
Fiber Bragg Grating Sensors for Reinforcing Bar Slippage Detection and Bond-Slip Gradient Characterization

 ,
,  ,
,  ,
,  ,
,  ,
,  ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
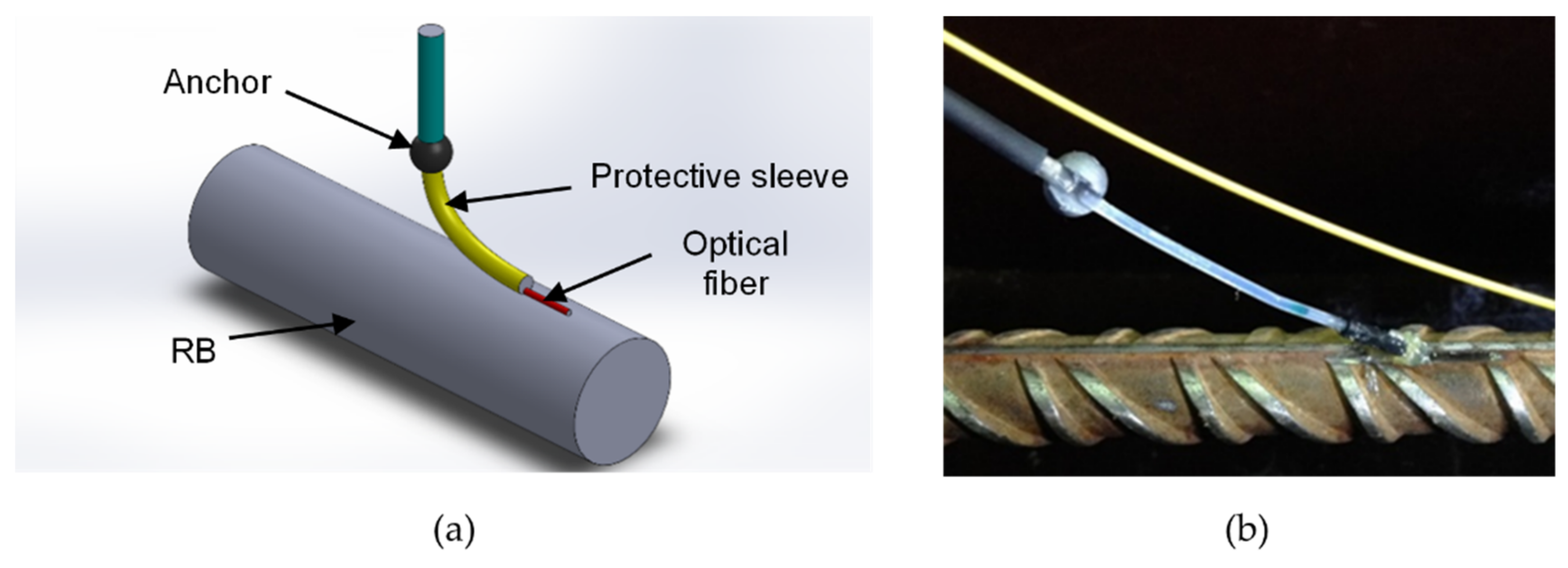
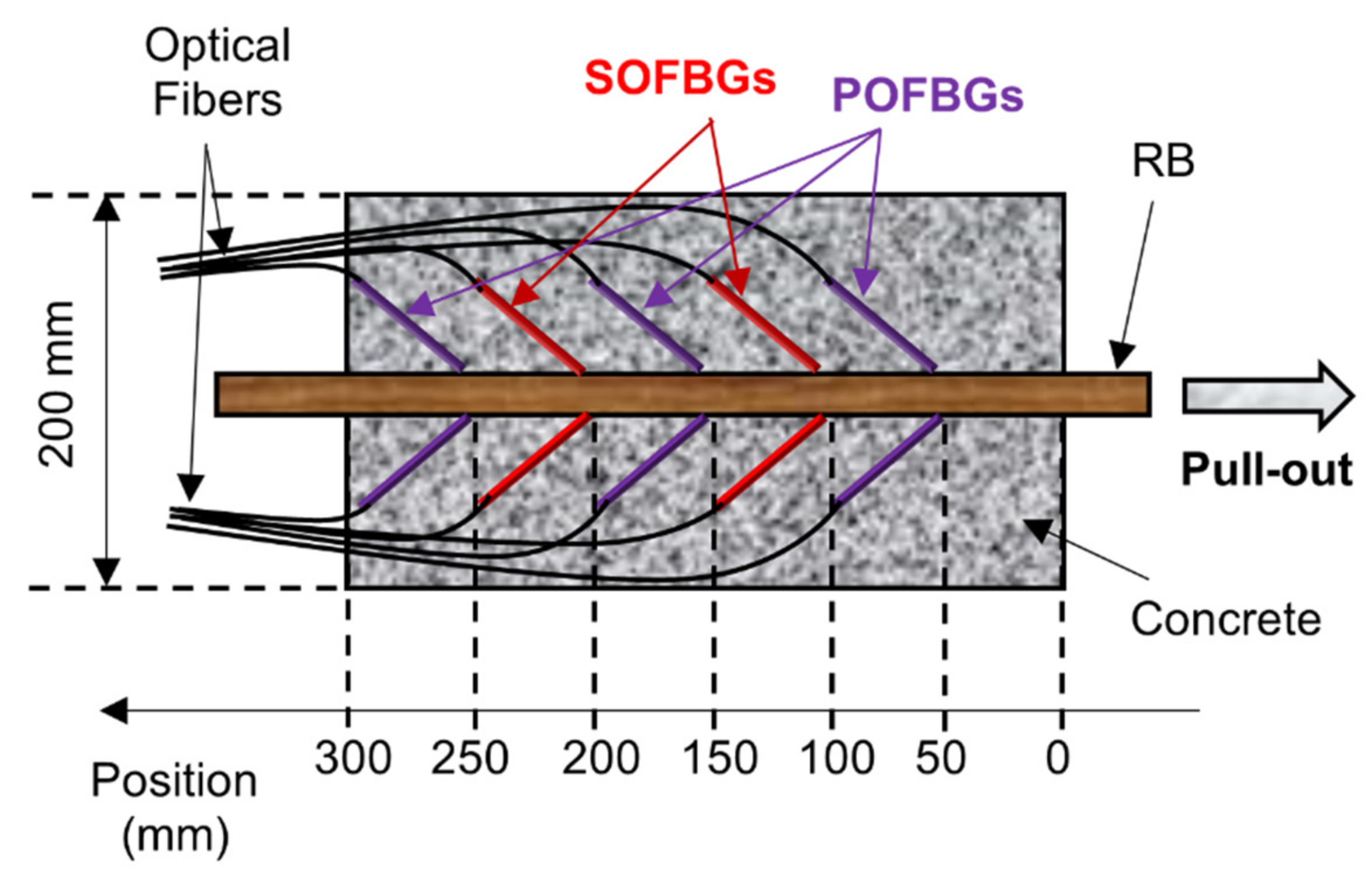
2.1. Sensor Description and Manufacturing
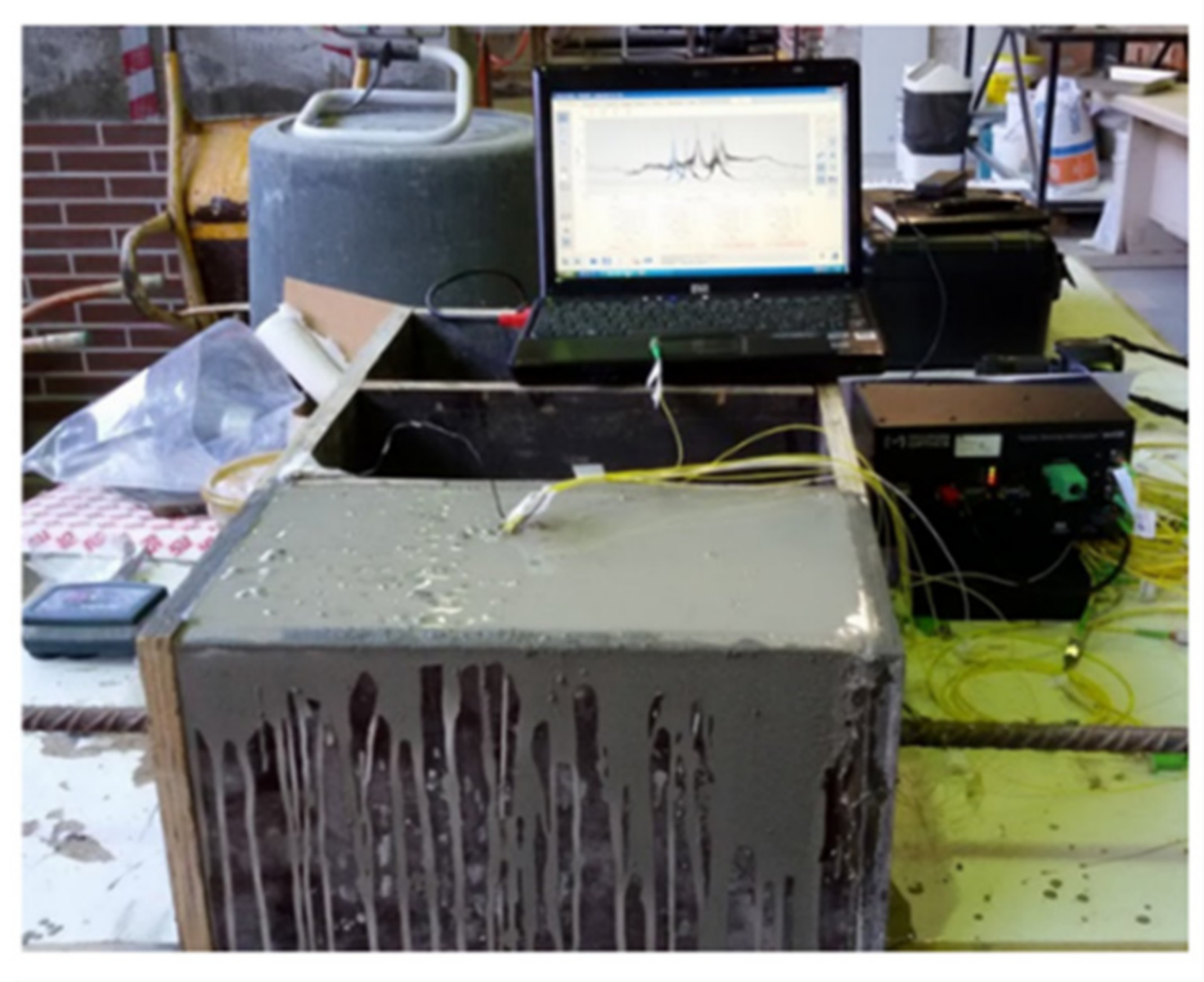
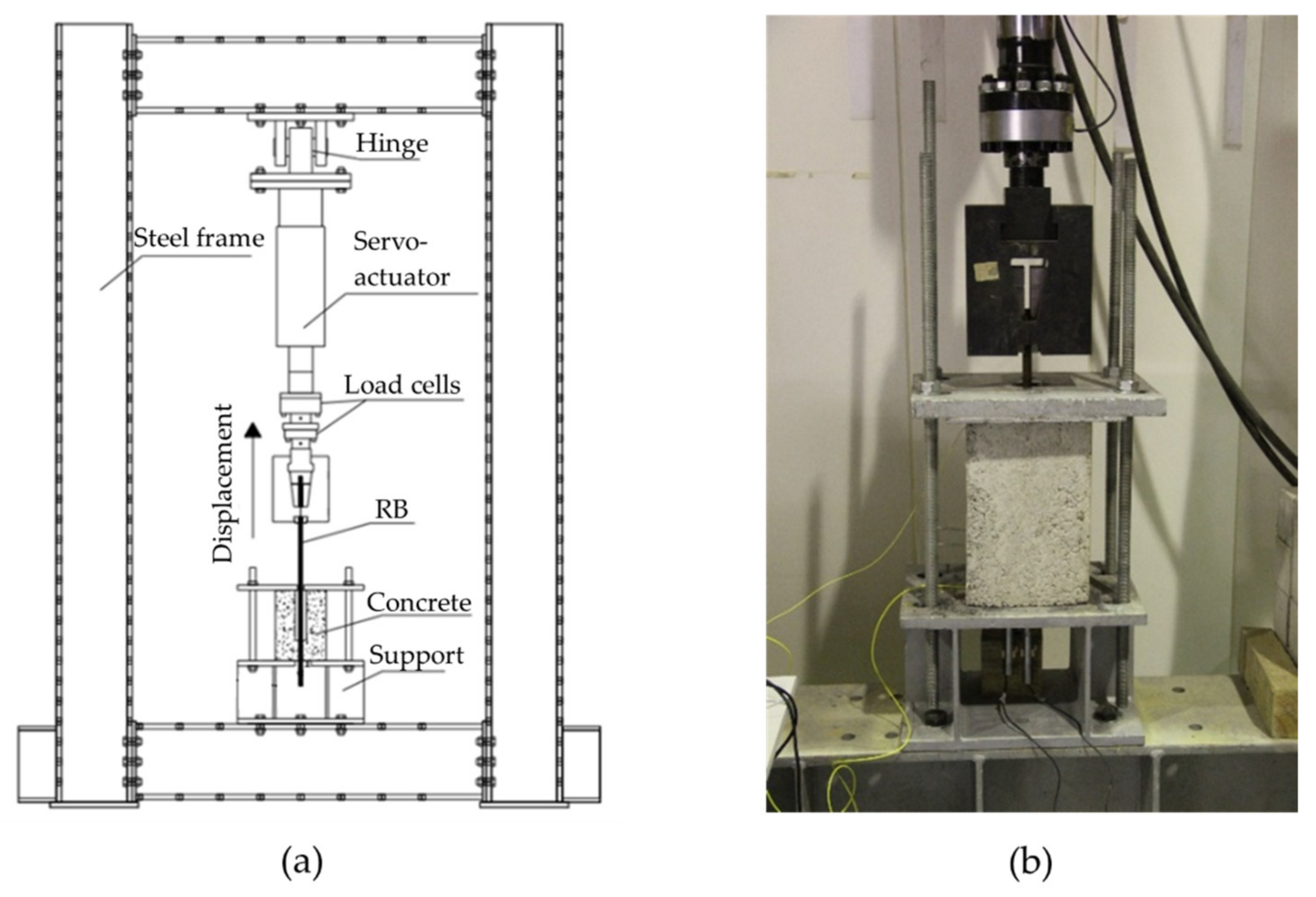
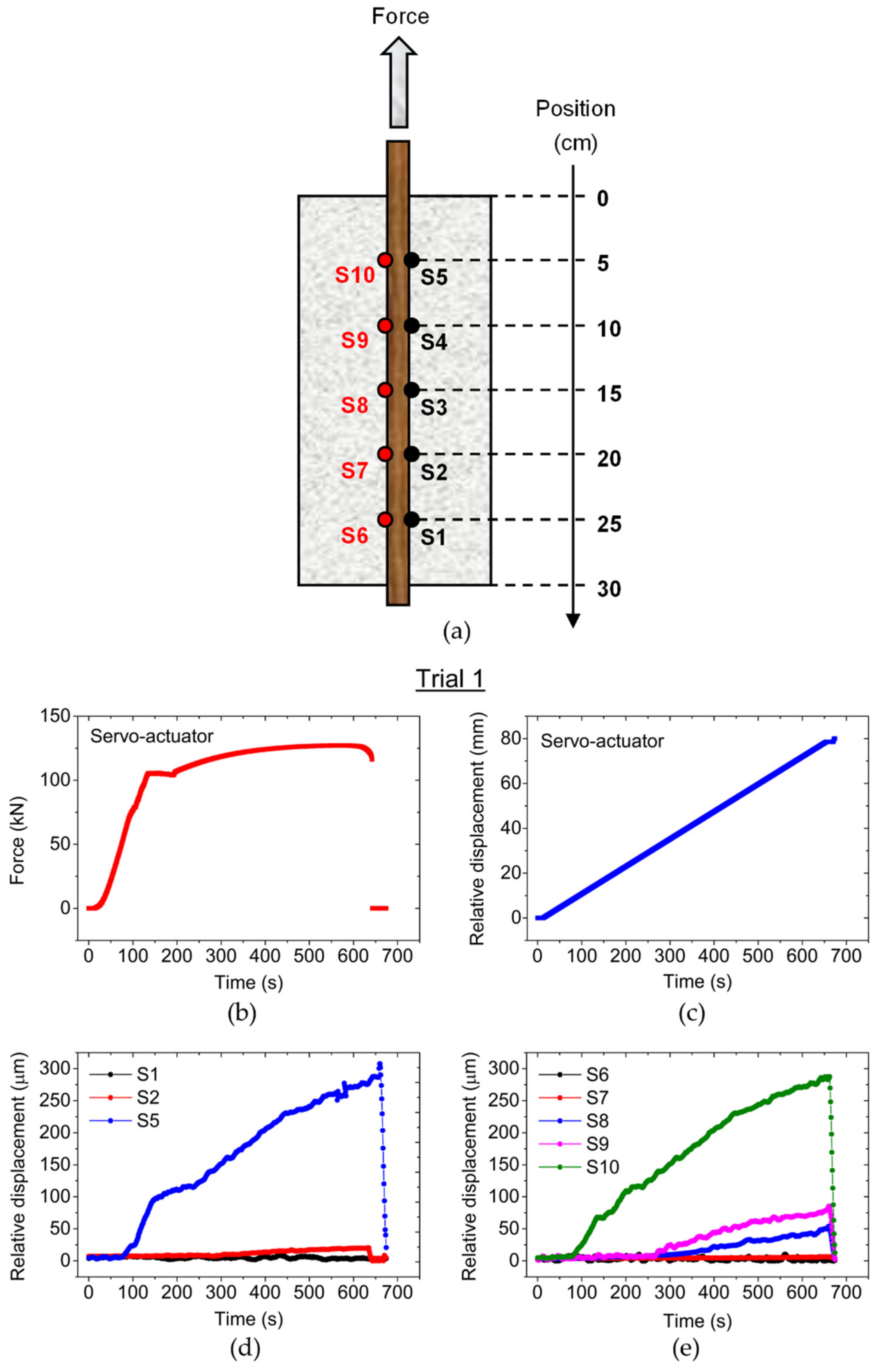
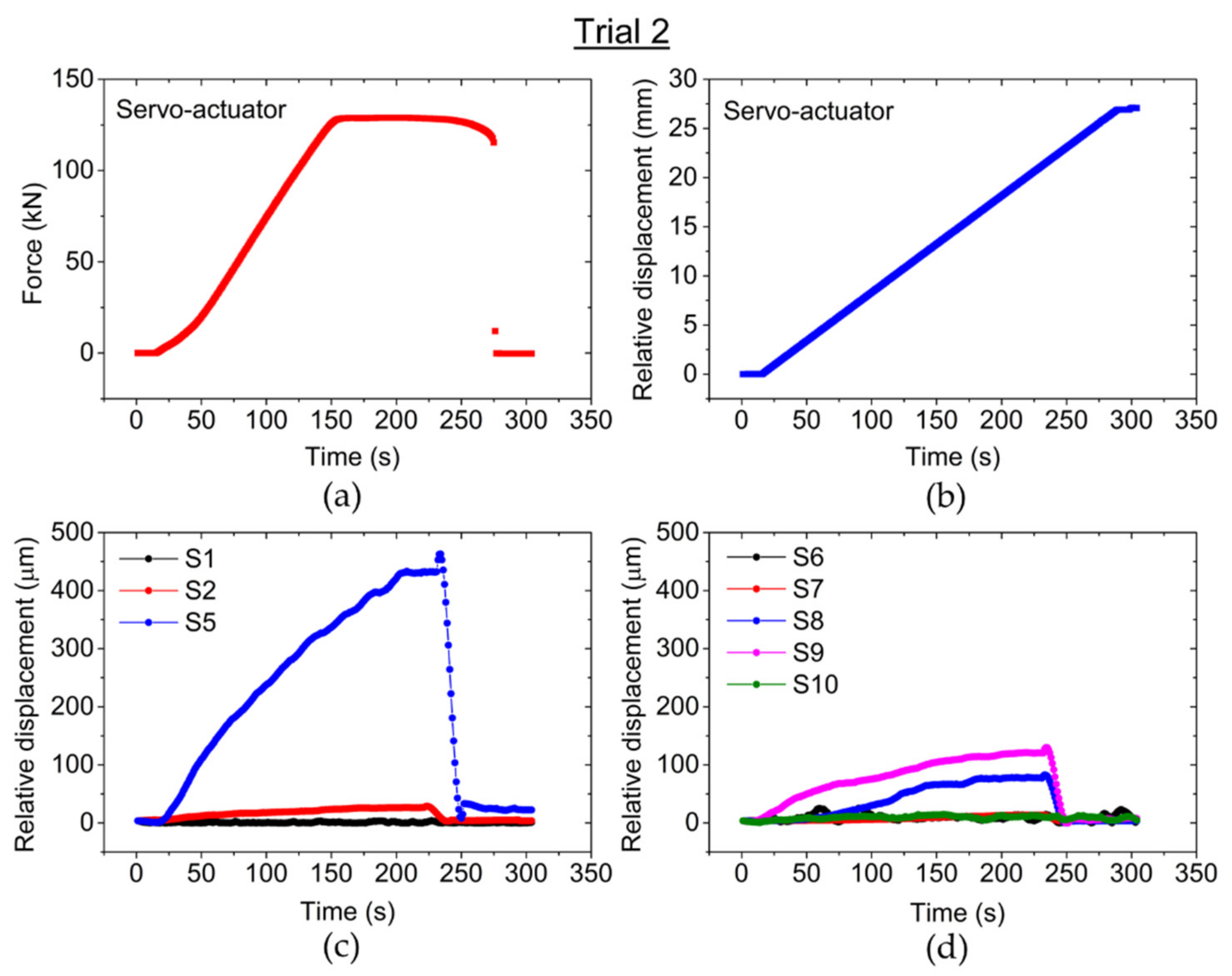
2.2. Description of the Experimental Setup
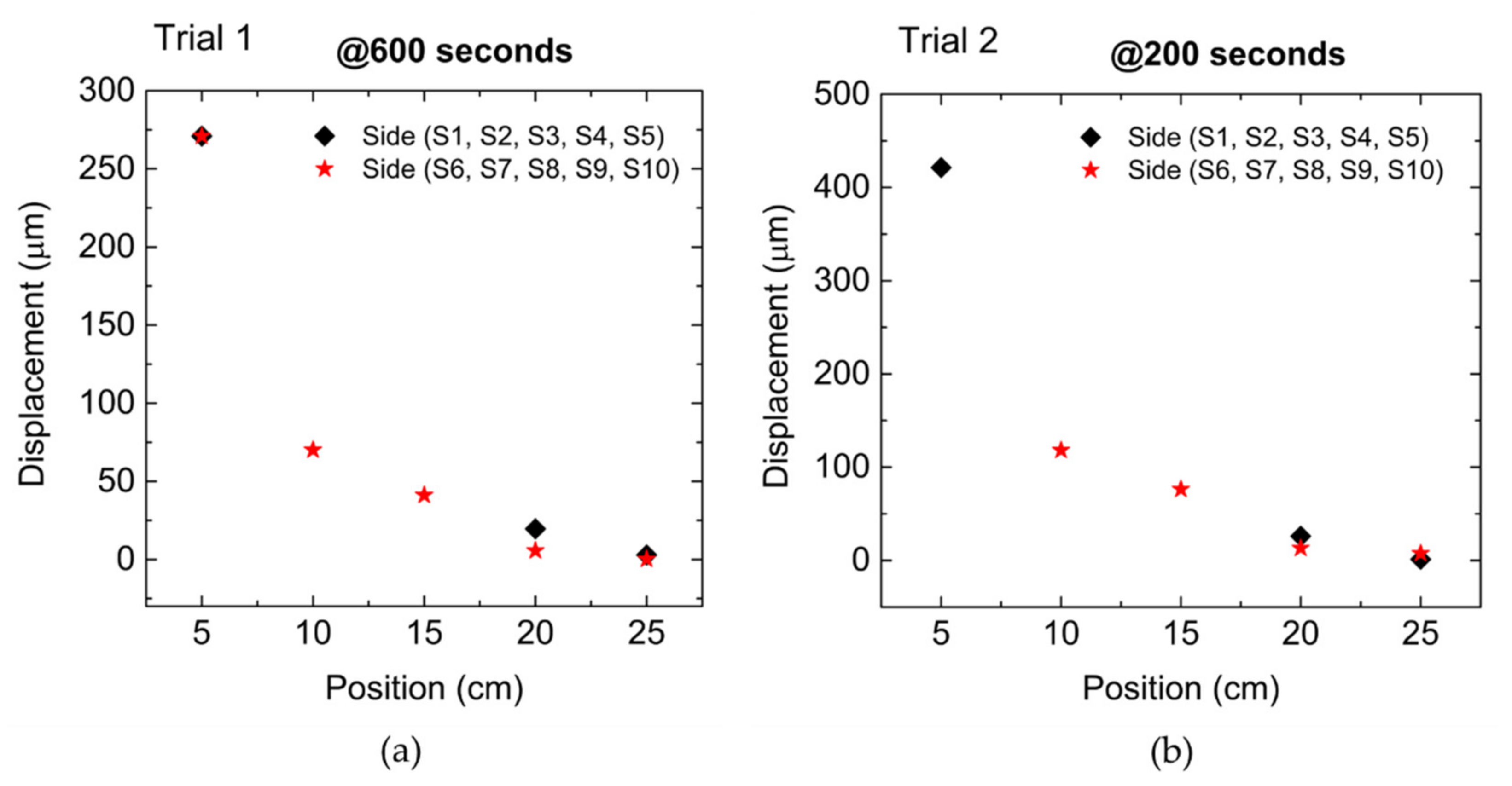
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shen, D.; Shi, X.; Zhang, H.; Duan, X.; Jiang, G. Experimental study of early-age bond behavior between high strength concrete and steel bars using a pull-out test. Constr. Build. Mater. 2016, 113, 653–663. [Google Scholar] [CrossRef]
- CEB. RC Elements under Cyclic Loading: State-of-the-Art Report; Thomas Telford Ltd.: London, UK, 1996. [Google Scholar]
