
Smartphone GNSS Performance in an Urban Scenario with RAIM Application


Abstract
1. Introduction
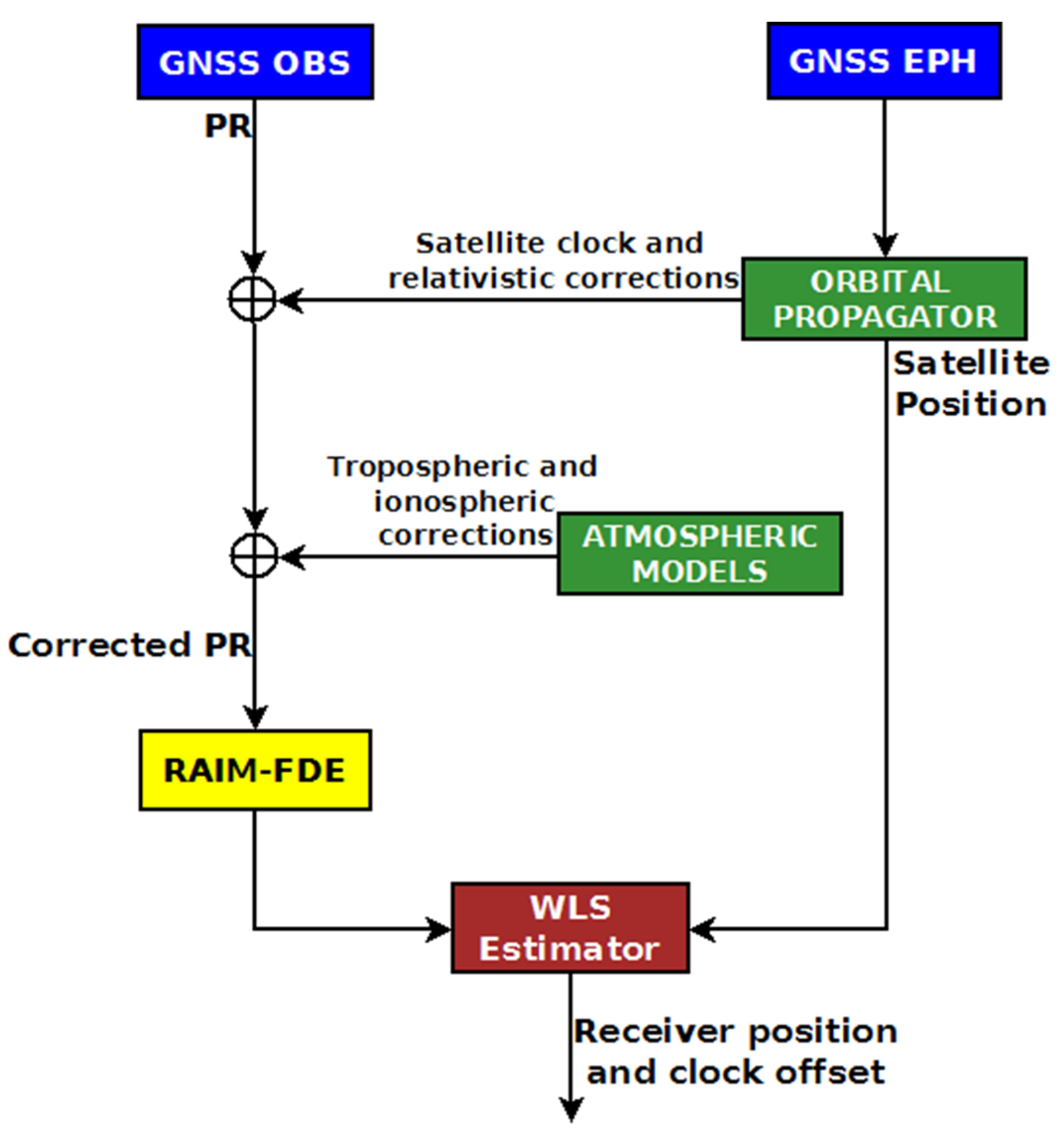
2. Absolute Positioning with Pseudorange Measurements
3. RAIM
- detecting the presence of anomalous measurements, eventually rejecting them for solution estimation, and
- computing the protection levels, a statistics bound to position error.
