
Bridge Digital Twinning Using an Output-Only Bayesian Model Updating Method and Recorded Seismic Measurements



Abstract
:1. Introduction
- (i)
- Nonlinearity in bridge response behavior: Several approaches for linear FE model updating using modal properties, identified from ambient and/or operational data, exist in the literature (e.g., [6,7,8,9,10]). Nevertheless, these methods can update the bridge model only in the linear regime of response. Linear FE model updating methods provide limited insight into the nonlinear response behavior of the structure, which can occur during strong earthquake events.
- (ii)
- Measurement sparsity: Through the California Strong Motion Instrumentation Program (CSMIP) [11], the California Department of Conservation in collaboration with the California Department of Transportation (Caltrans) has instrumented several bridges and recorded their seismic responses during the past three decades. This valuable dataset has benefited the research community [12,13,14] and can provide the baseline for developing a DT platform for instrumented bridges across California. However, the collected data is often subjected to notable instrumentation sparsity. The sparsity in data poses important challenges to the uniqueness of the solution for the model updating technique and the accuracy of the resulting DT.
- (iii)
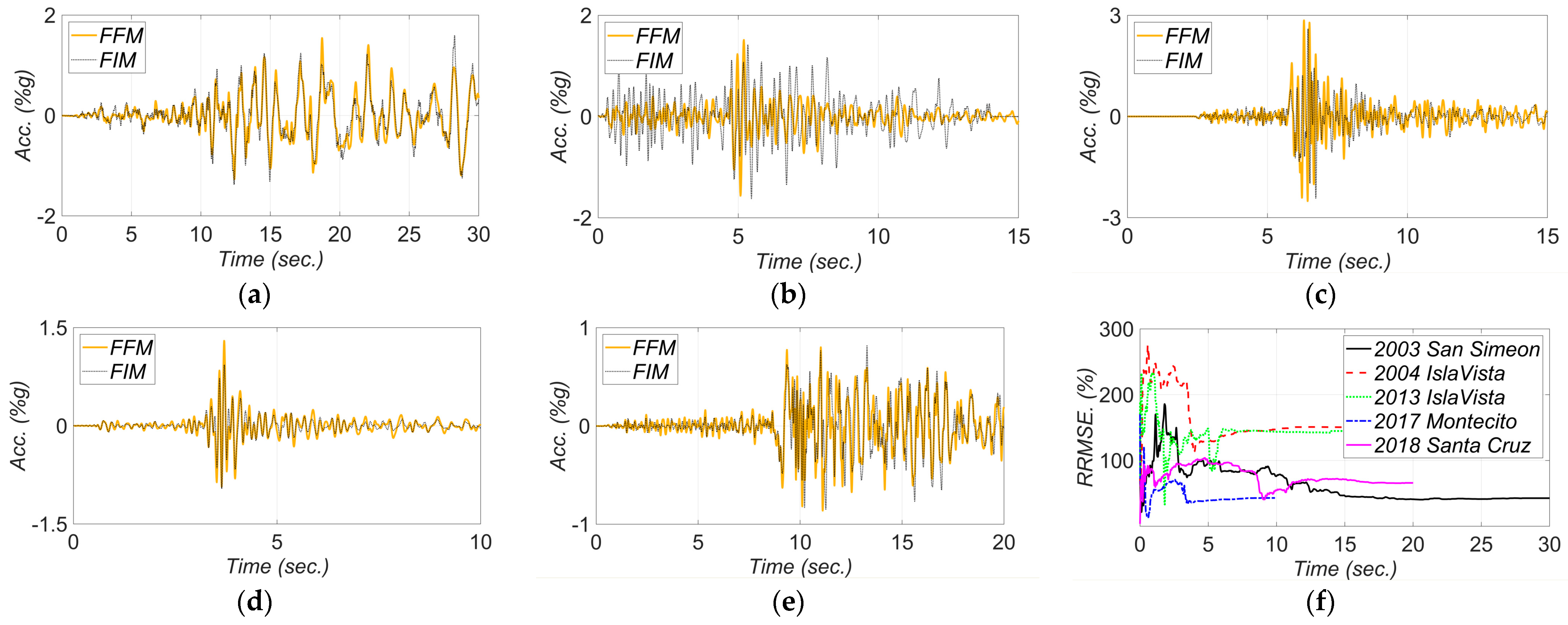
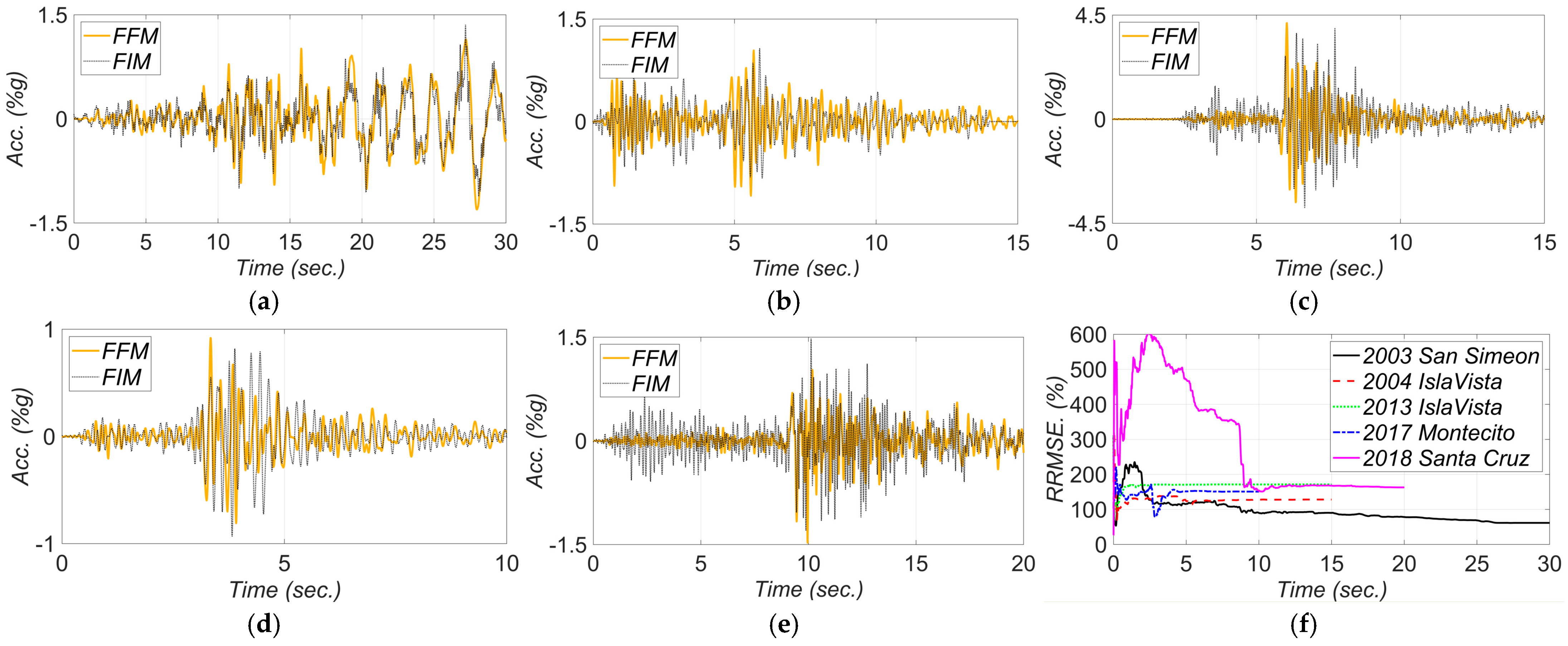
- Soil-Structure Interaction (SSI): The Foundation Input Motions (FIMs), which are the theoretical inputs to the soil-structure interactive system, are not explicitly measurable. FIMs can be different from the Free-Filed Motions (FFMs) due to the SSI effects [15]. The available knowledge on SSI effects is limited to analytical and numerical studies, and the in-situ and real-world effects of SSI on complex structures are not completely known [16,17,18,19,20]. Hence, developing DT for bridges using seismic measurements may require the estimation of the FIMs.
