
Design and Analysis of a 2-DOF Electromagnetic Actuator with an Improved Halbach Array for the Magnetic Suspension Platform

 ,
,
Abstract
:1. Introduction
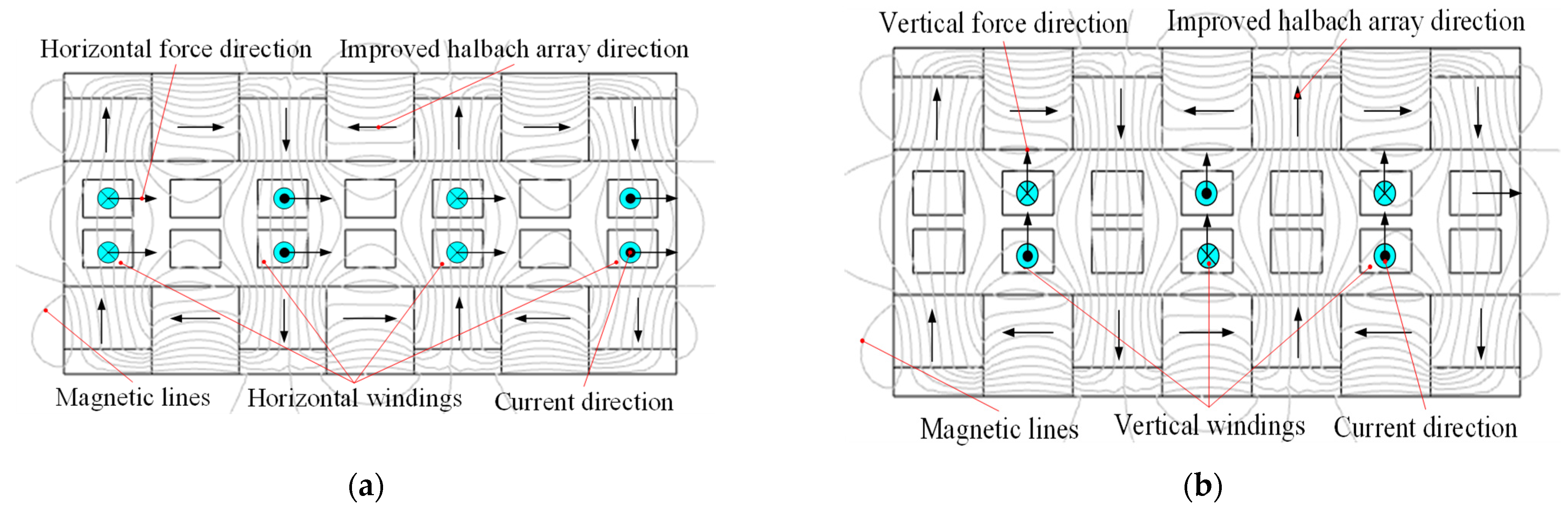
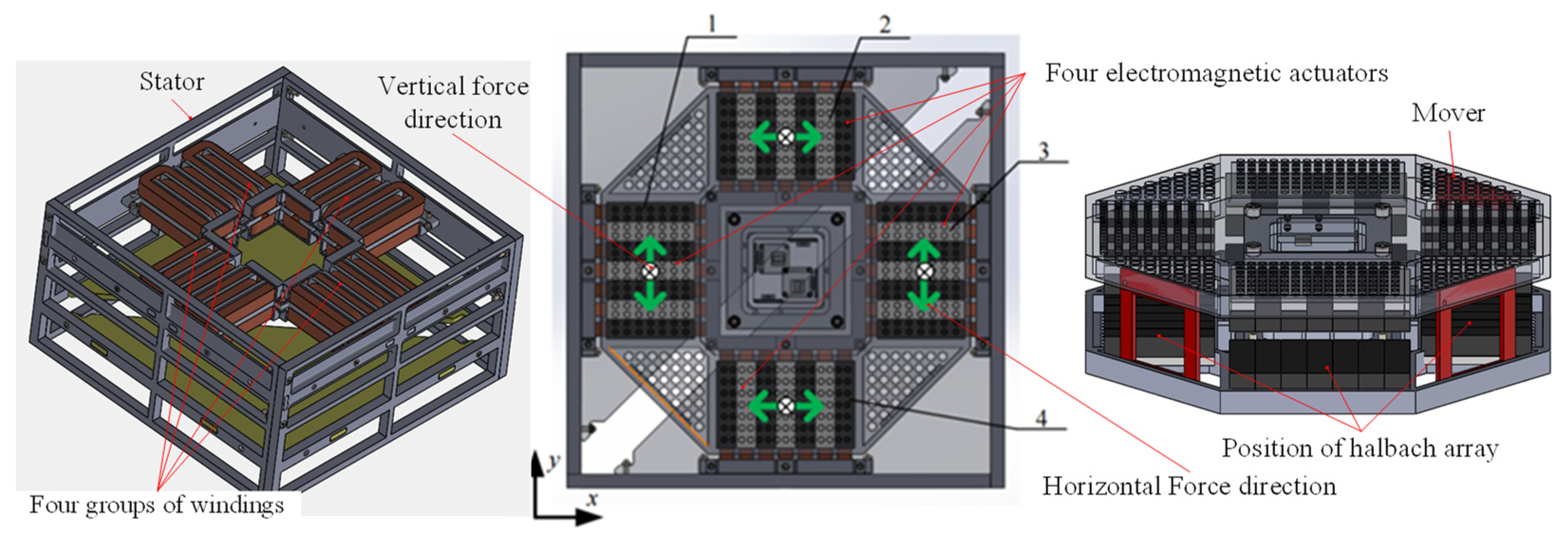
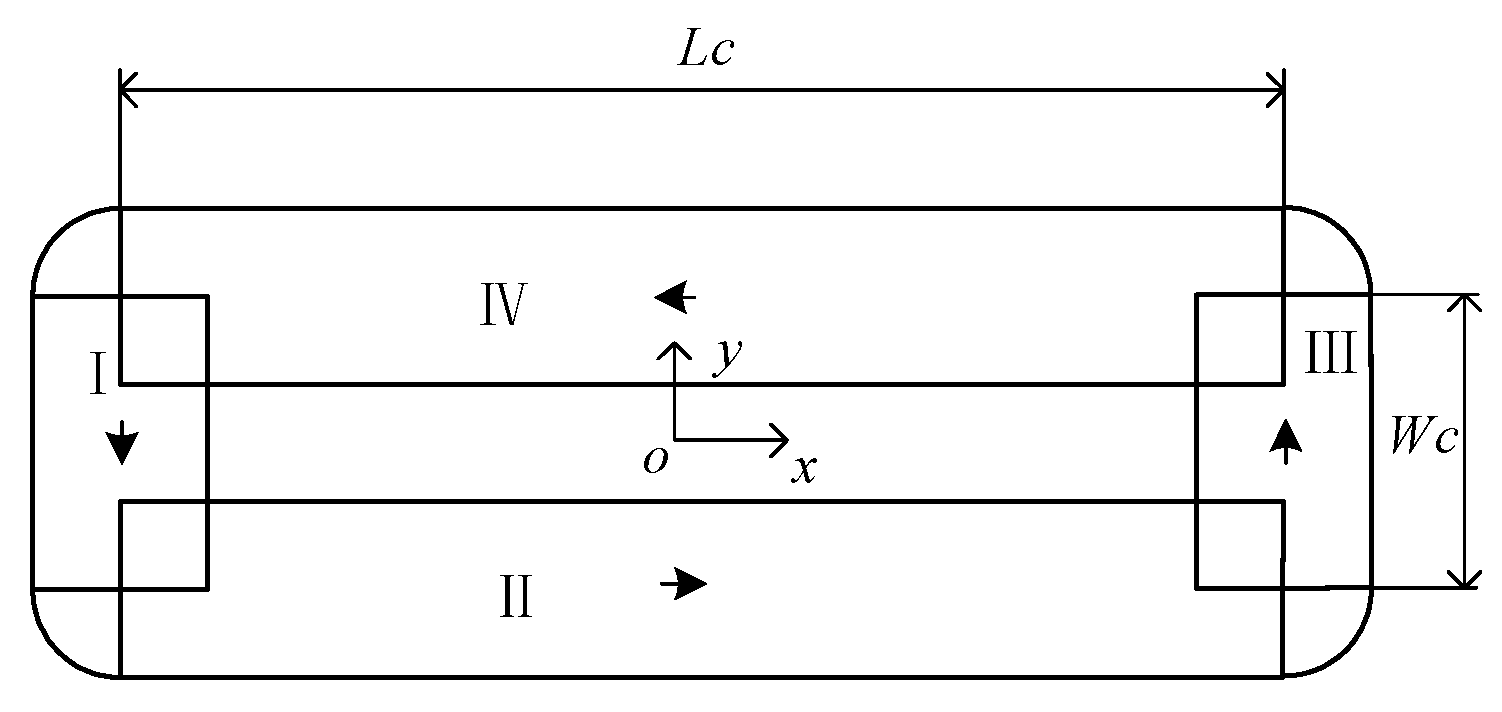
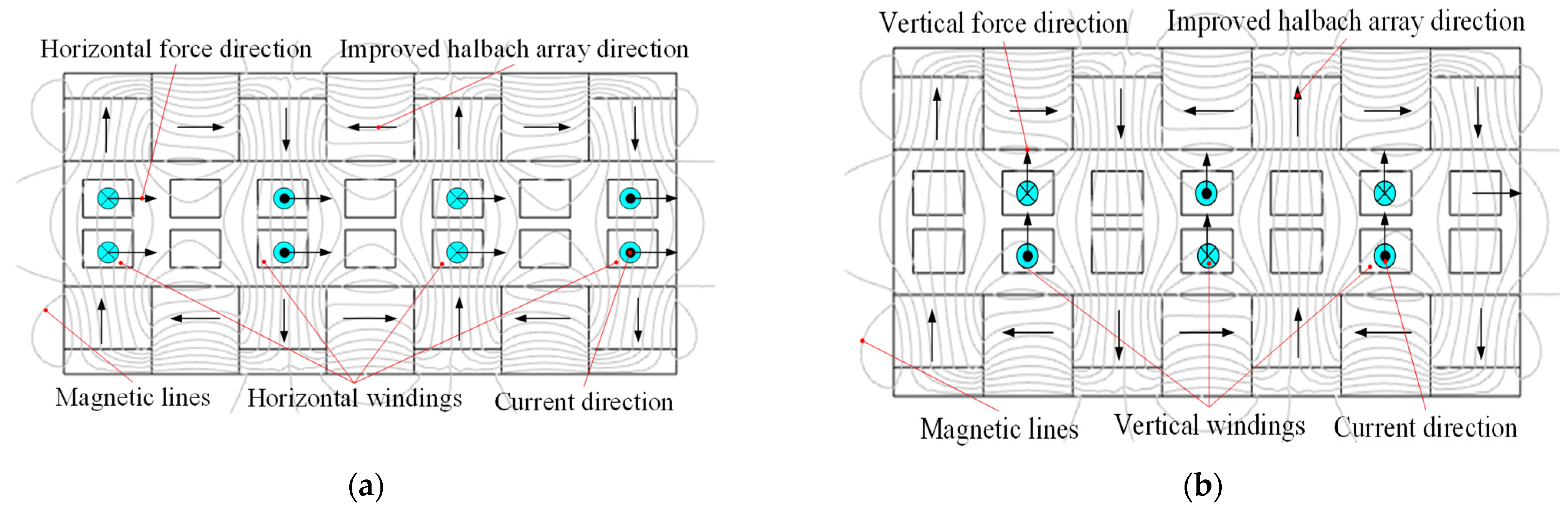
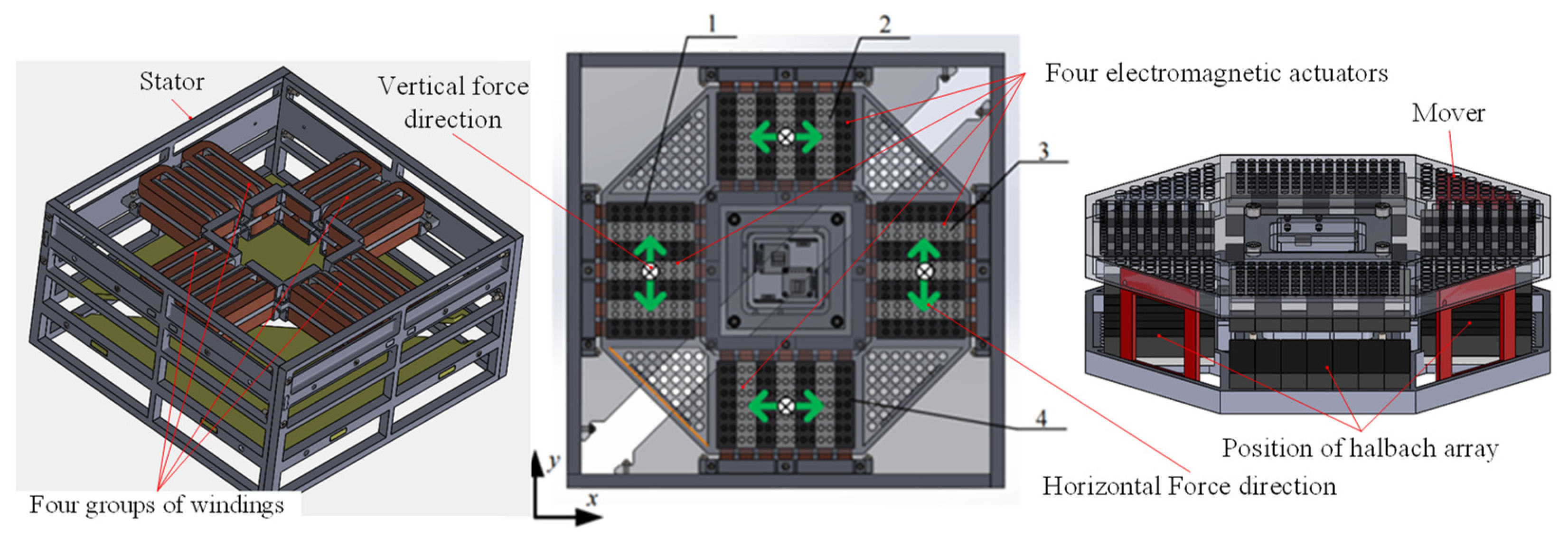
2. Structure and Working Principle
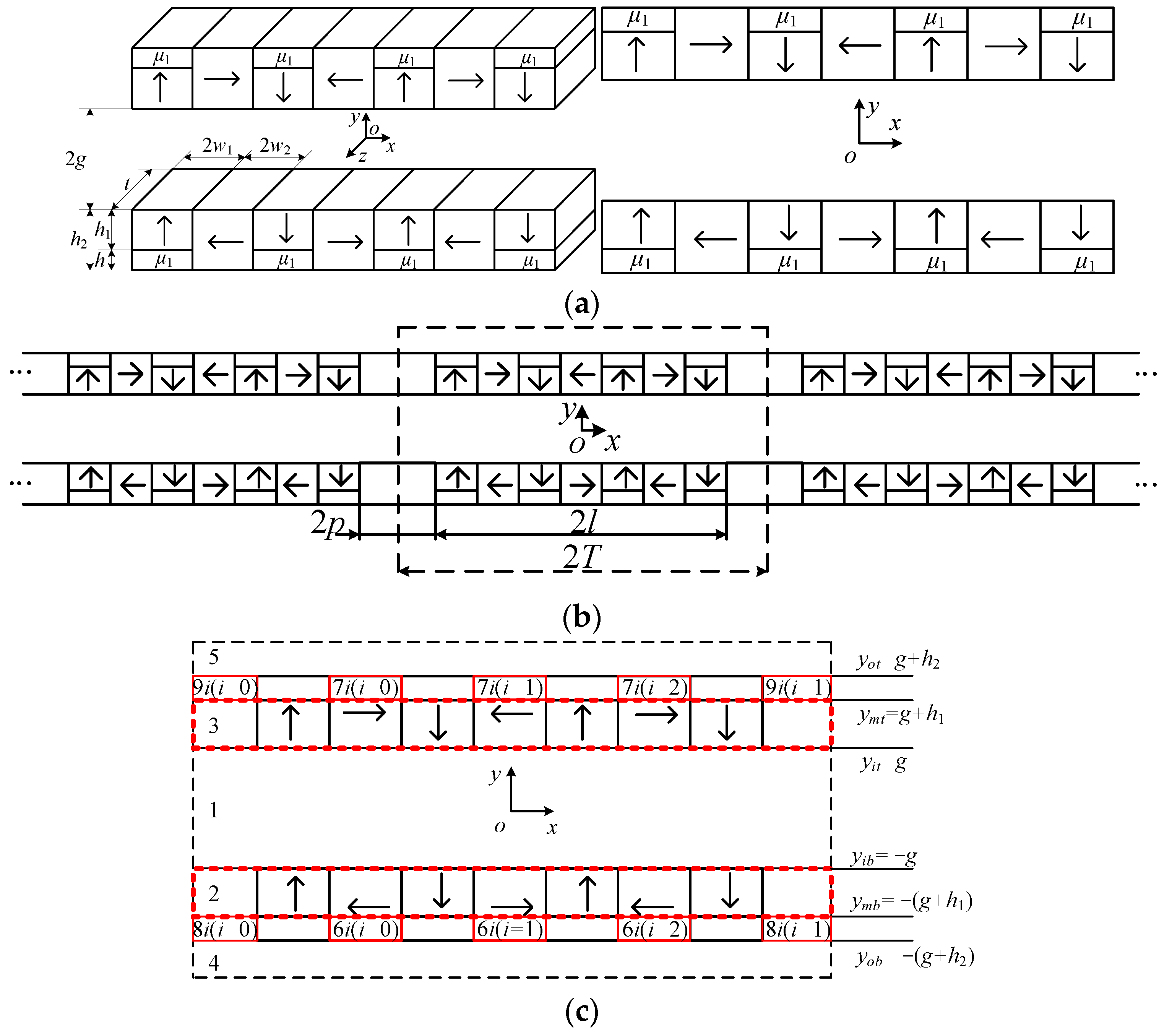
3. Electromagnetic Model
3.1. Subdomain Model
3.2. Electromagnetic Force Model
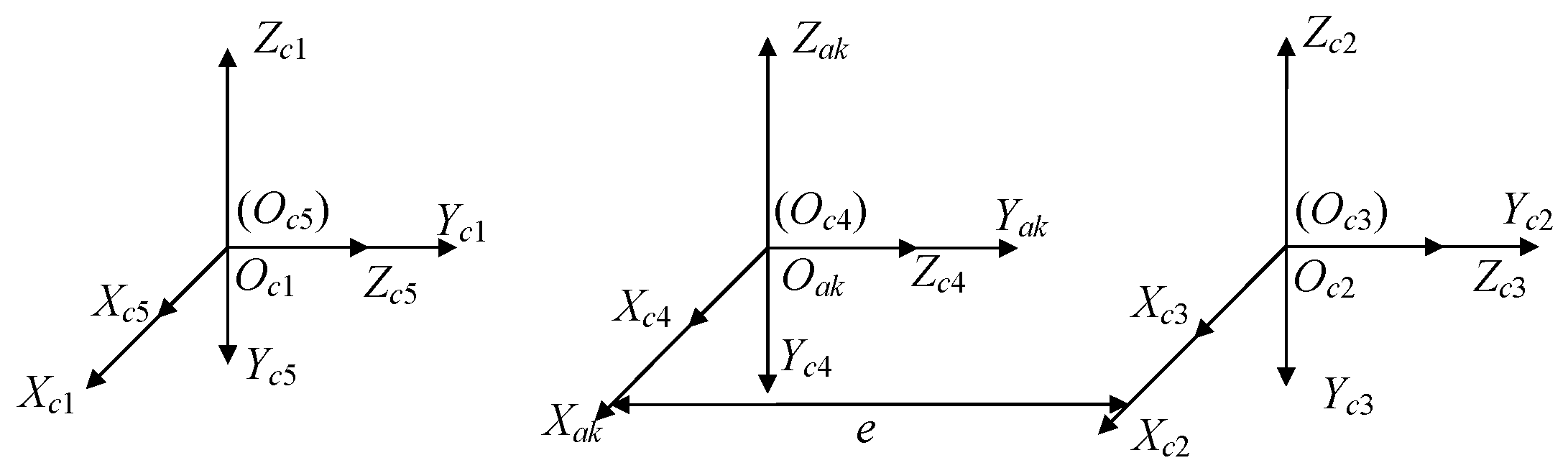
4. Measurement Model for the Platform
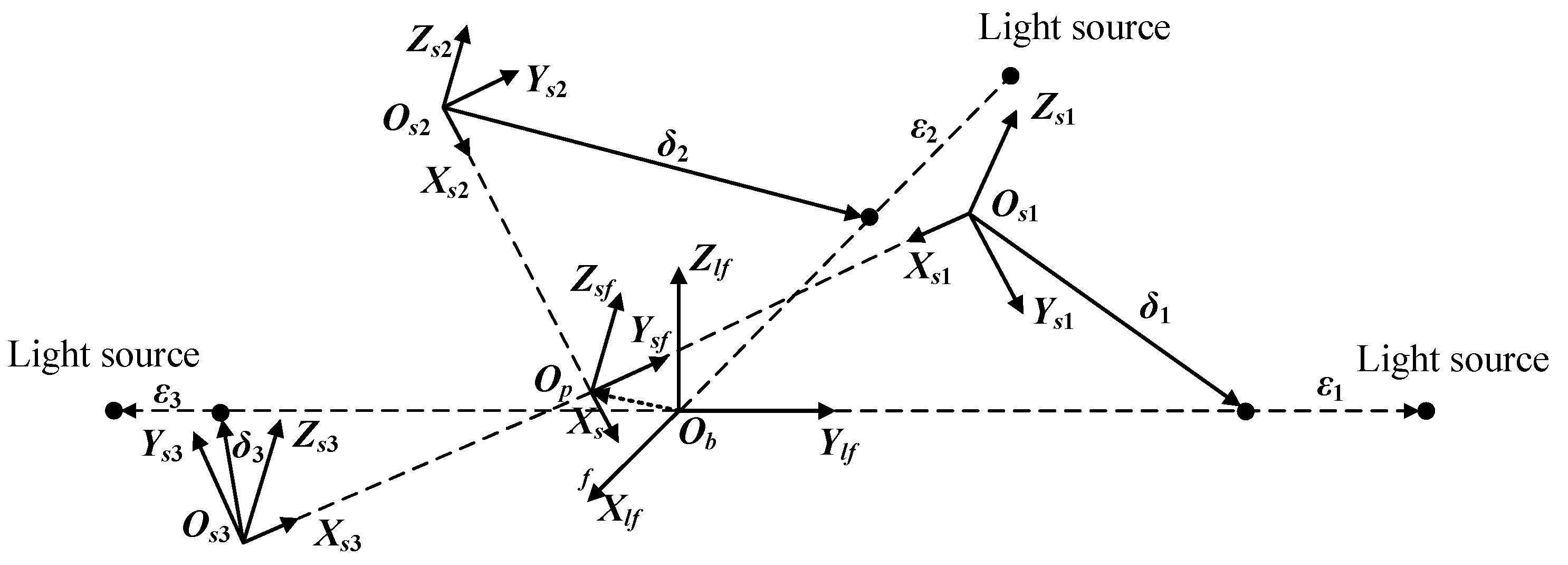
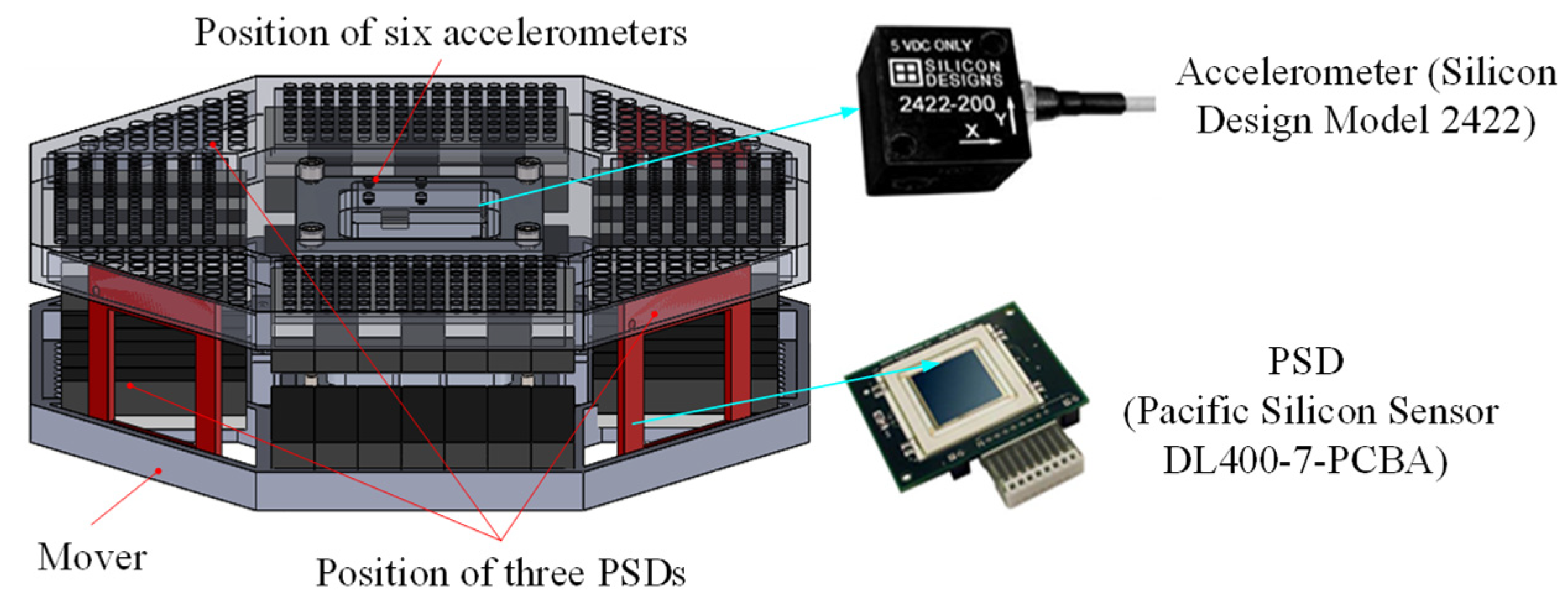
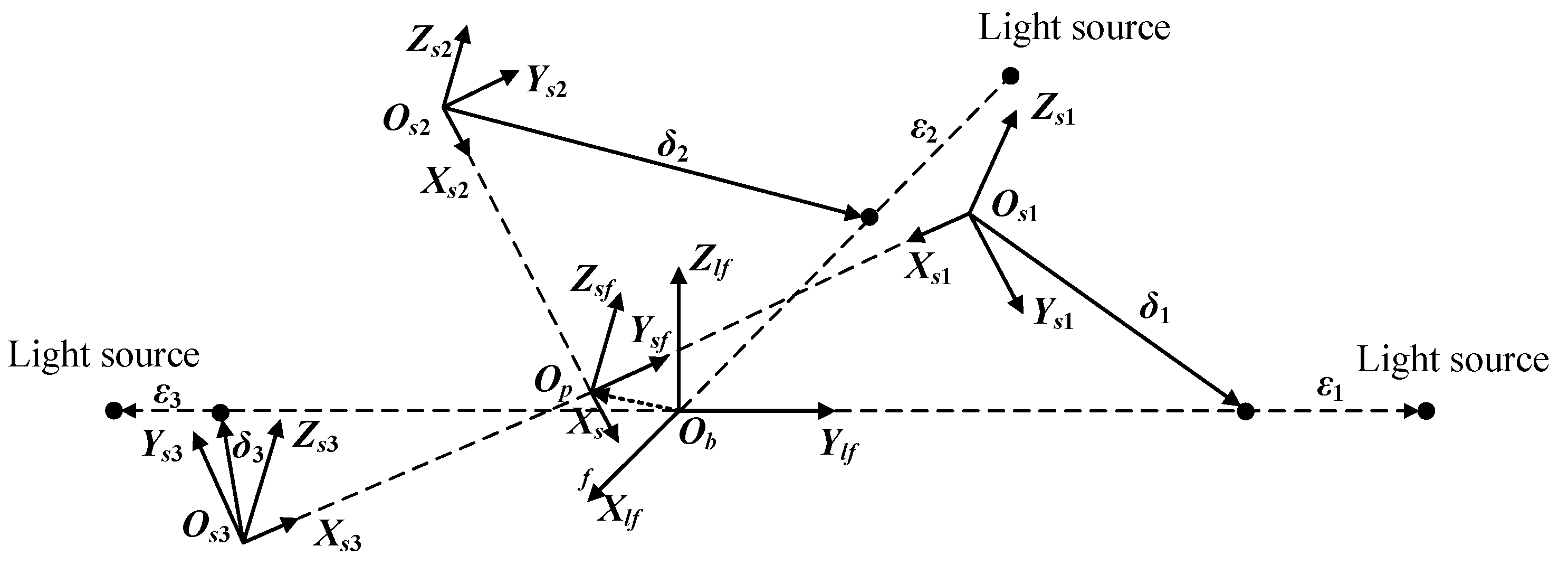
4.1. Position Measurement Model
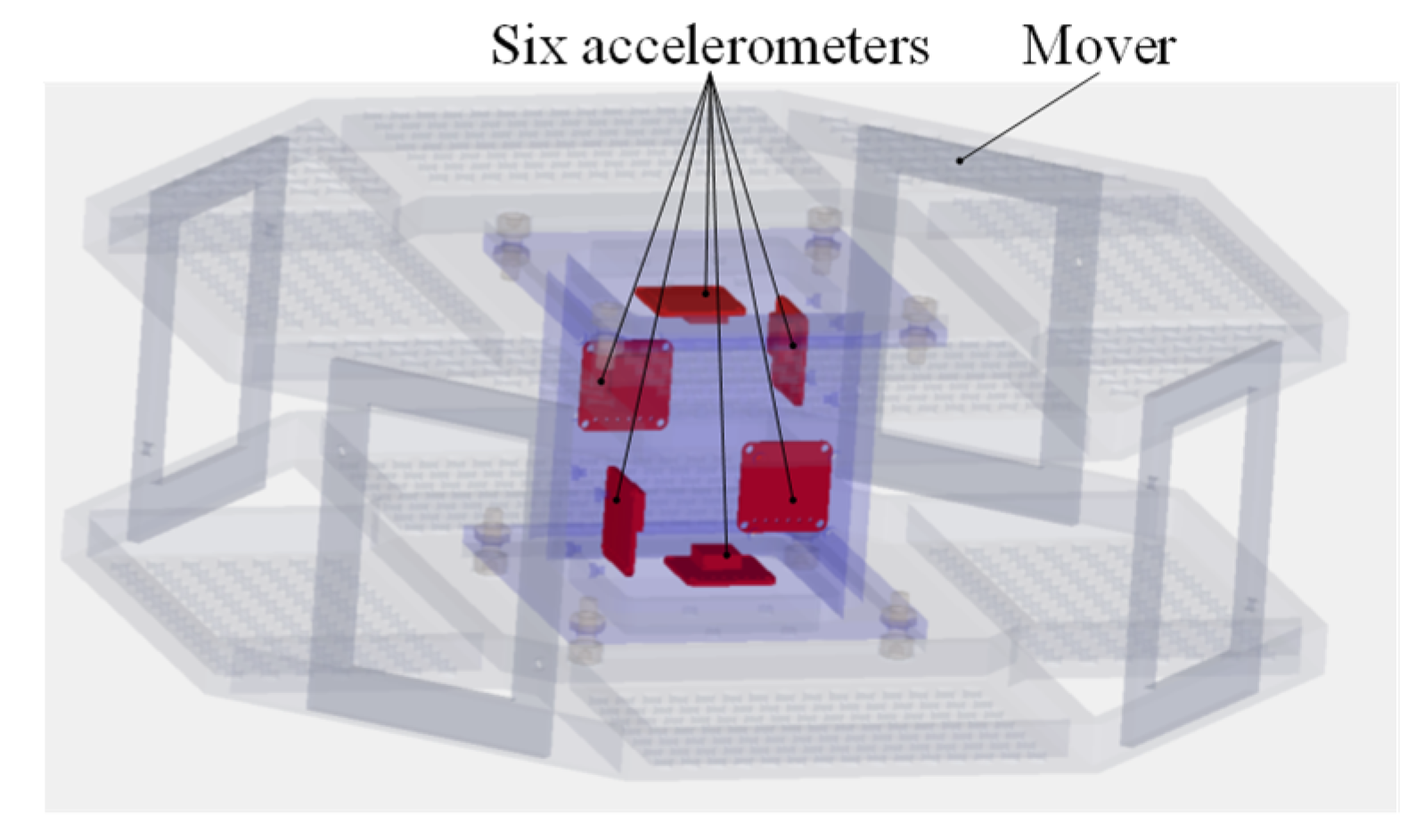
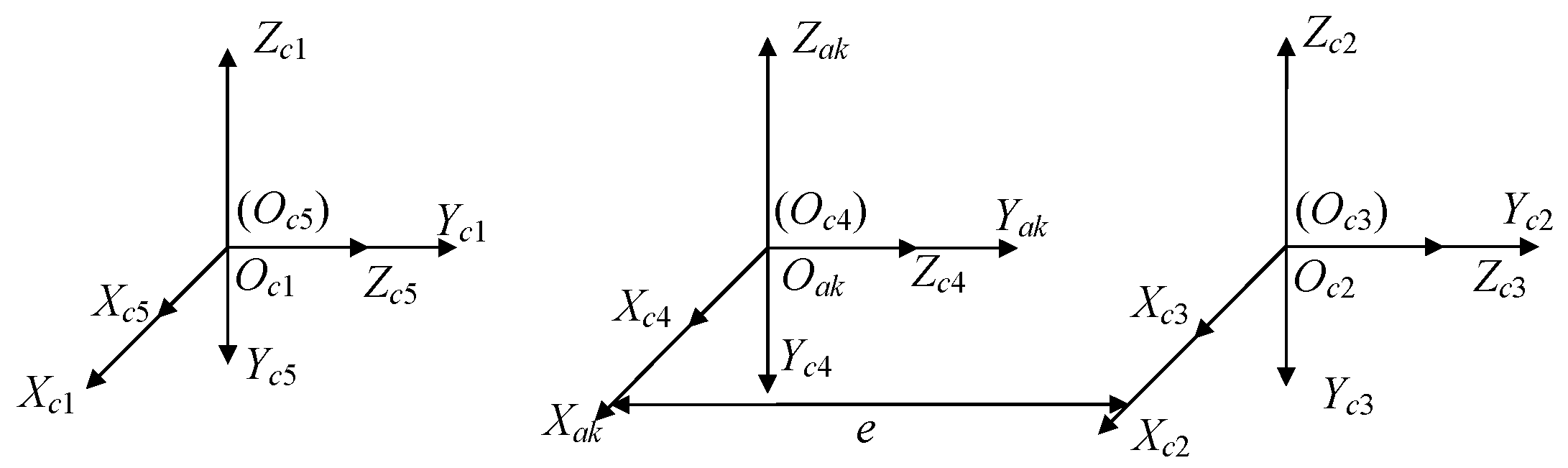
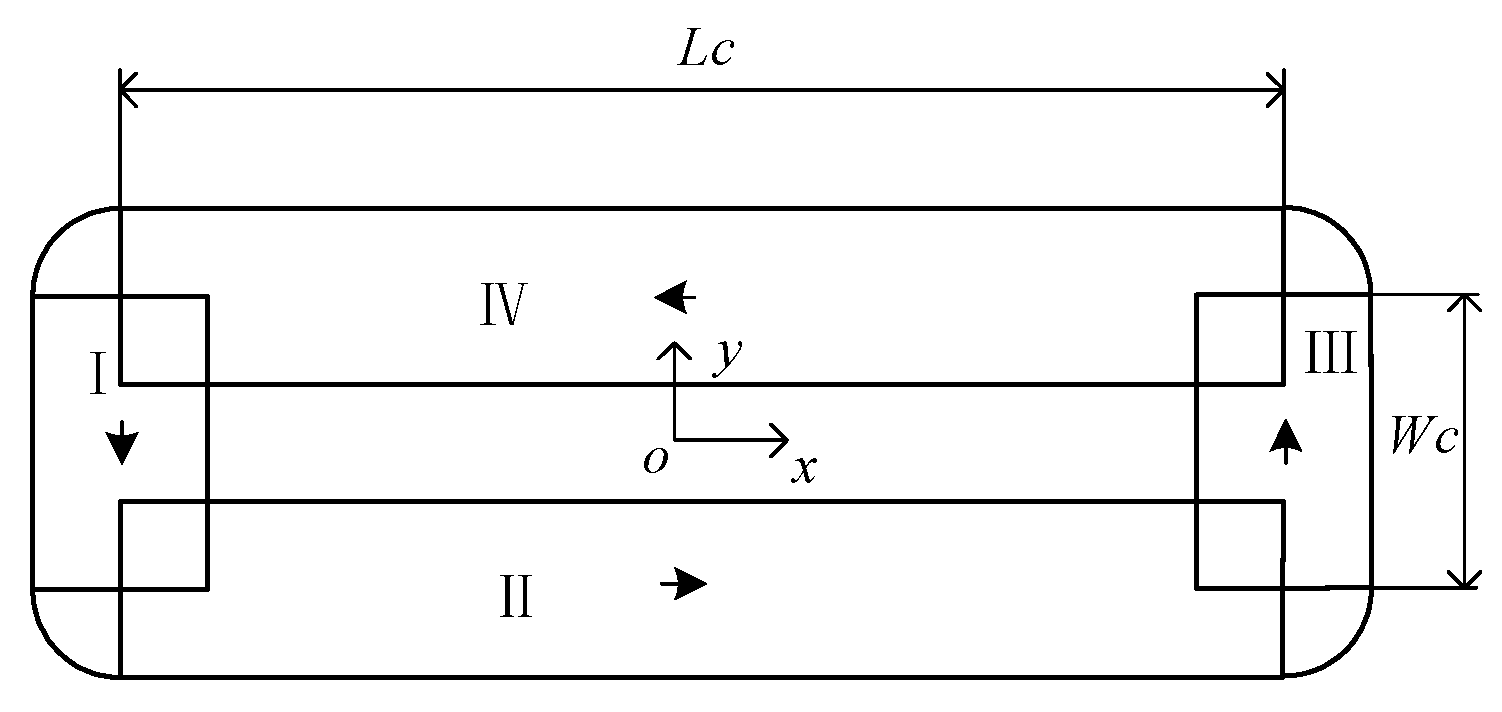
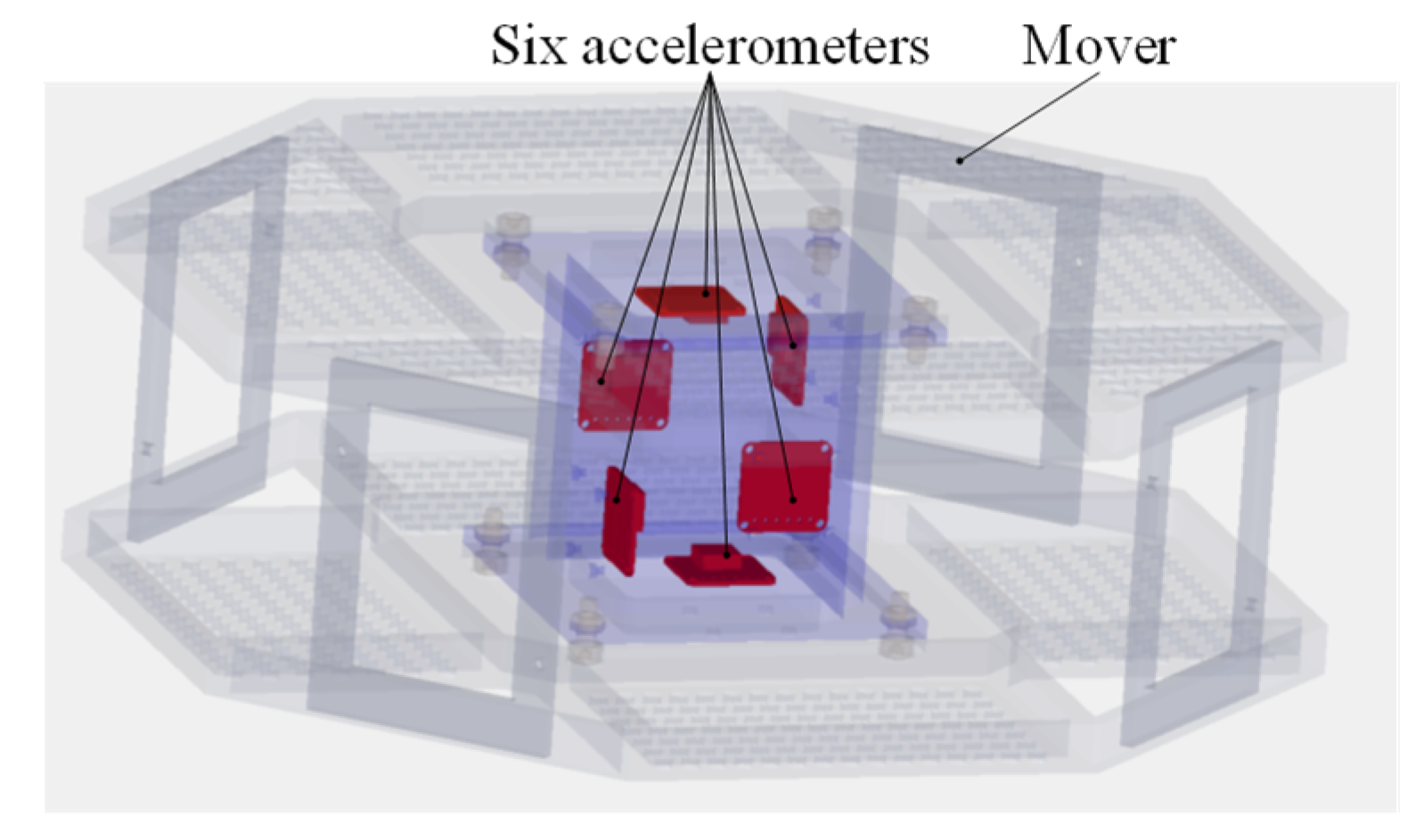
4.2. Accelerometer Measurement Model
5. Analysis of Electromagnetic Characteristics
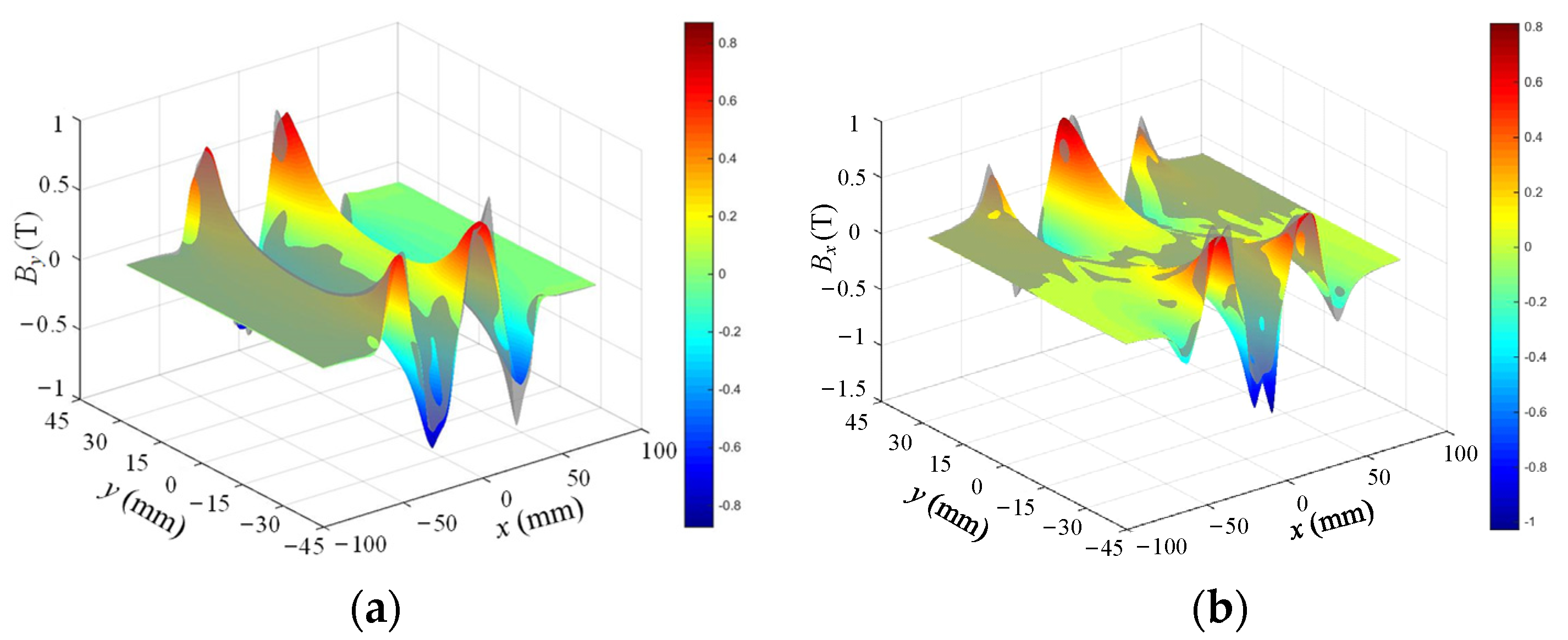
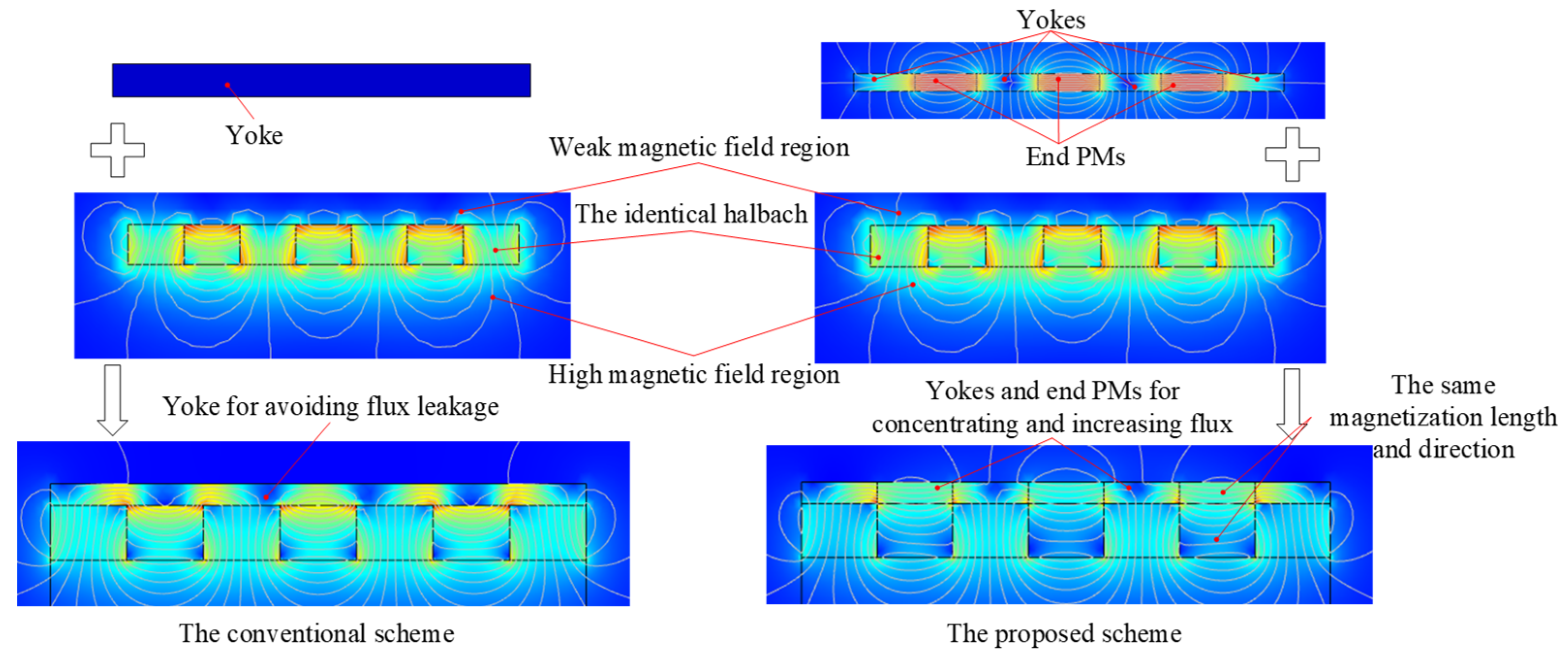
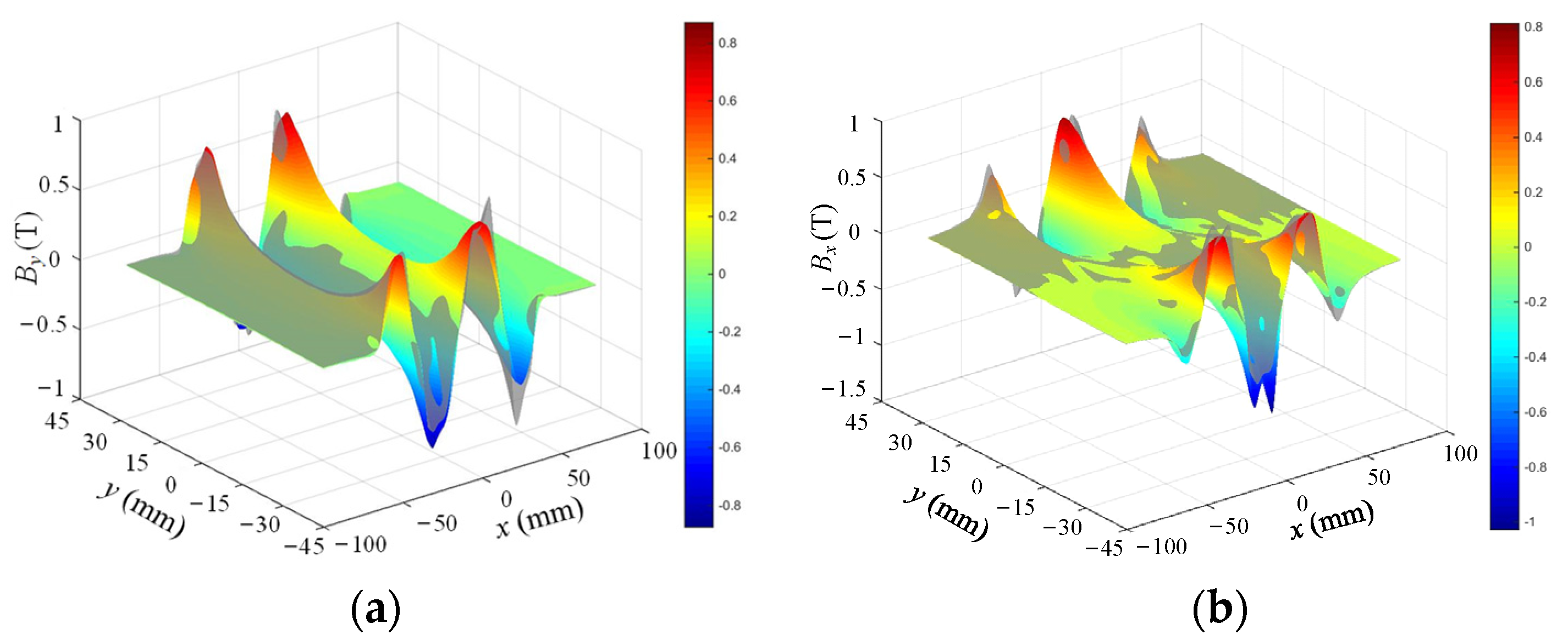
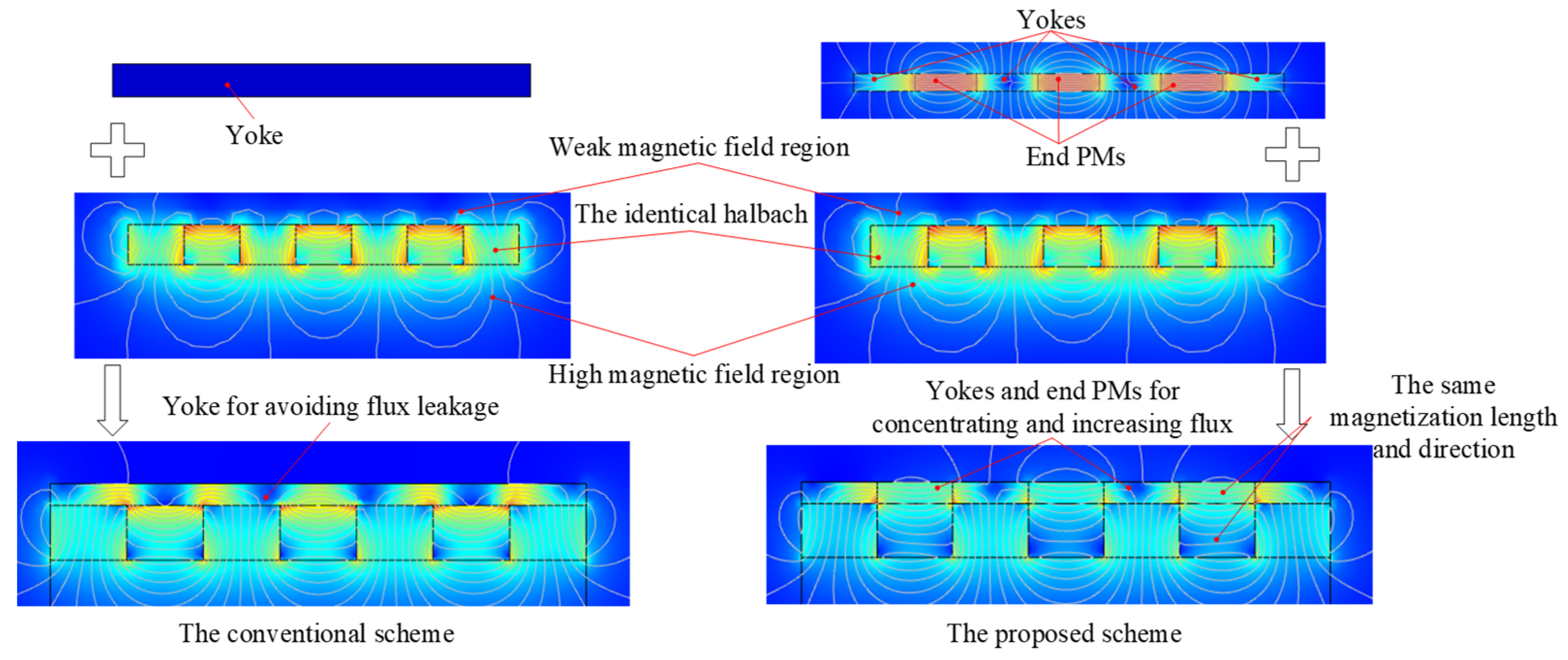
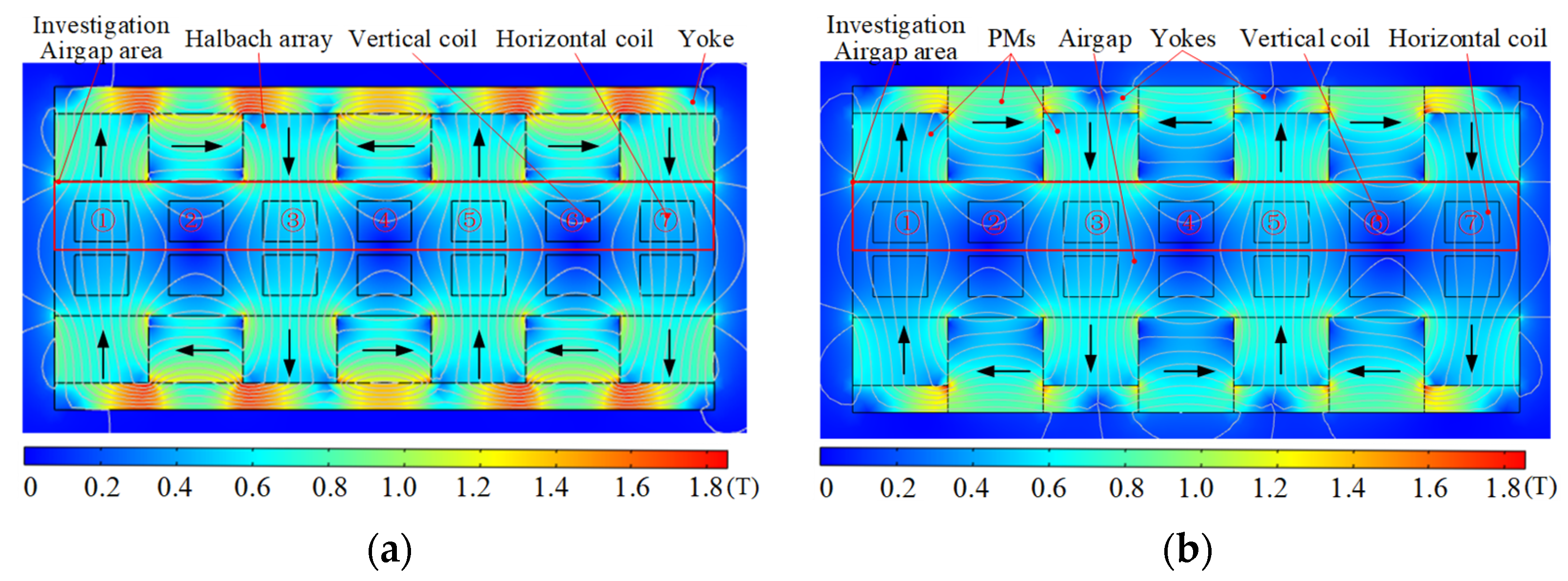
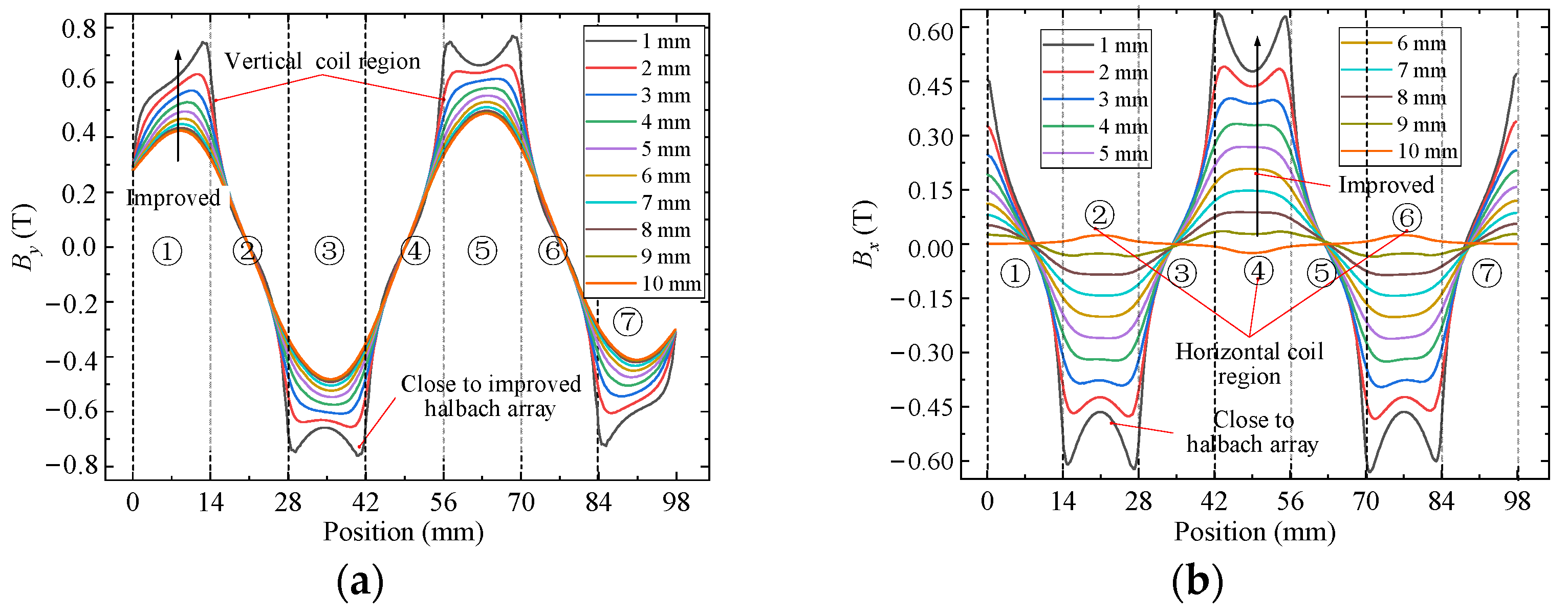
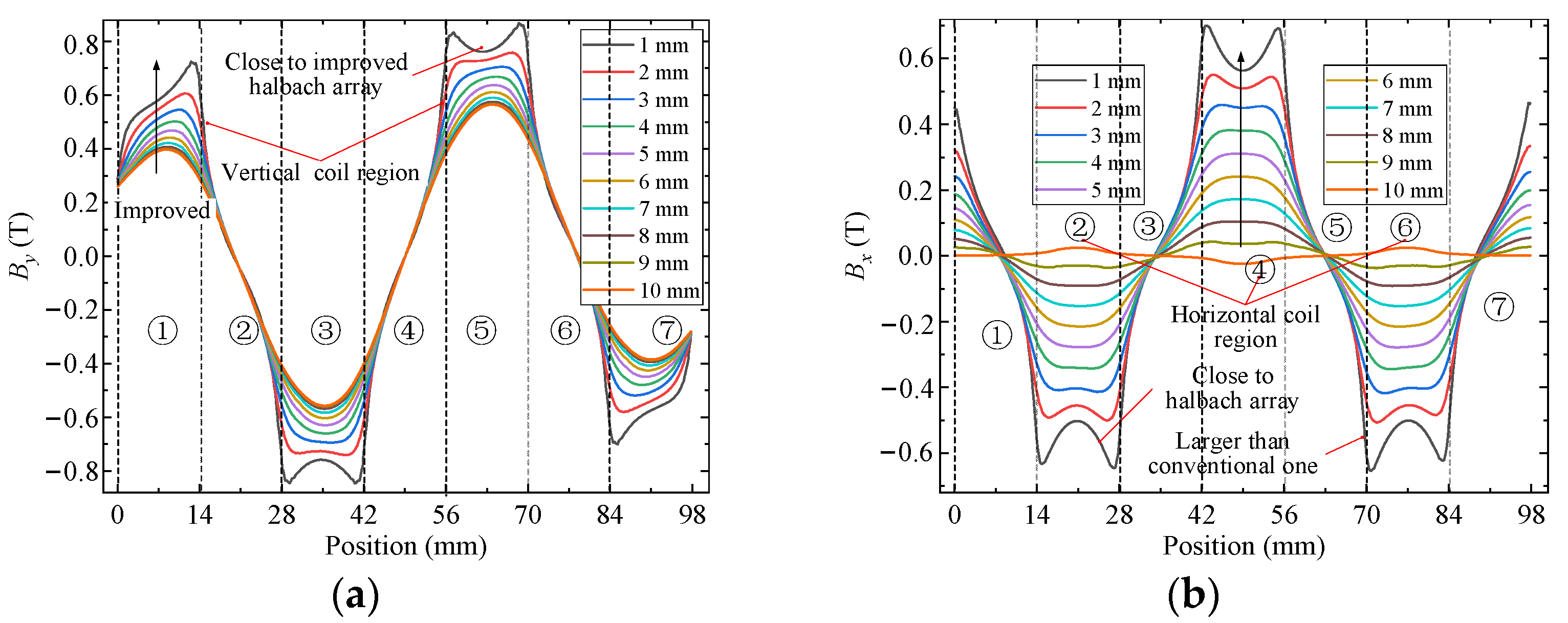
