attenuation caused by the shadowing problem. In this system, the probability of the LoS link depends on a set of variables based on the environment such as the IP’s and UAV’s locations and the elevation angle between the IP and UAV. Therefore, the LoS and NLoS probabilities can be expressed [
48] as follows:
where
C and
B are constant parameters that depend on the environment, and the elevation angle
can be obtained as follows:
Here,
and
represent the altitude of the UAV and the altitude of IP
k from the ground level, respectively. The horizontal coordinates of point
k and the horizontal distance from the UAV at time
t are expressed by
and
, respectively. Let
represent the 3D distance between the UAV and IP
k at time
t. As in [
13,
43], the average path-loss can be expressed as follows:
The coverage probability of the IP can be evaluated by using the average path-loss between the IP and the UAV. When the IP falls within the communication range of the UAV, we considered that this IP was covered. We also assumed that any given IP can be covered by many UAVs at the same time. As in [
49], the corresponding coverage value of any cell
at time
t was considered as a control strategy for the network and can be expressed as follows:
The main objective of the study was to maximize the overall coverage score with minimum energy requirements. However, in such cases, this might cause unfair coverage for some IPs in the candidate region. In other words, some IPs could be covered for a long time, while other IPs could be rarely covered during the mission period. Therefore, we needed to guarantee a fair coverage for all IPs in the region. This can be carried out by a measurement metric called Jain’s fairness index (FI) [
50]. By adopting the predefined control strategy, the corresponding
value is expressed as follows:
3.3. Energy Consumption Model
In general, the UAVs’ energy consumption model consists of two main parts, namely: the movement/propulsion part and the communication part. The movement/propulsion power consists of three parts: induced power, profile power, and parasitic power. The induced power results in the thrust of the propelled air downward. The power of the profile overcomes the rotational drag experienced by the spinning blades of the propeller. The parasitic force avoids body drag when there is a relative translational displacement between the quadrotor and the wind. Based on the previous description, the movement/propulsion energy of the UAV is employed to provide thrust to overcome gravity and the drag during the movements. The flight movements of a UAV can only be horizontal movement, hovering, and vertical movement. Some factors affect the power consumption model such as payloads, the weight of the UAV, and flight time [
51]. On the other hand, the energy for communication results from signal radiation/reception, signal processing, and the communication circuitry. Specifically, this consumed energy is often smaller compared with the flight energy [
52]. Therefore, the energy for communication was neglected in this research. Hence, the approximated movement/propulsion power can be expressed mathematically as follows [
53,
54]:
where
is the tip speed for the rotor blade on the UAV,
represents the fuselage drag ratio for each rotor,
is the air density,
represents the rotor solidity,
A is the disc area for each rotor,
is the mean rotor-induced velocity in the hovering mode, and
and
are the blade profile power and the derived power, respectively.
Hence, the energy consumption can be written as follows:
where
, and it represents the flight time for the UAV
in timeslot
t.
Furthermore, the residual energy
in timeslot
can be defined in terms of the consumption energy
and the battery size
as follows:
Once the UAV reaches a minimum energy called , it quits from the system, and it goes to recharge.
3.4. Problem Statement
UAVs should perform reasonable movements in order to provide a fair and effective communication coverage to all IPs. However, to maintain the connections among the UAVs as much as possible and reduce the energy consumption, we should reduce the movements of the UAVs. In short, our target was to find a control algorithm that can meet the following objectives:
Maximize the total coverage score in the network;
Maximize the geographical fairness to provide a fair and effective communication to all IPs;
Minimize the energy consumption resulting from the movements of the UAVs;
Ensure the connectivity between the UAVs in the network, avoid crossing the borders of the candidate region, avoid collisions between the UAVs, and optimize the UAVs’ movements in the network;
The UAV network should have online learning capabilities, especially in the case of unknown environments or sudden changes in the candidate region during a mission.
4. Problem Formulation
In this section, we develop a state-based potential game to move the UAVs from random initial locations to appropriate locations in order to achieve maximum coverage with minimum energy consumption. Then, we introduce a learning algorithm to update the UAVs’ actions until reaching a steady-state point without any improvement.
4.1. Game Formulation
The main idea was to propose a distributed algorithm that can implement and simplify the interactions among the UAVs based on GT. In general, GT is adopted and used in most of the previous UAV-based research to analyze interactions among UAVs, especially in dynamic and dense networks. UAVs in the game approach are considered as the players of the game and can interact to make decisions based on the available strategies. They can play in a smart manner by selecting the best strategy that maximizes the coverage score and achieves fair communication coverage with minimum energy consumption. Our game consisted of three main components:
Set of players: UAVs; ;
A set of strategies for each player: This represents the next movement of the UAV in the 3D location at time , where t is defined as . The selected strategy can be represented for each player at t by the location: . The UAV has the ability to move at multiple levels, and each level is limited by the min and max height; they can move in a set of directions. We constructed our list by 27 movements in the 3D space (i.e., UAV can move forward, backward, right, left, and diagonally, hover in the same location, and move up/down with the same previous options);
Utility/payoff: This depends on the coverage score and the energy consumption .
The utility function depends on the energy consumption and the coverage score, and it can be designed as follows: UAVs consume energy for their sensing and movement processes. We first considered the energy consumption of the UAVs in the sensing process to cover the IPs in the candidate region. Each UAV has the ability to sense the downward area based on its own camera specifications. However, when the coverage radius increases, the UAV needs more energy to cover more area either by moving or by increasing the used power. We assumed that all UAVs had the same range of the sensing area due to the same physical properties and altitude limitations. To reduce the energy usage, the sensing range should be decreased, and it can be represented as a circular area with
for all UAVs
. Based on that, there is a tradeoff between the covered area and the energy usage, and it can be expressed mathematically based on the selected action
of the UAV as follows:
where
is a constant depending on the efficiency of the sensing units of the UAV and
represents the normalized sensing radius based on the selected action (i.e., new location) at time
, and each UAV attempts to find its own energy usage by finding a suitable radius.
Next, we considered the energy consumption resulting from the movements of the UAVs, and this value depends on both the current and previous locations of the UAV. It can be represented mathematically as follows:
where
is a constant depending on the efficiency of the power units for the UAV,
is the action for UAV
and represents the new location of the UAV
, and
represents the previous location of the UAV
.