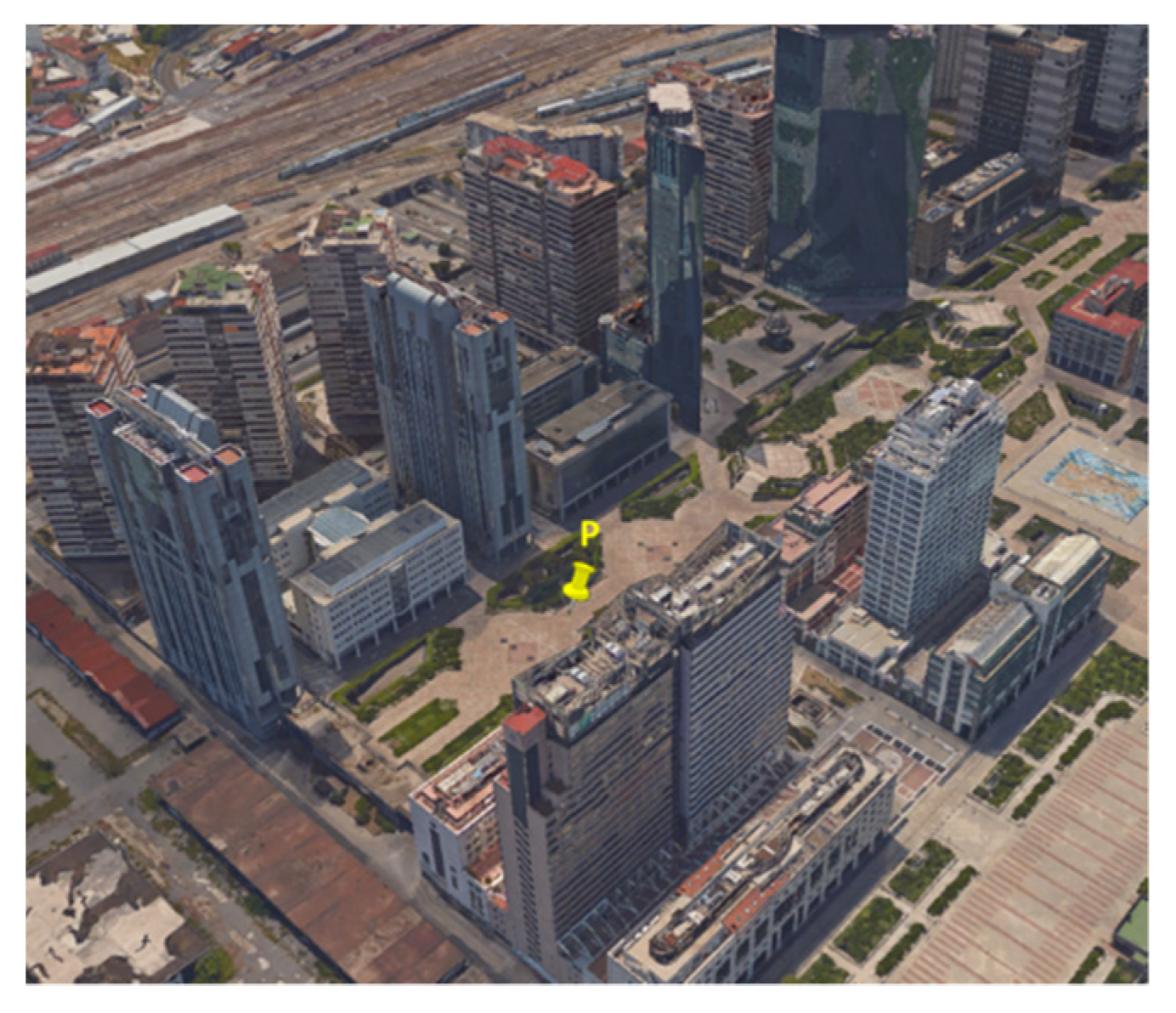
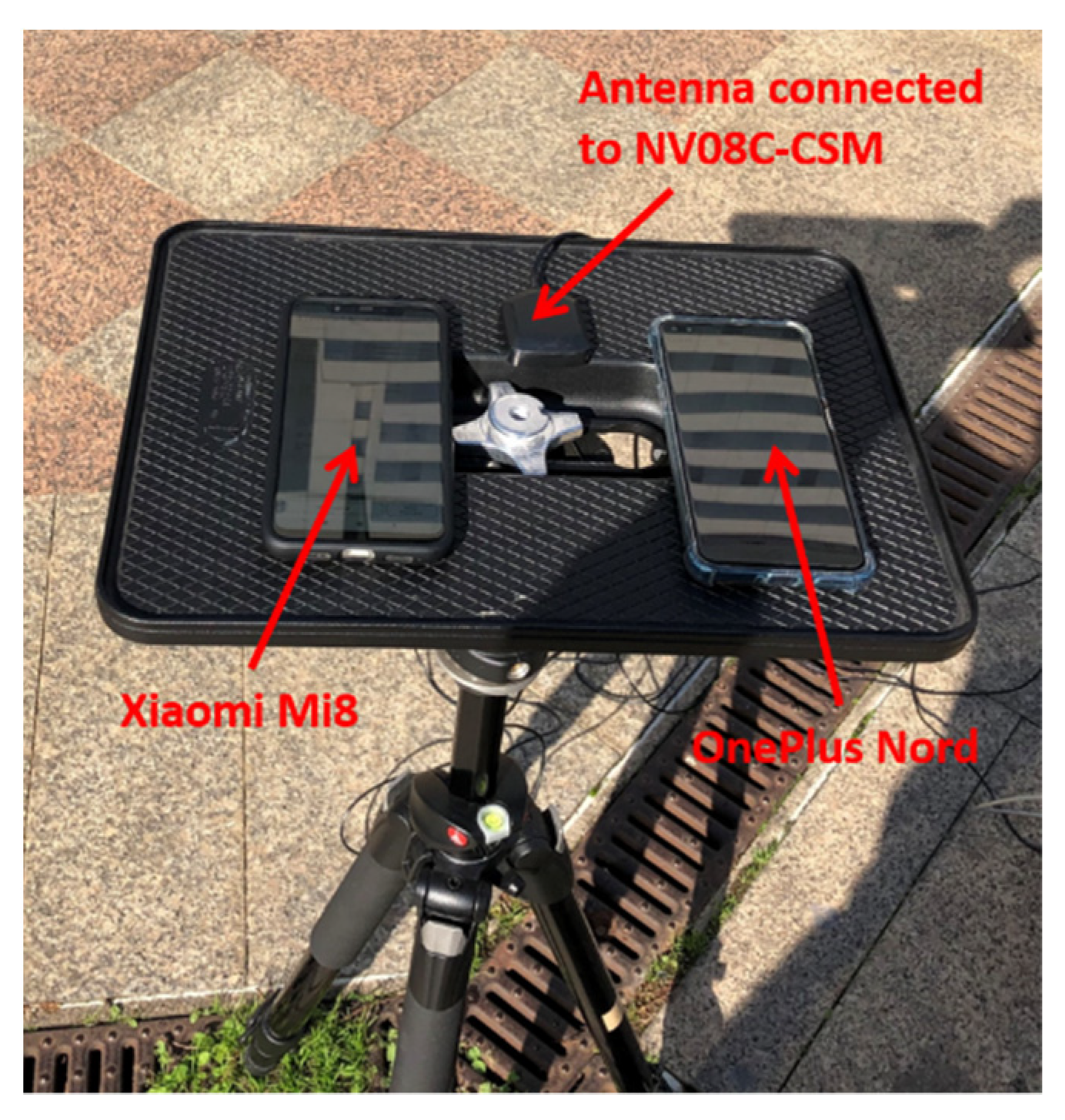
4. Test
5. Results and Discussion
- Analysis of the satellite visibility and geometry,
- Analysis of the C/N0 values for the received signals,
- Analysis of the position performance, without applying RAIM functionality,
- Analysis of the position performance, applying RAIM functionality.