5.1. Magnetic Flux Density
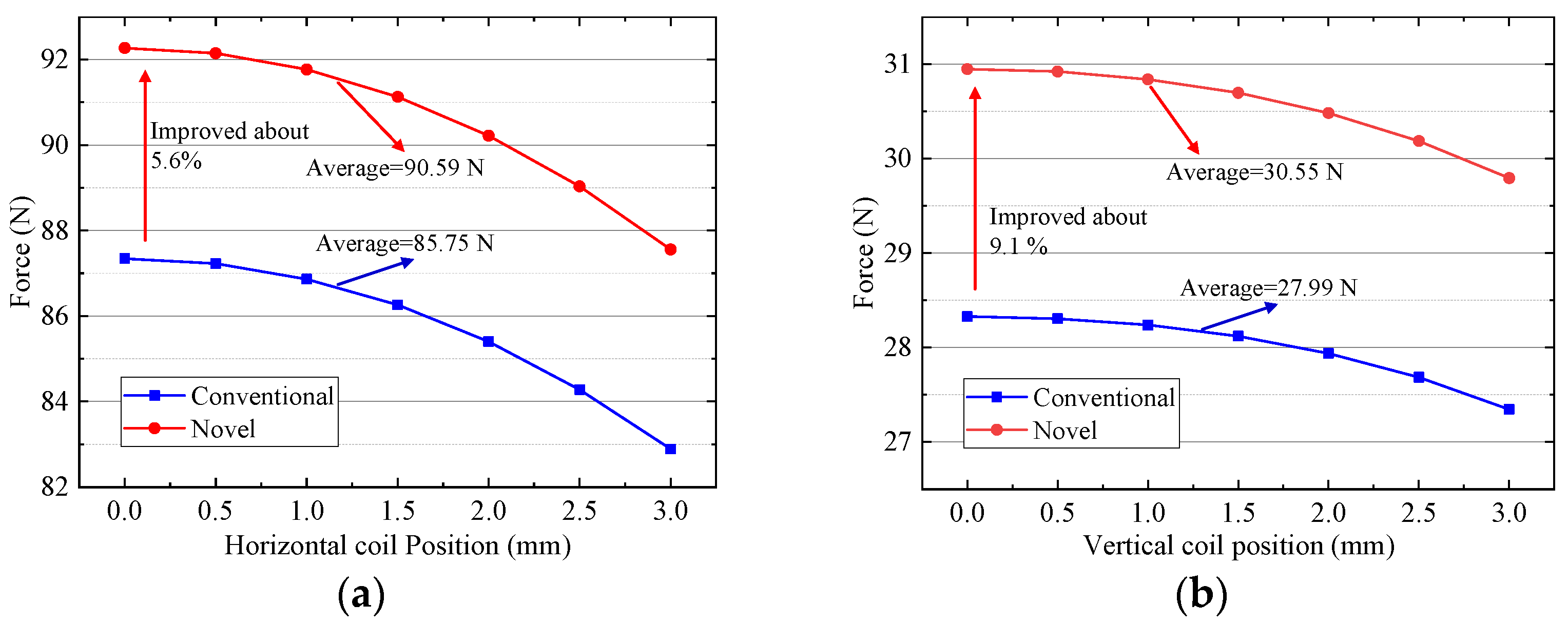
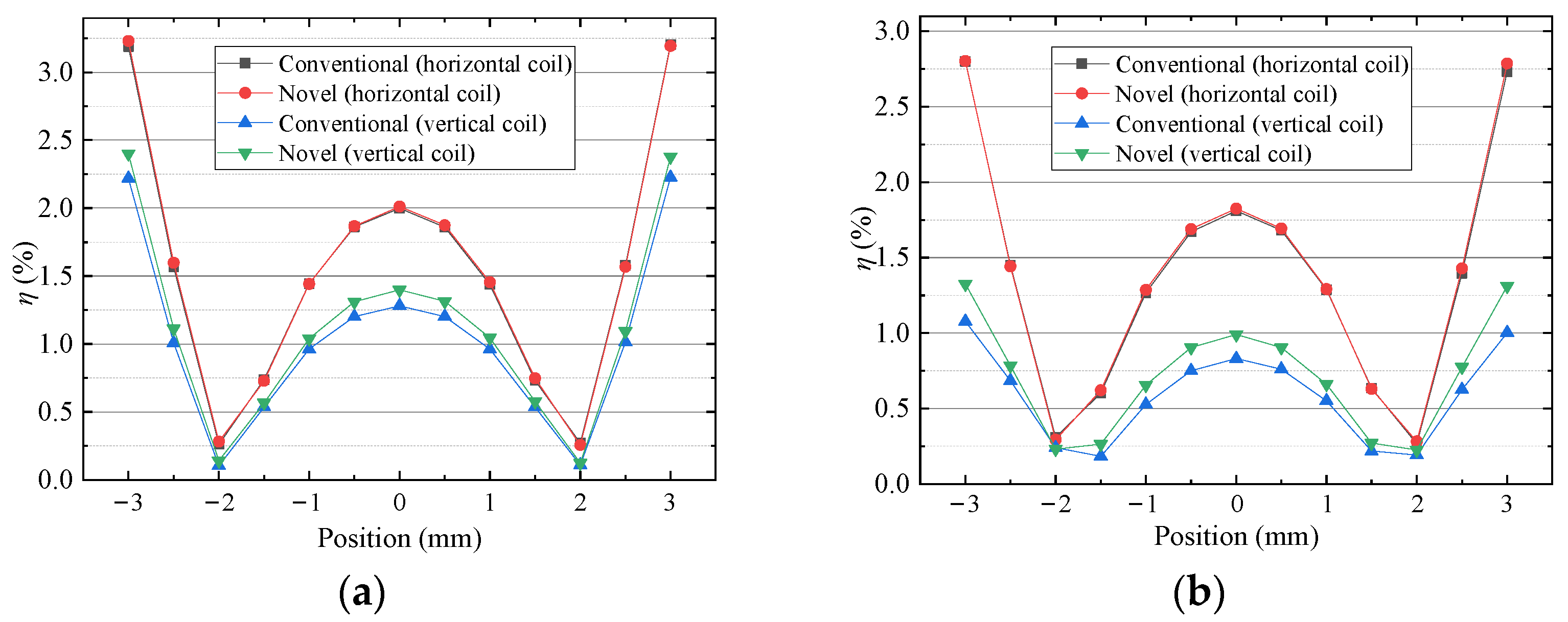
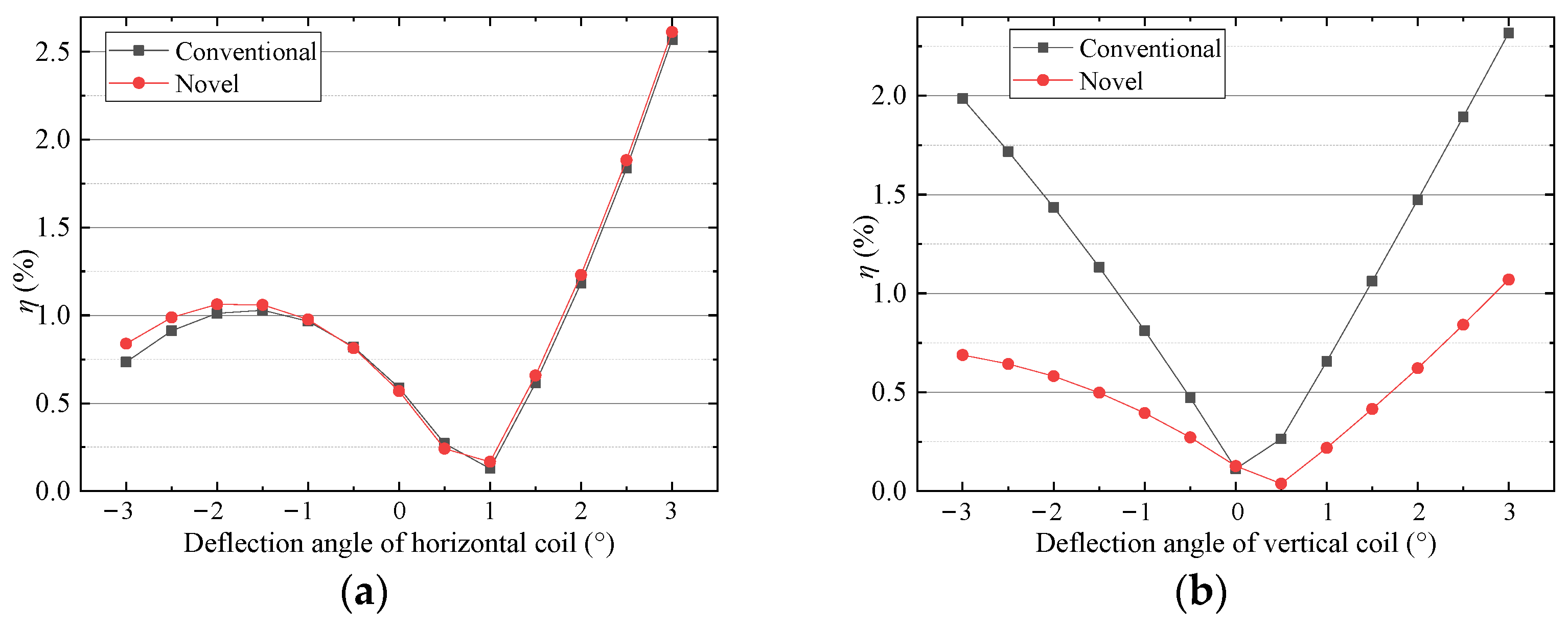
5.2. Electromagnetic Force
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gong, Z.; Ding, L.; Li, S.; Yue, H.; Gao, H.; Deng, Z. Payload-agnostic decoupling and hybrid vibration isolation control for a maglev platform with redundant actuation. Mech. Syst. Signal Process. 2021, 146, 106985. [Google Scholar] [CrossRef]
- Grodsinsky, C.M.; Whorton, M.S. Survey of active vibration isolation systems for microgravity applications. J. Spacecr. Rocket. 2000, 37, 586–596. [Google Scholar] [CrossRef] [Green Version]
- Stark, H.R.; Stavrinidis, C. ESA microgravity and microdynamics activities—An overview. Acta Astronaut. 1994, 34, 205–221. [Google Scholar] [CrossRef]
- Li, L.; Tan, L.; Kong, L.; Wang, D.; Yang, H. The influence of flywheel micro vibration on space camera and vibration suppression. Mech. Syst. Signal Process. 2018, 100, 360–370. [Google Scholar] [CrossRef]
- Wu, Q.; Cui, N.; Zhao, S.; Zhang, H.; Liu, B. Modeling and control of a six degrees of freedom maglev vibration isolation system. Sensors 2019, 19, 3608. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Jing, X.; Daley, S.; Li, F. Recent advances in micro-vibration isolation. Mech. Syst. Signal Processing 2015, 56, 55–80. [Google Scholar] [CrossRef]
