This subsection is structured into three parts, namely the quantitative discussion that explains the statistics obtained in the previous section, the qualitative discussion that remarks on the observation from the fitting results, as well as the limitations of the study.
4.1. Quantitative Discussion
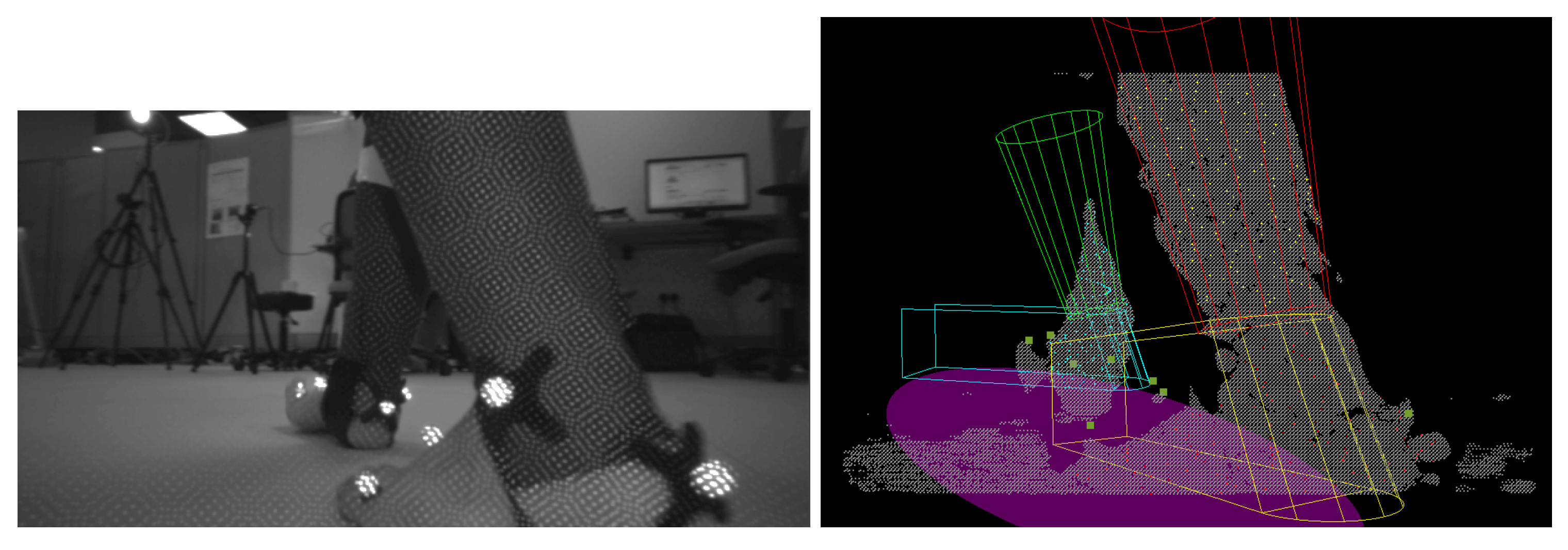
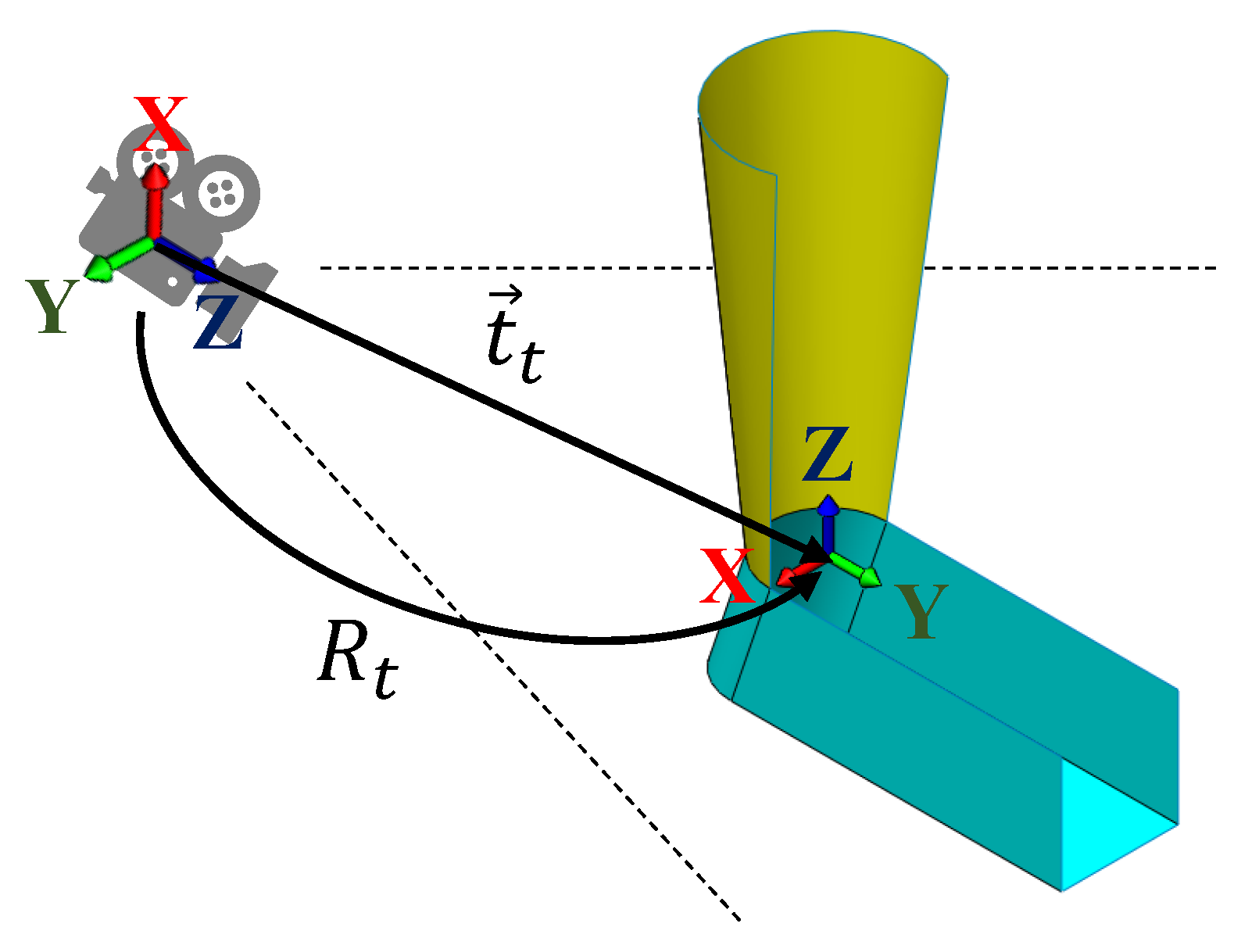
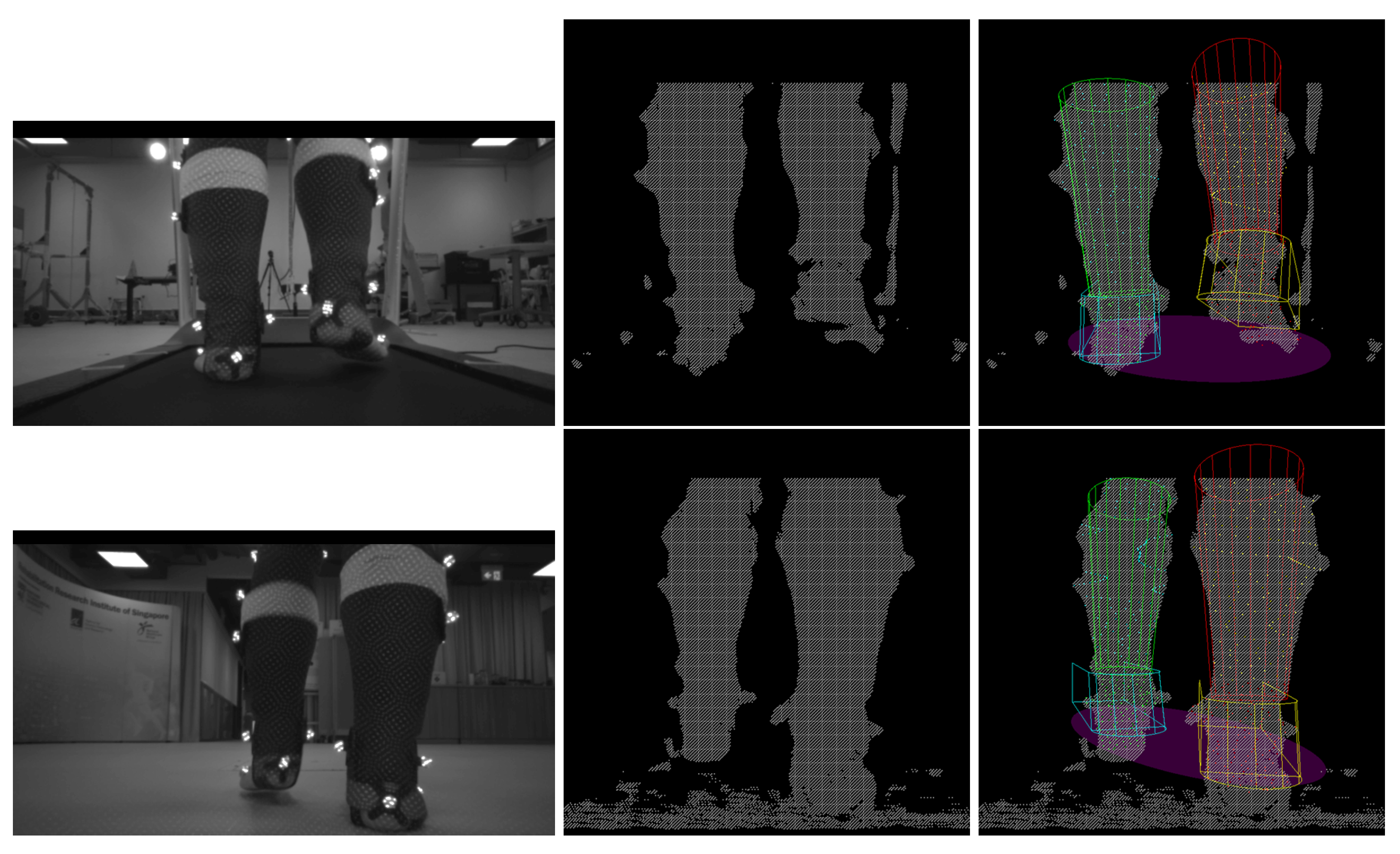
To have a complete view of both the back and the side of the feet, the subjects were required to start each recording with the pose shown in
Figure 8. This is when the transformation between
and
is found. However, as seen from the figure, the models, especially the right one, do not align properly to the observation as the side of the foot is not exactly a rectangular plane as described by the model. Hence, the transformation obtained in this configuration carries a degree of discrepancy and thus affects the comparison between the motion capture and proposed algorithm. Despite the discrepancy, the difference in starting poses between both feet does not pose a significant difference to the tracking results as seen in
Table 1. To obtain a more accurate fitting, a different model that follows the actual shape of the foot may be necessary. This may require more shape parameters to describe the model. Nonetheless, the side view of the foot is rarely seen unless the subject is performing a turn, which may not be the most common scenario in the application.
The static fitting errors are found to be less than
and 14 mm for rotational and translational errors, respectively. The static pose errors may be caused by a few factors, such as modeling error, sensor noise, IR markers compromising the shape of the lower limbs, time synchronization error between the two camera systems, and the transformation error between
and
. Nevertheless, as the average human foot length is 263 mm and 238 mm for the male and female, respectively [
38,
39], resulting in less than 6% error, the discrepancies are perceived to be acceptable.
During the walking trials, the pose errors increase with the walking speed as the tracker is unable to follow the fast movement of the lower limbs. Nonetheless, it is assumed that the algorithm is still relevant to the intended application of rehabilitation and assistive technologies, in which the users walk slowly [
29,
30,
31,
32].