Using the coverage score, fairness, sensing energy, and movement energy equations, the utility to be designed next is a function of the previous and current locations of the UAV. Since the control problem depends on the current state and the previous one, it can be implemented using the state-based potential game. The relation between these variables can be represented in a linear form or a non-linear form by adding some other weights and constants that describe the environment. To formulate the coverage–energy problem as a state-based game, the utility function
was constructed for each UAV
to study the tradeoffs between the covered area and the energy consumption by UAV
. Initially, the utility function for UAV
can be expressed as follows:
where
F is the coverage function for UAV
i, which depends on the coverage score and the fairness, and it is expressed as
. Note that
is local over the covered area by UAV
, and it is dependent only on the actions of UAV
. As we noticed from the utility function in Equation (
16), increasing energy consumption will have a negative impact on the utility value of the UAV. On the other hand, increasing the coverage score will have a positive impact on the utility value while taking into considerations the connectivity and the interference issues between UAVs, as well as the borders of the candidate region and the minimum distances between UAVs. In this problem, the main objective is to maximize the utility value for each UAV, and hence, we looked for the actions that satisfy:
After introducing the game ingredients and based on [
55], the state-based potential game is discussed in the following definition:
Definition 1. The coverage–energy-state-based potential game , where and A is the action set, is an exact state-based game with the following potential function: The proof part of the above equation is in
Appendix A. Algorithm 1 summarizes the main steps of the state-based game part.
| Algorithm 1: Pseudocode for the state-based game part. |
1.2 - 1:
Initialize the UAV network. - 2:
for each timeslot t in T do - 3:
for each UAV i in N do - 4:
for each action j in do - 5:
Evaluate and values using action j. - 6:
Find and using action j. - 7:
Store . - 8:
end for - 9:
Select the action with the maximum reward value using Equation ( 16). - 10:
Update the UAV location based on the action. - 11:
while The new UAV location is outside the region or the UAV loses its connectivity do - 12:
Cancel the new movement. - 13:
Select the next maximum action. - 14:
Update the UAV location based on the new action. - 15:
end while - 16:
Update the last values for UAV i. - 17:
end for - 18:
end for
|
When the UAV changes its action, the utility will not be necessarily improved with other UAVs’ actions. Hence, it does not definitely mean that the action is a global optimum for all the network. Due to this and the sudden changes in the network, the UAV network should have some learning capabilities to avoid such cases.
4.2. Learning Approach
The UAV network should have online learning capabilities especially in the case of unknown environments or sudden changes in the candidate region during the mission. Moreover, with the increasing complexity of the networks, most of the proposed game approaches are unable to achieve the requirements and reach a stable point. Hence, a learning approach is required to overcome such behaviors that can occur in the UAV networks. One of the popular learning approaches is reinforcement learning (RL); hence, we start by reviewing RL and then introduce the proposed learning approach.
4.2.1. Preliminaries and Problem Model
The deep RL (DRL) approach considers the “deep” shape of RL, which consists of two phases: training phase and testing phase. In the training phase, the DNN is trained offline, and the exploration stage is required to find the optimal policy. In the testing phase, it consumes less resource, and there is no need for the exploration stage compared to the training phase; it only performs forward propagation. DRL within the actor–critic framework [
56] consists of the critic
, which finds the action value function using the actor policy
, where
and
are the parameters of the critic and actor networks, respectively.
Two methods are usually used to overcome the divergence problem that results from using the DNN in DRL: the target network and the experience replay buffer [
24]. The DRL approach extracts and samples a mini-batch of the collected experiences during the training from the replay buffer. The generated random samples break the relation between the sequential samples and make the training process more stable. The target networks of the critic and actor,
and
have the same configurations of the learned network
and are employed to evaluate the update target.
In the UAV network, a UAV is treated as an agent and interacts with the environment in discrete decision epochs/timeslots. At each timeslot
t, the UAV
observes the state
, which enters the network as the input, and it outputs the action
. Next, the UAV receives a reward value
, and the state converts to
. We need to find a policy
that converts a state into an action to improve the discounted cumulative reward
=
, where
represents the discount factor. A replay buffer is used to store the experience values
for the training of the network. In the case of state
, the system follows action
at epoch
t, then:
where
, and it represents the discounted cumulative reward;
estimates the expected value of
for each
pair. The greedy policy is one of the commonly used off-policies, where
. The critic network is trained by minimizing the following loss function:
where
L is the mini-batch size from the reply buffer
. To train the actor network, we need to minimize the following loss function of the actor:
The parameters of the target networks
are updated using the following expressions as explained before and the use of the gradient method [
28]:
where
represents a constant to control the soft update [
57].
4.2.2. State Space
The UAV
i at timeslot
t in the system acts a control center, which adjusts its location and power transmission. The observation space
of the coverage–energy problem contains: UAV locations
and the energy consumption
of all UAVs. Specifically,
can be represented as follows:
Based on the observation space, the state space of the system at timeslot
t for any UAV
i can be written using the coverage score. Specifically, it can be represented as follows:
has a cardinality of
, and the DRL agent makes decisions based on both the energy consumption and the coverage score (i.e., location).
4.2.3. Action Space
Each UAV needs to select the most appropriate next location with the minimum energy consumption during its flight period. The action
of UAV
i at timeslot
t is the next location and can be represented as follows:
has a cardinality of
, and it is defined as a control policy that defines how the UAV moves at each decision timeslot.
4.2.4. Reward Function
As we explained before, the UAV can move in restricted movements, where each UAV should not cross the borders of the candidate region and should not move close to other UAVs in the network. Therefore, we added a fine
to the UAV that crosses the border. Moreover, the UAV will lose its connections with other UAVs based on its communication range
. This fine value forces the UAVs to avoid selecting the actions that lead them to move outside the region and lose the connections with other UAVs. The network efficiency at timeslot
t can be defined as follows:
The first term of the reward is the gain (coverage), while the second term is the cost (energy consumption). The reward function is then expressed mathematically for UAV
i at timeslot
t as follows:
4.2.5. Training Process
The coverage–energy problem algorithm was designed to be an episode from the start of the UAVs’ flight from the initial locations to the end of the energy consumption. Algorithm 2 illustrates the learning process for the UAV based on the previous specifications. Due to the huge state space and action space and in order to remove the redundancy and improve the accuracy of the simulation, we used offline and online learning to train the network. Each UAV has unique actor and critic networks, and the target network of the UAV is a copy from this actor and critic networks. However, the weights of the target network are updated separately using Equations (
23) and (
24). As explained before, the algorithm learns from the experiences (i.e., action, state, and reward) that are stored in the replay buffer with a size of
. In other words, at each timeslot
t during the learning process, the actors and critics for all UAVs in the network are updated from the experiences with the use of randomly sampled mini-batch
.
