
Semi-Empirical Time-Dependent Parameter of Shear Strength for Traction Force between Deep-Sea Sediment and Tracked Miner


Abstract
:1. Introduction
2. Time-Dependent Transformation of Shear Strength Parameter
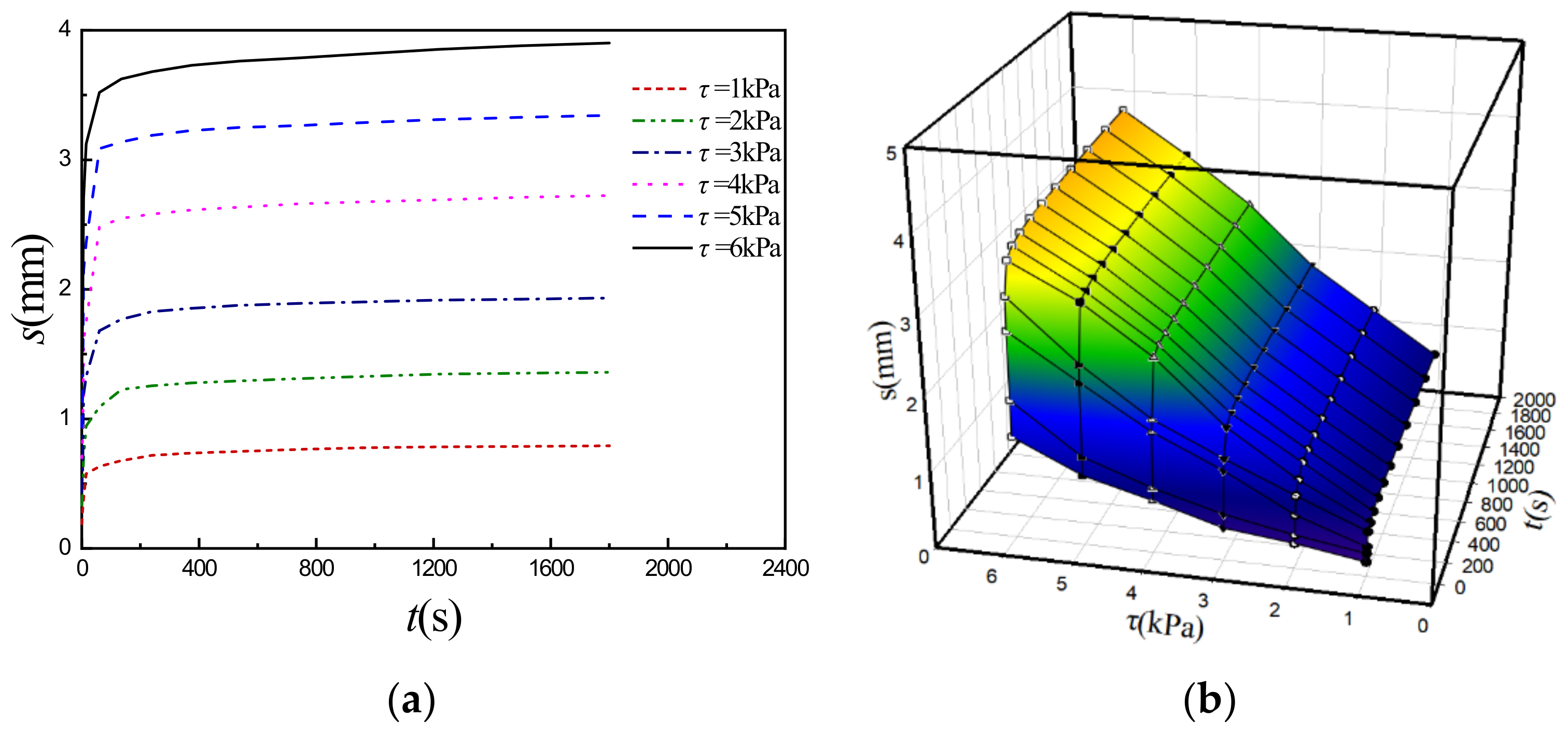
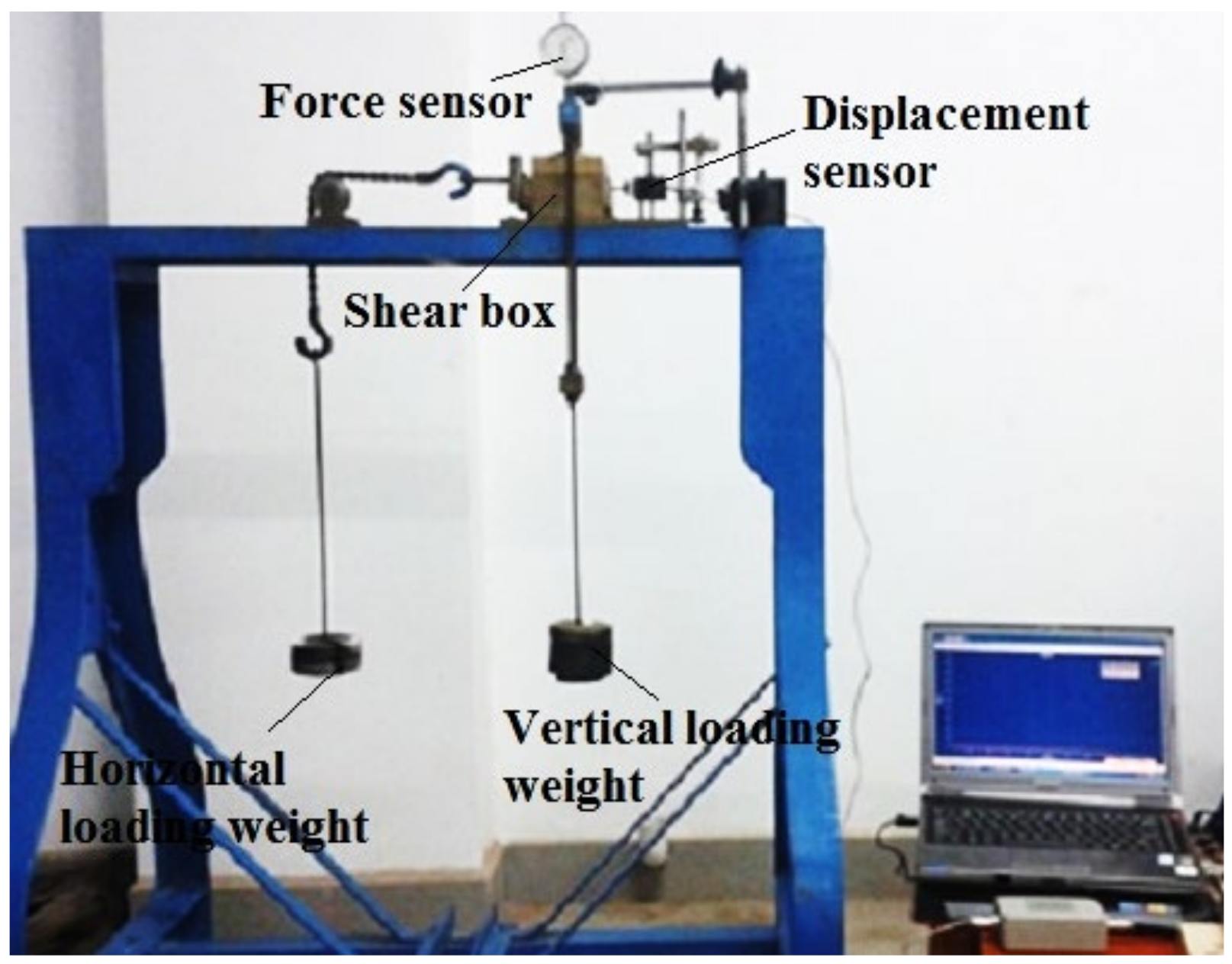
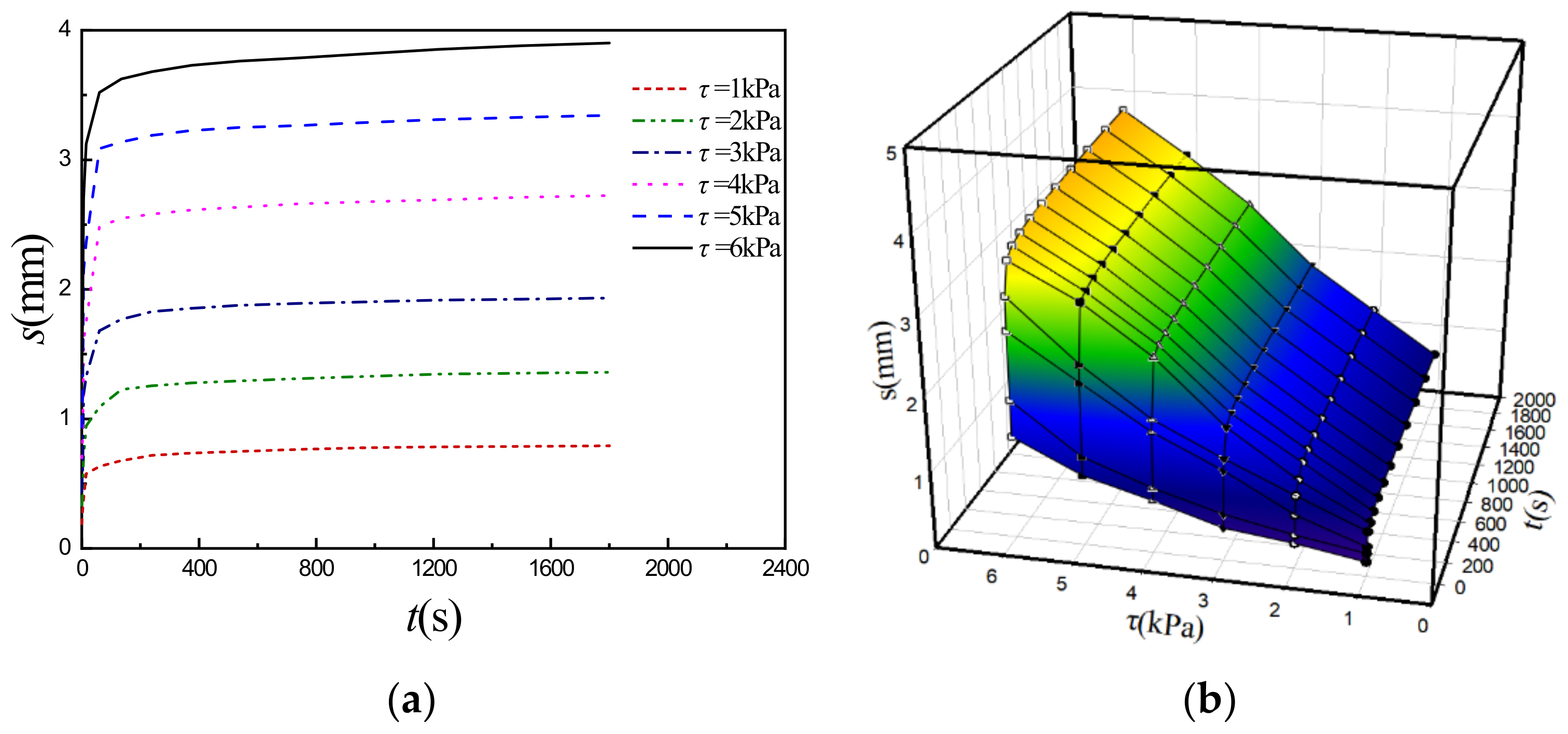
2.1. Direct Shear Creep Experiment of Simulant Deep-Sea Sediment
2.2. Direct Shear Rheological Constitutive Model
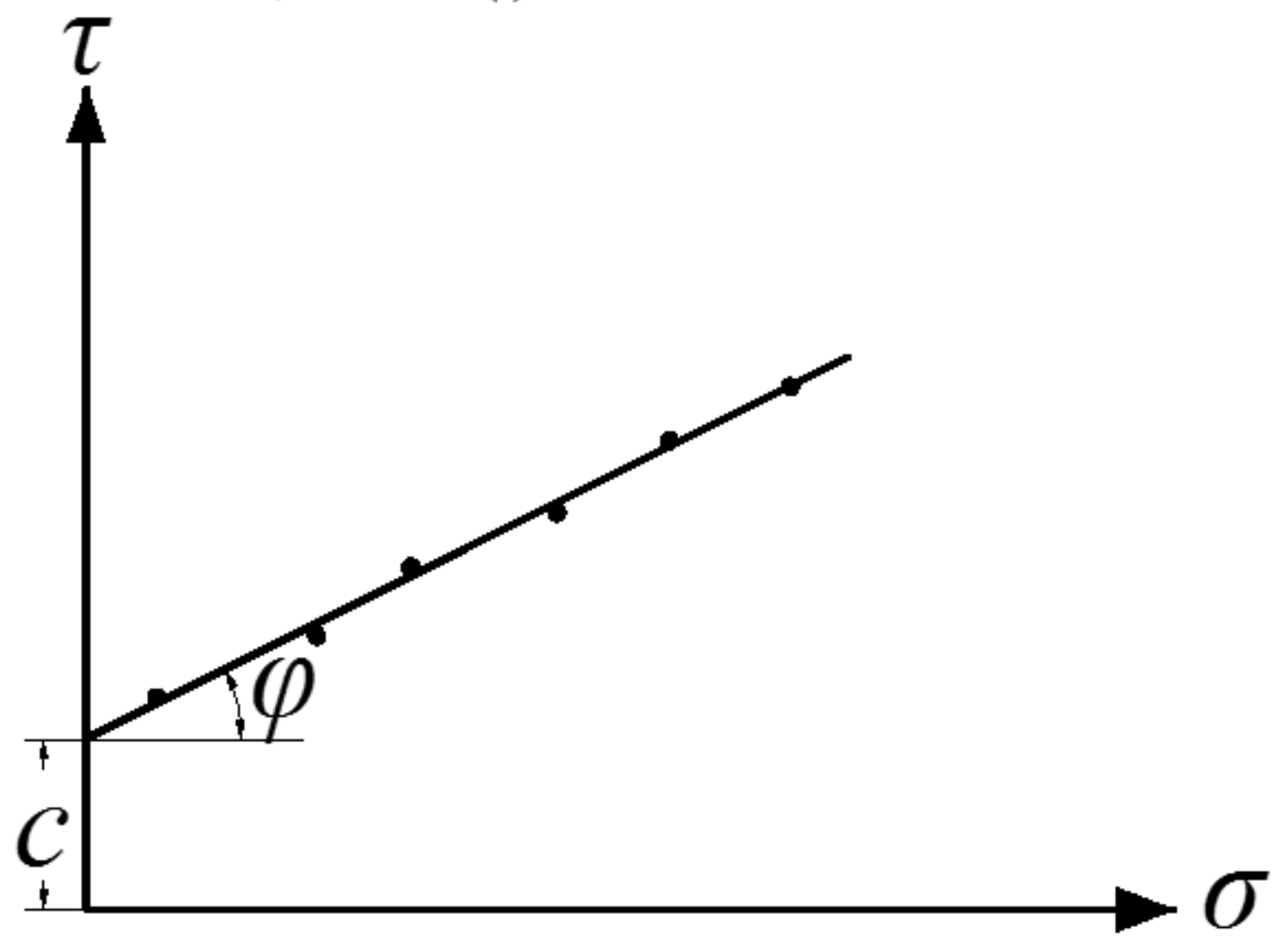
2.3. Time-Dependent Parameters of Shear Strength
3. Time-Dependent Traction Force of Deep-Sea Miner Crawler
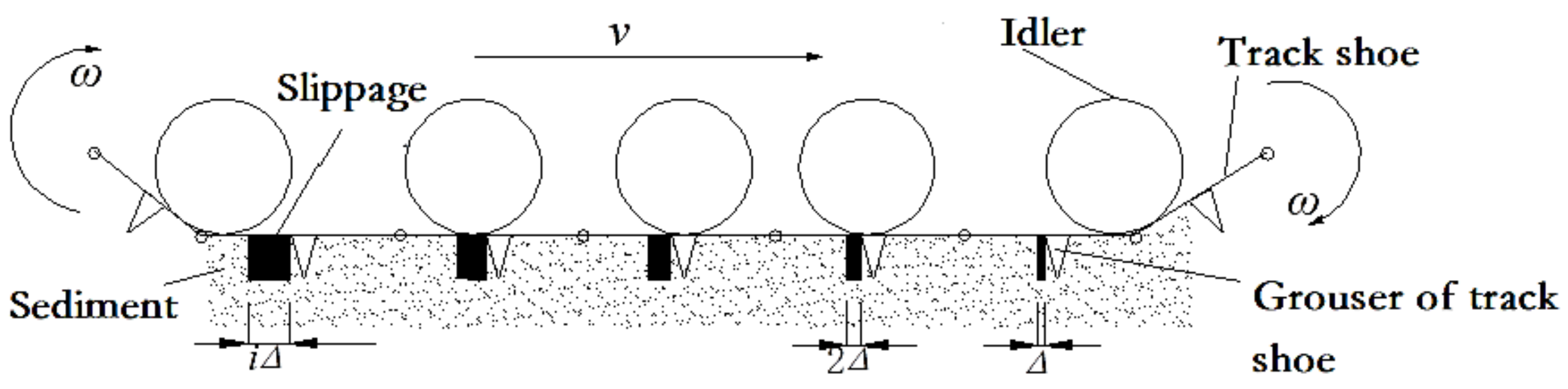
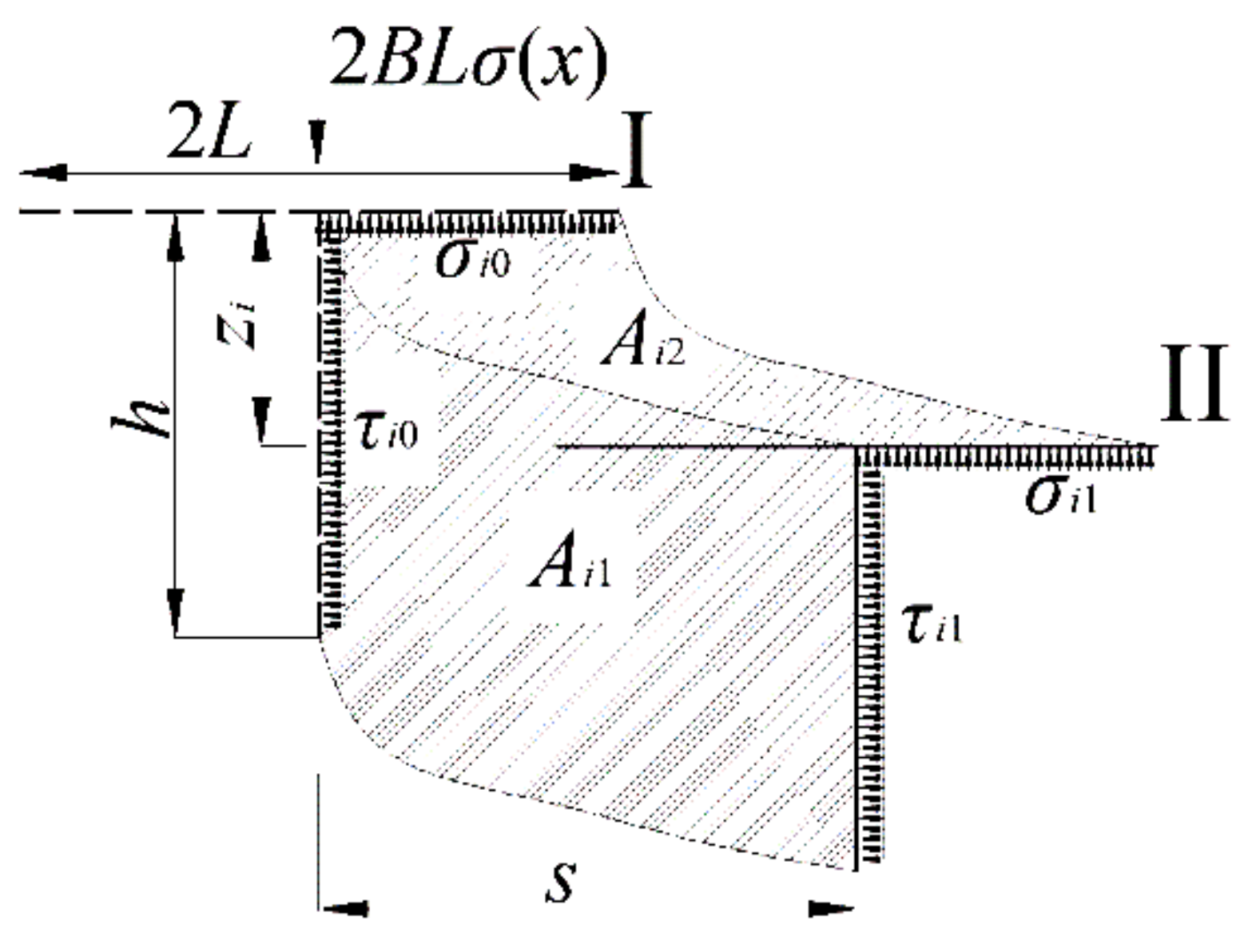
3.1. Traction Force Model
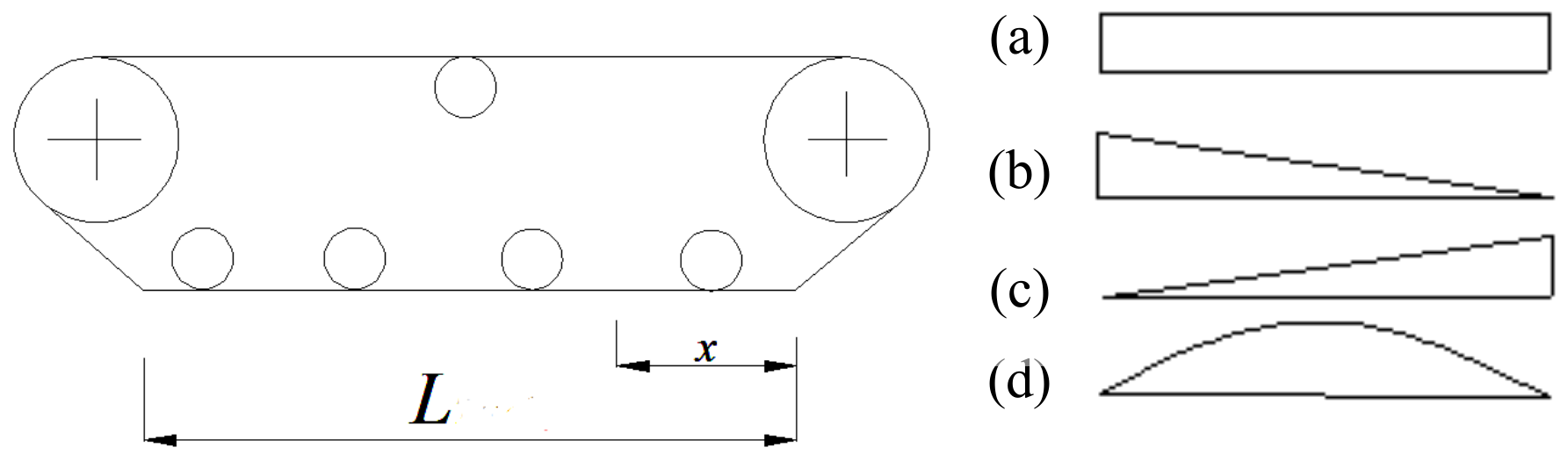
3.2. Time-Dependent Traction Force T under Different Grounding Pressure Distributions
- (a)
- Uniform distribution,
- (b)
- Linear decrement distribution,
- (c)
- Linear increment distribution,
- (d)
- Sine distribution,
4. Verification and Analysis of the Traction Force
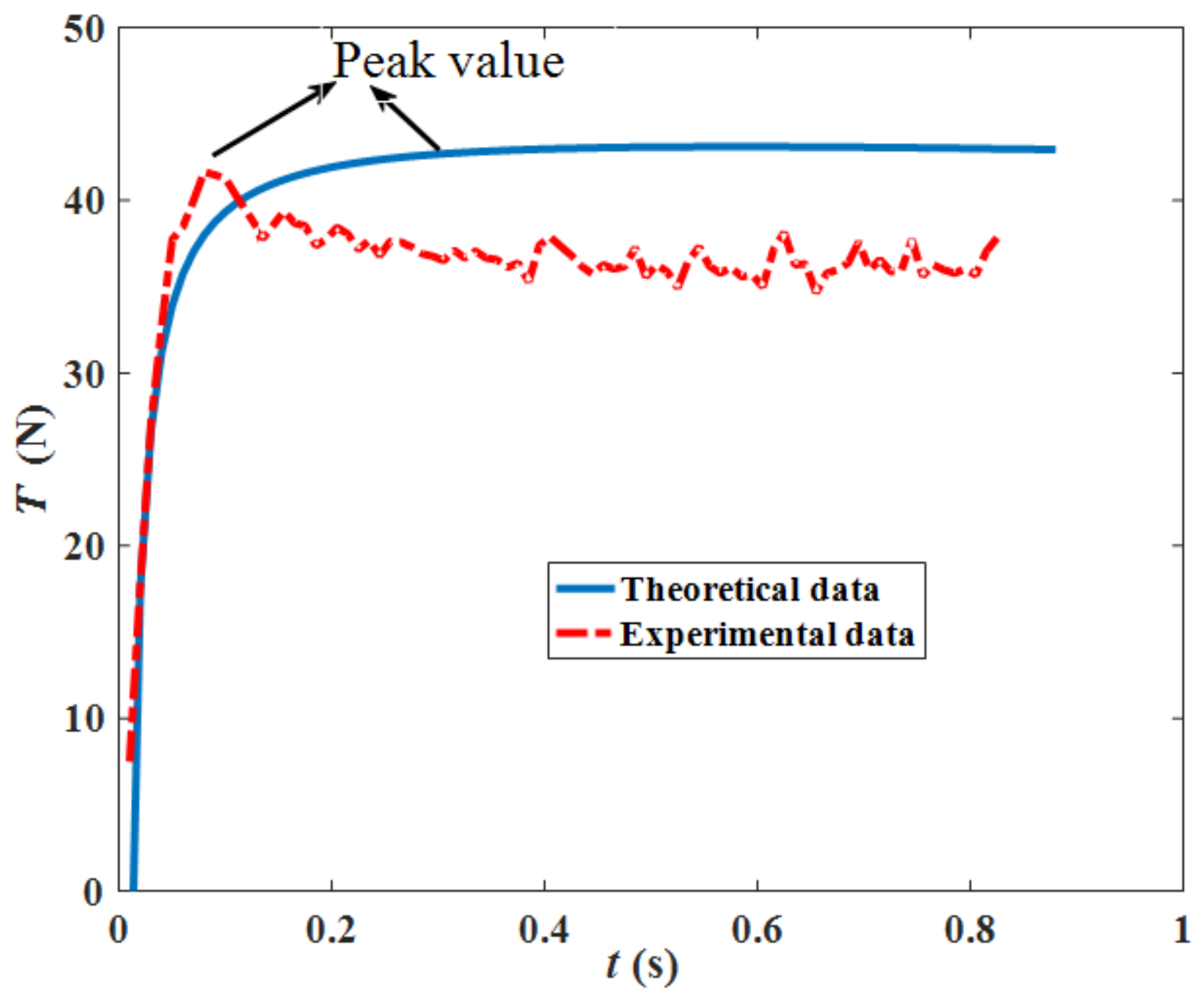
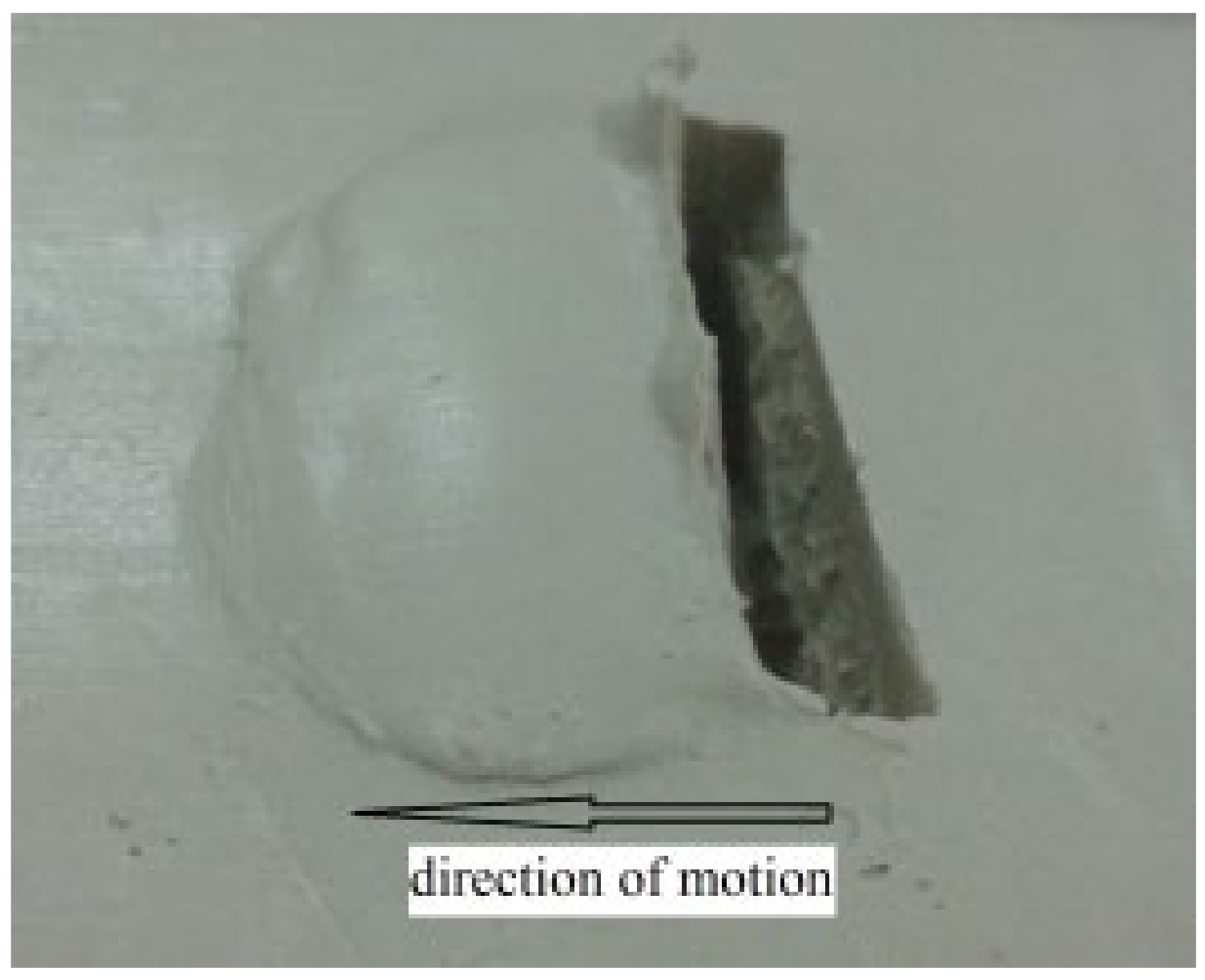
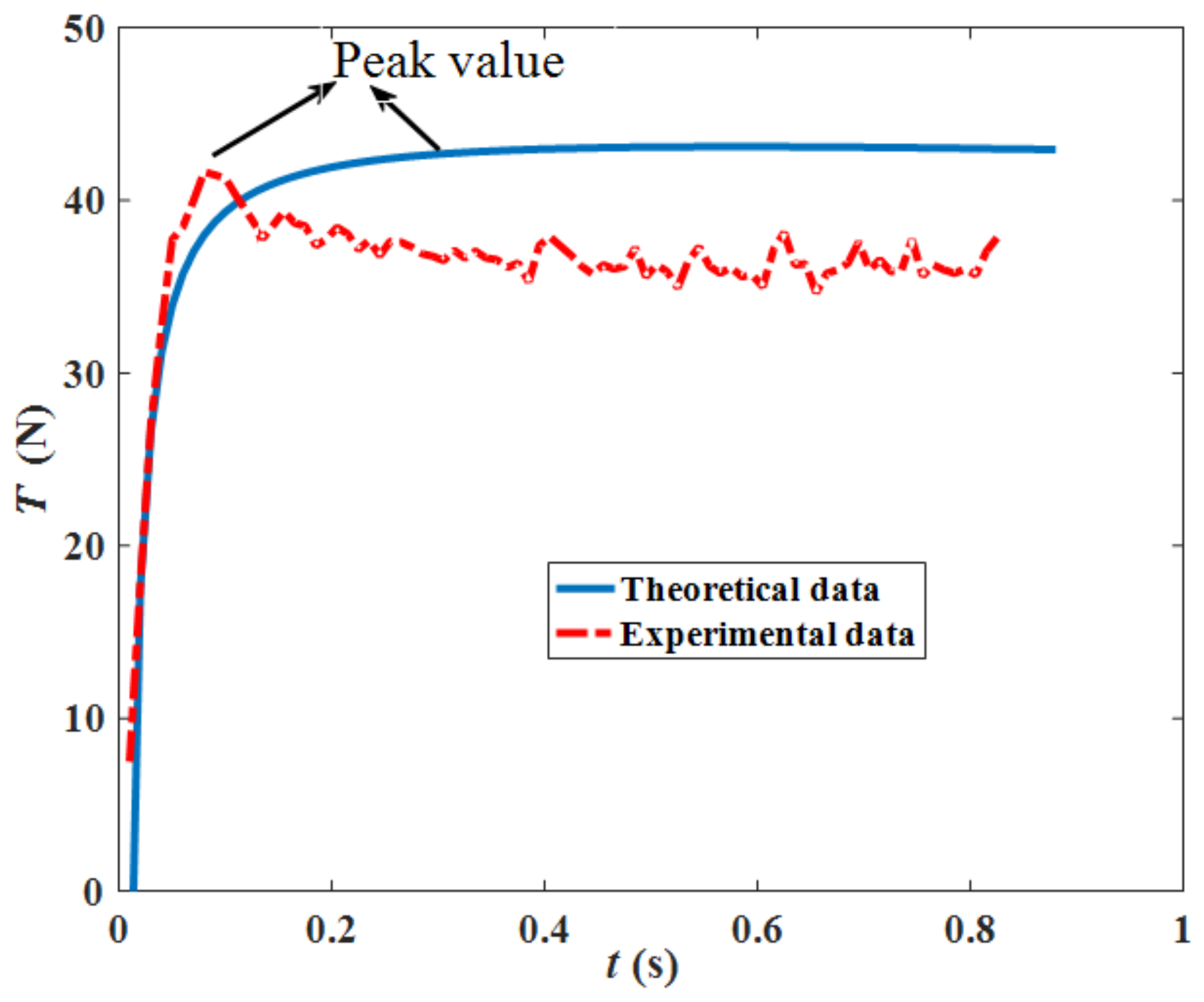
4.1. Verification of the Traction Force Model
4.2. Influence of Time and Track Shoe Number on the Traction Force under Different Grounding Pressure Distributions