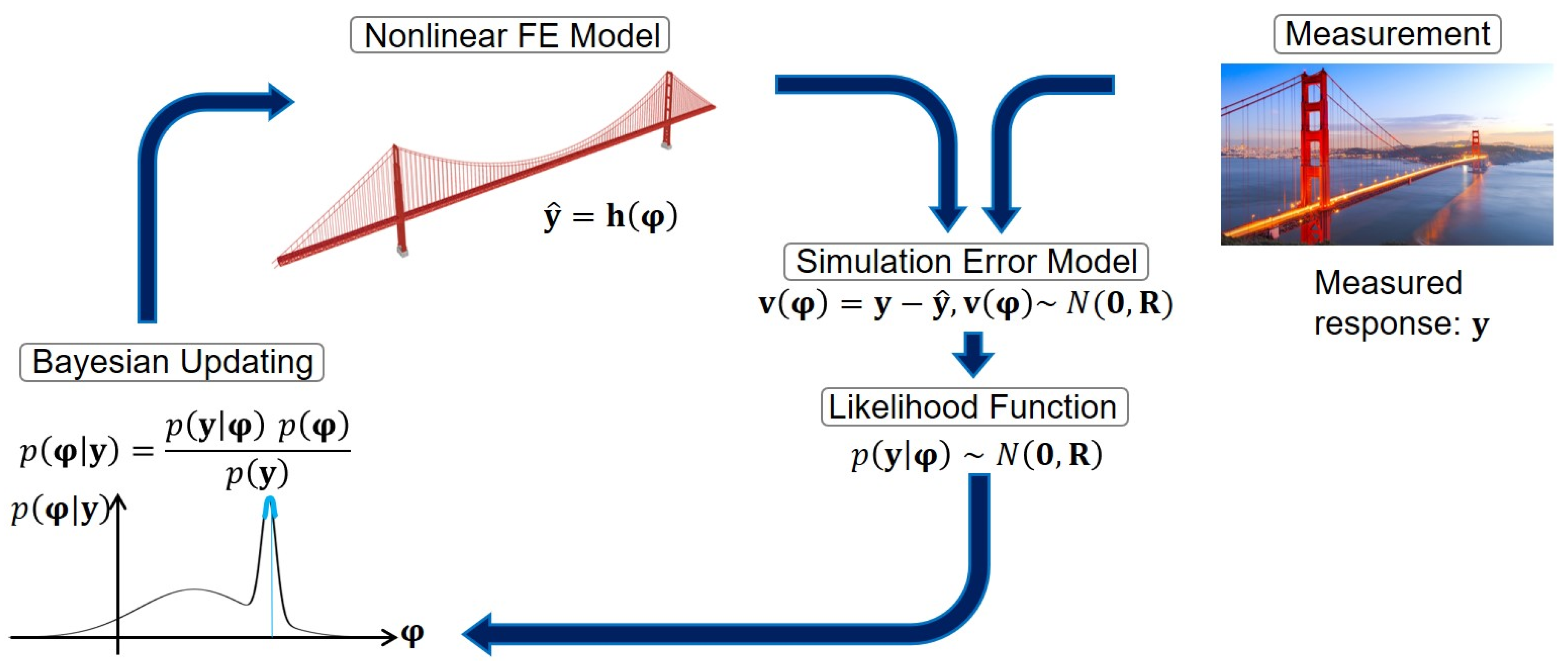
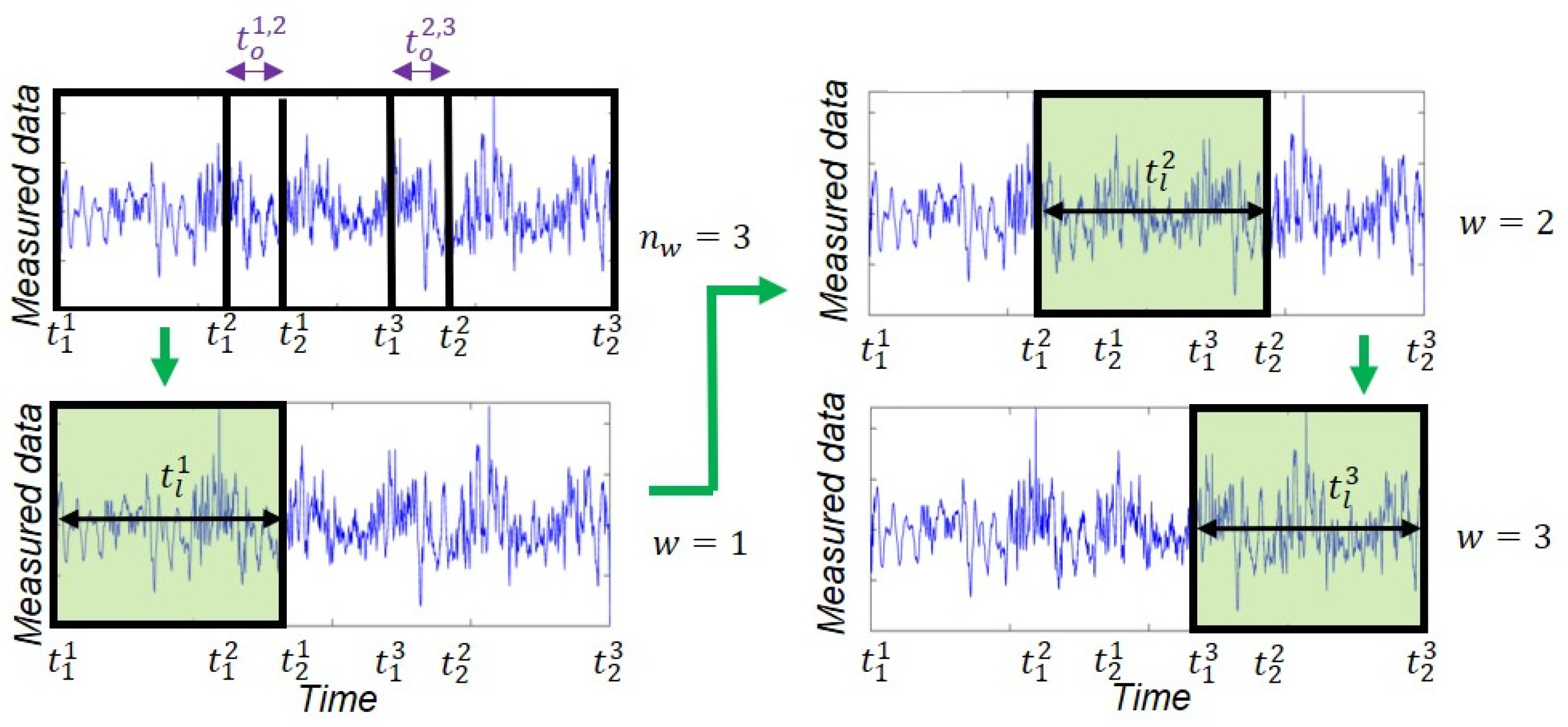
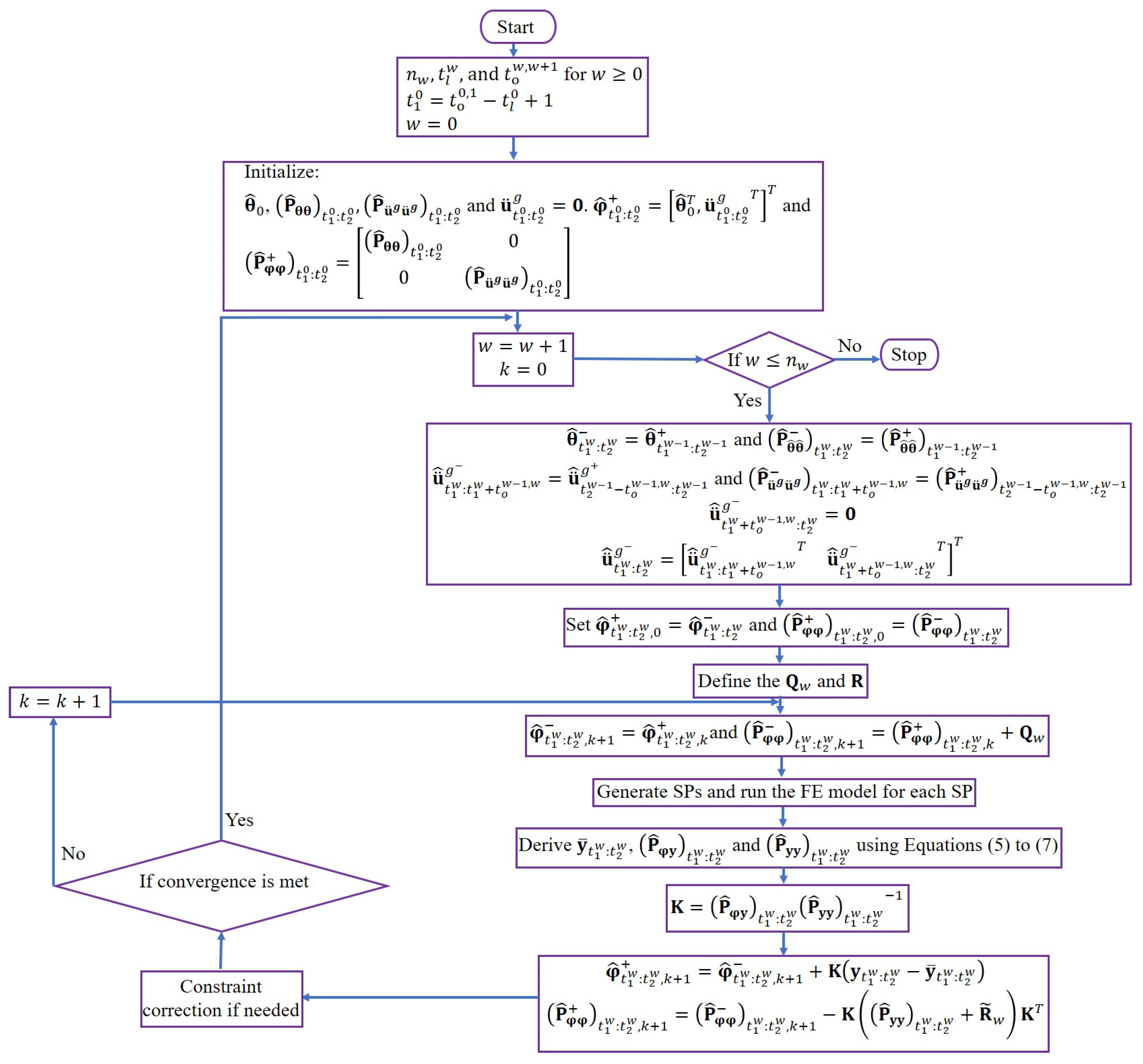
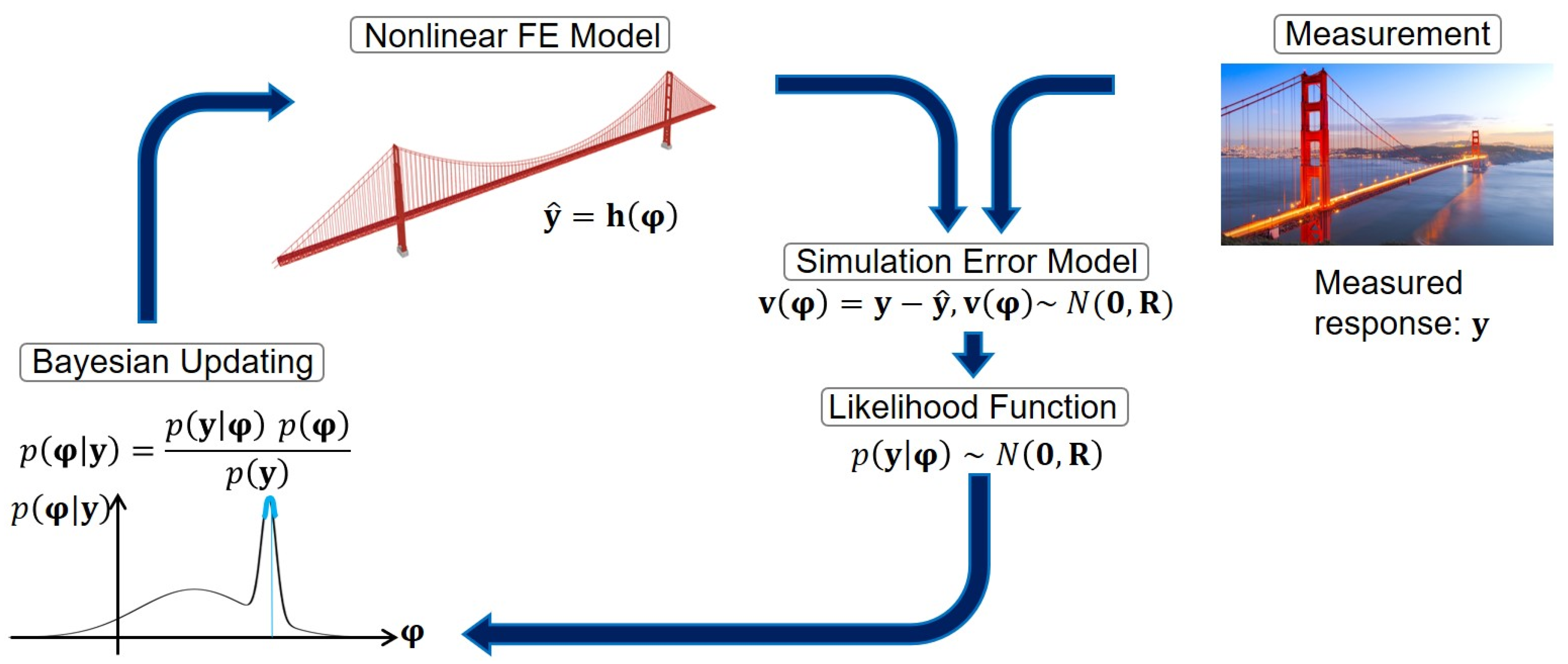
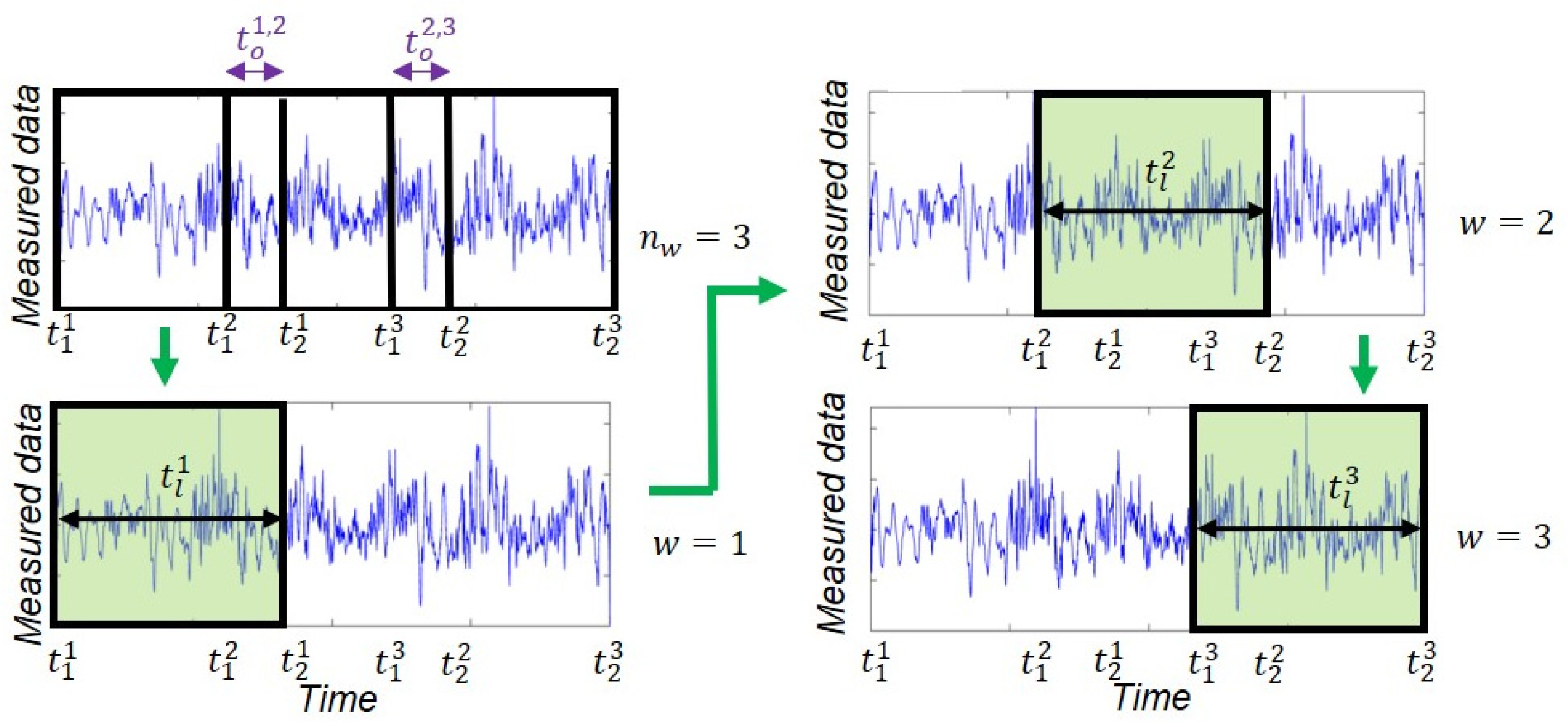
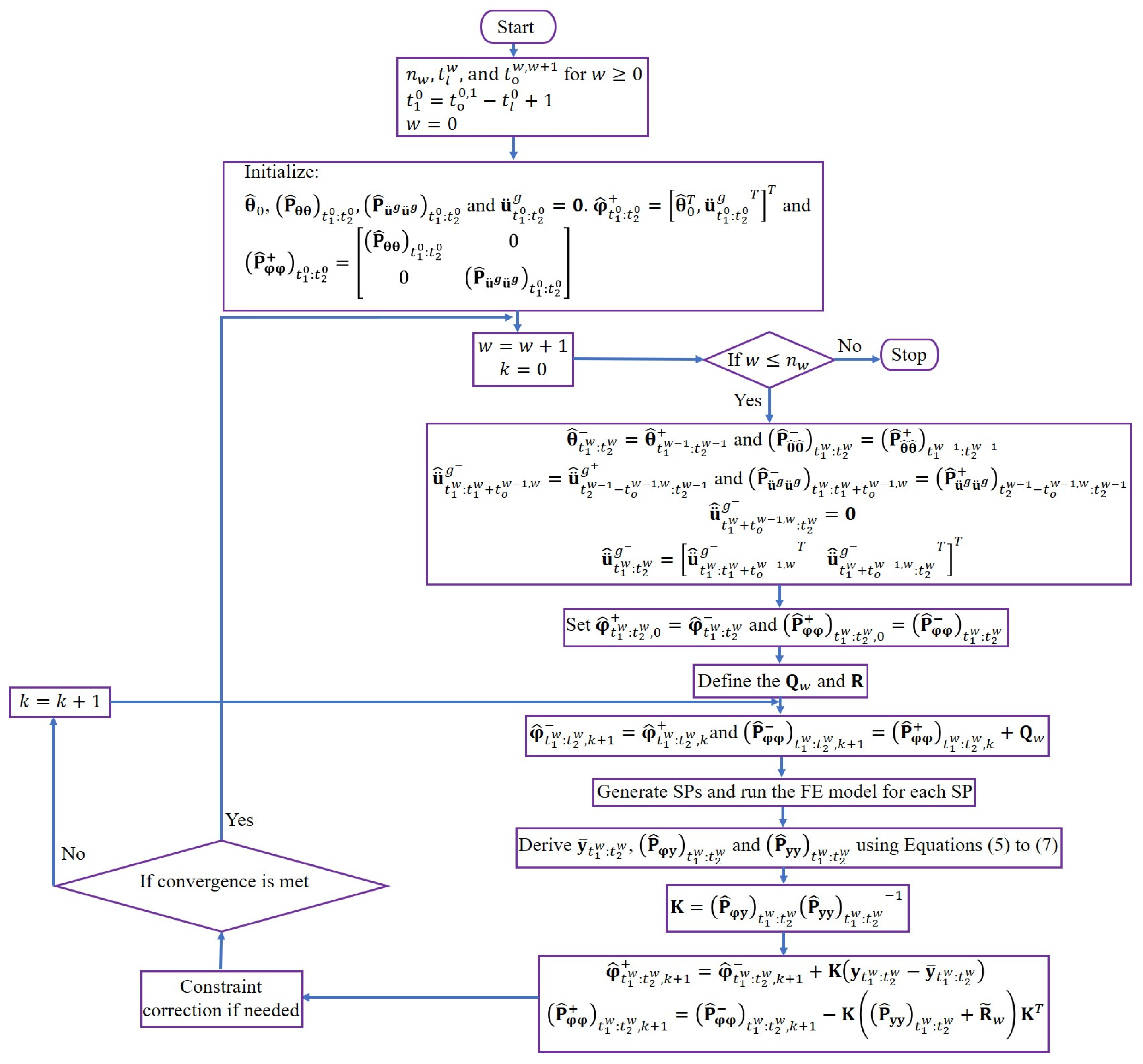
2. Sequential Bayesian Inference Method and Identifiability Analysis
2.1. Sequential Bayesian Inference Method for Output-Only FE Model Updating
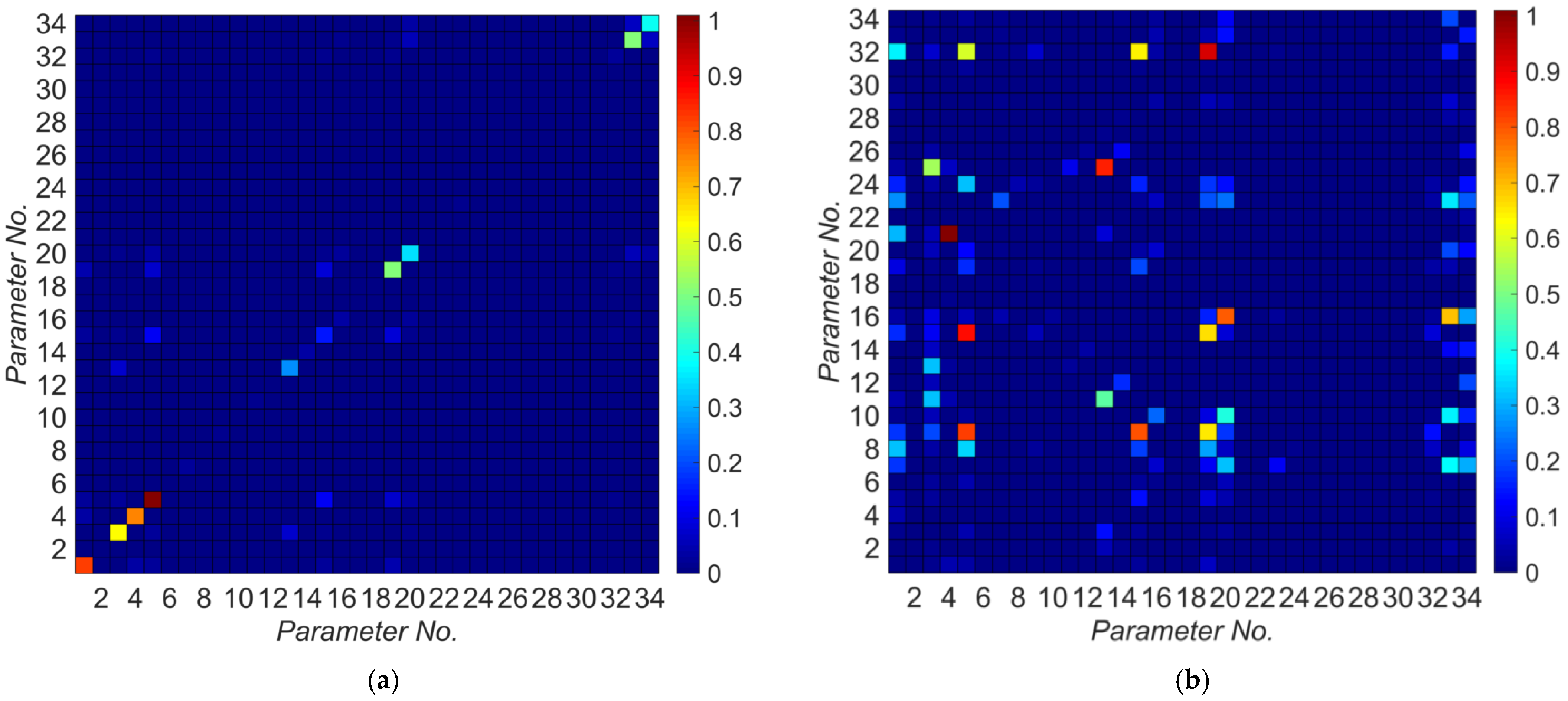
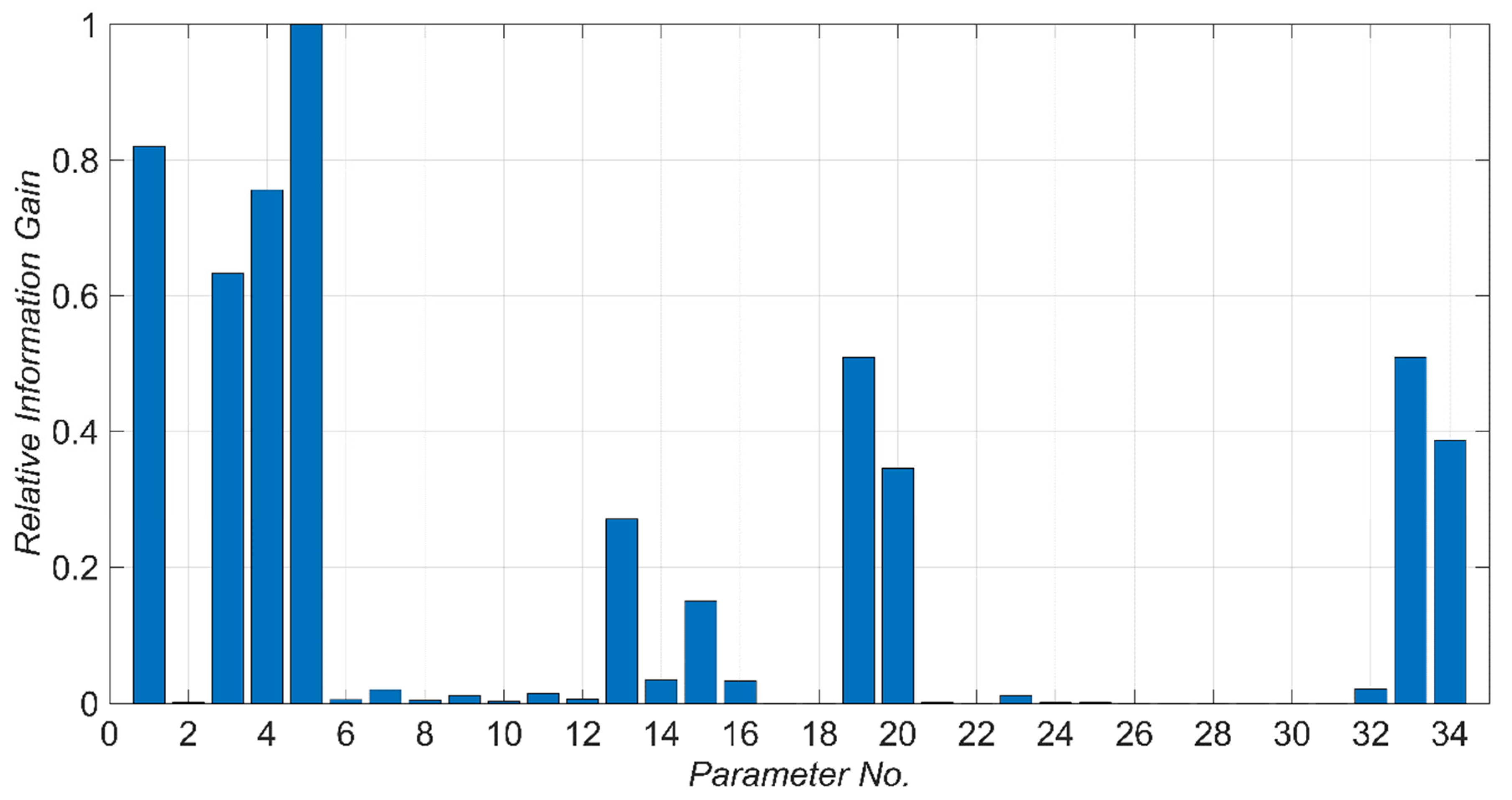
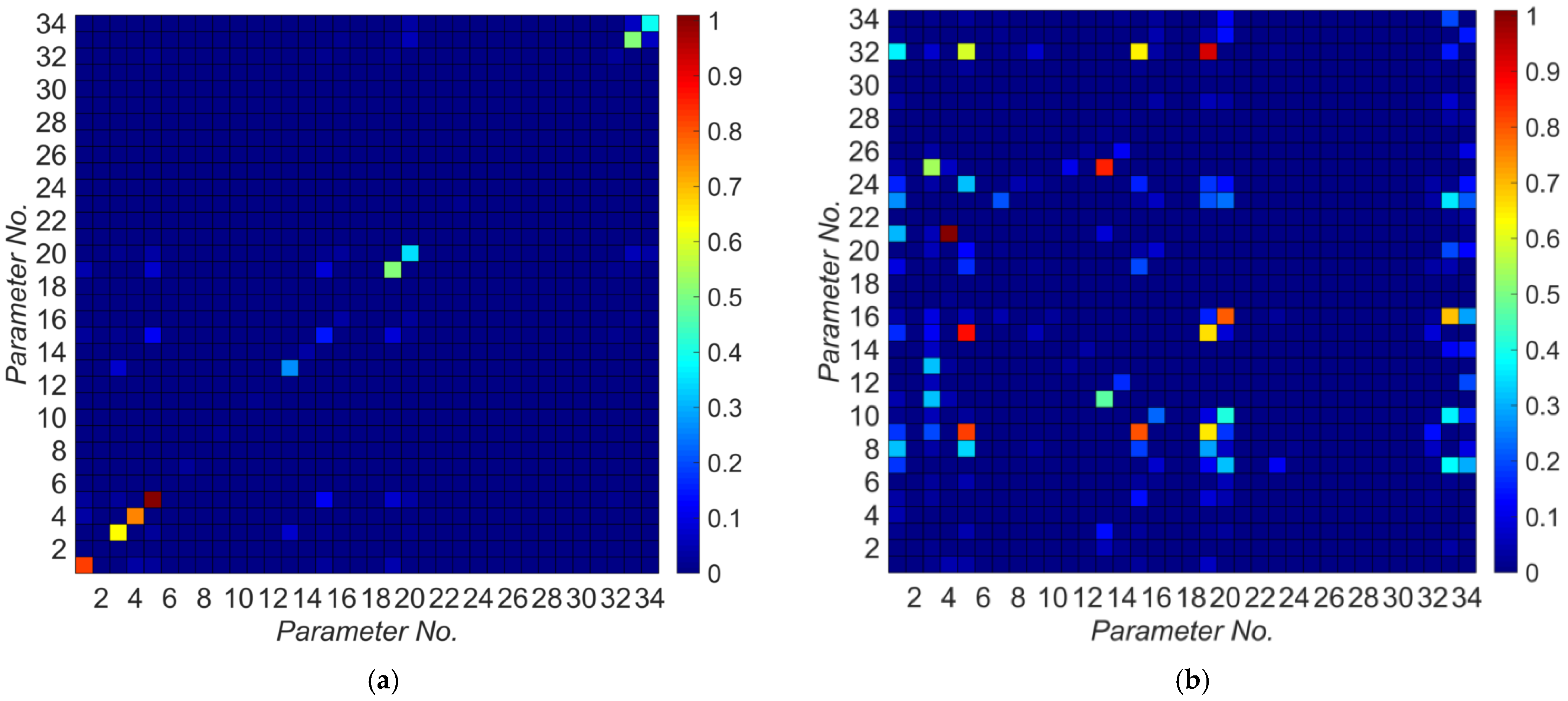
2.2. Formulation for the Identifiability Analysis
3. Verification Case Study Using the San Roque Canyon Bridge
3.1. FE Model of the SRC Bridge
3.2. Identifiability Analysis
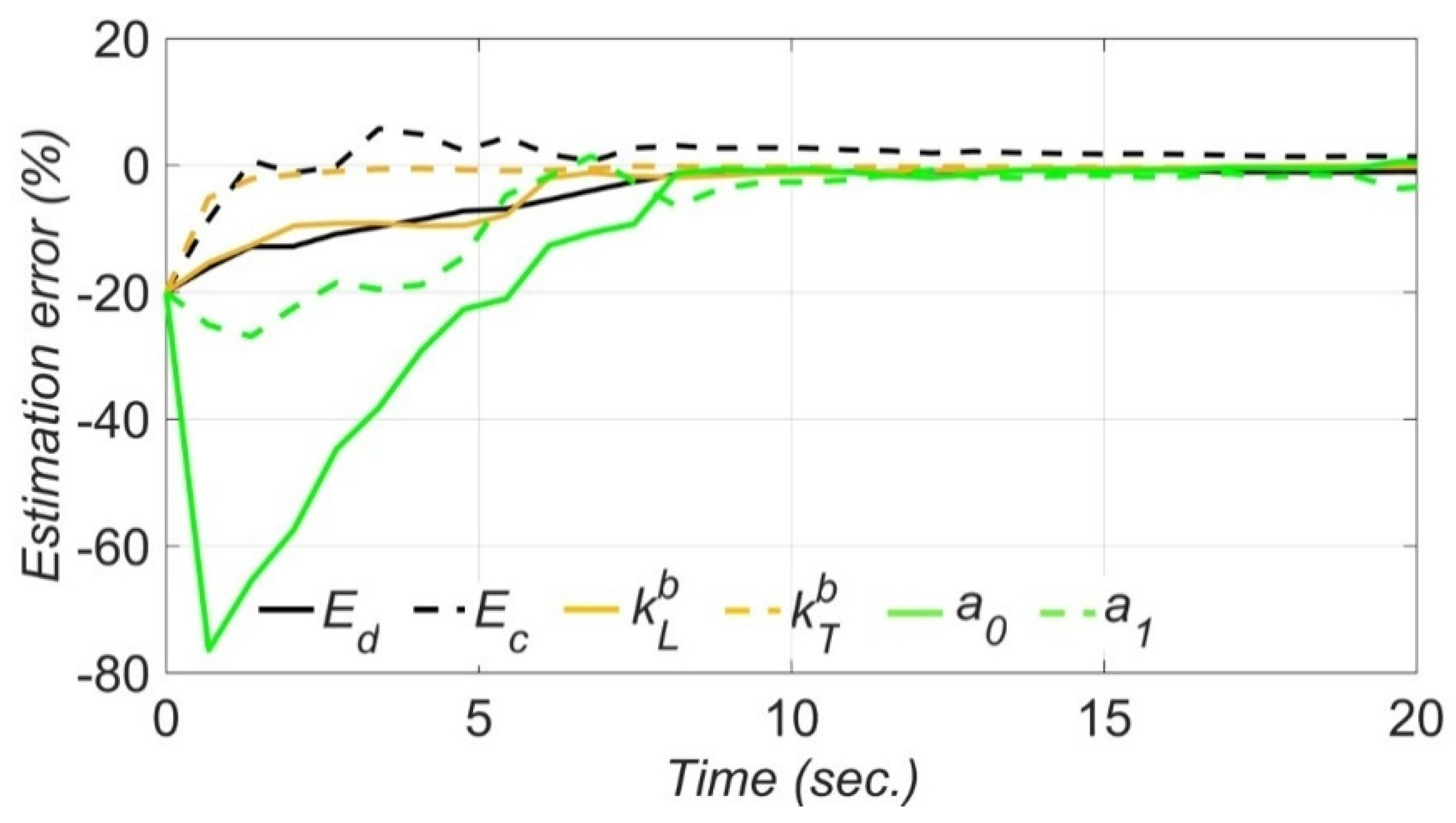
