

An Intelligent Online Drunk Driving Detection System Based on Multi-Sensor Fusion Technology



Abstract
:1. Introduction
2. Research on Sensor Array for Drunk Driving Based on Gas Diffusion Model
3. Model of Data Fusion Algorithm of Drunk Driving Detection with Sensor Array
4. The Development of an Online Intelligent Detection Device for Drunk Driving of Automobile Drivers
4.1. Hardware Design
4.2. Software Design
5. Test and Analysis
5.1. Sensor Array Testing
5.2. Drunk Driving Practice Test
6. Conclusions
- (1)
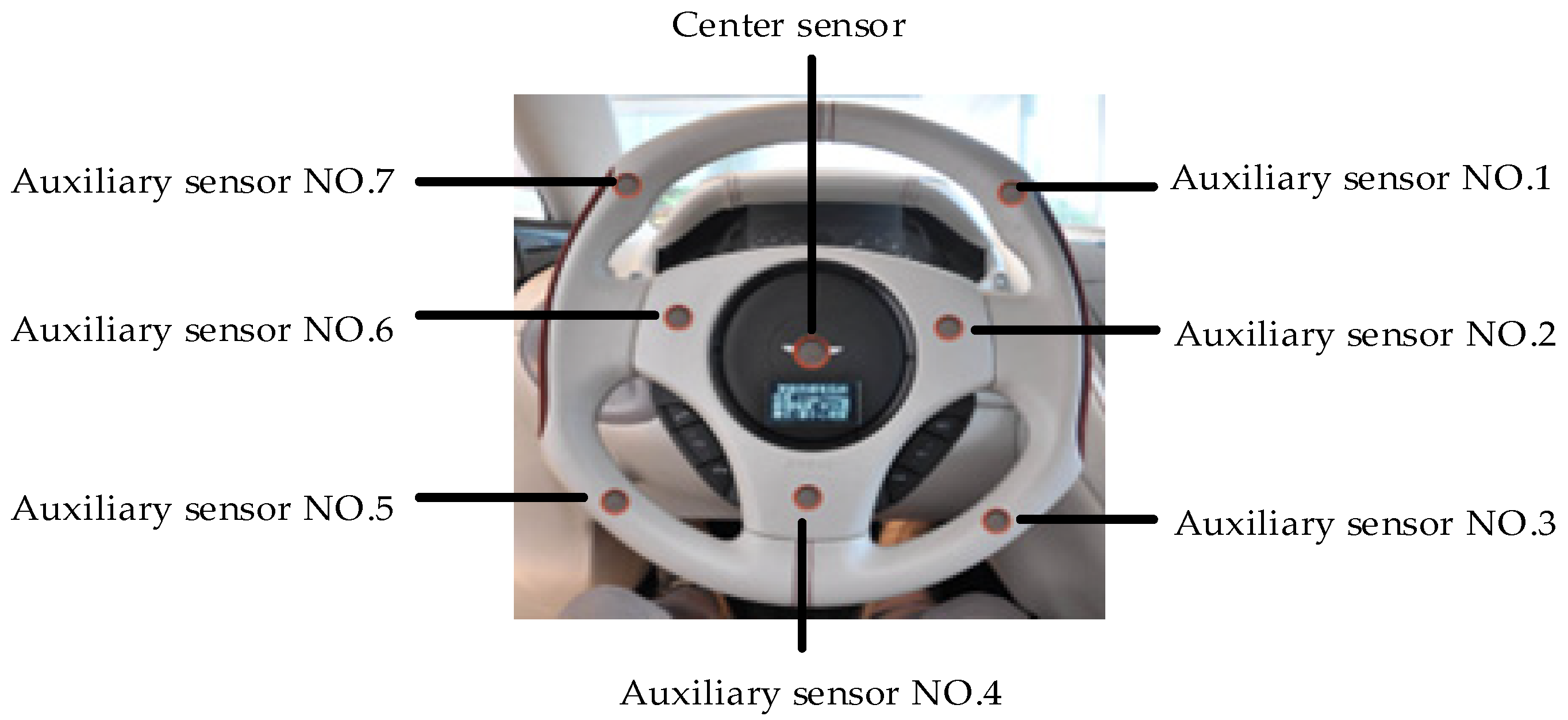
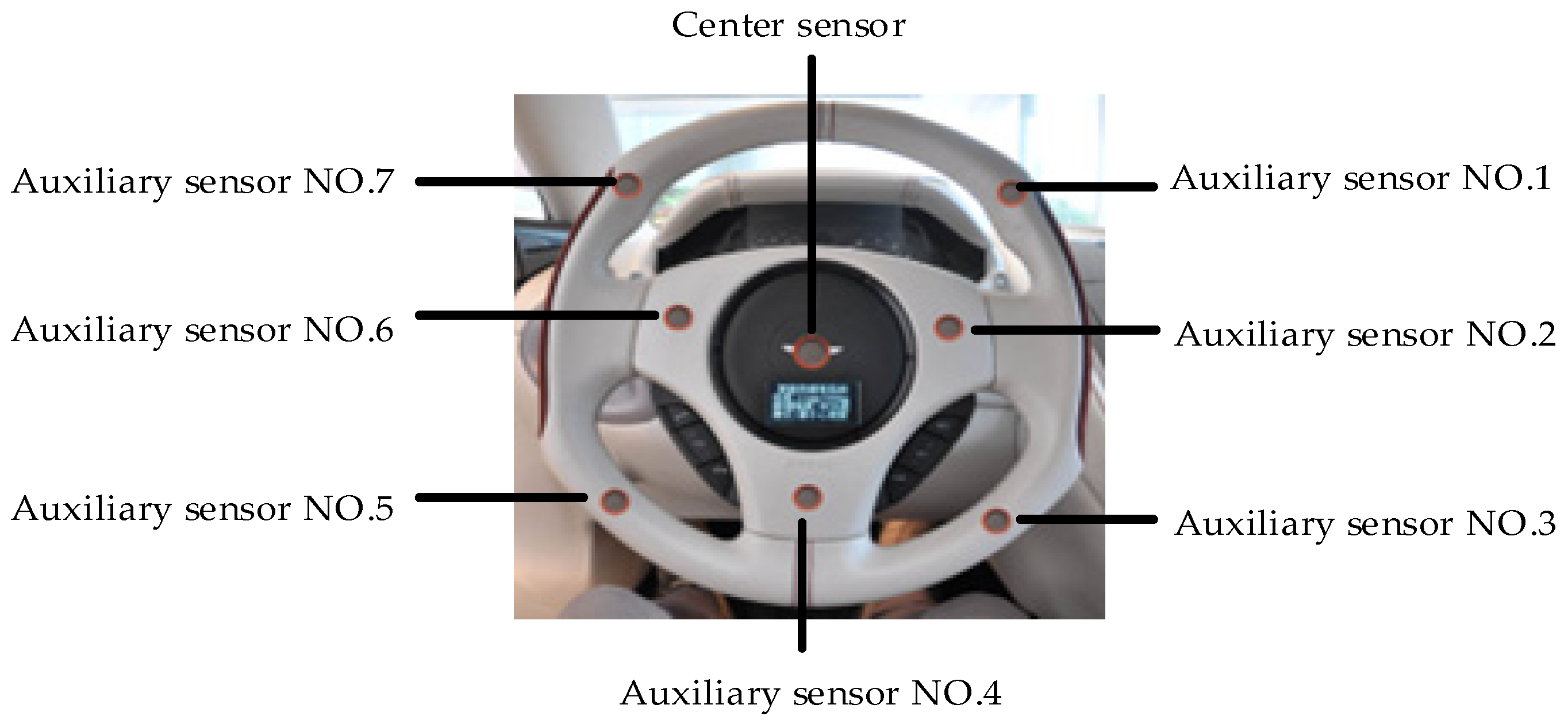