As seen from
Table 1, the relative pose errors are smaller than the individual pose errors. This suggests that there exists some constant systematic errors in the individual fitting results, which are canceled out when computing the relative pose. The systematic error is hypothesized to be related to the transformation between
and
, as well as the synchronization between the two systems.
To show the effectiveness of the Foot-Shank model, a new method that computes the foot position directly from the point cloud clusters is examined. The object recognition of the new method is the same as the proposed algorithm except that no foot/shank separation is performed; the center of the grouped cluster is directly output as the foot position. The results are tabulated in
Table 5. The tracking errors are much larger than the case when the Foot-Shank Model is adopted (58 mm translation error compared with 30 mm for T04 trials). This shows that modeling the lower limbs helps to improve the accuracy and provides the foot orientations, which is necessary to compute the BoS accurately.
The large number of false negatives in gait detection in T04 is caused by undetected TOs. This is prominent in the low-speed treadmill cases as the stance foot moves along with the treadmill belt. The low speed causes the algorithm to be unable to identify the local minimum in the AP-distance of the foot because of the gradual changes, causing low recall and F1 score in T04. This shows that false negatives in low gait speed may be one of the limitations of the proposed algorithm, which may pose a problem in tracking gait impaired subjects.
The errors in gait parameters are significantly affected by the gait events detection of the system. As seen in
Table 3, the error can be as high as 76 ms. It directly impacts the accuracy of the cycle time, stance time, and swing time. In addition, the lower limbs may have been displaced significantly during this period, changing the relative position between the feet greatly and hence resulting in a different step length and step width. Among the gait parameters, step length is one of the major indicators for patient recovery. After physical therapy intervention for four to eight weeks, stroke patients can experience a change in step length ranging from 3 cm to 19 cm [
40,
41], while the change is 6 cm on average [
42]. Since the patients walk at 0.4–0.5 m/s [
42], the proposed algorithm can still identify the parameter change for most patients.
The errors in gait parameters are normalized by their ground truth gait parameters, i.e.,
, to have a better understanding of their significance (
Table 6). The errors in temporal parameters are 3%, 10%, and 14% for cycle time, stance time, and swing time, respectively. While the spatial parameters vastly differ from each other, the step length percentage error falls around 12%; the step width percentage error is higher as the step width is much shorter than the step length.
One may question why the gait parameter accuracy measured in OW is poorer than T10 despite having a better pose tracking accuracy. During OW, some subjects were seen to adopt unnatural gait behavior of near-tandem walking, presumably affected by the human-robot interaction. This often causes the swinging leg to be obstructed by the lagging leg at the moment of HS. The current algorithm has limitations in handling such obstruction, leading to a larger tracking error at such instances. When the pose of the foot around the instance of HS cannot be determined accurately, the accuracy of the HS timing and the gait parameters computed at the instance are thus impacted. The near-tandem walking also resulted in a very small step width (<30 mm), yielding a large step width percentage error in the case of OW (>126%).
In Visual3D, the relative distance of the feet is computed between the “proximal end positions of the feet”, which is the point of connection between the Visual3D shank and foot model. This may be different from the proposed algorithm in which the distance is computed according to the origin of the Foot-Shank Model. The difference in the definitions may be one of the factors of the spatial gait parameter errors.