| Algorithm 2: Pseudocode for the DRL approach. |
1.2 - 1:
Initialize the experience replay buffer . - 2:
for each UAV i in N do - 3:
Initialize the actor network with weights . - 4:
Initialize the critic network . - 5:
Initialize the target actor network with weights . - 6:
Initialize the target critic network with weights . - 7:
end for - 8:
for each episode in do - 9:
Initialize the locations of the UAVs. - 10:
The initial speed is zero for the UAVs, and their battery energy is . - 11:
Initialize the environment. - 12:
Receive the initial state . - 13:
for each time t in T do - 14:
for each UAV i in N do - 15:
Select action , where is the noise term. - 16:
end for - 17:
UAVs execute their actions . - 18:
Update next state , and obtain reward . - 19:
for each UAV i in N do - 20:
if UAV i moves outside the region or close to other UAVs then - 21:
Find . - 22:
Neglect the new location and update . - 23:
end if - 24:
end for - 25:
Update . - 26:
Store in the buffer. - 27:
for each UAV i in N do - 28:
Sample L random mini-batches . - 29:
Find , where . - 30:
Update weights by minimizing: . - 31:
Update weights by minimizing: . - 32:
Update the target network’s weights: and . - 33:
end for - 34:
end for - 35:
end for
|
From Algorithm 2, we can see the pseudocode of the training process for the learning approach. It starts by initializing the replay buffer, and then, each UAV randomly initializes its actor and critic networks with weights and , respectively. Furthermore, the weights of the target network are randomly initialized for all UAVs in the same manner as the actor and critic networks. Next, the training is configured by having episodes, and each episode consists of T timeslots. In the training loop, the system obtains initial state , and we construct the starting conditions of the environment. For each UAV i, it selects an action according to the actor with the observation as the inputs. To avoid the UAV selecting a locally optimal policy and performing more explorations, a noise term with a Gaussian distribution is added to the selected action. After performing these actions, the UAV will obtain a reward value and a new state . However, a fine is applied on the UAV, if the selected action forces the UAV to go outside the region or close to other UAVs. Hence, the UAV will avoid this action, and it cancels the new location. The final values of are then stored in the replay buffer. At the end of the training process, each UAV at timeslot t randomly selects a mini-batch with a length of samples from the buffer, and it then evaluates the target value using the target critic . After this, the weights of the critic and actor network are updated using the loss and the gradient method, respectively. Lastly, the target network weights are updated slowly using and the learning rate .
4.2.6. Complexity Analysis
In dynamic scenarios, we cannot determine the trajectory of the UAVs due to their unpredictable movements. Thus, the time complexity analysis of the UAV control algorithm is very important. With the increasing complexity of the UAV control problems, the basic learning approach is not suitable to meet the requirements of the distributed algorithm in dynamic scenarios. In our research, the control problem depended on many factors, the most important factors being the energy and the location of the UAVs. Therefore, a learning algorithm was needed to solve the control problem during the UAV movements, which was a combination of the state-based game and the actor–critic algorithm.
As for the complexity analysis of the SBG-AC algorithm, the complexity of the exploration and learning process depended on both the number of states and the number of actions in the control problem, as well as the architecture of the learning model. Due to the huge space and action spaces, a DNN was used in the learning process for both the actor and critic networks. In the SBG-AC algorithm, the UAV chooses its action based on the current state in each timeslot to construct the training dataset. With enough training steps for a network with a number of UAVs, a huge number of training samples were collected, which guaranteed the convergence of the DNN and enabled the UAV to learn the optimal action. Since SBG-AC can be learned offline, we considered the time complexity of the testing stage. In the testing stage, the collected observations were the input of the DNN, and the selected action was the output. Hence, the complexity for the DNN with fully connected layers depended on the number of neurons and the number of layers in the network and can be expressed mathematically as follows:
where
represents the number of neurons in the fully connected layer
and
is the number of fully connected layers in the model.
5. Performance Evaluation
In this section, we first present the simulation setting and then evaluate and discuss the results for the game and learning model. To highlight the performance of the SBG-AC, we considered a set of experiments with different numbers of UAVs and initial settings. In addition, we simulated another two models from previous research for the performance comparisons [
31,
36].
5.1. Simulation Settings
In our simulation, we performed the simulation runs with Tensorflow 2.0.0 and Python 3.7, and other specifications of the machine are listed in
Table 2. Due to random initialization in the UAVs’ locations, we repeated our simulation scenarios 100 times, and we found the average values of the targeted metrics. We considered a square area with 100 × 100 square units; the center of each unit is called the IP, and its side length equaled 100 m. In addition, when the UAV covers part of the square or the whole square, it considers it as a covered square based on the probability function described in Equation (
9). UAV
can fly in 3D space at time
t with
coordinates. To avoid collisions and keep UAVs connected most of the time, we restricted the movements of the UAVs based on Equations (
1) and (
2), and we penalized the UAV when it lost its connections or moved outside the area by one. Furthermore, the UAVs could move vertically within a predefined range of altitude values due to UAV regulations and rules. The fully charged energy of the battery was
joules. The channel characteristics of the UAV network followed the urban environment with path-loss exponent
, and more settings of the network are summarized in
Table 3 based on [
31,
36,
40,
44,
45].