5.1. Analysis of the Satellite Visibility and Geometry
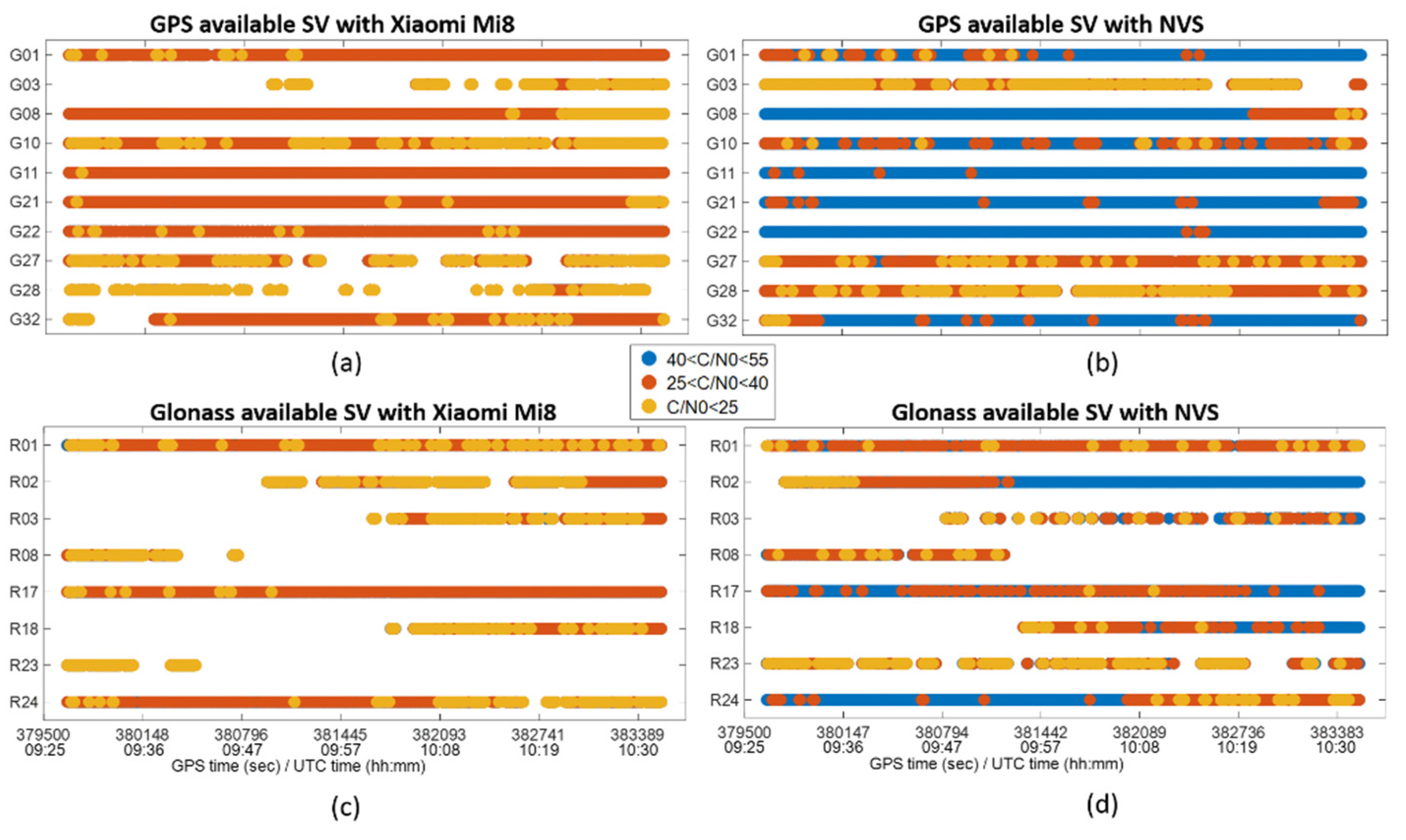
5.2. Analysis of the C/N0 Values for the Received Signals
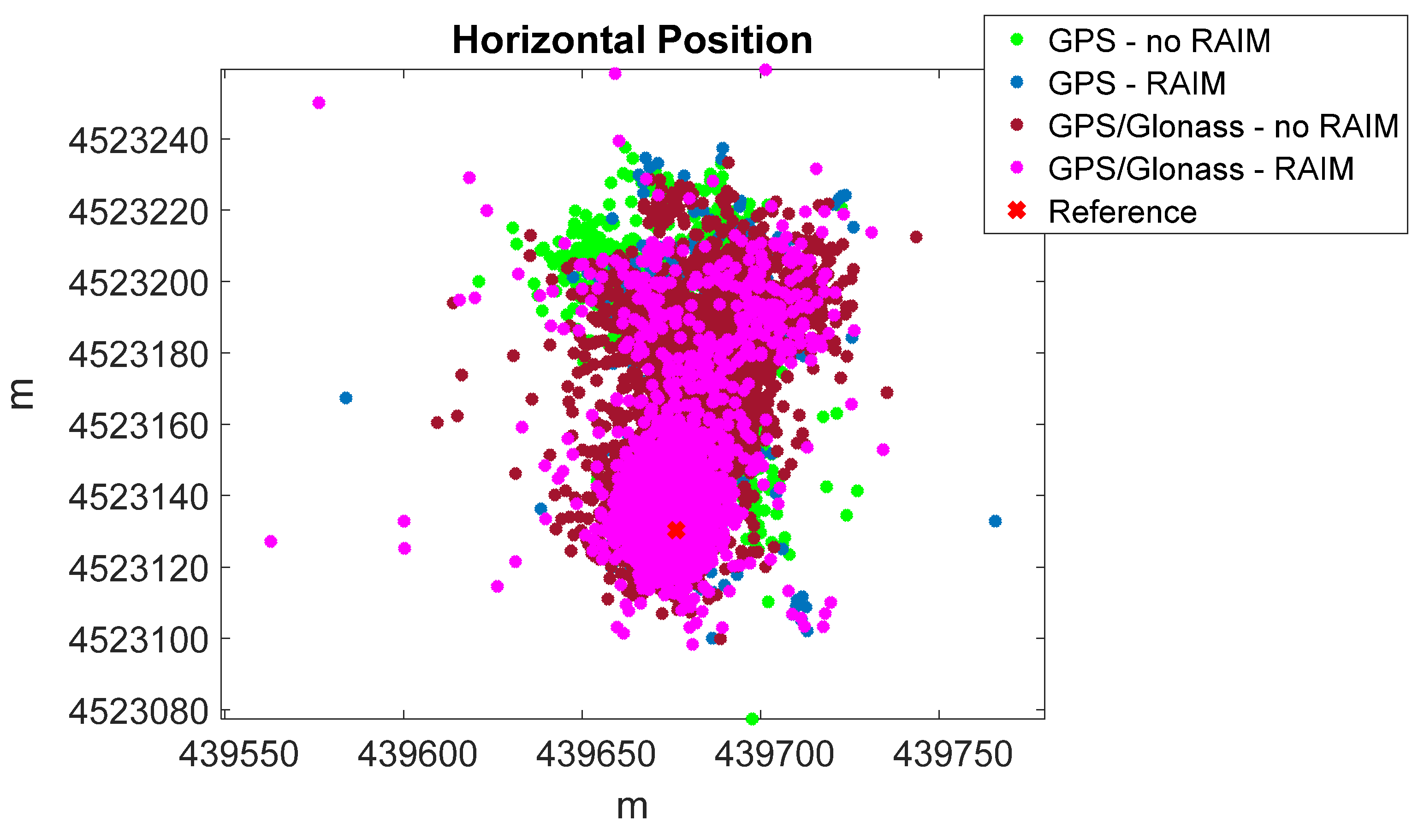
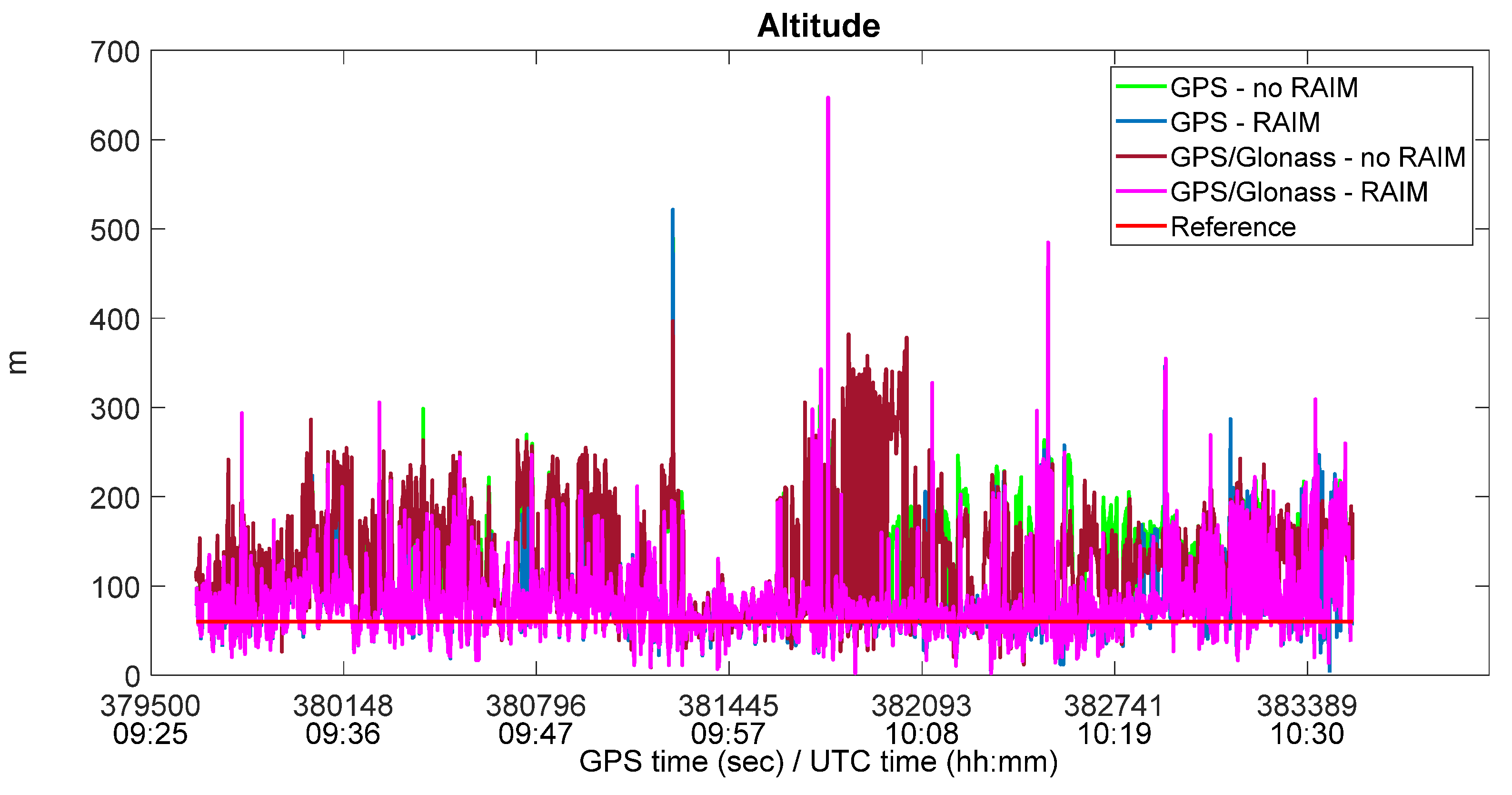
5.3. Analysis of Position Performance, without Applying RAIM Functionality
5.4. Analysis of Position Performance, Applying RAIM Functionality
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- European GNSS Agency. GNSS Market Report; Publications Office: Luxembourg, 2019. [Google Scholar] [CrossRef]
- GSA. White Paper on Using GNSS Raw Measurements on Android Devices; European GNSS Agency: Prague, Czech Republic, 2017. [Google Scholar] [CrossRef]
- Pesyna, K.M., Jr.; Heath, R.W., Jr.; Humphreys, T.E. Centimeter Positioning with a Smartphone-Quality GNSS Antenna. In Proceedings of the 2014 ION GNSS Conference, Tampa, FL, USA, 9–12 September 2014. [Google Scholar]
- Kirkko-Jaakkola, M.; Söderholm, S.; Honkala, S.; Koivula, H.; Nyberg, S.; Kuusniemi, H. Low-Cost Precise Positioning Using a National GNSS Network. In Proceedings of the ION GNSS+ 2015, 28th International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 14–18 September 2015; pp. 2570–2577. [Google Scholar]
- Humphreys, T.E.; Murrian, M.; van Diggelen, F.; Podshivalov, S.; Pesyna, K.M. On the feasibility of cm-accurate positioning via a smartphone’s antenna and GNSS chip. In Proceedings of the IEEE/ION PLANS, Institute of Navigation, Savannah, GA, USA, 11–14 April 2016; pp. 232–242. [Google