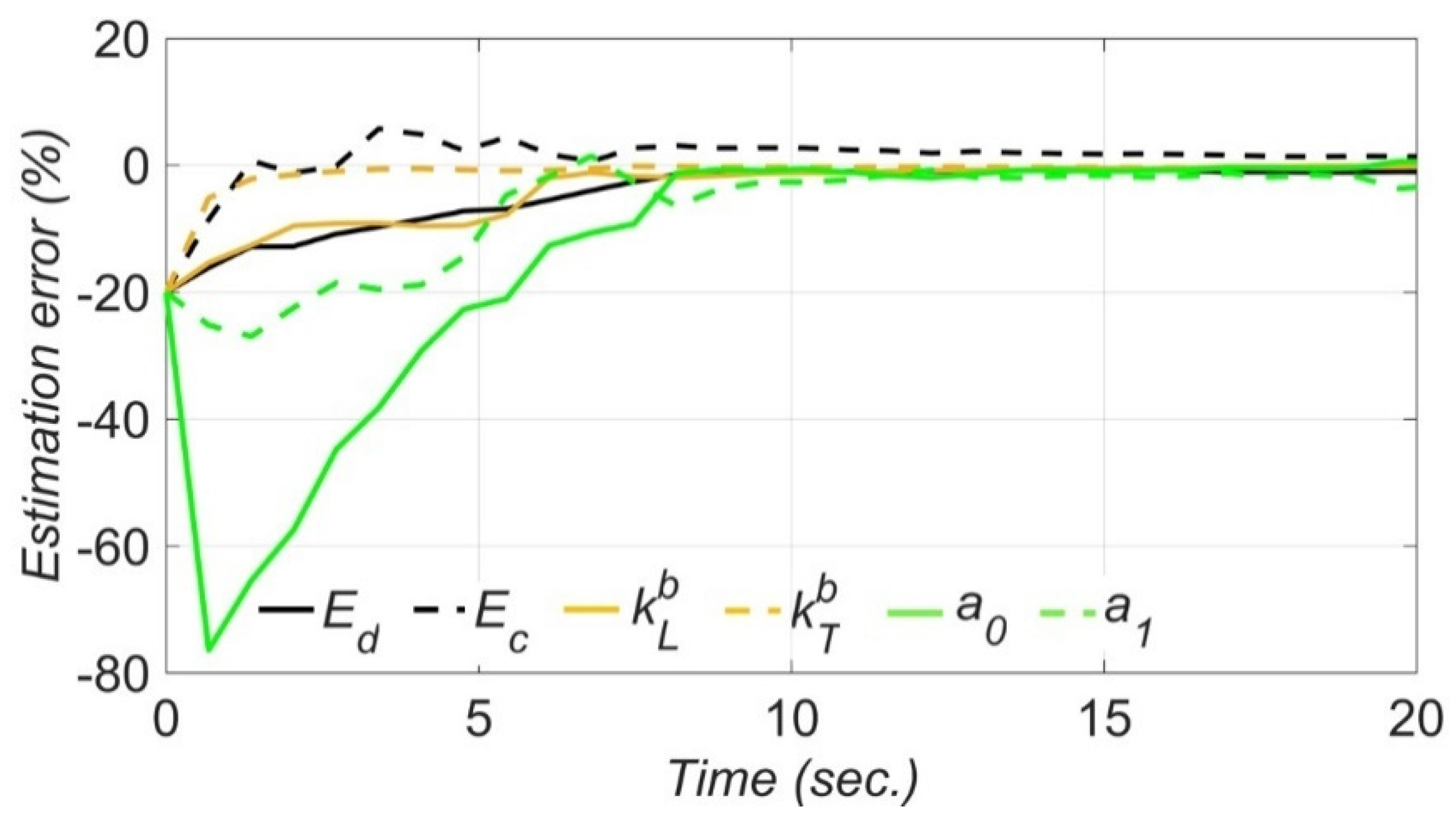
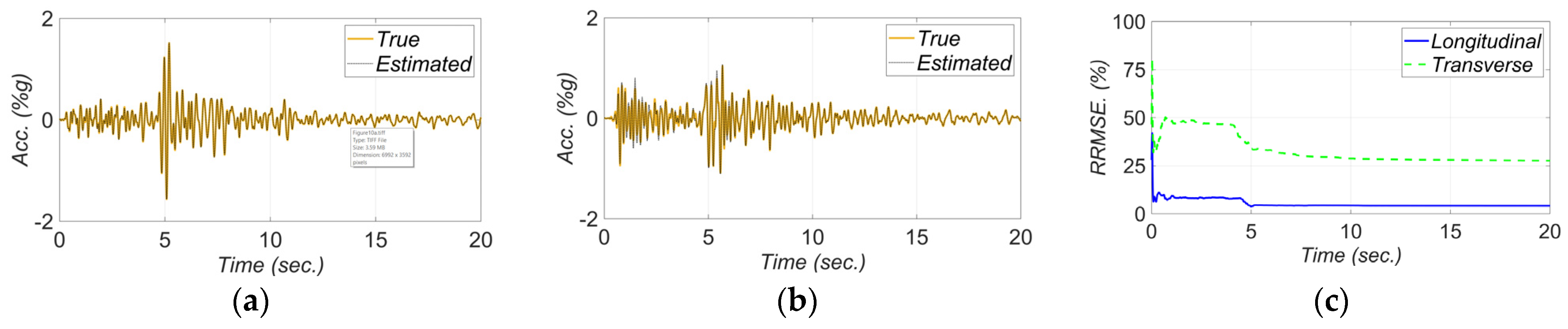
3.3. Verification Study Using Numerically Simulated Data
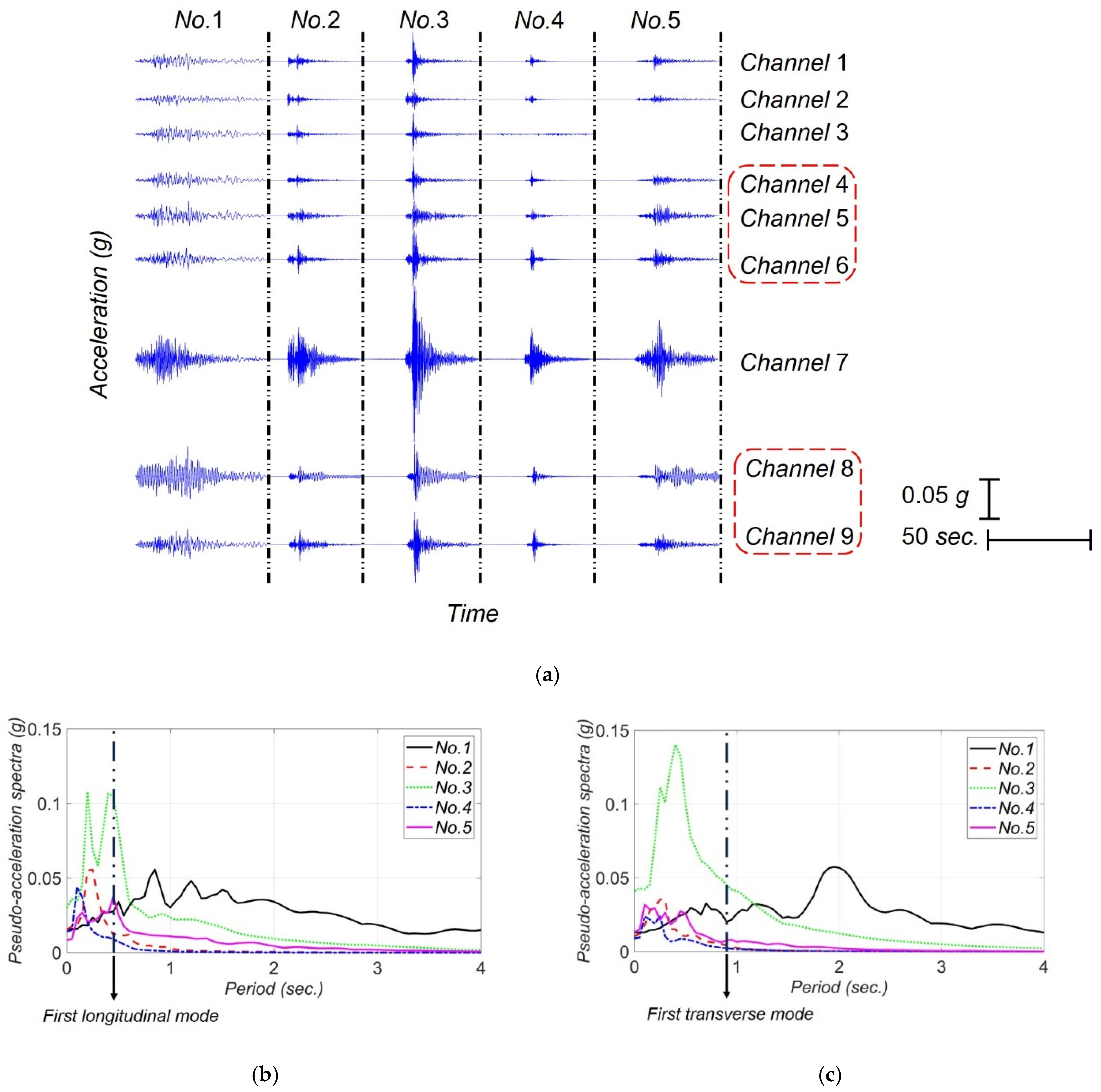
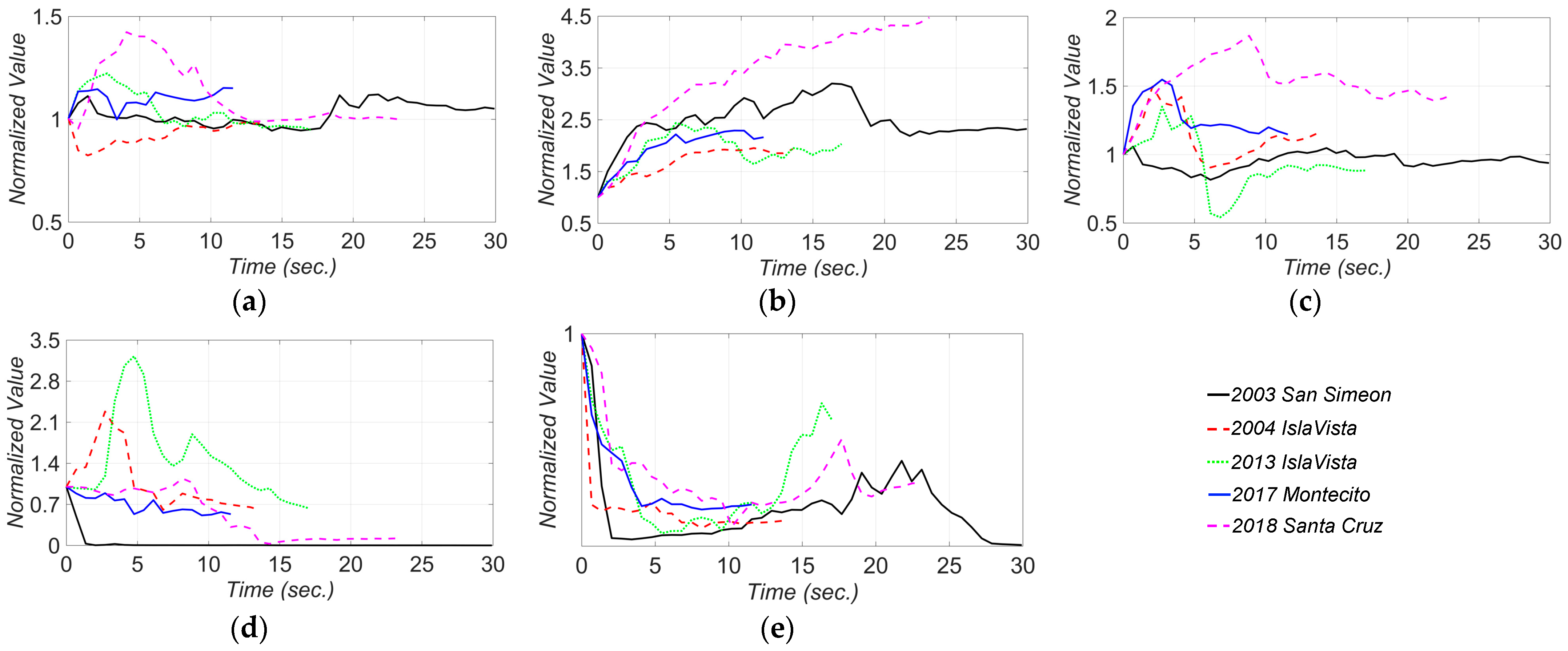
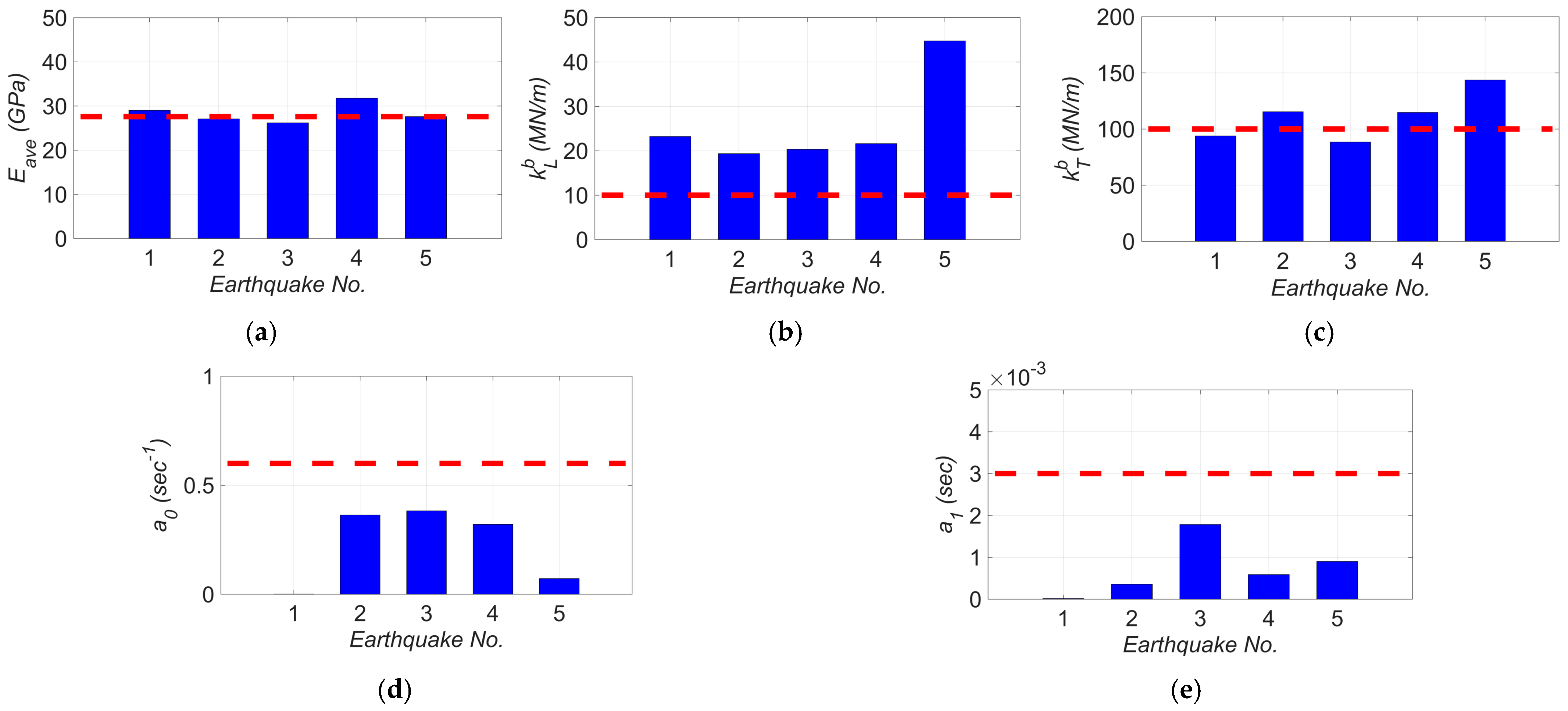
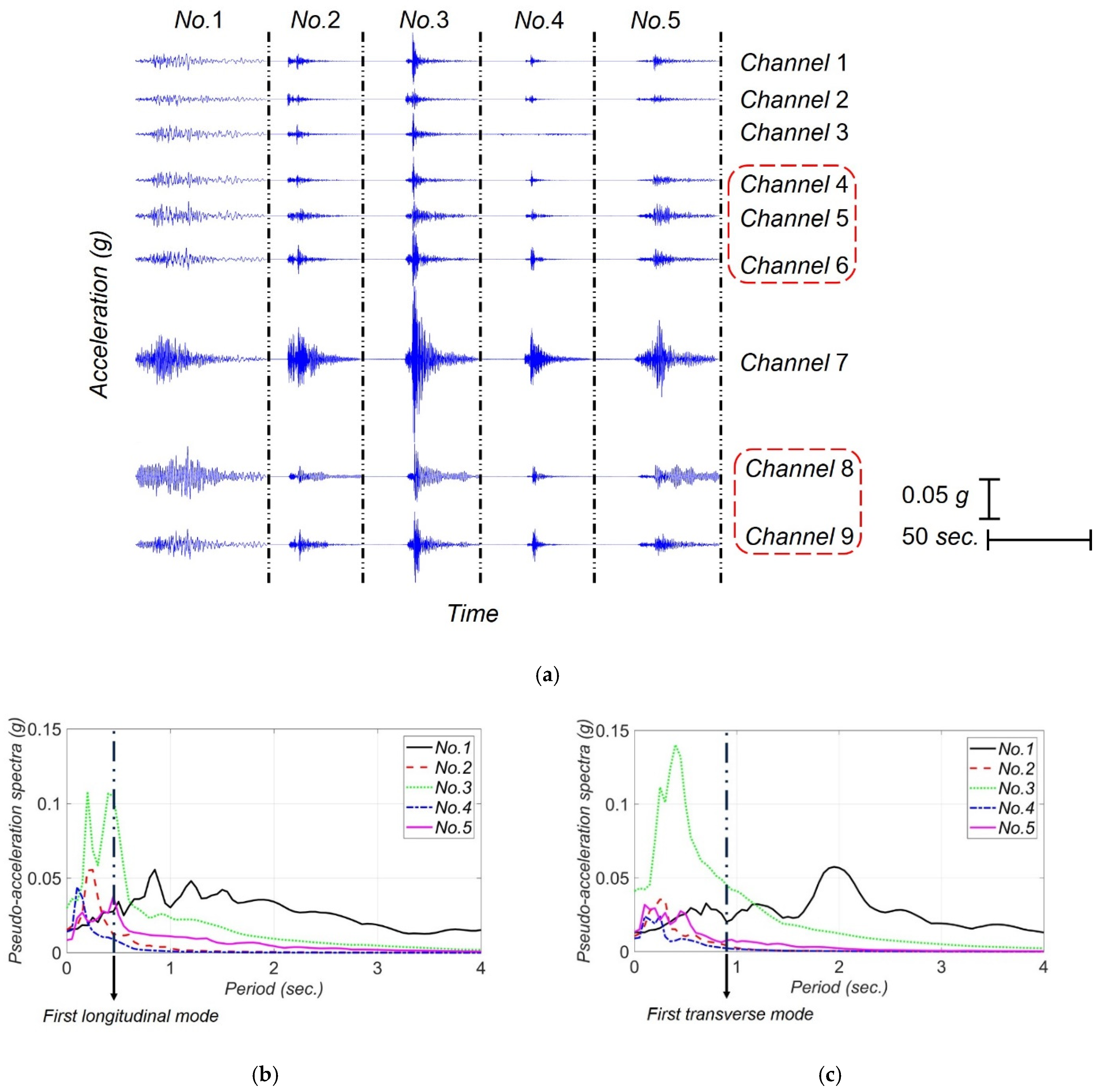
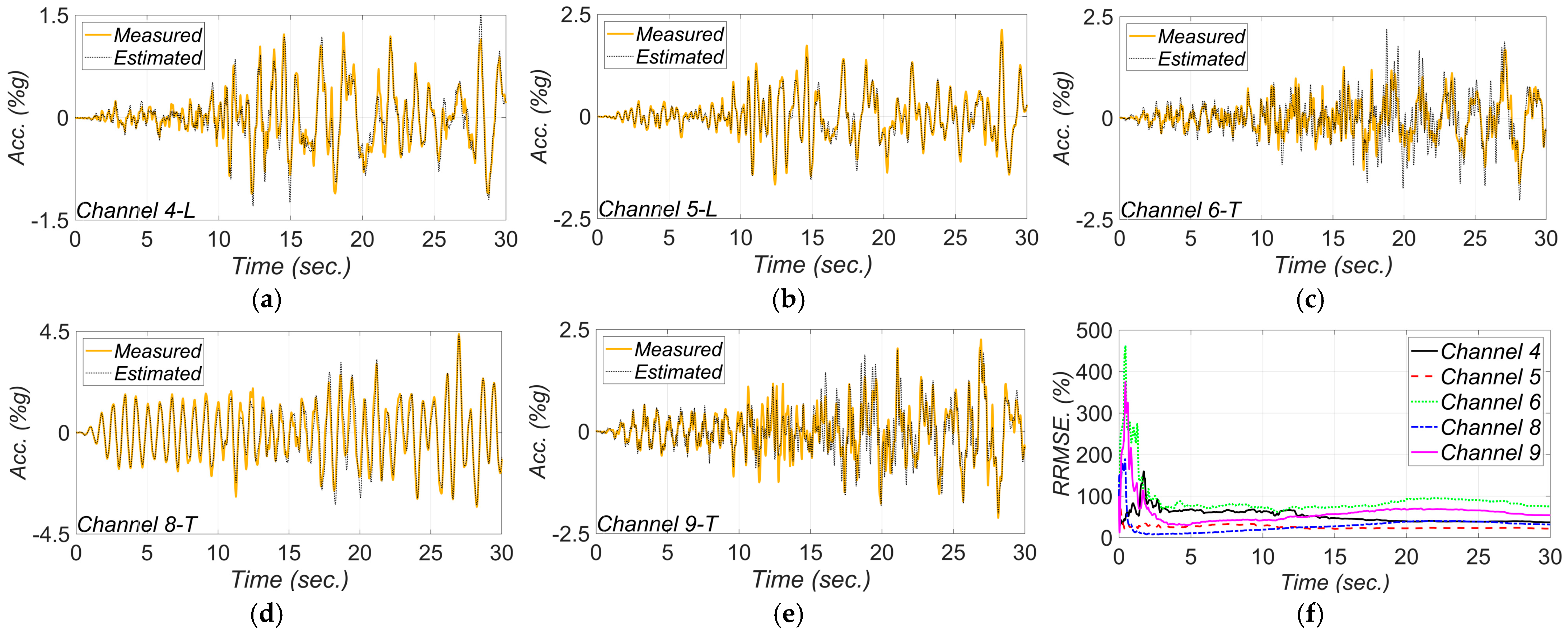
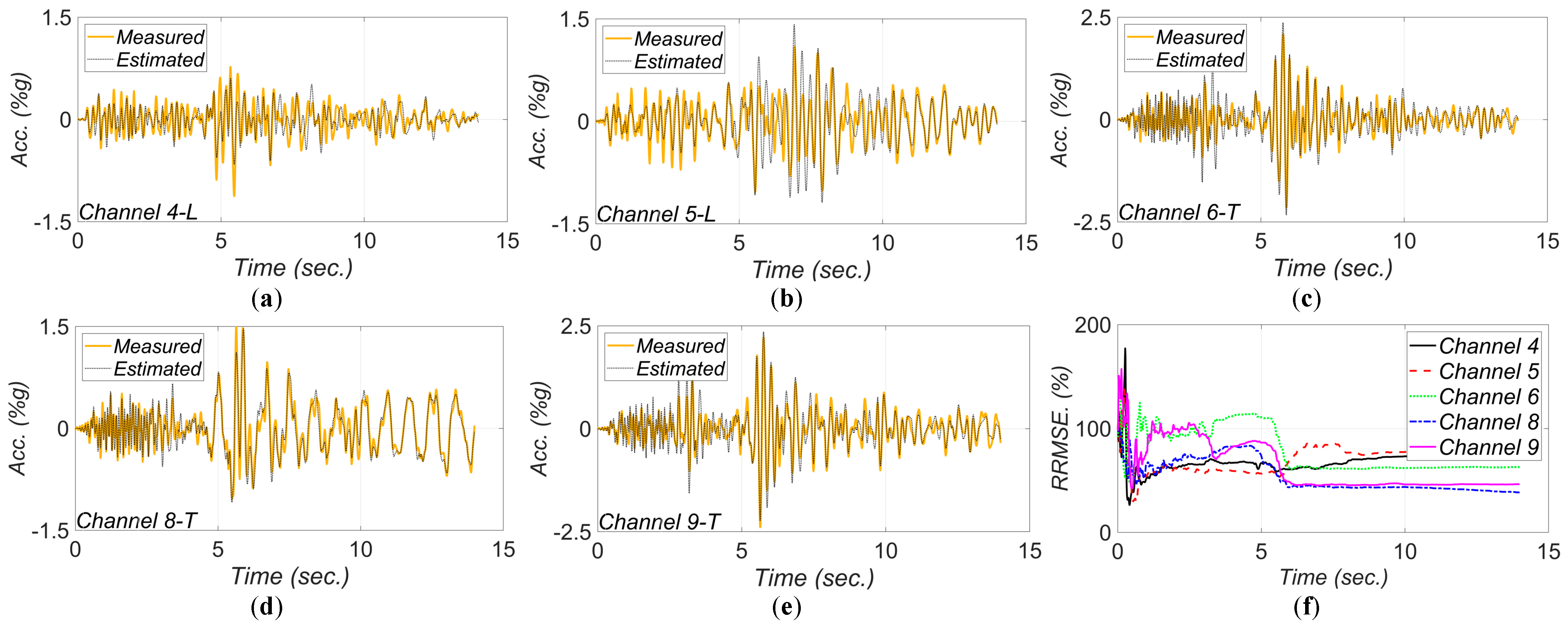
4. Case Study Using Real-World Earthquake Data
5. Digital Twin and Virtual Sensing Application
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karoumi, R. Some modeling aspects in the nonlinear finite element analysis of cable supported bridges. Comput. Struct. 1999, 71, 397–412. [Google Scholar] [CrossRef]