- In order to obtain accurate detection results, the sensor array layout conforming to the drunk driving detection of the driver was studied. According to the gas turbulent diffusion model, the sensor array is located above the steering wheel, with one sensor in the center as the center sensor and the other six as auxiliary sensors;
- (2)
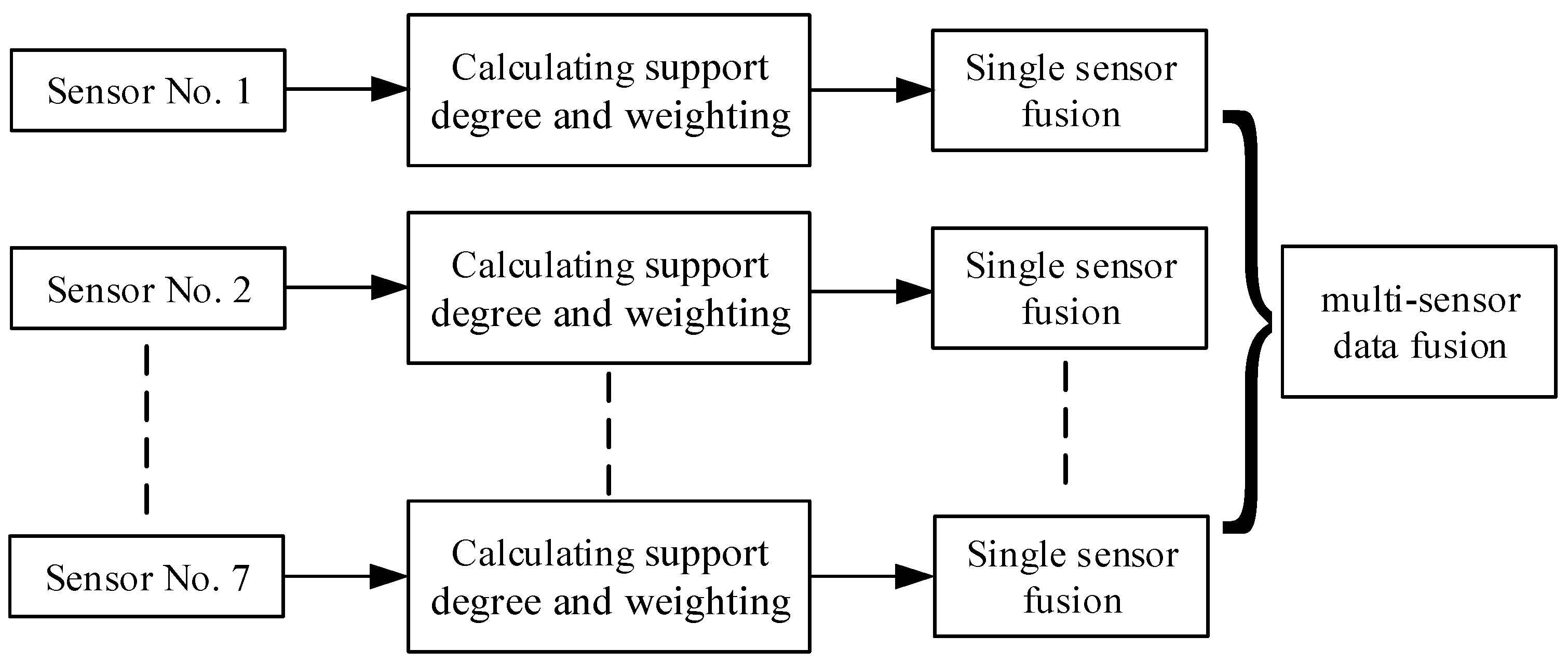
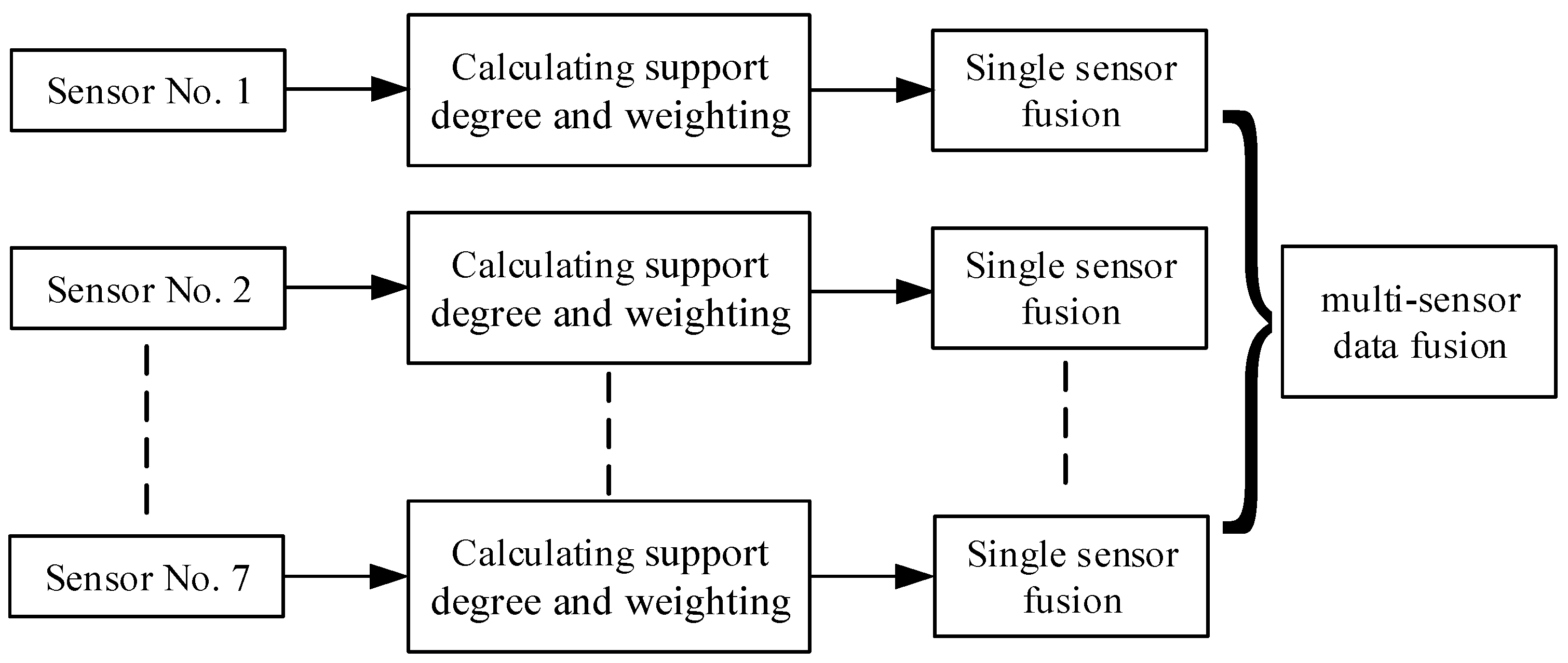
- The multi-sensor data fusion model algorithm for drunk driving detection is proposed. The algorithm model of the multi-sensor data fusion model is divided into two layers. The first layer is assesses the driver driving