- Wang, C.; Xie, X.; Chen, Y.; Zhang, Z. Investigation on active vibration isolation of a Stewart platform with piezoelectric actuators. J. Sound Vib. 2016, 383, 1–19. [Google Scholar] [CrossRef]
- Wang, X.; Wu, H.; Yang, B. Micro-vibration suppressing using electromagnetic absorber and magnetostrictive isolator combined platform. Mech. Syst. Signal Process. 2020, 139, 106606. [Google Scholar] [CrossRef]
- Hansen, C.H.; Snyder, S.D.; Qiu, X.; Brooks, L.A.; Moreau, D.J. Active Control of Noise and Vibration, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Stabile, A.; Aglietti, G.S.; Richardson, G.; Smet, G. Design and verification of a negative resistance electromagnetic shunt damper for spacecraft micro-vibration. J. Sound Vib. 2017, 386, 38–49. [Google Scholar] [CrossRef]
- Gu, J.; Kim, W.; Verma, S. Nanoscale motion control with a compact minimum-actuator magnetic levitator. J. Dyn. Syst. Meas. Control 2005, 127, 433–442. [Google Scholar] [CrossRef]
- Chen, M.; Huang, S.; Hung, S.; Fu, L. Design and implementation of a new six-DOF Maglev positioner with a fluid bearing. IEEE/ASME Trans. Mechatron. 2011, 16, 449–458. [Google Scholar] [CrossRef]