- Shamsabadi, A.; Rollins, K.M.; Kapuskar, M. Nonlinear soil–abutment–bridge structure interaction for seismic performance-based design. J. Geotech. Geoenviron. Eng. 2007, 133, 707–720. [Google Scholar] [CrossRef]
- Johnson, N.; Saiidi, M.S.; Sanders, D. Nonlinear earthquake response modeling of a large-scale two-span concrete bridge. J. Bridg. Eng. 2009, 14, 460–471. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P. Extended Kalman filter for material parameter estimation in nonlinear structural finite element models using direct differentiation method. Earthq. Eng. Struct. Dyn. 2015, 44, 1495–1522. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P.; Papadimitriou, C. Bayesian optimal estimation for output-only nonlinear system and damage identification of civil structures. Struct. Control Health Monit. 2018, 25, e2128. [Google Scholar] [CrossRef]
- Ghahari, S.F.; Abazarsa, F.; Ghannad, M.A.; Taciroglu, E. Response-only modal identification of structures using strong motion data. Earthq. Eng. Struct. Dyn. 2013, 42, 1221–1242. [Google Scholar] [CrossRef]
- Jaishi, B.; Ren, W.-X. Structural finite element model updating using ambient vibration test results. J. Struct. Eng. 2005, 131, 617–628. [Google Scholar] [CrossRef]
- Ghahari, S.F.; Abazarsa, F.; Taciroglu, E. Blind modal identification of non-classically damped structures under non-stationary excitations. Struct. Control Health Monit. 2016, 24, e1925. [Google Scholar] [CrossRef]