4.2.1. Traction Force (T)- Time (t) Relationships
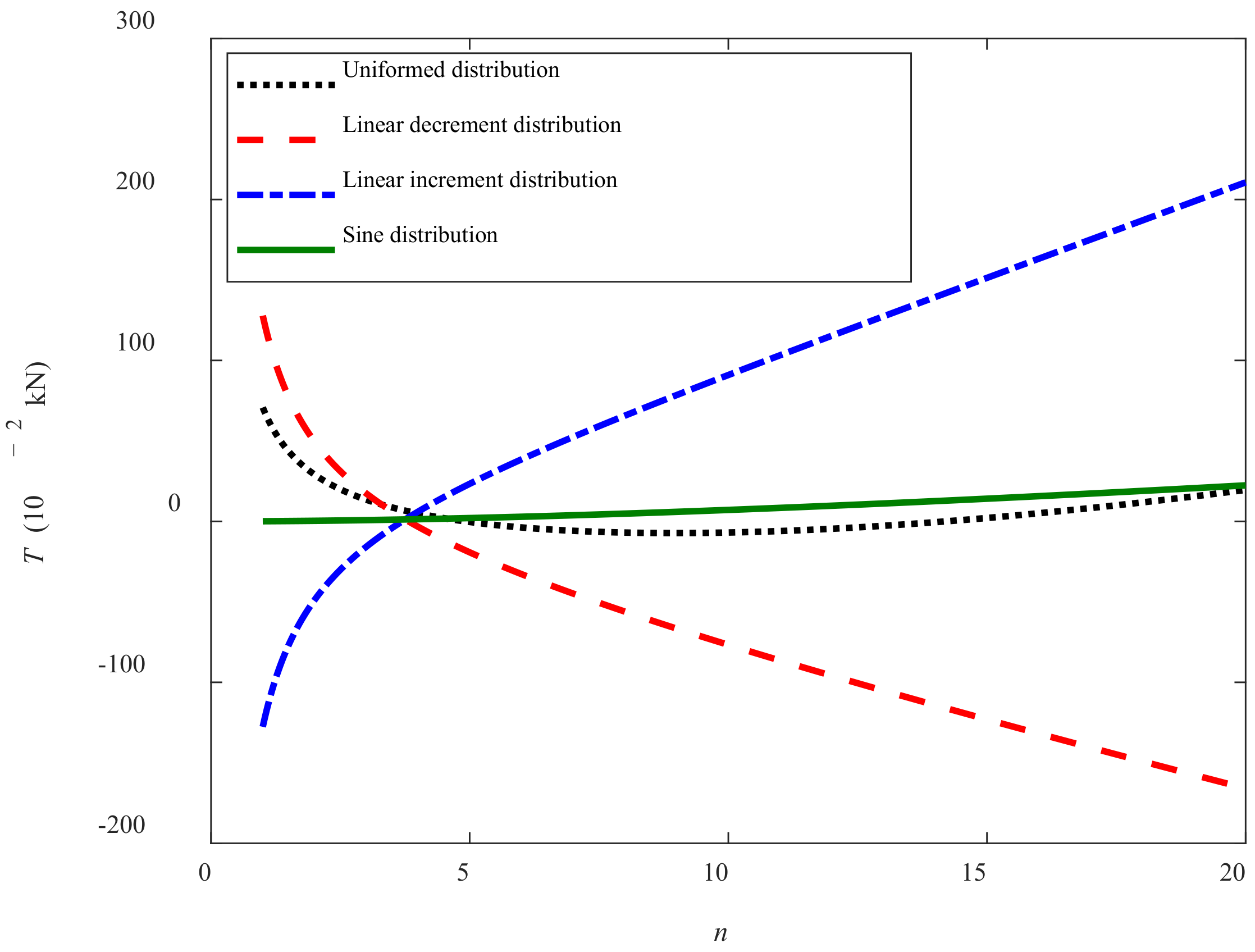
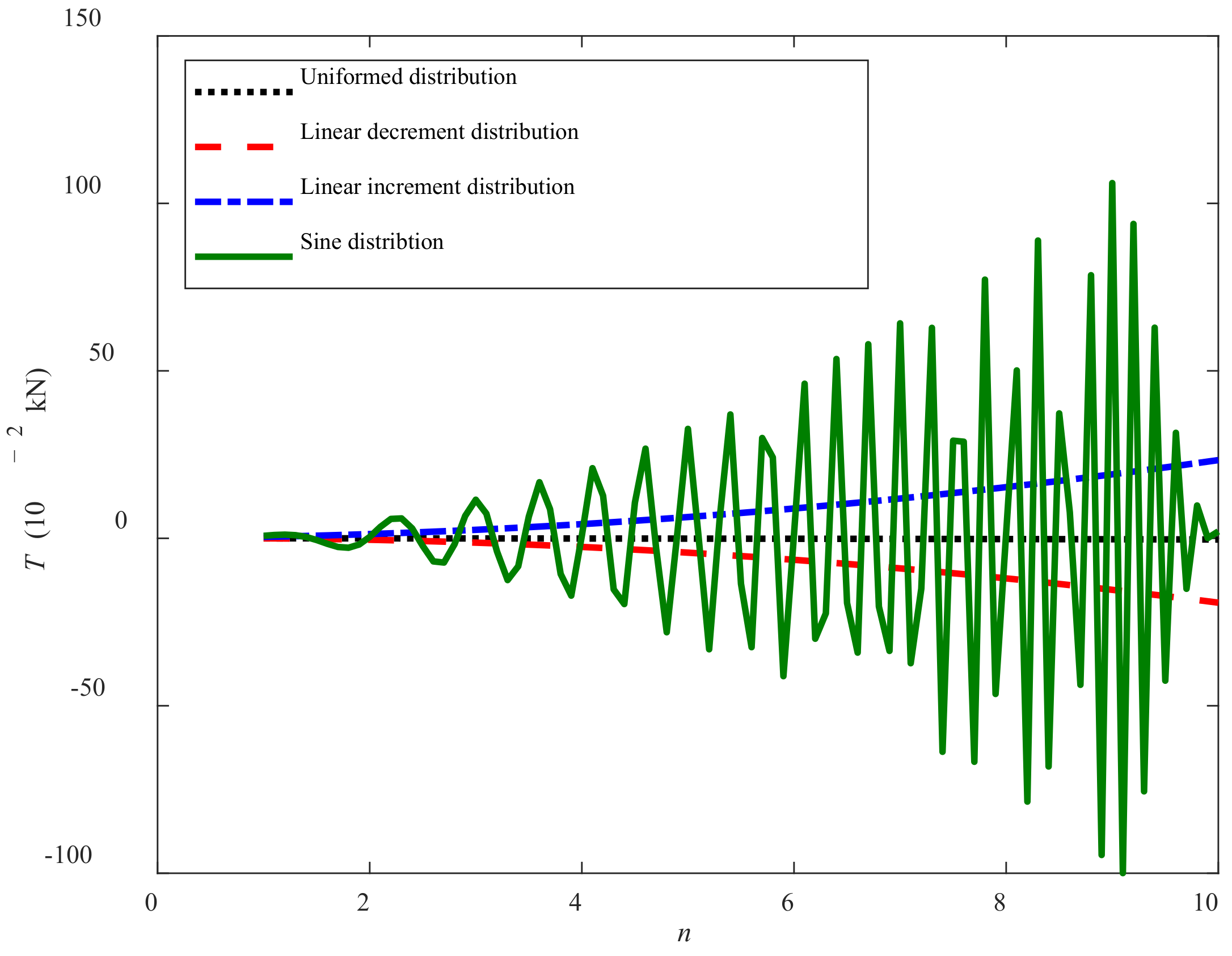
4.2.2. Traction Force (T)- Number of Track Shoe (n) Relationships
5. Conclusions
- (1)
- A semi-empirical time-dependent shear strength (cohesion force) of describing the shear strength can be obtained by letting the compressive stress be zero in direct shear rheological constitutive model based on the analysis of Mohr–Coulomb shear strength theory and direct shear rheological experiment. Several time-dependent traction force models under the different grounding pressure distributions are deduced with the time-dependent cohesion force based on the work-energy principle. The models take the time, grounding pressure, and track shoe number into account and is used for conveniently analyzing the influence of kinds of key parameters on traction force of the deep-sea tracked miner.
- (2)
- The traction force model is verified by a comparison between an experimental curve and a theoretical curve of a single-track shoe. By analyzing the influence of time and track shoe number on time-dependent traction force, it is found that Tincrement > Tsine > Tuniformed > Tdecrement when t > 4 s under different grounding pressure distributions. The