under the influence of alcohol, so as to prevent misjudgment caused by non-driver drinking in the car. In the second layer, the degree of the alcohol consumption of the driver is detected based on the support matrix and the adaptive weighted fusion algorithm;
- (3)
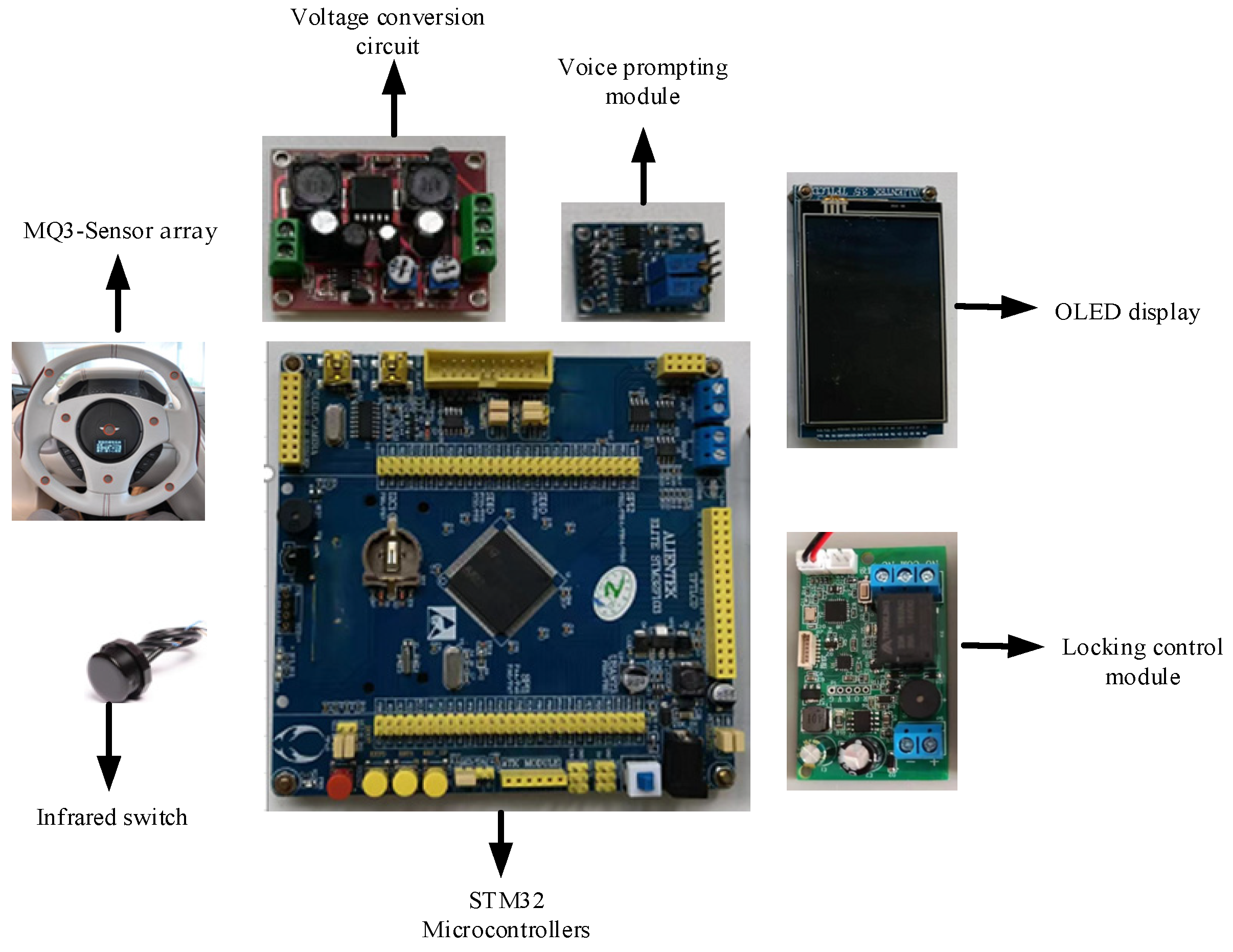
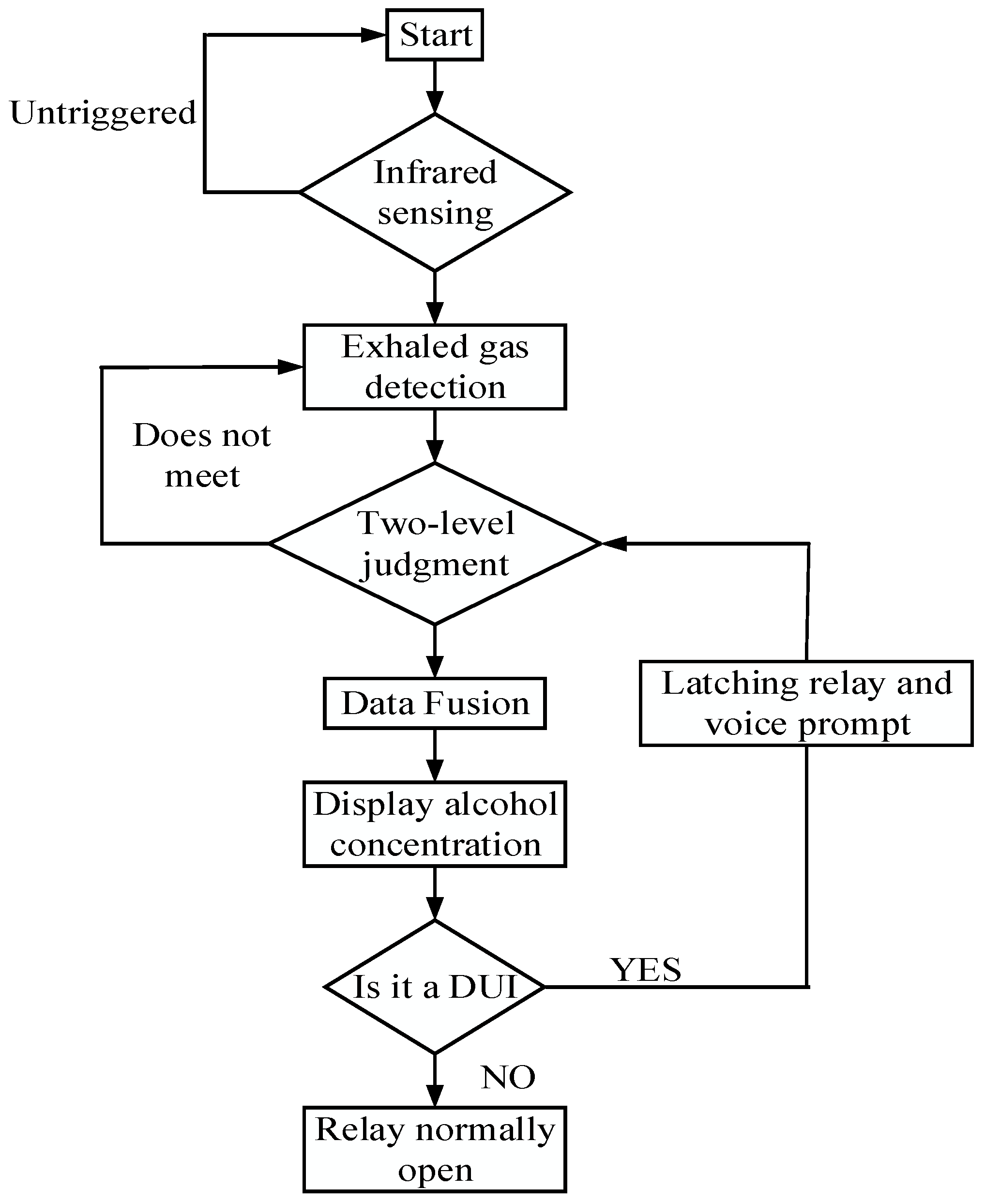
- The real-time online intelligent detection device of drunk driving has been constructed, and device simulation test results show that, based on the support and adaptive weighted sensor array data fusion system, we can improve the veracity and reliability of the intelligent