Scholar]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Whang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Siddakatte, R.; Broumandan, A.; Lachapelle, G. Performance evaluation of smartphone GNSS measurements with different antenna configurations. In Proceedings of the International Navigation Conference 2018, Brighton, UK, 27–30 November 2017. [Google Scholar]
- Warnant, R.; Van De Vyvere, L.; Warnant, Q. Positioning with Single and Dual Frequency Smartphones Running Android 7 or Later. In Proceedings of the 31st International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 284–303. [Google Scholar]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of Dual Frequency GNSS Observations from a Xiaomi Mi 8 Android Smartphone and Positioning Performance Analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef] [PubMed]
- Fortunato, M.; Critchley-Marrows, J.; Siutkowska, M.; Ivanovici, M.L.; Benedetti, E.; Roberts, W. Enabling High Accuracy Dynamic Applications in Urban Environments Using PPP and RTK on Android Multi-Frequency and Multi-GNSS Smartphones. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Dabove, P.; Di Pietra, V. Towards high accuracy GNSS real-time positioning with smartphones. Adv. Space Res. 2018, 63, 94–102. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, M.; Zhou, C.; Zhang, P. Precise Point Positioning Using Dual-Frequency GNSS Observations on Smartphone. Sensors 2019, 19, 2189. [Google Scholar] [CrossRef] [PubMed]
- Aggrey, J.; Bisnath, S.; Naciri, N.; Shinghal, G.; Yang, S. Multi-GNSS precise point positioning with next-generation smartphone measurements. J. Spat. Sci. 2020, 65, 79–98. [Google Scholar] [CrossRef]