linear increment grounding pressure distribution is suggested for evaluating the most favorable traction force and the linear decrement grounding pressure distribution for calculating the worst traction force. Both grounding pressure distributions can better help the crawler design and optimization for better trafficability and stability of the deeps-sea tracked miner when adopting the time-dependent cohesion force.
- (3)
- The traction force calculation is proved to be valid by the traction force experiment of a single-track shoe, and the influence of time, number of the track shoe, and grounding pressure distribution on the traction force can provide scientific basis for designing the crawler and evaluating the trafficability of tracked miner.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jian, Q. Introduction on ocean mining technology of China. Min. Technol. 2001, 1, 9–11. [Google Scholar]
- Chen, J.W.; Cao, C.; Ge, Y.Q.; Zhu, H.; Xu, C.; Sheng, Y.; Tian, L.; Zhang, H. Experimental research on data synchronous acquisition method of subsidence monitoring in submarine gas hydrate mining area. Sensors 2019, 19, 4319. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Okamoto, N. Deep-Sea mineral potential in the south pacific region. J. MMIJ 2015, 131, 597–601. [Google Scholar] [CrossRef]
- Liu, S.J.; Liu, C.; Dai, Y. Status and progress on researches and developments of deep ocean mining equipments. J. Mech. Eng. 2014, 50, 8–18. [Google Scholar] [CrossRef]
- Filho, W.L.; Abubakar, I.R.; Nunes, C.; Platje, J.; Ozuyar, P.G.; Will, M.; Nagy, G.J.; Al-Amin, A.Q.; Hunt, J.D.; Li, C. Deep seabed mining: A note on some potentials and risks to the sustainable mineral extraction from the oceans. J. Mar. Sci. Eng. 2021, 9, 521. [Google Scholar] [CrossRef]
- Deng, L.; Hu, Q.; Chen, J.; Kang, Y.; Liu, S. Particle distribution and motion in six-stage centrifugal pump by means of slurry experiment and CFD-DEM simulation. J. Mar. Sci. Eng. 2021, 9, 716. [Google Scholar] [CrossRef]
- Xu, F.; Rao, Q.H.; Zhang, J.; Ma, W. Compression -shear coupling rheological constitutive model of the deep -sea sediment. Mar. Georesour. Geotechnol. 2018, 36, 288–296. [Google Scholar] [CrossRef]
- Dai, Y.; Liu, H.; Zhang, T.; Liu, S.J. Research on traction trafficability of seafloor tracked mining vehicle. China Sci. Pap. 2015, 10, 1203–1208. [Google Scholar]
- Ma, W.B.; Rao, Q.H.; Li, P.; Guo, S.C.; Feng, K. Shear creep parameters of simulative soil for deep-sea sediment. J. Cent. South Univ. 2014, 21, 4682–4689. [Google Scholar] [CrossRef]