test results of drunken driving. For a few unexpected situations, such as in the case where the drinker is not the driver, the system will shield from this situation and test again immediately. The system will not start until it detects that the driver is sitting in front of the cab, and the low-power standby mode is maintained, which greatly reduces the power consumption of the system;
- (4)
- The experimental results indicate that DUI (driving under the influence) online intelligent detection can accurately determine DUI when the driver has consumed over 50 mL of alcohol and is sitting in the driver’s seat. However, drinking less than 50 mL of alcohol is not accurately detected as DUI, and the algorithm for data fusion will be further refined in the future to increase the accuracy of DUI detection. This paper has not yet considered the driver’s artificially caused DUI judgment errors, such as the use of a mask for testing, concealment of the MQ3 sensor, etc. It would be beneficial in the future to consider the use of multiple types of sensors and multi-information fusion to integrate anti-DUI devices for more accurate DUI judgments.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tefft, B.C. Prevalence of Motor Vehicle Crashes Involving Drowsy Drivers, United States, 2009–2013; Report Prepared for the American Automobile Association (AAA); AAA Foundation for Traffic Safety: Washington, DC, USA, 2014. [Google Scholar]
- Fell, J.C.; Freedman, M. The Relative Frequency of Unsafe Driving Acts in Serious Traffic Crashes; Report DOT-HS-809-206; National Highway Traffic Safety Administration (NHTSA): Washington, DC, USA, 2001.
- The Effects of Blood Alcohol Concentration, National Highway Traffic Safety Administration, Washington, DC, USA. 2022. Available online: https://www.nhtsa.gov/risky-driving/drunk-driving (accessed on 16 June 2022).