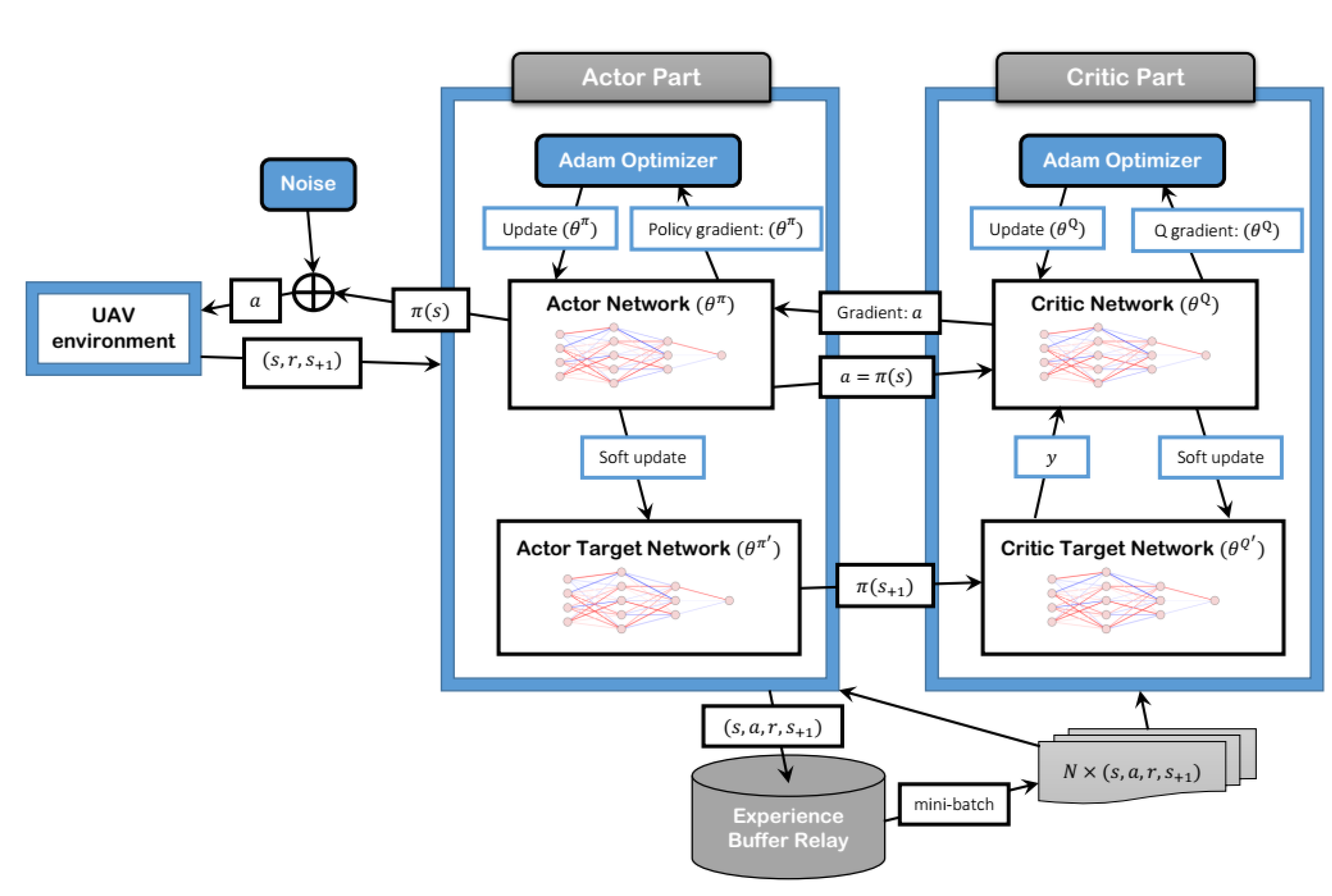
5.2. Network Architecture
The learning process of the SBG-AC model was designed based on the actor–critic DRL algorithm and the deep deterministic policy gradient (DDPG). The actor–critic network is shown in
Figure 2. Both actor and critic networks were developed using DNNs. Each network consisted of a set of hidden layers with a predefined number of neurons. The actor and critic DNNs need to have a large size to handle the learning data and prevent the over-fitting problem. Hence, we conducted a set of experiments using “Tensorflow 2.0.0” to find the optimal values of the hyperparameters for the actor–critic DNNs. Both networks had two fully connected hidden layers. The neurons of the actor network were set to 1000 in the first hidden layer and 500 in the second hidden layer. On the other hand, the neurons in the critic network were set to 500 and 400 neurons in the first and second hidden layers, respectively. The input and output sizes of the two networks depended on the action and state sizes and the number of UAVs in the model.
In our design, the actions represent the next 3D locations of the UAVs with a size equal to
, and the states represent the 3D location and the residual energy value for each UAV with a size equal to
. To improve the learning model and avoid convergence instability or local optima, we normalized the states of the UAV to
and used the scaling and tanh methods to bound the actions in the actor network to
. Moreover, we used the rectified linear unit (ReLU) function for activation purposes in all layers except the output layer and L2 regularization for over-fitting prevention in both networks. The Adaptive moment estimation (Adam) optimizer [
58] was used in the actor and critic networks to update the DNNs with learning rates equal to 0.001 and 0.002, respectively. We used
equal to 0.01 in the soft updating process, and the discount value
was set to 0.999. Most of the settings in the two networks were used after performing some trial experiments. All settings for the learning model are listed in
Table 4.
During the training phase, we stored the trained SBG-AC results every fifty episodes, each of which had two-hundred epochs, and thus, we had eight models in total. In the testing phase, we tested each model 10 times. We then found the average value and selected the best one from the eight models.
5.3. Evaluation Metrics
In this paper, we used three metrics to evaluate the performance of the model, and we plotted the normalized values of the selected metrics for different numbers of UAVs. The three selected metrics were:
Average coverage score: This was evaluated using the coverage probability Equation (
9). In each iteration, the coverage score was updated based on the new movement of the UAVs, where the new location for the UAV was selected based on the resulting action, which improved the reward value for the UAV network. With any network size, we found the coverage probability for all cells in the selected area over the running period;
Fairness index: This shows how the UAVs cover the ground points (IPs) in the network. To have a fair model, we needed to avoid covering some cells all the time and rarely covered other cells. The coverage performed by the UAVs should be equally distributed on all cells to achieve the best fairness value. This metric was measured using Equation (
10);
Normalized energy consumption: This represents the required energy for sensing and movement processes during the testing period. We recorded the energy consumption for each UAV and then found the average energy consumption for all UAVs in the network within the current iteration/timeslot. Next, we normalized the measured values to the required energy for the UAV to move the maximum distance. The sensing and movement consumption energy value was evaluated using Equation (
12).