- Ma, W.B.; Rao, Q.H.; Feng, K.; Xu, F. Experimental study on tri-axial compressive creep model of simulative soil for deep-sea sediment. J. Cent. South Univ. 2014, 12, 4342–4347. [Google Scholar]
- Evans, I. The sinkage of tracked vehicles on soft ground. J. Terramech. 1964, 1, 33–43. [Google Scholar] [CrossRef]
- Mizukami, N.; Ishigami, G.; Yoshimitsu, T.; Kubota, T. Evaluation of the shear deformation model in the process of wheel sinking by the wheel experiment. Trans. JSME 2015, 81, 14-00514. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Xu, F.; Rao, Q.H.; Ma, W.B. Track shoe structure optimization of deep-sea mining vehicle based on new rheological calculation formulae of sediment. Mech. Based Des. Struct. 2019, 47, 479–496. [Google Scholar] [CrossRef]
- Zhao, J.F.; Wang, W.S.; Zhong, X.; Su, X. Improvement and verification of pressure-sinkage model in homogeneous soil. Trans. Chin. Soc. Agric. Eng. 2016, 32, 60–66. [Google Scholar]
- Wu, H.Y.; Chen, X.M.; Liu, S.J. Influence of soft sediment adhered to track on adhesion performance of Seabed track vehicle. Trans. Chin. Soc. Agric. Eng. 2010, 26, 6–17. [Google Scholar]
- Wang, M.; Wu, C.; Ge, T.; Gu, Z.M.; Sun, Y.H. Modeling, calibration and validation of tractive performance for seafloor tracked trencher. J. Terramech. 2016, 66, 13–25. [Google Scholar] [CrossRef]