- Abazarsa, F.; Nateghi, F.; Ghahari, S.F.; Taciroglu, E. Extended blind modal identification technique for nonstationary excitations and its verification and validation. J. Eng. Mech. 2016, 142, 04015078. [Google Scholar] [CrossRef]
- Moaveni, B.; He, X.; Conte, J.P.; Restrepo, J.I. Damage identification study of a seven-story full-scale building slice tested on the UCSD-NEES shake table. Struct. Saf. 2010, 32, 347–356. [Google Scholar] [CrossRef] [Green Version]
- Shakal, A.F.; Ragsdale, J.T.; Sherburne, R.W. CSMIP strong-motion instrumentation and records from transportation structures—Bridges. In Lifeline Earthquake Engineering: Performance, Design and Construction; ASCE: San Fransisco, CA, USA, 1984; pp. 117–132. [Google Scholar]
- Malhotra, P.K.; Huang, M.J.; Shakal, A.F. Seismic interaction at separation joints of an instrumented concrete bridge. Earthq. Eng. Struct. Dyn. 1995, 24, 1055–1067. [Google Scholar] [CrossRef]
- Arici, Y.; Mosalam, K.M. System identification of instrumented bridge systems. Earthq. Eng. Struct. Dyn. 2003, 32, 999–1020. [Google Scholar] [CrossRef]
- Zhang, J.; Makris, N. Seismic response analysis of highway overcrossings including soil-structure interaction. Earthq. Eng. Struct. Dyn. 2002, 31, 1967–1991. [Google Scholar] [CrossRef] [Green Version]
- Wolf, J.P.; Deeks, A.J. Foundation Vibration Analysis: A Strength of Materials Approach, 1st ed.; Butterworth-Heinemann: Oxford, UK, 2004; Available online: https://www.elsevier.com/books/foundation-vibration-analysis/wolf/978-0-7506-6164-5 (accessed on 20 December 2021).
