

Robust Synchronization of Ambient Vibration Time Histories Based on Phase Angle Compensations and Kernel Density Function


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
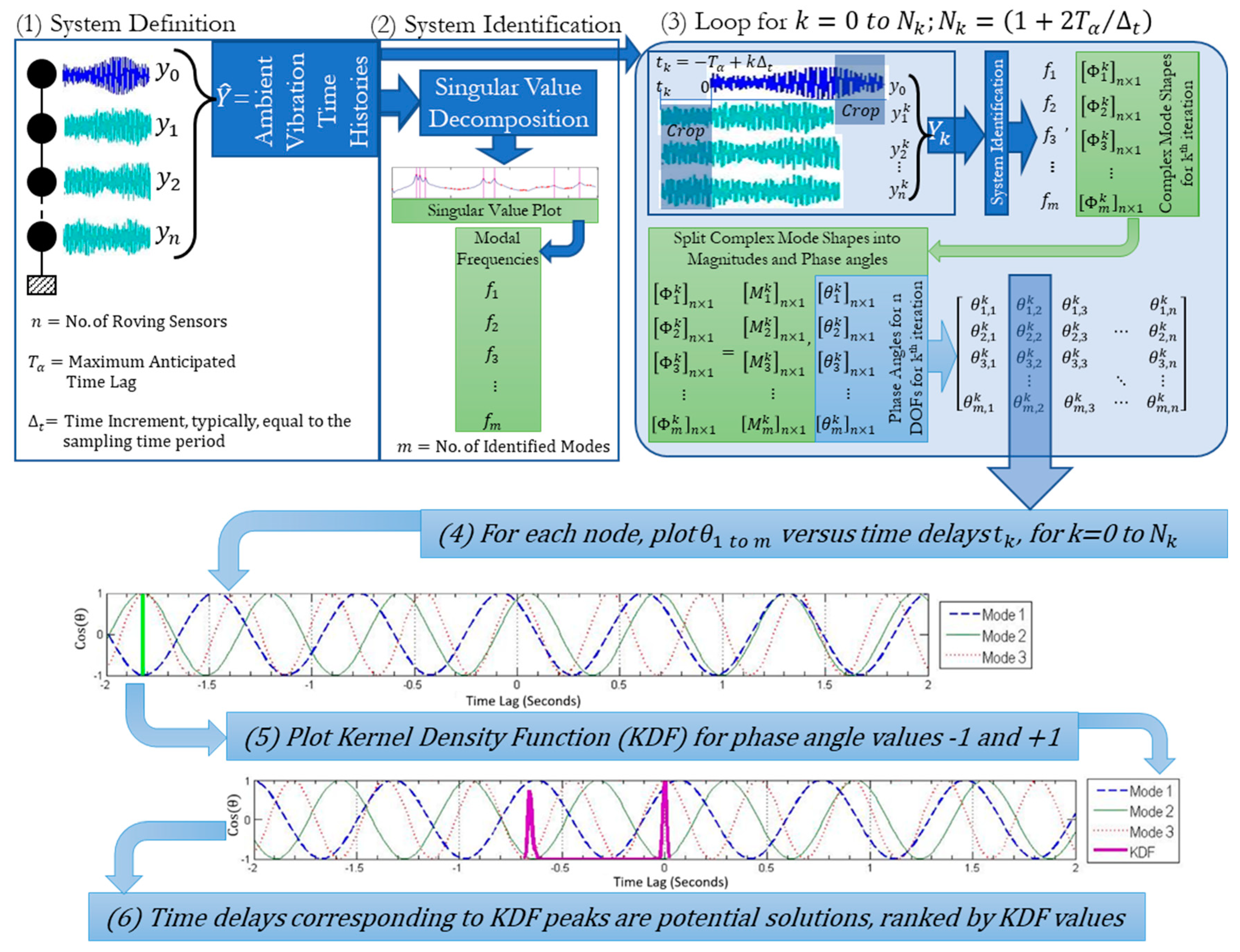
2. Proposed Algorithm
3. Proof of Concept
3.1. Description of the Bridge and Data Collection
3.2. Development and Application of the Proposed Time Synchronization Algorithm
3.3. Results of the Proposed Algorithm
4. Application of the Algorithm to a 30-Story RC Building
4.1. Data Acquisition and Structural Identification
4.2. Application of the Proposed Time Synchronization Algorithm
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Magalhães, F.; Cunha, Á. Explaining operational modal analysis with data from an arch bridge. Mech. Syst. Signal Processing 2011, 25, 1431–1450. [Google Scholar]
- de Magalhães, F.M.R.L. Operational Modal Analysis for Testing and Monitoring of Bridges and Special Structures. Ph.D. Thesis, Universidade do Porto, Porto, Portugal, 2010. [Google Scholar]
- Carvajal, J.C.; Ventura, C.E.; Huffman, S. Ambient vibration testing of multi-span bridges with integral deck-abutments. In Proceedings of the 27th Conference and Exposition on Structural Dynamics (IMAC’09), Orlando, FL, USA, 9–12 February 2009. [Google Scholar]
- Zhang, L.; Brincker, R. An overview of operational modal analysis: Major development and issues. In Proceedings of the 1st International Operational Modal Analysis Conference, Copenhagen, Denmark, 26–27 April 2005; pp. 179–190. [Google Scholar]
- Krishnamurthy, V.; Fowler, K.; Sazonov, E. The effect of time synchronization of wireless sensors on the modal analysis of structures. Smart Mater. Struct. 2008, 17, 055018. [Google Scholar]
- Bocca, M.; Eriksson, L.M.; Mahmood, A.; Jäntti, R.; Kullaa, J. A synchronized wireless sensor network for experimental modal analysis in structural health monitoring. Comput.-Aided Civ. Infrastruct. Eng. 2011, 26, 483–499. [Google Scholar]
- Sim, S.-H.; Spencer, B., Jr.; Zhang, M.; Xie, H. Automated decentralized modal analysis using smart sensors. Struct. Control Health Monit. 2010, 17, 872–894. [Google Scholar]
- Li, J.; Mechitov, K.A.; Kim, R.E.; Spencer, B.F., Jr. Efficient time synchronization for structural health monitoring using wireless smart sensor networks. Struct. Control Health Monit. 2016, 23, 470–486. [Google Scholar]
- Araujo, A.; García-Palacios, J.; Blesa, J.; Tirado, F.; Romero, E.; Samartín, A.; Nieto-Taladriz, O. Wireless measurement system for structural health monitoring with high time-synchronization accuracy. IEEE Trans. Instrum. Meas. 2011, 61, 801–810. [Google Scholar]
- Dare, T. Synchronization in multi-sensor measurements: Importance and methods. In Proceedings of the International Noise, Scottish Event Campus, Glasgow, UK, 21–24 August 2022. [Google Scholar]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441. [Google Scholar]