- Xu, F.; Rao, Q.H.; Ma, W.B. Turning traction force of tracked mining vehicle based on rheological property of deep-sea sediment. Trans. Nonferr. Met. Soc. China 2017, 28, 1233–1240. [Google Scholar] [CrossRef]
- Li, J.W.; Yin, B.L.; Chen, B.Z. Study on reducing sediment adhesion of the tracks in deep-sea mining vehicle by submerged water jet. Min. Res. Dev. 2020, 40, 128–133. [Google Scholar]
- Xu, F.; Rao, Q.H.; Ma, W.B. Predicting the sinkage of a moving tracked mining vehicle using a new rheological formulation for soft deep-sea sediment. J. Oceanol. Limnol. 2018, 2, 230–237. [Google Scholar] [CrossRef]
- Shin, G.B.; Baek, S.H.; Park, K.H.; Chung, C.K. Investigation of the soil thrust interference effect for tracked unmanned ground vehicles (UGVs) using model track tests. J. Terramech. 2020, 91, 117–127. [Google Scholar] [CrossRef]
- Baek, S.H.; Shin, G.B.; Lee, S.H.; Yoo, M.; Chung, C.-K. Evaluation of the slip sinkage and its effect on the compaction resistance of an off-road tracked vehicle. Appl. Sci. 2020, 10, 3175. [Google Scholar] [CrossRef]
- Rubinstein, D.; Hitron, R. A detailed multi-body model for dynamic simulation of off-road tracked vehicles. J. Terramech. 2004, 41, 163–173. [Google Scholar] [CrossRef]