- Gong, Z.; Ding, L.; Yue, H.; Gao, H.; Liu, R.; Deng, Z.; Lu, Y. System integration and control design of a maglev platform for space vibration isolation. J. Vib. Control 2019, 25, 1720–1736. [Google Scholar] [CrossRef]
- Xu, F.; Lu, X.; Zheng, T.; Xu, X. Motion control of a magnetic levitation actuator based on a wrench model considering yaw angle. IEEE Trans. Ind. Electron. 2019, 67, 8545–8554. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, B.; Cui, N.; Zhao, S. Tracking control of a Maglev vibration isolation system based on a high-precision relative position and attitude model. Sensors 2019, 19, 3375. [Google Scholar] [CrossRef] [Green Version]
- Shin, B.H.; Oh, D.; Lee, S. A two-dimensional laser scanning mirror using motion-decoupling electromagnetic actuators. Sensors 2013, 13, 4146–4156. [Google Scholar] [CrossRef]
- He, D.; Shinshi, T.; Nakai, T. Development of a maglev lens driving actuator for off-axis control and adjustment of the focal point in laser beam machining. Precis. Eng. 2013, 37, 255–264. [Google Scholar] [CrossRef]
- Yang, F.; Zhao, Y.; Mu, X.; Zhang, W.; Jiang, L.; Yue, H.; Liu, R. A Novel 2-DOF Lorentz Force Actuator for the Modular Magnetic Suspension Platform. Sensors 2020, 20, 4365. [Google Scholar] [CrossRef]