4.2. Qualitative Discussion
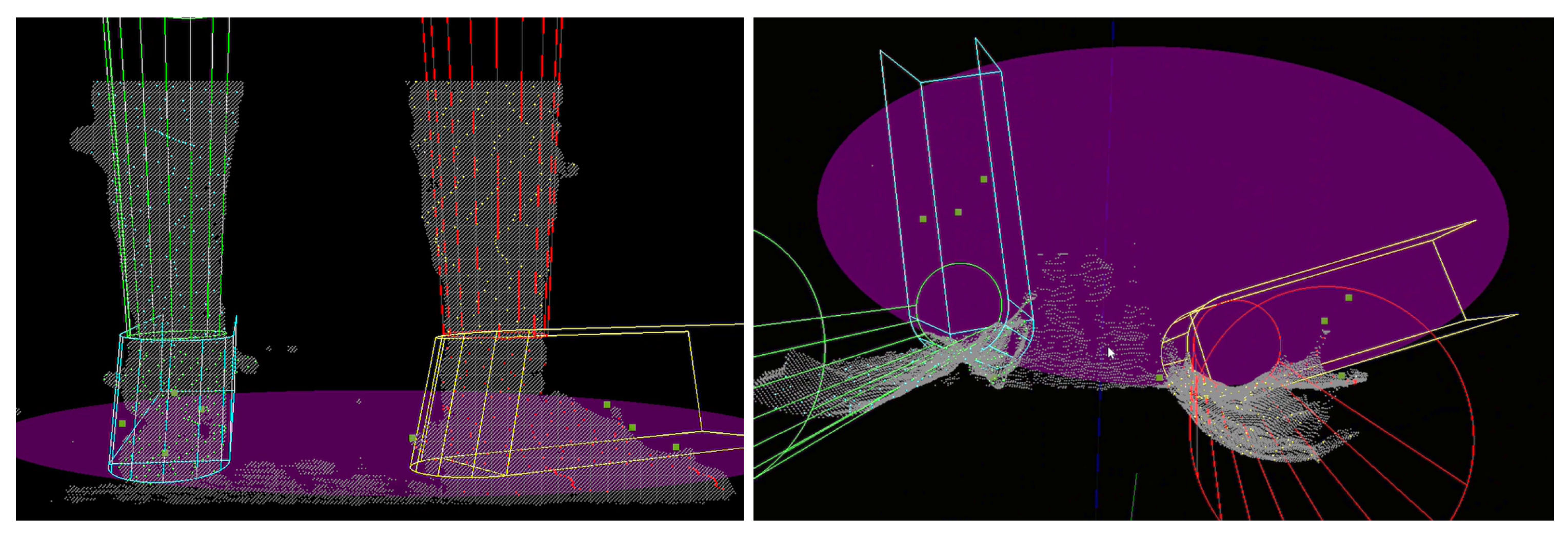
There are instances where the foot was so close to the camera that it moved out of its sensing range, making it unseen while blocking the other foot, as shown in
Figure 9. This is commonly found during high gait speed or during OW in which the subject walked in a tandem fashion. A camera with a closer sensing range may be necessary to mitigate the problem.
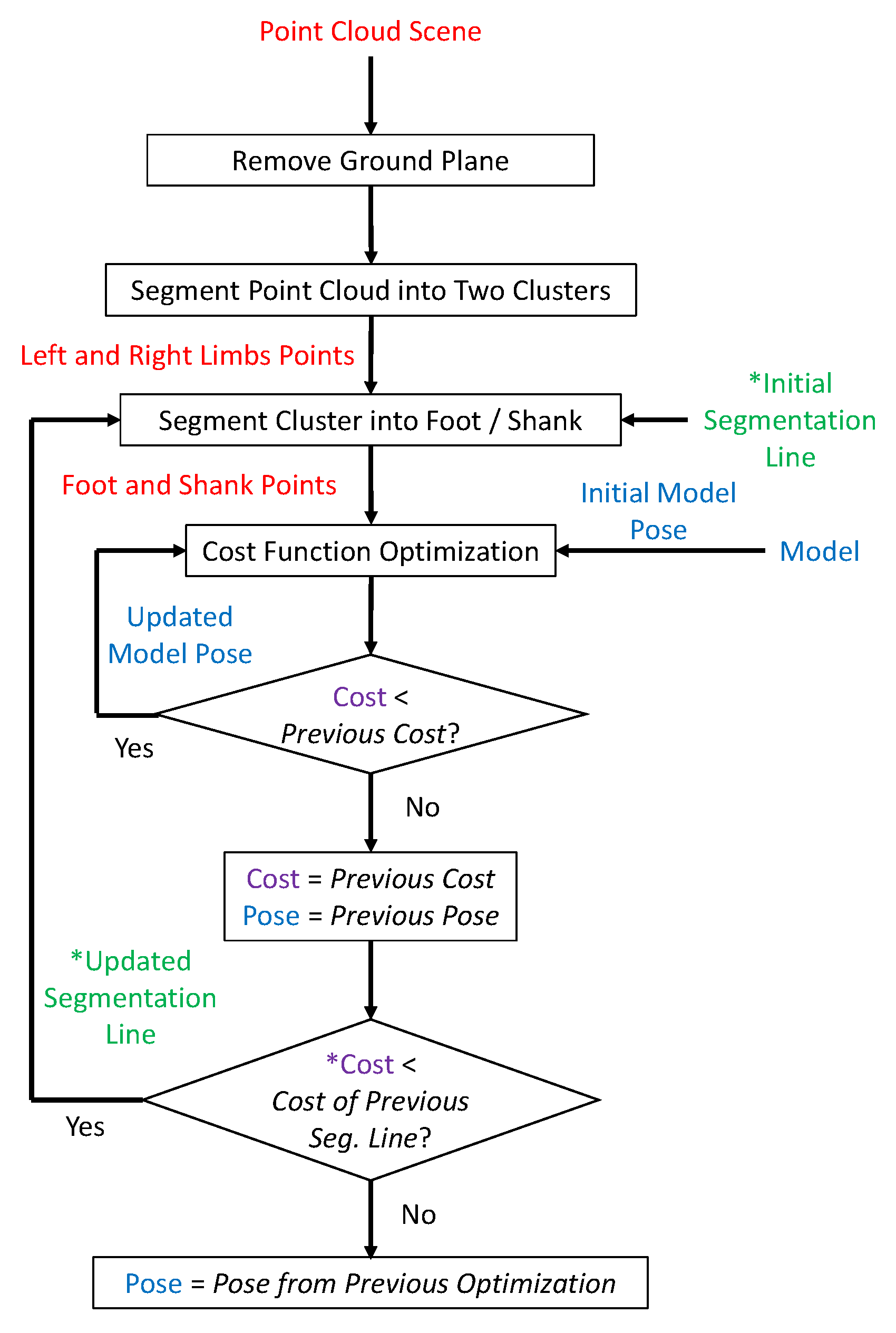
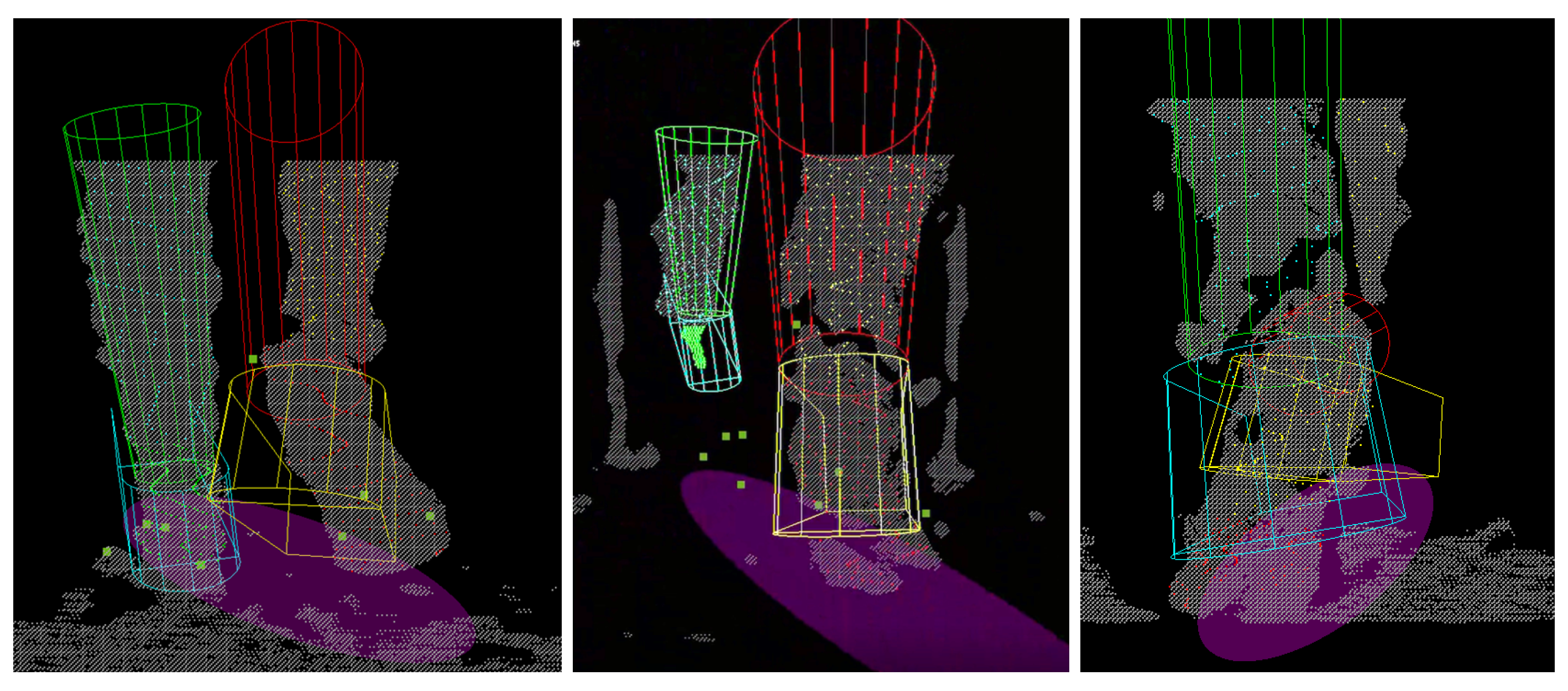
During the toe-off, the foot was often observed to be in plantar-flexion. The algorithm was unable to conform to this pose when the tilting angle was too large, causing the orientation of the model to be inaccurate (
Figure 10, Left). This was caused by two reasons. Firstly, in the current algorithm, the Foot-Shank Separation Line starts at the bottom of the point cloud cluster and advances upwards as the optimization cost decreases. If the optimization cost increases with the new line, the process stops, and the previous line is determined as the actual Separation Line. When