- Yang, C.B.; Gu, L.; Li, Q. Finite element simulation of track shoe and ground adhesion. Appl. Mech. Mater. 2014, 644–650, 402–405. [Google Scholar] [CrossRef]
- Li, J.; Bieerdebierke, W.Z.; Jin, S.C. Establishment of interval type track-terrain interaction model and experimental validation. J. Acad. Armored Force Eng. 2016, 30, 42–48. [Google Scholar]
- Xu, F.; Rao, Q.H.; Liu, Z.L.; Ma, W.B. Traction force calculation method for mining vehicle based on rheological performance of deep-sea sediment and grounding pressure of crawler. Chin. J. Nonferr. Met. 2021, 31, 2817–2828. [Google Scholar]
- Muro, T.; O’Brien, J. Terramechanics: Land Locomotion Mechanics, 1st ed.; Taylor & Francis: New York, NY, USA, 2004; p. 1. [Google Scholar]
- Ma, W.B.; Rao, Q.H.; Xu, F. Experimental research on grouser traction of deep-sea mining machine. Appl. Math. Mech.-Engl. 2015, 36, 1243–1252. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical and Mechanical Parameters | Simulant Sediment | Undisturbed Sediment |
|---|---|---|
| Wet density, ρ/(t·m−3) | 1.315 | 1.250 |
| Water content, w/% | 165.6 | 246.5 |
| Liquid limit, wL/% | 190.2 | 145.2 |
| Cohesion force, c/(kPa) | 6.2 | 6.0 |
| Friction angle, φ/(°) | 1.72 | 3.1 |
| Penetration resistance, Ps/(kPa) | 87 | 50–90 |