- Iguchi, M.; Luco, J.E. Dynamic response of flexible rectangular foundations on an elastic half-space. Earthq. Eng. Struct. Dyn. 1981, 9, 239–249. [Google Scholar] [CrossRef]
- Mahsuli, M.; Ghannad, M.A. The effect of foundation embedment on inelastic response of structures. Earthq. Eng. Struct. Dyn. 2009, 38, 423–437. [Google Scholar] [CrossRef]
- Luco, J.E.; Mita, A. Response of circular foundation to spatially random ground motion. J. Eng. Mech. 1987, 113, 1–15. [Google Scholar] [CrossRef]
- Stewart, J.P.; Fenves, G.L.; Seed, R.B. Seismic soil-structure interaction in buildings. I: Analytical methods. J. Geotech. Geoenvironmental Eng. 1999, 125, 26–37. [Google Scholar] [CrossRef]
- Wolf, J. Dynamic Soil-Structure Interaction; Prentice Hall, Inc.: Hoboken, NJ, USA, 1985. [Google Scholar]
- Astroza, R.; Ebrahimian, H.; Li, Y.; Conte, J.P. Bayesian nonlinear structural FE model and seismic input identification for damage assessment of civil structures. Mech. Syst. Signal Process. 2017, 93, 661–687. [Google Scholar] [CrossRef]
- Al-hussein, A.; Asce, A.M.; Haldar, A.; Asce, D.M. Novel Unscented Kalman filter for health assessment of structural systems with unknown input. J. Eng. Mech. 2015, 141, 04015012. [Google Scholar] [CrossRef]
- Song, M.; Astroza, R.; Ebrahimian, H.; Moaveni, B.; Papadimitriou, C. Adaptive Kalman filters for nonlinear finite element model updating. Mech. Syst. Signal Process. 2020, 143, 106837. [Google Scholar] [CrossRef]
- Astroza, R.; Ebrahimian, H.; Conte, J.P. Material parameter identification in distributed plasticity FE models of frame-type structures using nonlinear stochastic filtering. J. Eng. Mech. 2015, 141, 04014149. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durran-Whyte, H. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Automat. Contr. 2000, 45, 477. [Google Scholar] [CrossRef] [Green Version]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the SPIE, Orlando, FL, USA, 20–25 April 1997; pp. 182–193. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Kohler, M.; Massari, A.; Asimaki, D. Parametric estimation of dispersive viscoelastic layered media with application to structural health monitoring. Soil Dyn. Earthq. Eng. 2018, 105, 204–223. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P.; Bitmead, R.R. Information-theoretic approach for identifiability assessment of nonlinear structural finite-element models. J. Eng. Mech. 2019, 145, 04019039. [Google Scholar] [CrossRef]
- Santa Barbara-San Roque Canyon Bridge. 2022. Available online: https://www.strongmotioncenter.org/NCESMD/photos/CGS/lllayouts/ll25749.pdf (accessed on 20 December 2021).
- Center for Engineering Strong Motion Data. 2022. Available online: https://www.cesmd.org (accessed on 20 December 2021).
- McKenna, F. OpenSees: A framework for earthquake engineering simulation. Comput. Sci. Eng. 2011, 13, 58–66. [Google Scholar] [CrossRef]
- Caltrans, Caltrans Seismic Design Criteria, v.1.7. 2013. Available online: https://dot.ca.gov/-/media/dot-media/programs/engineering/documents/seismicdesigncriteria-sdc/f0007585seismicdesigncriteriasdc17fullversionoeereleasea11y.pdf (accessed on 20 December 2021).
- Aviram, A.; Mackie, K.; Stojadinovic, B. Guidelines for Nonlinear Analysis of Bridge Structures in California; Pacific Earthquake Engineering Research Center: Berkeley, CA, USA, 2008. Available online: https://ntrl.ntis.gov/NTRL/dashboard/searchResults/titleDetail/PB2012106297.xhtml (accessed on 20 December 2021).
- Kaviani, P.; Zareian, F.; Taciroglu, E. Seismic behavior of reinforced concrete bridges with skew-angled seat-type abutments. Eng. Struct. 2012, 45, 137–150. [Google Scholar] [CrossRef]
- Mander, J.B.; Priestley, M.J.N.; Park, R. Theoretical stress-strain model for confined concrete. J. Struct. Eng. 2008, 114. [Google Scholar] [CrossRef] [Green Version]
- Timoshenko, S. Theory of Plates and Shells; McGraw–Hill Book Co., Inc.: New York, NY, USA, 1940; ISBN 0-07-085820-9. [Google Scholar]
- Silva, P.F.; Megally, S.; Seible, F. Seismic performance of sacrificial exterior shear keys in bridge abutments. Earthq. Spectra 2009, 25, 643–664. [Google Scholar] [CrossRef]
- Kim, S.; Stewart, J.P. Kinematic soil-structure interaction from strong motion recordings. J. Geotech. Geoenviron. Eng. 2003, 129, 323–335. [Google Scholar] [CrossRef]
- Khalili-Tehrani, P.; Shamsabadi, A.; Stewart, J.P.; Taciroglu, E. Backbone curves with physical parameters for passive lateral response of homogeneous abutment backfills. Bull. Earthq. Eng. 2016, 14, 3003–3023. [Google Scholar] [CrossRef]
- California. Department of Transportation. Engineering Service Center, S.S.R. Project, Field Investigation Report for Abutment Backfill Characterization, Citeseer. 2005. Available online: https://searchworks.stanford.edu/view/8447399 (accessed on 20 December 2021).
- Stewart, J.P.; Taciroglu, E.; Wallace, J.W.; Ahlberg, E.R.; Lemnitzer, A.; Rha, C.; Tehrani, P.; Keowen, S.; Nigbor, R.L.; Salamanca, A. Full Scale Cyclic Testing of Foundation Support Systems for Highway Bridges. Part II: Abutment Backwalls; Structural and Geotechnical Engineering Laboratory, University of California: Los Angeles, CA, USA, 2007. [Google Scholar]
- Gazetas, G. Formulas and charts for impedances of surface and embedded foundations. J. Geotech. Eng. 2008, 117, 1363–1381. [Google Scholar] [CrossRef]
- Pais, A.; Kausel, E. Approximate formulas for dynamic stiffnesses of rigid foundations. Soil Dyn. Earthq. Eng. 1988, 7, 213–227. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.P.; de Callafon, R.A. Nonlinear finite element model updating for damage identification of civil structures using batch Bayesian estimation. Mech. Syst. Signal Process. 2017, 84, 194–222. [Google Scholar] [CrossRef]
- Nabiyan, M.S.; Khoshnoudian, F.; Moaveni, B.; Ebrahimian, H. Mechanics-based model updating for identification and virtual sensing of an offshore wind turbine using sparse measurements. Struct. Control Health Monit. 2021, 28, e2647. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Earthquake | Date | Distance (km) | PGA (g) | PSA in Transverse Direction (g) | PSA in Vertical Direction (g) | PSA in Longitudinal Direction (g) |
|---|---|---|---|---|---|---|---|
| 1 | San Simeon | 22 December 2003 | 187.0 | 0.015 | 0.045 | 0.042 | 0.022 |
| 2 | IslaVista | 9 May 2004 | 27.2 | 0.016 | 0.026 | 0.047 | 0.013 |
| 3 | IslaVista | 29 May 2013 | 18.0 | 0.041 | 0.060 | 0.150 | 0.040 |
| 4 | Montecito | 23 April 2017 | 9.5 | 0.022 | 0.024 | 0.045 | 0.014 |
| 5 | Santa Cruz | 5 April 2018 | 67.9 | 0.016 | 0.021 | 0.058 | 0.019 |
| No. | Parameter | Description | Nominal Value |
|---|---|---|---|
| 1 | Elastic modulus of deck | 27.8 GPa | |
| 2 | Compressive strength of column | 40.4 MPa | |
| 3 | Initial elastic modulus of column | 27.8 GPa | |
| 4 | Transverse elastomeric shear stiffness of bearing pad | ||
| 5 | Longitudinal elastomeric shear stiffness of bearing pad | ||
| 6 | Embankment mass for abutment | 53.0 kg | |
| 7 | Vertical soil-foundation stiffness under pier | ||
| 8 | Vertical soil-foundation damping coefficient under pier | ||
| 9 | Longitudinal soil-foundation stiffness under pier | ||
| 10 | Longitudinal soil-foundation damping coefficient under pier | ||
| 11 | Transverse soil-foundation stiffness under pier | ||
| 12 | Transverse soil-foundation damping coefficient under pier | ||
| 13 | Rotational soil-foundation stiffness under pier about the longitudinal axis | ||
| 14 | Rotational soil-foundation damping coefficient under pier about the longitudinal axis | ||
| 15 | Rotational soil-foundation stiffness under pier about the transverse axis | ||
| 16 | Rotational soil-foundation damping coefficient under pier about the transverse axis | ||
| 17 | Rotational soil-foundation stiffness under pier about the vertical axis | ||
| 18 | Rotational soil-foundation damping coefficient under pier about the vertical axis | ||
| 19 | Longitudinal soil-foundation stiffness under abutment | ||
| 20 | Longitudinal soil-foundation damping coefficient under abutment | ||
| 21 | Transverse soil-foundation stiffness under abutment | ||
| 22 | Transverse soil-foundation damping coefficient under abutment | ||
| 23 | Vertical soil-foundation stiffness under abutment | ||
| 24 | Vertical soil-foundation damping coefficient under abutment | ||
| 25 | Rotational soil-foundation stiffness under abutment about its longitudinal axis | ||
| 26 | Rotational soil-foundation damping coefficient under abutment about the longitudinal axis | ||
| 27 | Rotational soil-foundation stiffness under abutment about the vertical axis | ||
| 28 | Rotational soil-foundation damping coefficient under abutment about the vertical axis | ||
| 29 | Far-field soil-embankment stiffness in longitudinal direction | ||
| 30 | Far-field soil-embankment radiation damping coefficient in the longitudinal direction | ||
| 31 | Far-field soil-embankment material damping coefficient in the longitudinal direction | ||
| 32 | Soil-backwall initial stiffness in the longitudinal direction | ||
| 33 | Mass proportional Rayleigh damping coefficient | ||
| 34 | Stiffness proportional Rayleigh damping coefficient | 0.003 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghahari, F.; Malekghaini, N.; Ebrahimian, H.; Taciroglu, E. Bridge Digital Twinning Using an Output-Only Bayesian Model Updating Method and Recorded Seismic Measurements. Sensors 2022, 22, 1278. https://doi.org/10.3390/s22031278
Ghahari F, Malekghaini N, Ebrahimian H, Taciroglu E. Bridge Digital Twinning Using an Output-Only Bayesian Model Updating Method and Recorded Seismic Measurements. Sensors. 2022; 22(3):1278. https://doi.org/10.3390/s22031278
Chicago/Turabian StyleGhahari, Farid, Niloofar Malekghaini, Hamed Ebrahimian, and Ertugrul Taciroglu. 2022. "Bridge Digital Twinning Using an Output-Only Bayesian Model Updating Method and Recorded Seismic Measurements" Sensors 22, no. 3: 1278. https://doi.org/10.3390/s22031278
APA StyleGhahari, F., Malekghaini, N., Ebrahimian, H., & Taciroglu, E. (2022). Bridge Digital Twinning Using an Output-Only Bayesian Model Updating Method and Recorded Seismic Measurements. Sensors, 22(3), 1278. https://doi.org/10.3390/s22031278