- Ceriotti, M.; Mottola, L.; Picco, G.P.; Murphy, A.L.; Guna, S.; Corra, M.; Pozzi, M.; Zonta, D.; Zanon, P. Monitoring heritage buildings with wireless sensor networks: The Torre Aquila deployment. In Proceedings of the 2009 International Conference on Information Processing in Sensor Networks, San Francisco, CA, USA, 13–16 April 2009. [Google Scholar]
- Saeed, S. Development of Seismic Vulnerability Maps Using Ambient Vibrations and GIS. Ph.D. Thesis, McGill University, Montreal, QC, Canada, 2013. [Google Scholar]
- Djenouri, D.; Bagaa, M. Synchronization protocols and implementation issues in wireless sensor networks: A review. IEEE Syst. J. 2014, 10, 617–627. [Google Scholar]
- Karthik, S.; Kumar, A.A. Challenges of wireless sensor networks and issues associated with time synchronization. In Proceedings of the UGC Sponsored National Conference on Advanced Networking and Applications, Heidelberg, Germany, 1–4 December 2015. [Google Scholar]
- Sharma, S.; Bansal, R.K.; Bansal, S. Issues and challenges in wireless sensor networks. In Proceedings of the 2013 International Conference on Machine Intelligence and Research Advancement, Katra, India, 21–23 December 2013. [Google Scholar]
- Abdulkarem, M.; Samsudin, K.; Rokhani, F.Z.; A Rasid, M.F. Wireless sensor network for structural health monitoring: A contemporary review of technologies, challenges, and future direction. Struct. Health Monit. 2020, 19, 693–735. [Google Scholar]
- Lasassmeh, S.M.; Conrad, J.M. Time synchronization in wireless sensor networks: A survey. In Proceedings of the IEEE SoutheastCon 2010 (SoutheastCon), Charlotte, NC, USA, 18–21 March 2010. [Google Scholar]
- Elson, J.; Estrin, D. Time synchronization for wireless sensor networks. In Proceedings of the Parallel and Distributed Processing Symposium, International, Washington, DC, USA, 23–27 April 2001; IEEE Computer Society: Washington, DC, USA, 2001. [Google Scholar]
- Elson, J.; Römer, K. Wireless sensor networks: A new regime for time synchronization. ACM SIGCOMM Comput. Commun. Rev. 2003, 33, 149–154. [Google Scholar]
- Chae, M.; Yoo, H.; Kim, J.; Cho, M.-Y. Development of a wireless sensor network system for suspension bridge health monitoring. Autom. Constr. 2012, 21, 237–252. [Google Scholar]
- Rhee, I.-K.; Lee, J.; Kim, J.; Serpedin, E.; Wu, Y.-C. Clock synchronization in wireless sensor networks: An overview. Sensors 2009, 9, 56–85. [Google Scholar]
- Koo, K.Y.; Hester, D.; Kim, S. Time synchronization for wireless sensors using low-cost gps module and arduino. Front. Built Environ. 2019, 4, 82. [Google Scholar] [CrossRef]
- Dragos, K.; Theiler, M.; Magalhães, F.; Moutinho, C.; Smarsly, K. On-board data synchronization in wireless structural health monitoring systems based on phase locking. Struct. Control Health Monit. 2018, 25, e2248. [Google Scholar]
- Yang, X.-M.; Yi, T.-H.; Qu, C.-X.; Li, H.-N. Modal Identification of Bridges Using Asynchronous Responses through an Enhanced Natural Excitation Technique. J. Eng. Mech. 2021, 147, 04021106. [Google Scholar]