5.4. Benchmark Models
To compare and validate the SBG-AC model using the same simulation settings, we simulated the following learning models:
DRL-EC3 [
31]: This is a learning method that deploys and navigates the UAVs to improve the energy efficiency of the UAV network. This model was built with the help of DRL technology, and all UAVs worked based on one actor–critic network;
Distributed-DRL [
36]: This is an enhanced version of the DRL-EC3 model. It was built to handle the dynamic changes in the network, let the UAVs work in a distributed manner, and ensure the connectivity among all UAVs. A learning-based method was developed, where each UAV had its own actor–critic network, and it was able to decide its best action.
The similarities and differences among SBG-AC, DRL-EC3, and distributed-DRL are summarized in
Table 5.
5.5. Performance and Analysis
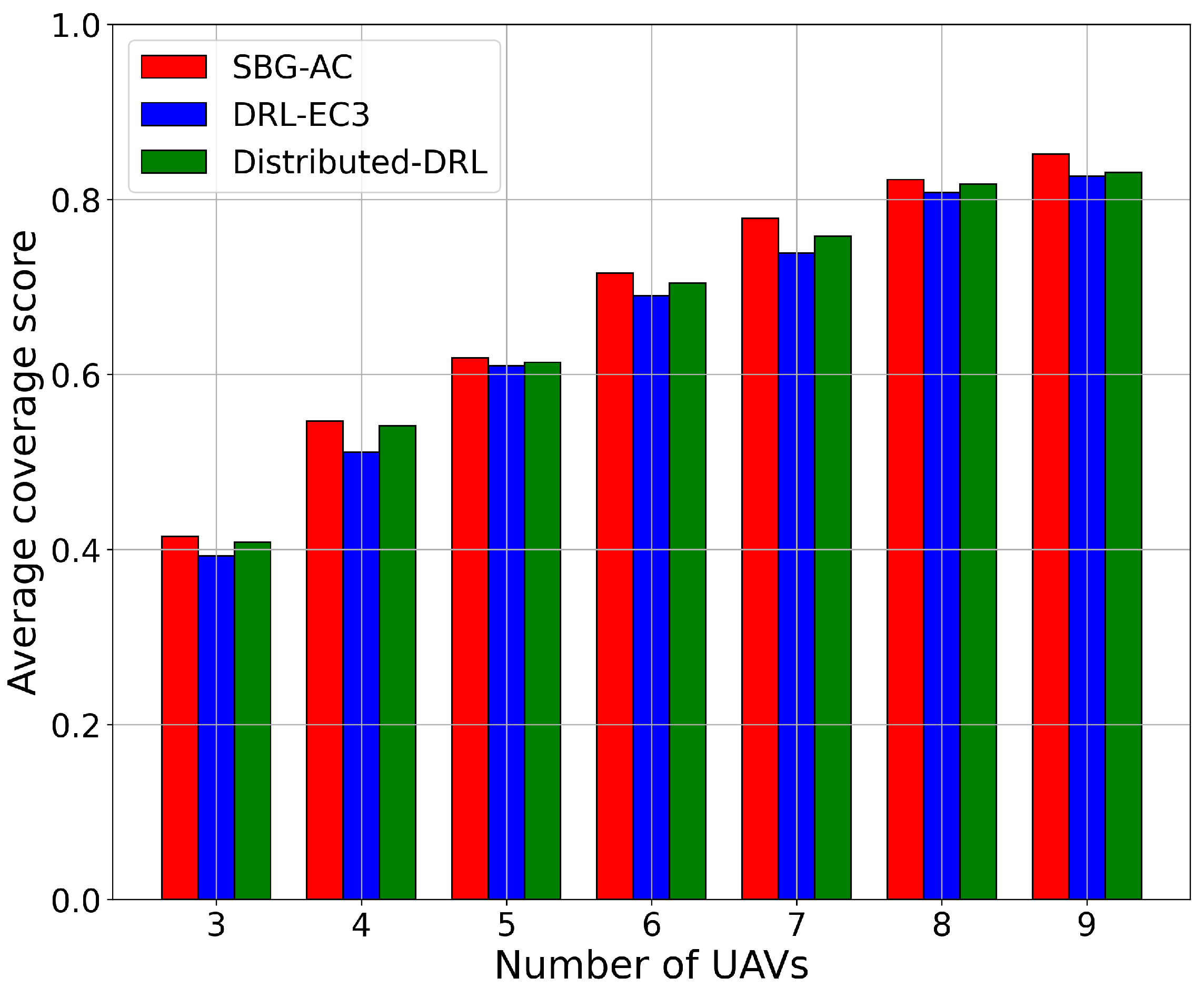
We started by comparing the performance of the three models in terms of the coverage score with respect to the number of UAVs.
Figure 3 demonstrates the results in terms of the coverage score for SBG-AC (red color), DRL-EC3 (blue color), and distributed-DRL (green color) for different numbers of UAVs. From
Figure 3, we noticed that SBG-AC beat DRL-EC3 and distributed-DRL in terms of the coverage score by an average increment approximately equal to 3% and 1.1%, respectively, for all network sizes. For instance, when the number of UAVs = 3, SBG-AC achieved a coverage score equal to 42%, while DRL-EC3 covered around 39.5% and around 40.8% with distributed-DRL for the same area. In the case of seven UAVs, the coverage score achieved by SBG-AC was 78%, by DRL-EC3 was 74.2%, and by distributed-DRL was 73.8% for the same network. Furthermore, in the case of nine UAVs, SBG-AC outperformed DRL-EC3 and distributed-DRL by around 2% and 1% with coverage scores equal to 85.2%, 84%, and 83.1%, respectively. The same trend was achieved by the three models for other sizes. When the number of UAV increased, the average coverage score reached by SBG-AC monotonically improved due to the new UAVs being able to have more flexibility in covering IPs, thus achieving a better coverage score. The initial locations for the UAVs in these models were assigned using a uniform random distribution. We also noticed that the average needed epochs to reach the same steady-state coverage value were fewer for SBG-AC compared to DRL-EC3 and distributed-DRL in all scenarios.