- Torre-Casanova, A.; Jason, L.; Davenne, L.; Pinelli, X. Confinement effects on the steel–concrete bond strength and pull-out failure. Eng. Fract. Mech. 2013, 97, 92–104. [Google Scholar] [CrossRef]
- Essais portant sur l’adherénce es armatures du béton—Essai par traction. Mater. Constr. 1970, 3, 175–178. [CrossRef]
- Silva, B.V.; Barbosa, M.P.; Filho, L.C.P.S.; Lorrain, M.S. Experimental investigation on the use of steel-concrete bond tests for estimating axial compressive strength of concrete: Part 1. Rev. Ibracon Estrut. Mater. 2013, 6, 715–725. [Google Scholar] [CrossRef]
- Melo, J.; Rossetto, T.; Varum, H. Experimental study of bond–slip in RC structural elements with plain bars. Mater. Struct. 2015, 48, 2367–2381. [Google Scholar] [CrossRef]
- Ansari, F. State-of-the art in the Applications of Fiber-optic Sensors to Cementitious Composites. Cem. Concr. Compos. 1997, 19, 3–19. [Google Scholar] [CrossRef]
- Davis, M.A.; Bellemore, D.G.; Kersey, A.D. Distributed Fiber Bragg Grating Strain Sensing in Reinforced Concrete Structural Components. Cem. Concr. Compos. 1997, 19, 45–57. [Google Scholar] [CrossRef]