- Xiang, L. On the construction of petty offenses system-based on the research into the crime of dangerous driving under the influence of alcohol. Politics Law 2022, 1, 31–50. [Google Scholar]
- Cathelyn, F.; Van Dessel, P.; De Houwer, J. Predicting drunk driving using a variant of the implicit association test. J. Saf. Res. 2022, 81, 134–142. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Xue, M.; Zhang, J.; Ou, R.; Zhang, Q.; Kuang, P. Detect DUI: An in-car detection system for drink driving and BACs. IEEE/ACM Trans. Netw. 2022, 30, 896–910. [Google Scholar] [CrossRef]
- Fergson. Driver alcohol detection dystem for safety. In Proceedings of the Transportation Research Board 88th Annual Meeting, Washington, DC, USA, 11–15 January 2009. [Google Scholar]
- Khalil, A.; Aljanaideh, K.F.; Al Janaideh, M. On Detecting Drunk Drivers in Mixed Autonomous Platoons Using Vehicles Velocity Measurements. IEEE/ASME Trans. Mechatron. 2022, 18, 121–134. [Google Scholar] [CrossRef]
- Yan, K.; David, Z. Sensor evaluation in a breath analysis system. In Proceedings of the International Conference on Medical Biometrics, Shenzhen, China, 30 May–1 June 2014; pp. 35–40. [Google Scholar]
- Ge, L.; Deng, H.; Wang, Q.; Hu, Z.; Li, J. Study of the influence of temperature on the measurement accuracy of transit-time ultrasonic flowmeters. Sens. Rev. 2019, 39, 269–276. [Google Scholar] [CrossRef]
- Ge, L.; He, Y.; Wang, Q.; Hu, Z.; Gan, F.; Wei, G. Research on oil-well tubing damage monitoring of intelligent well based on FSM technology. Insight 2019, 61, 458–464. [Google Scholar] [CrossRef]
- Shifat, T.A.; Hur, J.W. ANN assisted multi sensor information fusion for BLDC motor fault diagnosis. IEEE Access 2021, 9, 9429–9441. [Google Scholar] [CrossRef]
- Zuo, Y.; Cheng, H.; Cheng, T. On-line detection data fusion algorithm of underground mobile equipment based on fractional order partial differential. Chin. J. Sens. Actuators 2021, 34, 237–243. [Google Scholar]
- Liu, X.; Zhou, B.; Huang, P.; Xue, W.; Li, Q.; Zhu, J.; Qiu, L. Kalman filter-based data fusion of Wi-Fi RTT and PDR for indoor localization. IEEE Sens. J. 2021, 21, 8479–8490. [Google Scholar] [CrossRef]
- Qu, G.; Yang, Y.; Wang, G.; Yang, L. Research progress in properties modification of metal oxide semiconductor gas sensors. Transducer Microsyst. Technol. 2022, 41, 1–4. [Google Scholar]
- Ge, L.; Mu, X.; Tian, G.; Huang, Q.; Ahmed, J.; Hu, Z. Current Applications of Gas Sensor Based on 2-D Nanomaterial: A Mini Review. Front. Chem. 2019, 7, 839. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Wang, M. Study on the application of drunk driving detection device design in traffic safety. In Resilience and Sustainable Transportation Systems; American Society of Civil Engineers: Reston, VA, USA, 2020; Volume 34, pp. 134–139. [Google Scholar]
- Celaya-Padilla, J.M.; Romero-González, J.S.; Galvan-Tejada, C.E.; Galvan-Tejada, J.I.; Luna-García, H.; Arceo-Olague, J.G.; Gamboa-Rosales, N.K.; Sifuentes-Gallardo, C.; Martinez-Torteya, A.; De la Rosa, J.I.; et al. In-Vehicle Alcohol Detection Using Low-Cost Sensors and Genetic Algorithms to Aid in the Drinking and Driving Detection. Sensors 2021, 21, 7752. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, R.; Li, J.; Xin, Z. Locating unknown number of multi-point hazardous gas leaks using Principal Component Analysis and a Modified Genetic Algorithm. Atmos. Environ. 2020, 230, 117515. [Google Scholar] [CrossRef]
- Zhen, M.; Muzaffar, H. Intelligent fusion algorithm for multi-sensor information in integrated power grid operation system. J. Intell. Fuzzy Syst. 2018, 35, 4059–4069. [Google Scholar] [CrossRef]
- Shao, S.; Zhang, K. An improved multisensor self-adaptive weighted fusion algorithm based on discrete kalman filtering. Complexity 2020, 2020, 9673764. [Google Scholar] [CrossRef]
- Liang, H.; Bao, W.; Shen, X. Adaptive Weighting Feature Fusion Approach Based on Generative Adversarial Network for Hyperspectral Image Classification. Remote Sens. 2021, 13, 198. [Google Scholar] [CrossRef]
- Zhou, S.; Zhang, J.; Feng, X.; Chen, H. Research on adaptive weighted fusion algorithm based on the improved multi-sensor. Process Autom. Instrum. 2021, 42, 58–62. [Google Scholar]
- Ge, L.; Wang, Z.; Zeng, Q.; Wang, X.; Chen, X.; Liao, J.; Deng, K. Research on the oil life estimation and detection method. J. Balk. Tribol. Assoc. 2015, 21, 897–911. [Google Scholar]
- Hao, H.; Wang, M.; Tang, Y.; Li, Q. Research on data fusion of multi-sensors based on fuzzy preference relations. Neural Comput. Appl. 2019, 31, 337–346. [Google Scholar] [CrossRef]
- Drinking Levels Defined. 2022. Available online: https://www.niaaa.nih.gov/alcohol-health/overview-alcohol-consumption/moderate-binge-drinking (accessed on 2 July 2022).