- Edberg, D.; Boucher, R.; Schenck, D.; Nurre, G.; Whorton, M.; Kim, Y.; Alhorn, D. Results of the STABLE microgravity vibration isolation flight experiment. Gruidance Control Adv. Astronaut. Sci. 1996, 92, AAS 96-071. [Google Scholar]
- Whorton, M. Survey of microgravity vibration isolation systems. In Microgravity Environment Interpretation Tutorial (MEIT); Glenn Research Center: Cleveland, OH, USA, 2004. [Google Scholar]
- Whorton, M.S. Microgravity Vibration Isolation for the International Space Station; AIP Conference Proceedings; American Institute of Physics: New York, NY, USA, 2000; pp. 605–610. [Google Scholar]
- Whorton, M. g-LIMIT-A vibration isolation system for the microgravity science glovebox. In Proceedings of the 37th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 11–14 January 1999; p. 577. [Google Scholar]
- Li, Z.; Wu, Q.; Liu, B.; Gong, Z. Optimal Design of Magneto-Force-Thermal Parameters for Electromagnetic Actuators with Halbach Array. Actuators 2021, 10, 231. [Google Scholar] [CrossRef]
- Wei, W.; Li, Q.; Xu, F.; Zhang, X.; Jin, J.; Jin, J.; Sun, F. Research on an Electromagnetic Actuator for Vibration Suppression and Energy Regeneration. Actuators 2020, 9, 42. [Google Scholar] [CrossRef]