- Kenel, A.; Nellen, P.; Frank, A.; Marti, P. Reinforcing Steel Strains Measured by Bragg Gratings Sensors. J. Mater. Civ. Eng. 2005, 17, 423–431. [Google Scholar] [CrossRef]
- Wang, B.; Teng, J.G.; Lorenzis, L.D.; Zhou, L.-M.; Ou, J.; Jin, W.; Lau, K.T. Strain monitoring of RC members strengthened with smart NSM FRP bars. Constr. Build. Mater. 2009, 23, 1698–1711. [Google Scholar] [CrossRef]
- Ho, S.C.M.; Ren, L.; Labib, E.; Kapadia, A.; Mo, Y.-L.; Li, H.; Song, G. Inference of bond slip in prestressed tendons in concrete bridge girders. Struct. Control Health Monit. 2014, 22, 289–300. [Google Scholar] [CrossRef]
- Mesquita, E.; Pereira, L.; Theodosiou, A.; Alberto, N.; Melo, J.; Marques, C.; Kalli, K.; André, P.; Varum, H.; Antunes, P. Optical sensors for bond-slip characterization and monitoring of RC structures. Sens. Actuators A Phys. 2018, 280, 332–339. [Google Scholar] [CrossRef]
- Jayawickrema, U.M.N.; Epaarachchi, J.A.; Hettiarachchi, N.K.; Jeewantha, L.H.J.; Herath, H.M.C.M. Monitoring Structural Performances of Concrete Beams Using Fibre Bragg Gratings (FBG) Sensors. In Proceedings of the 10th International Conference on Structural Engineering and Construction Management, Kandy, Sri Lanka, 12–14 December 2019. [Google Scholar]
- Čápová, K.; Velebil, L.; Včelák, J. Laboratory and in-situ testing of intergrated FBG sensors for SHM for concrete and timber structures. Sensors 2020, 20, 1661. [Google Scholar] [CrossRef]
- Kaklauskas, G.; Sokolov, A.; Ramanauskas, R.; Jakubovskis, R. Reinforcing strains in reinforcing concrete tensile members recorded by strain gauges and FBG sensors: Experimental and numerical analysis. Sensors 2019, 19, 200. [Google Scholar] [CrossRef]
- Fan, L.; Bao, Y. Review of fiber optic sensors for corrosion monitoring in reinforced concrete. Cem. Concr. Compos. 2021, 120, 104029. [Google Scholar] [CrossRef]