the foot is pointing down during toe-off, the separation line is often located at a higher position in the image. Hence, it is unlikely for the output cost to decrease monotonously throughout the iterations. One alternative is to perform fitting with multiple separation lines, which is too time-consuming for the application. The second reason for the misfit is the shank orientation cost imposed in Equation (
12), which prevents the model from following the tilt of the shank. However, the cost function is necessary to maintain the shank in an upright position; the model was seen to flip over when the term was disabled.
Occlusion between the legs was also common in normal walking even when the feet were not in camera proximity. While the tracking could be suspended if the other limb was completely obstructed, this was not commonly the case; in most scenarios part of the limb was still observable, causing erroneous results as the algorithm was unable to detect which part of the lower limb was occluded. As shown in (
Figure 10, Center), the right foot obstructed the left foot in front, leaving only the shank to be visible. The left model was then “forced” to move up to align to the sampled points. The system should be improved to handle such situations more robustly by recognizing which part of the lower limb is present in the image.
Moreover, as the object moves closer to the camera, the image may fracture into multiple pieces, posing an issue to the current algorithm as the system is unable to correctly cluster the fracture parts to the correct limb (
Figure 10, Right). This poses an issue in the identification algorithm which identifies the left and right limbs by sorting clusters of point clouds into two groups. In some cases, the fractured clusters may be sorted into the wrong limb, forcing the model to fit to the points which are on the other lower limb. A more robust object identification algorithm is necessary to overcome the problem, such as using machine learning in image recognition. Notwithstanding, albeit having high accuracy, such a machine learning algorithm often requires the use of GPU, which increases the cost of the assistive devices.