- Maes, K.; Van Nimmen, K.; Lourens, E.; Rezayat, A.; Guillaume, P.; De Roeck, G.; Lombaert, G. Verification of joint input-state estimation for force identification by means of in situ measurements on a footbridge. Mech. Syst. Signal Processing 2016, 75, 245–260. [Google Scholar]
- Amador, S.; Magalhaes, F.; Martins, N.; Caetano, E.; Cunha, A. High spatial resolution operational modal analysis of a football stadium suspension roof. In Proceedings of the 5th International Operational Modal Analysis Conference, IOMAC, Guimaraes, Portugal, 13–15 May 2013. [Google Scholar]
- Maes, K.; Reynders, E.; Rezayat, A.; De Roeck, G.; Lombaert, G. Offline synchronization of data acquisition systems using system identification. J. Sound Vib. 2016, 381, 264–272. [Google Scholar]
- Chen, Y.-C. A tutorial on kernel density estimation and recent advances. Biostat. Epidemiol. 2017, 1, 161–187. [Google Scholar]
- Michel, C.; Guéguen, P.; El Arem, S.; Mazars, J.; Kotronis, P. Full-scale dynamic response of an RC building under weak seismic motions using earthquake recordings, ambient vibrations and modelling. Earthq. Eng. Struct. Dyn. 2010, 39, 419–441. [Google Scholar]
- Michel, C.; Guéguen, P.; Bard, P.-Y. Dynamic parameters of structures extracted from ambient vibration measurements: An aid for the seismic vulnerability assessment of existing buildings in moderate seismic hazard regions. Soil Dyn. Earthq. Eng. 2008, 28, 593–604. [Google Scholar]
- Tischer, H. Rapid Seismic Vulnerability Assessment of School Buildings in Québec; McGill University: Montreal, QC, Canada, 2012. [Google Scholar]
- Mugnaini, V.; Fragonara, L.Z.; Civera, M. A machine learning approach for automatic operational modal analysis. Mech. Syst. Signal Processing 2022, 170, 108813. [Google Scholar]
- Bowman, A.W.; Azzalini, A. Applied Smoothing Techniques for Data Analysis: The Kernel Approach with S-Plus Illustrations; OUP Oxford: Oxford, UK, 1997; Volume 18. [Google Scholar]






















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, S.; Chouinard, L.; Sajid, S. Robust Synchronization of Ambient Vibration Time Histories Based on Phase Angle Compensations and Kernel Density Function. Sensors 2022, 22, 8835. https://doi.org/10.3390/s22228835
Saeed S, Chouinard L, Sajid S. Robust Synchronization of Ambient Vibration Time Histories Based on Phase Angle Compensations and Kernel Density Function. Sensors. 2022; 22(22):8835. https://doi.org/10.3390/s22228835
Chicago/Turabian StyleSaeed, Salman, Luc Chouinard, and Sikandar Sajid. 2022. "Robust Synchronization of Ambient Vibration Time Histories Based on Phase Angle Compensations and Kernel Density Function" Sensors 22, no. 22: 8835. https://doi.org/10.3390/s22228835
APA StyleSaeed, S., Chouinard, L., & Sajid, S. (2022). Robust Synchronization of Ambient Vibration Time Histories Based on Phase Angle Compensations and Kernel Density Function. Sensors, 22(22), 8835. https://doi.org/10.3390/s22228835