- Mao, J.; Xu, F.; Gao, Q.; Liu, S.; Jin, W.; Xu, Y. A monitoring method based on FBG for concrete corrosion cracking. Sensors 2016, 16, 1093. [Google Scholar] [CrossRef]
- Almubaied, O.; Chai, H.K.; Islam, M.R.; Lim, K.-S.; Tan, C.G. Monitoring Corrosion Process of Reinforced Concrete Structure Using FBG Strain Sensor. IEEE Trans. Instrum. Meas. 2017, 66, 2148–2155. [Google Scholar] [CrossRef]
- Jamal, L.; Ahmad, S.; Qureshi, K.K. Reinforcement corrosion detection by using fiber Bragg grating based sensors. In Proceedings of the Conference on Lasers and Electro-Optics, San Jose, CA, USA, 15–20 May 2022. [Google Scholar]
- Huo, L.; Cheng, H.; Kong, Q.; Chen, X. Bond-Slip Monitoring of Concrete Structures Using Smart Sensors—A Review. Sensors 2019, 19, 1231. [Google Scholar] [CrossRef]
- Peters, K. Polymer optical fiber sensors—A review. Smart Mater. Struct. 2011, 20, 013002. [Google Scholar] [CrossRef]
- Othonos, A. Fiber Bragg gratings. Rev. Sci. Instrum. 1997, 68, 4309–4341. [Google Scholar] [CrossRef]