- Verma, S.; Shakir, H.; Kim, W. Novel electromagnetic actuation scheme for multiaxis nanopositioning. IEEE Trans. Magn. 2006, 42, 2052–2062. [Google Scholar] [CrossRef]
- Estevez, P.; Mulder, A.; Schmidt, R.M. 6-DoF miniature maglev positioning stage for application in haptic micro-manipulation. Mechatronics 2012, 22, 1015–1022. [Google Scholar] [CrossRef]
- Kim, M.; Jeong, J.; Kim, H.; Gweon, D. A six-degree-of-freedom magnetic levitation fine stage for a high-precision and high-acceleration dual-servo stage. Smart Mater. Struct. 2015, 24, 105022. [Google Scholar] [CrossRef]
- Choi, Y.; Gweon, D. A high-precision dual-servo stage using halbach linear active magnetic bearings. IEEE/ASME Trans. Mechatron. 2010, 16, 925–931. [Google Scholar] [CrossRef]
- Chen, J.; Lee, S.; DeBra, D.B. Gyroscope free strapdown inertial measurement unit by six linear accelerometers. J. Guid. Control. Dyn. 1994, 17, 286–290. [Google Scholar] [CrossRef]
- Schopp, P.; Klingbeil, L.; Peters, C.; Manoli, Y. Design, geometry evaluation, and calibration of a gyroscope-free inertial measurement unit. Sens. Actuators A Phys. 2010, 162, 379–387. [Google Scholar] [CrossRef]
- Li, Z.; Ren, W.; Wang, A. Study on acceleration measurement in space high quality microgravity active vibration isolation system. J. Vib. Shock. 2010, 29, 211–215. [Google Scholar]