- Heilmann, B.; El Faouzi, N.-E.; De Mouzon, O.; Hainitz, N.; Koller, H.; Bauer, D.; Antoniou, C. Predicting Motorway Traffic Performance by Data Fusion of Local Sensor Data and Electronic Toll Collection Data. Comput. Civ. Infrastruct. Eng. 2011, 26, 451–463. [Google Scholar] [CrossRef]
- Lee, S.-L.; Chau, G.-Y.; Yao, C.-T.; Wu, C.-W.; Yin, S.-J. Functional Assessment of Human Alcohol Dehydrogenase Family in Ethanol Metabolism: Significance of First-Pass Metabolism. Alcohol. Clin. Exp. Res. 2006, 30, 1132–1142. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position of Drunk Occupants | Car Environment | Detection Position | Diffusion Detection Results |
|---|---|---|---|
| Driving seat | No wind | Center and around the steering wheel | There is the greatest concentration on the steering wheel center and a decreasing concentration around it. |
| Co-pilot seat | No wind | Center and around the steering wheel | The concentration is highest near the right side (the co-pilot side) of the steering wheel and decreases from the center of the steering wheel to the left side of it. |
| Back seat | No wind | Center and around the steering wheel | There is a tendency to have a uniform concentration in the center and around the steering wheel. |
| Level | BAC Value | Level | BAC Value |
|---|---|---|---|
| Level 1 | 20 mg/100 mL | Level 5 | 60 mg/100 mL |
| Level 2 | 30 mg/100 mL | Level 6 | 70 mg/100 mL |
| Level 3 | 40 mg/100 mL | Level 7 | 80 mg/100 mL |
| Level 4 | 50 mg/100 mL |
| Parameter | Height | Weight | Liver Function | Allergic to Alcohol | Have a History of Drinking | |
|---|---|---|---|---|---|---|
| Serial Number | ||||||
| Participant No. 1 | 170 cm | 55 kg | Normal | No | Yes | |
| Participant No. 2 | 176 cm | 68 kg | Normal | No | Yes | |
| Participant No. 3 | 182 cm | 80 kg | Normal | No | Yes | |
| Main Driver Blood Alcohol Concentration | Co-Driver Blood Alcohol Concentration | Identification Results |
|---|---|---|
| <3 mg/100 mL | 21 mg/100 mL | 5 experiments, all blocked. The word “input error” is displayed |
| <3 mg/100 mL | 37 mg/100 mL | 5 experiments, all blocked. The word “input error” is displayed |
| <3 mg/100 mL | 77 mg/100 mL | 5 experiments, all blocked. The the word “input error” is displayed |
| Alcohol Consumption | Time after Drinking | Judgment Results |
|---|---|---|
| 50 mL | 1 h | 0 subjects had more than 20 mg/100 mL of alcohol in their breath. |
| 100 mL | 1 h | Three subjects had more than 20 mg/100 mL of alcohol in their breath. |
| 150 mL | 1 h | All three subjects had more than 20 mg/100 mL of alcohol in their breath, and one of them had more than 80 mg/100 mL. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Luo, Y.; Ge, L.; Zeng, W.; Rao, Z.; Xiao, X. An Intelligent Online Drunk Driving Detection System Based on Multi-Sensor Fusion Technology. Sensors 2022, 22, 8460. https://doi.org/10.3390/s22218460
Liu J, Luo Y, Ge L, Zeng W, Rao Z, Xiao X. An Intelligent Online Drunk Driving Detection System Based on Multi-Sensor Fusion Technology. Sensors. 2022; 22(21):8460. https://doi.org/10.3390/s22218460
Chicago/Turabian StyleLiu, Juan, Yang Luo, Liang Ge, Wen Zeng, Ziyang Rao, and Xiaoting Xiao. 2022. "An Intelligent Online Drunk Driving Detection System Based on Multi-Sensor Fusion Technology" Sensors 22, no. 21: 8460. https://doi.org/10.3390/s22218460
APA StyleLiu, J., Luo, Y., Ge, L., Zeng, W., Rao, Z., & Xiao, X. (2022). An Intelligent Online Drunk Driving Detection System Based on Multi-Sensor Fusion Technology. Sensors, 22(21), 8460. https://doi.org/10.3390/s22218460