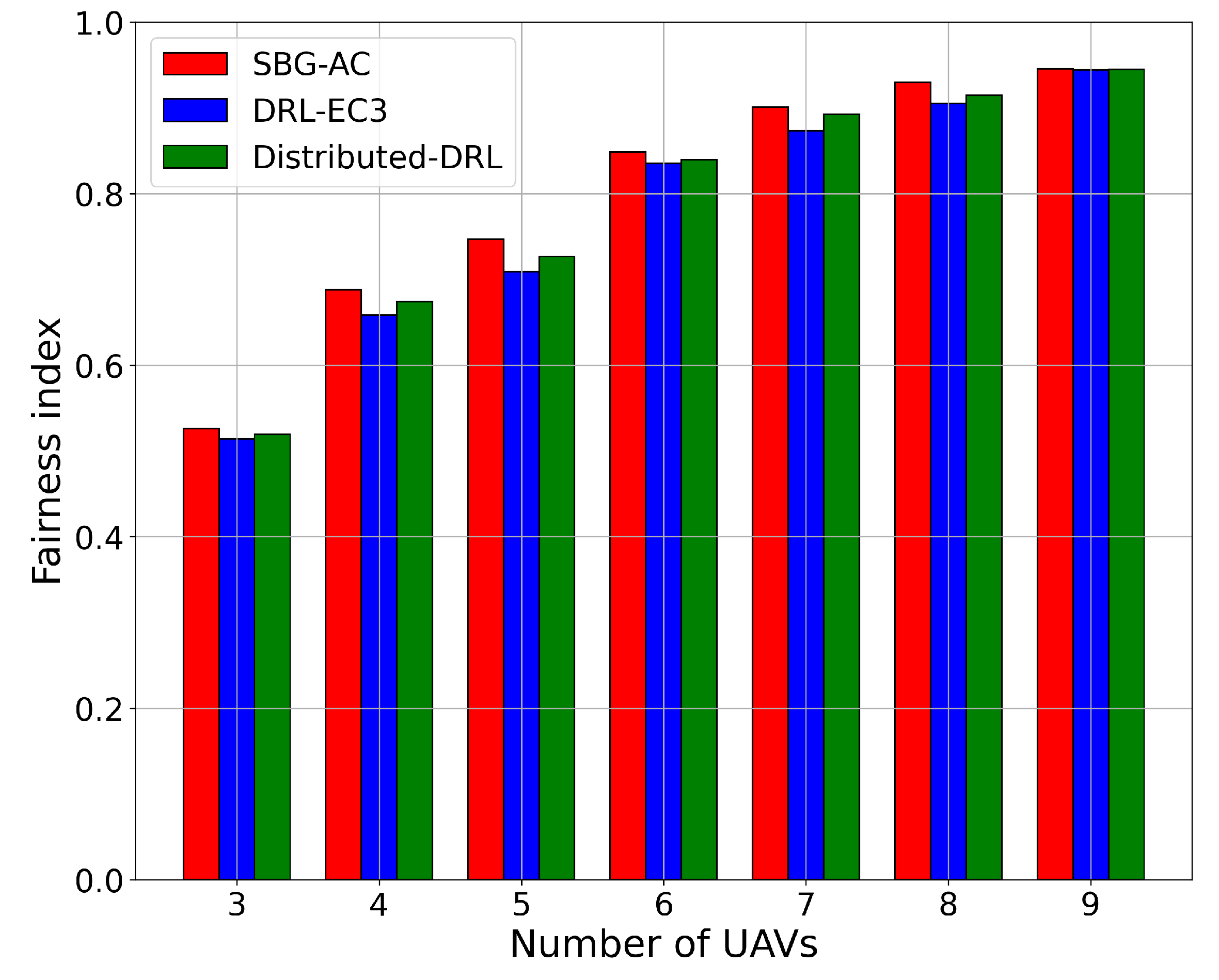
Next, we compared the three models in terms of the fairness index with respect to the number of UAVs in the network.
Figure 4 presents the results in terms of the fairness index for SBG-AC (red color), DRL-EC3 (blue color), and distributed-DRL (green color) for different numbers of UAVs. From
Figure 4, we noticed that SBG-AC achieved better fairness values in all networks compared to DRL-EC3 and distributed-DRL by an average increment approximately equal to 2.2% and 1.1%, respectively. For instance, when the number of UAVs was four, SBG-AC reached a fairness index equal to 69%, while DRL-EC3 achieved a fairness index equal to 66% and distributed-DRL a fairness index equal to 67.8%. In the case of five UAVs, SBG-AC significantly improved the fairness index with a value equal to 74.7%, 70.5% for DRL-EC3, and 72.7% for distributed-DRL using the same network. In case of eight UAVs, SBG-AC outperformed DRL-EC3 and distributed-DRL by around 2.4% and 1.1%, with fairness values equal to 92.9%, 90.5%, and 91.4%, respectively. The same trend was seen for these models for other network sizes. When the number of UAVs increased in the network, the fairness index directly improved due to more cells being covered by the new UAVs. We also noticed that the average needed epochs to reach the same fairness index were fewer in SBG-AC compared to DRL-EC3 and distributed-DRL in all scenarios.