- Angrisano, A.; Gioia, C.; Gaglione, S.; Del Core, G. GNSS reliability testing in signal-degraded scenario. Int. J. Navig. Obs. 2013. [Google Scholar] [CrossRef]
- Sturza, M. Navigation system integrity monitoring using redundant measurements. Navigation 1988, 35, 483–501. [Google Scholar] [CrossRef]
- Brown, R. Receiver Autonomous Integrity Monitoring. In Global Positioning System: Theory and Applications; Parkinson, B.W., Spilker, J.J., Jr., Eds.; AIAA: Reston, VI, USA, 1992; Volume II, pp. 143–165. [Google Scholar]
- Walter, T.; Enge, P. Weighted RAIM for precision approach. In Proceedings of ION GPS 1995; ION GPS: Palm Springs, CA, USA, 1995; pp. 1995–2004. [Google Scholar]
- Kuusniemi, H.; Lachapelle, G.; Takala, J. Position and velocity reliability testing in degraded GPS signal environments. GPS Solut. 2004, 8, 226–237. [Google Scholar] [CrossRef]
- Kuusniemi, H.; Wieser, A.; Lachapelle, G.; Takala, J. User-level reliability monitoring in urban personal satellite-navigation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1305–1318. [Google Scholar] [CrossRef]
- Gaglione, S.; Innac, A.; Pastore Carbone, S.; Troisi, S.; Angrisano, A. Robust estimation methods applied to GPS in harsh environments. In Proceedings of the 2017 European Navigation Conference, Lausanne, Switzerland, 9–12 May 2017; pp. 14–25. [Google Scholar] [CrossRef]
- Brown, R.G.; Chin, G.Y. GPS RAIM Calculation of Threshold and Protection Radius Using Chi-Square Methods—A Geometric Approach; Global Positioning System; The Institute of Navigation: Manassas, VA, USA, 1997; pp. 155–179. [Google Scholar]