- Wu, Q.; Yue, H.; Liu, R.; Zhang, X.; Ding, L.; Liang, T.; Deng, Z. Measurement model and precision analysis of accelerometers for maglev vibration isolation platforms. Sensors 2015, 15, 20053–20068. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Movement of the Platform | Driving Force |
|---|---|
| Translation in x-axis direction | Horizontal driving forces from actuators 2 and 4 |
| Translation in y-axis direction | Horizontal driving forces from actuators 1 and 3 |
| Translation in z-axis direction | Vertical driving forces from actuators 1–4 |
| Deflection around x-axis | Vertical driving forces from actuators 2 and 4 |
| Deflection around y-axis | Vertical driving forces from actuators 1 and 3 |
| Rotate around z-axis | Horizontal driving forces from actuators 1–4 |
| Parameters | In This Paper | In the Reference |
|---|---|---|
| Wire diameter | 0.4 mm | 1 mm |
| Vertical coils | 2 × 300 turns | 2 × 182 turns |
| Horizontal coils | 3 × 300 turns | 108 turns |
| Volume | 687.5 cm3 | 1463 cm3 |
| Maximum continuous current | 2.5 A | 2 A |
| Average Magnetic flux density | 0.423 T | 0.33 T |
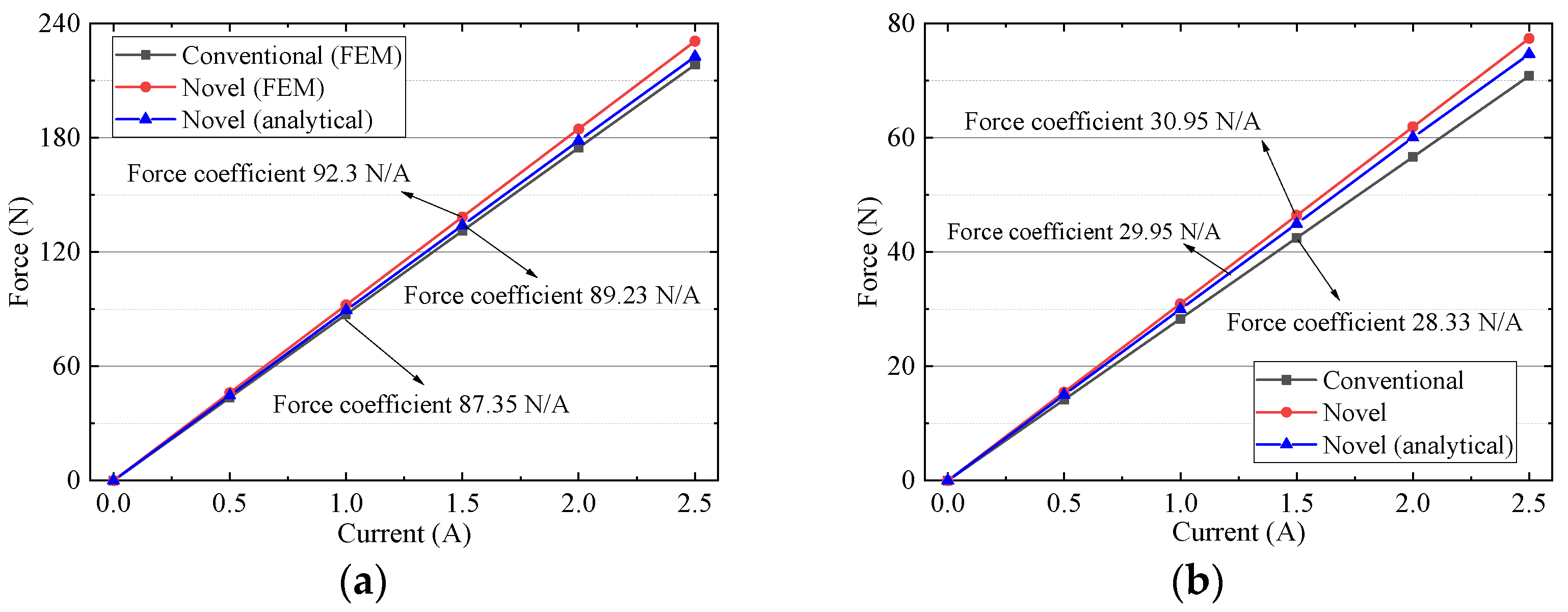
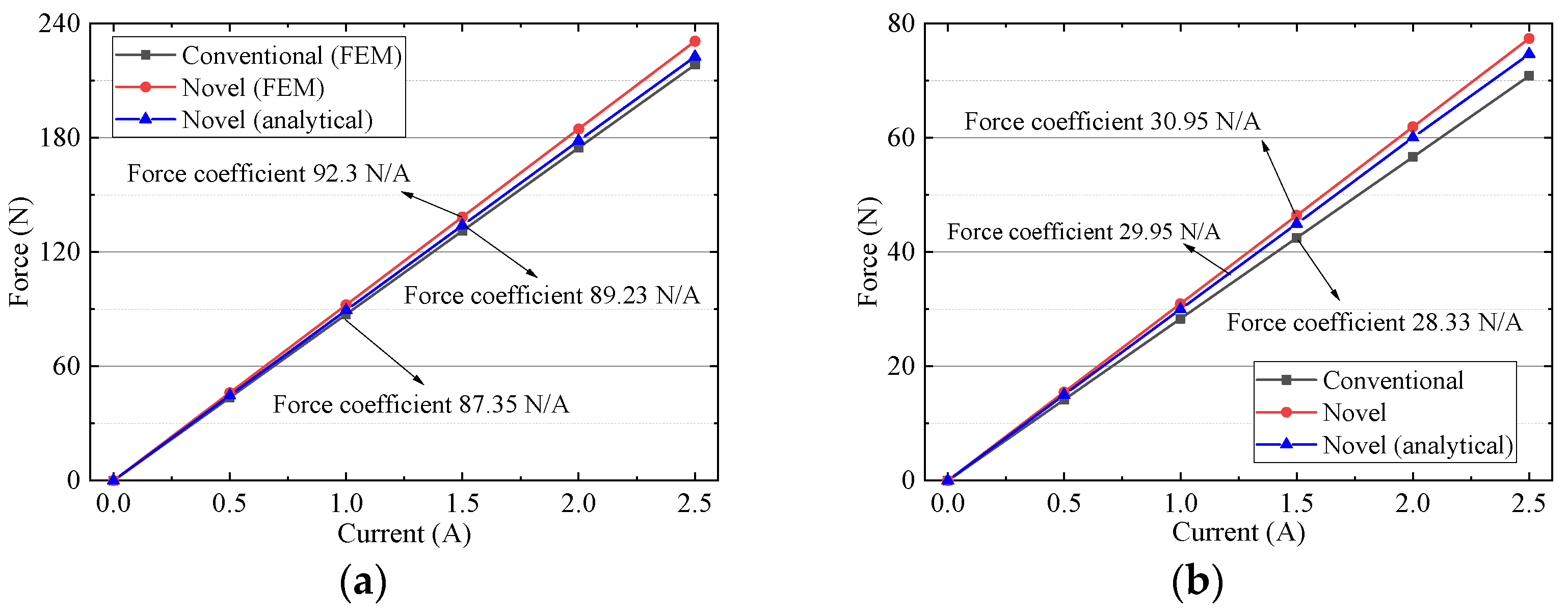