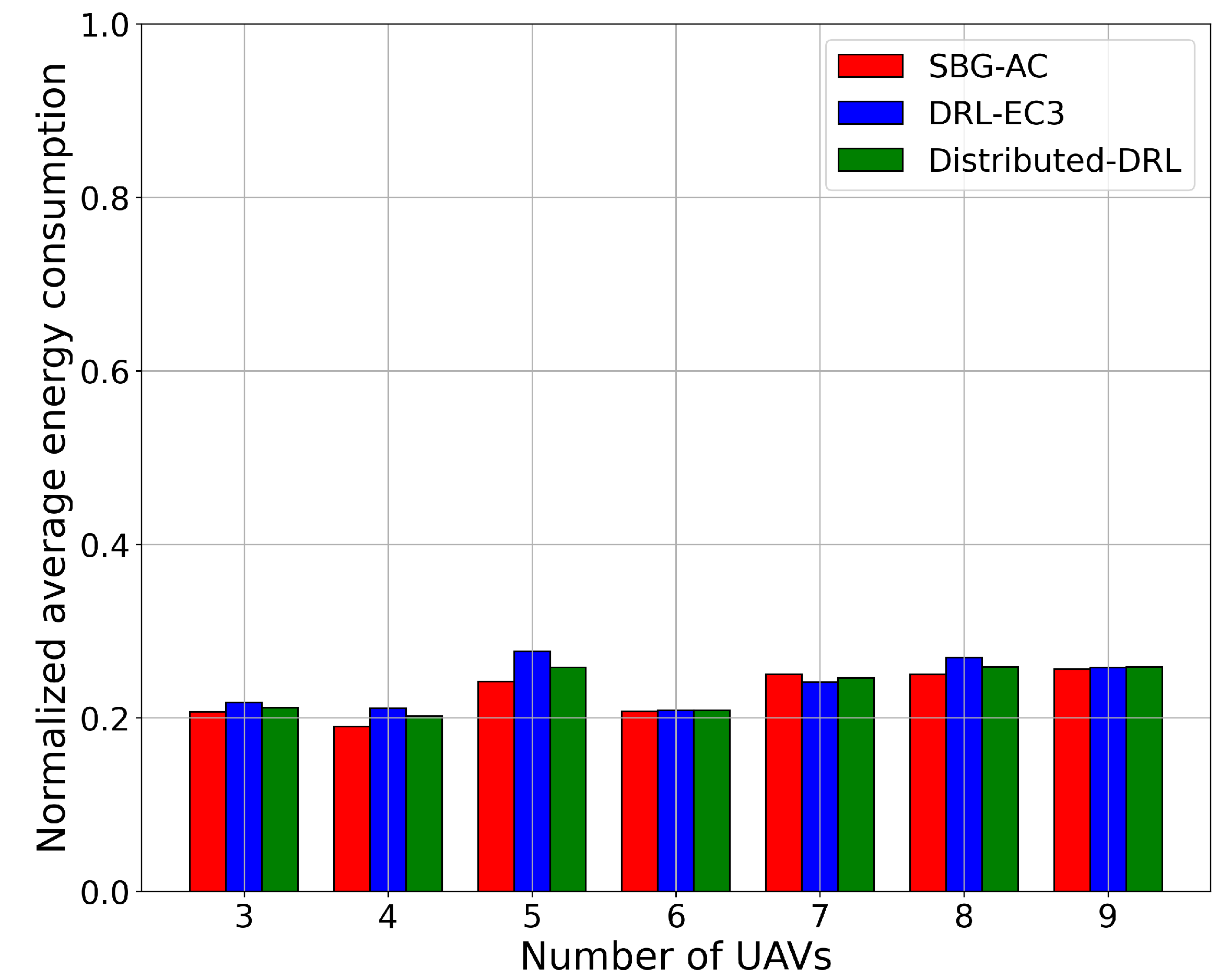
For the energy consumption metric, we compared the SBG-AC model with the two models in terms of the normalized average energy consumption for different numbers of UAVs.
Figure 5 shows the normalized average energy consumption results for SBG-AC (red color), DRL-EC3 (blue color), and distributed-DRL (green color). From
Figure 5, we noticed that SBG-AC, DRL-EC3, and distributed-DRL almost has the same energy consumption values for all network sizes. For instance, when the number of UAVs was six and nine, SBG-AC, DRL-EC3, and distributed-DRL required almost the same normalized energy consumption (20.8% and 25.7%) to reach a coverage of 71.5% and 85.2% in SBG-AC, 69.4% and 84% in DRL-EC3, and 70.4% and 83.1% in distributed-DRL. In the case of seven UAVs, DRL-EC3 required less normalized energy consumption (24%) compared to SBG-AC (25%), with coverage scores of 74.2% for DRL-EC3 and 78% for SBG-AC. For other sizes, SBG-AC beat DRL-EC3 and distributed-DRL with a small deviation in their values. We observed that the energy consumption values did not vary when the number of UAVs increased in these models. Indeed, more UAVs might lead to fewer movements compared to fewer UAVs due to the restrictions in the connectivity and interferences with other UAVs. As a result, the UAVs did not consume more energy for the movements.
5.6. Discussions
In this testing scenario, we used eight UAVs, and the noise term was zero variance, while other simulation settings were kept as before. Here, we discuss if the SBG-AC model has a practical sense to be applied for UAV control challenges such as energy, coverage, and fairness. Then, we compared it with DRL-EC3 and distributed-DRL models in terms of the three metrics.
Our reward function depends on three objectives (i.e., coverage, fairness, and energy), and it has a penalty value to keep the UAVs in the candidate area and to maintain the connectivity and interference among the UAVs. In the testing phase, the state data were the input (i.e., location and energy) of the system, and each UAV utilized its own actor network in a distributed manner to produce an action. The UAV selected its actions (i.e., next location) based on the designed reward function and the utilization of the actor network. However, when the UAV finds that the new location, it might move out of the area. Hence, the UAV will cancel the new movement, and it update its states accordingly.
From the summarized testing data in
Table 6, we noticed that SBG-AC outperformed DRL-EC3 and distributed-DRL in the coverage and fairness metrics. In terms of coverage score per episode, with eight UAVs, SBG-AC covered around 84.6% of the candidate area, DRL-EC3 80.8%, and distributed-DRL 82.7%. For the fairness index, SBG-AC also achieved a better fairness ratio compared to DRL-EC3 with the improvement ratio equal to 3% for the same UAV network and 1.7% with distributed-DRL. In terms of energy consumption, the three models had almost the same normalized value, and hence, this indicated that the energy had less impact on the coverage and fairness values. As a result, these models provided more robustness to the network compared to the traditional models (i.e., random-based model). As indicated before, more movements introduced more energy consumption; hence, we restricted the UAV movements by following only the resulting action from the actor–critic network in order to save the energy and then increase the overall lifetime. Indeed, the actor–critic-based algorithm was used since it considered the action policies of all available agents in the network and it had the ability to learn the policies for control problems with a large state space. The complexity of the SBG-AC can be determined with respect to the action dimension, the state dimension, and the construction of the DNN in the actor–critic network, as explained before in the complexity analysis part.