- Angrisano, A.; Gaglione, S.; Crocetto, N.; Vultaggio, M. PANG-NAV: A tool for processing GNSS measurements in SPP, including RAIM functionality. GPS Solut. 2019, 24, 19. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | GNSS | Number of Available Satellites | ||
|---|---|---|---|---|
| Minimum | Average | Maximum | ||
| Xiaomi Mi8 | GPS | 2 | 6.6 | 10 |
| Glonass | 0 | 3.6 | 6 | |
| GPS/Glonass | 3 | 10.2 | 15 | |
| NVS | GPS | 6 | 9.0 | 10 |
| Glonass | 3 | 5.3 | 7 | |
| GPS/Glonass | 9 | 14.2 | 17 | |
| Device | GNSS | PDOP | ||
|---|---|---|---|---|
| Minimum | Average | Maximum | ||
| Xiaomi Mi8 | GPS | 1.5 | 3.6 | 16.6 |
| Glonass | 2.2 | 7.7 | 25.2 | |
| GPS/Glonass | 1.3 | 2.6 | 10.9 | |
| NVS | GPS | 1.5 | 2.0 | 5.6 |
| Glonass | 1.7 | 4.8 | 25.3 | |
| GPS/Glonass | 1.1 | 1.5 | 2.9 | |
| Device | GNSS | PDOP | ||
|---|---|---|---|---|
| Minimum | Average | Maximum | ||
| Xiaomi Mi8 | GPS | 11.0 | 33.2 | 43.0 |
| Glonass | 10.0 | 30.7 | 43.0 | |
| NVS | GPS | 13.0 | 42.7 | 55.0 |
| Glonass | 12.0 | 39.6 | 53.0 | |
| Device | GNSS | RMS Error (m) | Maximum Error (m) | Solution Availability (%) | ||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | |||
| Xiaomi Mi8 | GPS | 39.4 | 80.1 | 114.6 | 461.5 | 99.7 |
| Glonass | 104.4 | 198.7 | 819.8 | 859.7 | 43.7 | |
| GPS/Glonass | 42.1 | 94.7 | 106.2 | 336.7 | 99.9 | |
| NVS | GPS | 45.4 | 101.3 | 111.3 | 256.0 | 100.0 |
| Glonass | 53.5 | 160.0 | 562.3 | 552.5 | 94.4 | |
| GPS/Glonass | 40.8 | 111.4 | 97.4 | 261.4 | 100.0 | |
| Device | GNSS | RMS Error (m) | Maximum Error (m) | Solution Availability (%) | ||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | |||