- Qiu, Y.; Sheng, Y.; Beaulieu, C. Optimal phase mask for fiber Bragg grating fabrication. J. Light. Technol. 1999, 17, 2366–2370. [Google Scholar] [CrossRef][Green Version]
- Liu, H.Y.; Peng, G.D.; Chu, P.L. Polymer fiber Bragg gratings with 28-dB transmission rejection. IEEE Photon. Technol. Lett. 2002, 14, 935–937. [Google Scholar] [CrossRef]
- Ziemann, O.; Krauser, J.; Zamzow, P.E.; Daum, W. POF Handbook: Optical Short Range Transmission Systems, 2nd ed.; Springer: Berlin, Germany, 2008. [Google Scholar]
- Liehr, S. Polymer Optical Fiber Sensors in Structural Health Monitoring. In New Developments in Sensing Technology for Structural Health Monitoring; Mukhopadhyay, S.C., Ed.; Springer: Berlin, Germany, 2011; Volume 96, pp. 297–333. [Google Scholar]
- Min, R.; Ortega, B.; Marques, C. Latest Achievements in Polymer Optical Fiber Gratings: Fabrication and Applications. Photon. 2019, 6, 36. [Google Scholar] [CrossRef]
- Campanella, C.E.; Cuccovillo, A.; Campanella, C.; Yurt, A.; Passaro, V.M.N. Fibre Bragg grating based strain sensors: Review of technology and applications. Sensors 2018, 18, 3115. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.Y.; Liu, H.B.; Peng, G.D. Tensile strain characterization of polymer optical fibre Bragg gratings. Opt. Commun. 2005, 251, 37–43. [Google Scholar] [CrossRef]
- Webb, D.J. Fibre Bragg grating sensors in polymer optical fibres. Meas. Sci. Technol. 2015, 26, 092004. [Google Scholar] [CrossRef]
- European Standard EN 10080; Steel for the Reinforcement of Concrete—Weldable Reinforcing Steel—General. CEN: Brussels, Belgium, 2005.
- NP EN 12390-3; Ensaios do betão Endurecido—Parte 3: Resistência à compressão dos provetes de ensaio. IPQ: Monte de Caparica, Portugal, 2003.
- Alsiwat, J.M.; Saatcioglu, M. Reinforcement Anchorage Slip under Monotonic Loading. J. Struct. Eng. 1992, 118, 2421–2438. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, L.; Mesquita, E.; Alberto, N.; Melo, J.; Marques, C.; Antunes, P.; André, P.S.; Varum, H. Fiber Bragg Grating Sensors for Reinforcing Bar Slippage Detection and Bond-Slip Gradient Characterization. Sensors 2022, 22, 8866. https://doi.org/10.3390/s22228866
Pereira L, Mesquita E, Alberto N, Melo J, Marques C, Antunes P, André PS, Varum H. Fiber Bragg Grating Sensors for Reinforcing Bar Slippage Detection and Bond-Slip Gradient Characterization. Sensors. 2022; 22(22):8866. https://doi.org/10.3390/s22228866
Chicago/Turabian StylePereira, Luis, Esequiel Mesquita, Nélia Alberto, José Melo, Carlos Marques, Paulo Antunes, Paulo S. André, and Humberto Varum. 2022. "Fiber Bragg Grating Sensors for Reinforcing Bar Slippage Detection and Bond-Slip Gradient Characterization" Sensors 22, no. 22: 8866. https://doi.org/10.3390/s22228866
APA StylePereira, L., Mesquita, E., Alberto, N., Melo, J., Marques, C., Antunes, P., André, P. S., & Varum, H. (2022). Fiber Bragg Grating Sensors for Reinforcing Bar Slippage Detection and Bond-Slip Gradient Characterization. Sensors, 22(22), 8866. https://doi.org/10.3390/s22228866