| σ/kPa | R-Square | ||||
|---|---|---|---|---|---|
| 5 | 7.36 | 1.82 | 7.38 | 22.90 | 0.987 |
| 10 | 10.27 | 2.25 | 10.24 | 27.50 | 0.992 |
| 15 | 11.20 | 2.95 | 11.26 | 24.73 | 0.984 |
| 20 | 11.22 | 5.51 | 11.41 | 304.04 | 0.995 |
| 25 | 13.29 | 8.09 | 13.90 | 421.70 | 0.984 |
| 30 | 19.24 | 9.87 | 19.15 | 466.84 | 0.983 |
| Length L (m) | Width B (m) | Weight G (kN) |
|---|---|---|
| 6 | 1.7 | 110 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, W.; Xu, F. Semi-Empirical Time-Dependent Parameter of Shear Strength for Traction Force between Deep-Sea Sediment and Tracked Miner. Sensors 2022, 22, 1119. https://doi.org/10.3390/s22031119
Yi W, Xu F. Semi-Empirical Time-Dependent Parameter of Shear Strength for Traction Force between Deep-Sea Sediment and Tracked Miner. Sensors. 2022; 22(3):1119. https://doi.org/10.3390/s22031119
Chicago/Turabian StyleYi, Wei, and Feng Xu. 2022. "Semi-Empirical Time-Dependent Parameter of Shear Strength for Traction Force between Deep-Sea Sediment and Tracked Miner" Sensors 22, no. 3: 1119. https://doi.org/10.3390/s22031119
APA StyleYi, W., & Xu, F. (2022). Semi-Empirical Time-Dependent Parameter of Shear Strength for Traction Force between Deep-Sea Sediment and Tracked Miner. Sensors, 22(3), 1119. https://doi.org/10.3390/s22031119