4.3. Limitations
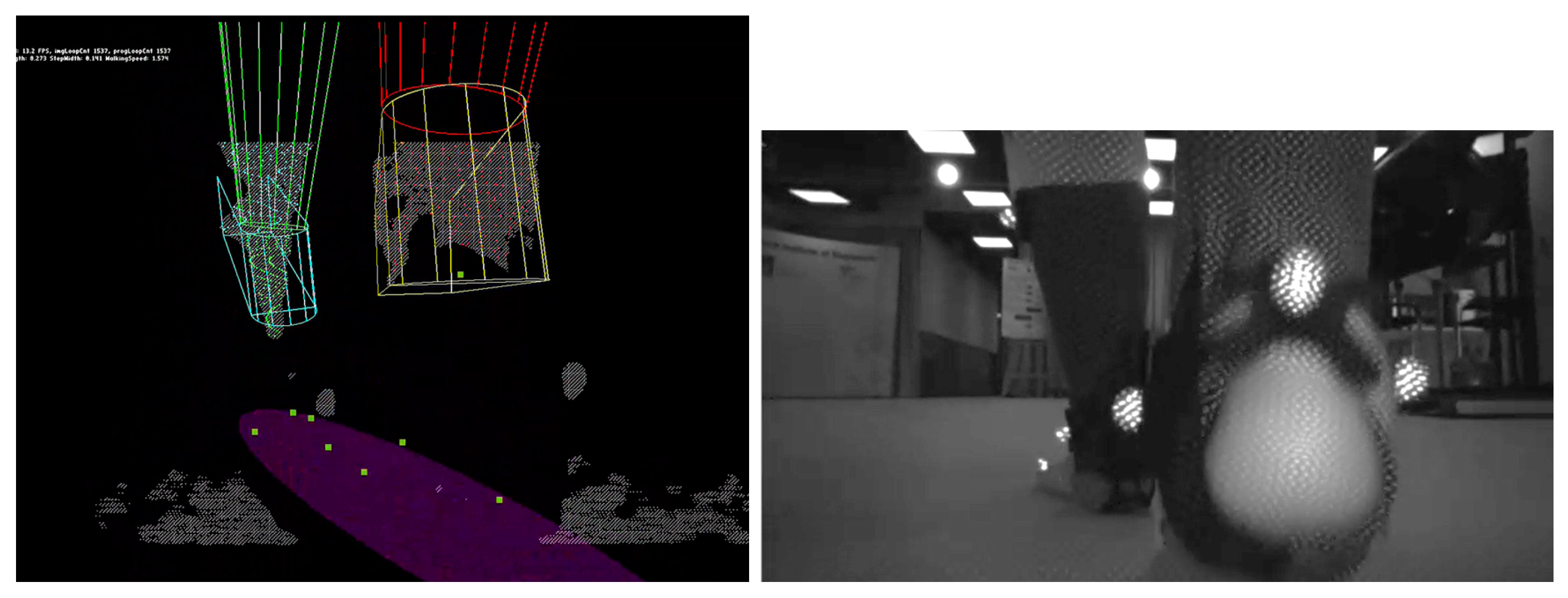
Although turning motion is not studied in this paper, the condition was recorded during the experiment. In the current algorithm, the left and right limbs are determined by their relative positions in the depth image. While this may be appropriate in the case of treadmill use, it poses a problem in overground turning motion in which the feet swap positions, as shown in
Figure 11. An alternative method is necessary to localize the lower limbs. A simple idea is to infer the moving direction of the subject from the motion of the robot. In the case of turning, the feet may be tracked with the help of their previous positions; otherwise, the feet are assumed to be located at their expected positions in the image.
The runtime of the object identification and optimization requires more than 40 ms, which is slower than the update frequency of the RGB-D camera. Although the runtime can be reduced by subsampling the image into a lower resolution, the program may still not be fast enough to capture fast motion in case of higher gait speeds. Nonetheless, this may not be a critical problem in the application as the system is designed for gait impaired subjects who walk slowly.
The algorithm has only been tested with healthy young subjects with no known locomotion disability. While slow-walking generally yields better results (< and 35 mm fitting error for rotation and translation, respectively), it is unknown if the performance will be the same for patients with pathological gaits. The error in gait parameters (as high as 30% for step width) shows that it is significantly affected by the accuracy of HS and TO detection timing. The slow motion of patients may pose an issue to the current gait events detection algorithm, as seen in the large number of false negatives in T04.
The algorithm assumes that the only objects in the scene are the lower limbs of the user. While tracking will be affected by walking aids, such as walkers and canes, such equipment may not be necessary when the assistive robot is maintaining the balance of the user. Nevertheless, the system may need to be improved to handle scenarios in which the user is wearing long loose pants that will compromise the rigid object tracking.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}