| Xiaomi Mi8 | GPS | 25.5 | 50.7 | 156.1 | 461.5 | 99.7 |
| Glonass | 104.4 | 198.7 | 819.9 | 859.7 | 43.7 | |
| GPS/Glonass | 22.9 | 45.6 | 156.1 | 587.1 | 99.9 | |
| NVS | GPS | 21.1 | 53.5 | 160.4 | 455.0 | 100.0 |
| Glonass | 48.0 | 144.3 | 562.3 | 552.5 | 94.4 | |
| GPS/Glonass | 16.1 | 38.3 | 146.5 | 434.4 | 100.0 | |
| Device | GNSS | RMS Error (m) | Maximum Error (m) | Reliable Availability (%) | ||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | |||
| Xiaomi Mi8 | GPS | 14.9 | 29.1 | 129.1 | 424.9 | 74.2 |
| Glonass | 63.8 | 117.7 | 195.1 | 565.8 | 3.2 | |
| GPS/Glonass | 17.7 | 36.1 | 131.5 | 587.1 | 85.8 | |
| NVS | GPS | 10.2 | 26.8 | 160.4 | 455.0 | 79.4 |
| Glonass | 34.7 | 102.1 | 222.7 | 500.3 | 38.3 | |
| GPS/Glonass | 11.1 | 24.0 | 146.5 | 434.4 | 90.8 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angrisano, A.; Gaglione, S. Smartphone GNSS Performance in an Urban Scenario with RAIM Application. Sensors 2022, 22, 786. https://doi.org/10.3390/s22030786
Angrisano A, Gaglione S. Smartphone GNSS Performance in an Urban Scenario with RAIM Application. Sensors. 2022; 22(3):786. https://doi.org/10.3390/s22030786
Chicago/Turabian StyleAngrisano, Antonio, and Salvatore Gaglione. 2022. "Smartphone GNSS Performance in an Urban Scenario with RAIM Application" Sensors 22, no. 3: 786. https://doi.org/10.3390/s22030786
APA StyleAngrisano, A., & Gaglione, S. (2022). Smartphone GNSS Performance in an Urban Scenario with RAIM Application. Sensors, 22(3), 786. https://doi.org/10.3390/s22030786