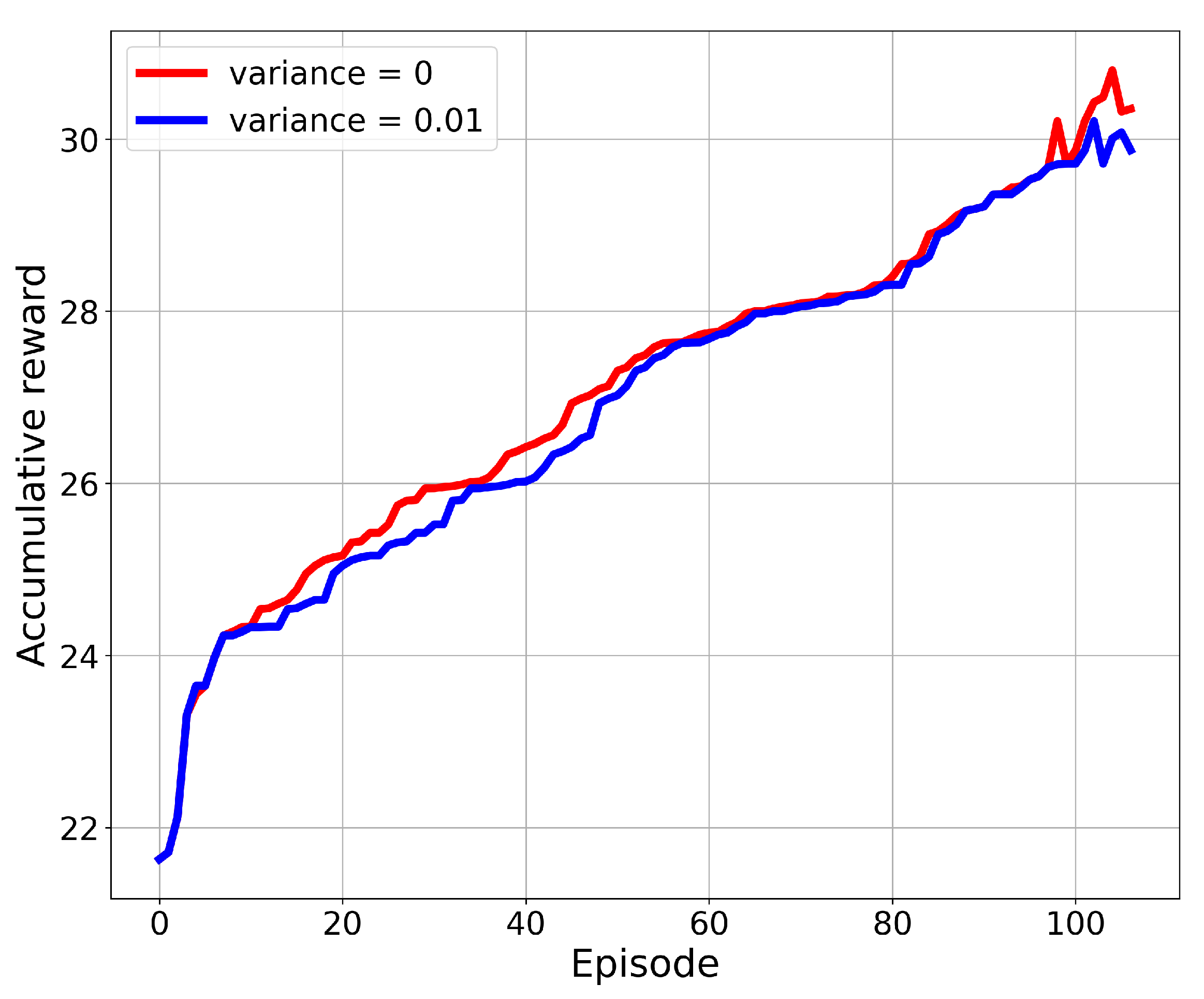
After the number of episodes in the training process, we found that the accumulative reward value for SBG-AC converged to a specific value without any improvement.
Figure 6 presents the results in terms of achieved rewards over episodes for the eight-UAV network with zero variance noise and 0.01 variance noise. We noticed that the reward improved over the episode value due to the learning stage, then the growth in the reward after 50 episodes slowed down, and it started to converge. At the start of the simulation, many IPs still had not been visited by the UAVs, and the fairness index of the network was still low. With the learning process, an action will be selected based on the previous experience, and then, it will provide a significant improvement on the reward value until it converges. This convergence ensures that the model is designed in a proper way and it can work in different scenarios and under dynamic environments.
The summary and the advantages of using SBG-AC with eight UAVs are listed as follows:
SBG-AC improved the coverage score, fairness, and consumption energy by approximately 4%, 3%, and −0.6%, respectively, in the case of DRL-EC3 and by approximately 1.9%, 1.7%, and −0.4%, respectively, in the case of distributed-DRL;
SBG-AC needs fewer iterations/less time (=161) to achieve the best values of the three metrics compared to DRL-EC3 (=178) and distributed-DRL (=165).
Due to the use of instantaneous rewards and the action space (only the next locations), the performance of SBG-AC was higher than that of the DRL algorithm;
The dimensions of the input and output for the centralized algorithm increased with the number of UAVs; thus, the time complexity will increase accordingly. Hence, the distributed algorithm is more appropriate in the case of dynamic environments;
DNN was used in the actor and critic networks to estimate the state–action value instead of the using Q-table as in the basic RL models. Therefore, it is able to fit different functions based on different features, and the hyperparameters can be tuned (e.g., discount factor, neurons in the fully connected layer, and experience replay buffer size) to improve our results.
To this end, we used the actor–critic algorithm (i.e., DDPG), one of the most common DRL algorithms, in this research to take advantage of the above-mentioned results and features.
6. Conclusions and Future Work
In this paper, we introduced a novel algorithm called the state-based game with actor–critic (SBG-AC) to control multiple UAVs in order to improve the coverage, connectivity, and fairness and minimize the energy consumption in a UAV network. The control problem of the 3D movement for a group of UAVs under fairness, coverage, and energy constraints was formulated as a state-based potential game, while an actor–critic algorithm was proposed to solve the formulated game and to guarantee the convergence of the distributed model. In the SBG-AC model, each UAV acted as an agent in the system to search and learn its 3D location policy. We conducted extensive simulations for different numbers of UAVs (i.e., 3, 4, 5, 6, 7, 8, and 9) for the performance evaluation. We also found the proper settings of the actor–critic algorithm (i.e., DNNs’ configuration, learning rate, and discount factor) through a trial simulation. The simulation results demonstrated the efficiency and the convergence of SBG-AC, and it achieved better performance compared to DRL-EC3 and distributed-DRL in terms of fairness, coverage score, and energy consumption. These models converged to a final reward value in all network configurations, and this ensured the validity and the adaptability of the models. In future work, we will try to change the style of the action list and study the new behavior of the model. Furthermore, we will consider a variable velocity for the UAVs instead of a constant value.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}