| Vertical force coefficient | 30.95 N/A | 5.549 N/A |
| Horizontal force coefficient | 92.3 N/A | 4.027 N/A |
| Working range | 3 × 3 × 3 mm | 5 × 5 × 5 mm |
| Rotation | 3° × 3° × 5° | 10° × 10° × 10° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Zhao, Y.; Li, H.; Mu, X.; Zhang, W.; Yue, H.; Liu, R. Design and Analysis of a 2-DOF Electromagnetic Actuator with an Improved Halbach Array for the Magnetic Suspension Platform. Sensors 2022, 22, 790. https://doi.org/10.3390/s22030790
Yang F, Zhao Y, Li H, Mu X, Zhang W, Yue H, Liu R. Design and Analysis of a 2-DOF Electromagnetic Actuator with an Improved Halbach Array for the Magnetic Suspension Platform. Sensors. 2022; 22(3):790. https://doi.org/10.3390/s22030790
Chicago/Turabian StyleYang, Fei, Yong Zhao, Huaiyu Li, Xingke Mu, Wenqiao Zhang, Honghao Yue, and Rongqiang Liu. 2022. "Design and Analysis of a 2-DOF Electromagnetic Actuator with an Improved Halbach Array for the Magnetic Suspension Platform" Sensors 22, no. 3: 790. https://doi.org/10.3390/s22030790
APA StyleYang, F., Zhao, Y., Li, H., Mu, X., Zhang, W., Yue, H., & Liu, R. (2022). Design and Analysis of a 2-DOF Electromagnetic Actuator with an Improved Halbach Array for the Magnetic Suspension Platform. Sensors, 22(3), 790. https://doi.org/10.3390/s22030790