
Freeform Wide Field-of-View Spaceborne Imaging Telescope: From Design to Demonstrator
 , , ,
, , ,  , and
, and 
Abstract
1. Introduction
2. Methods: Optical Design
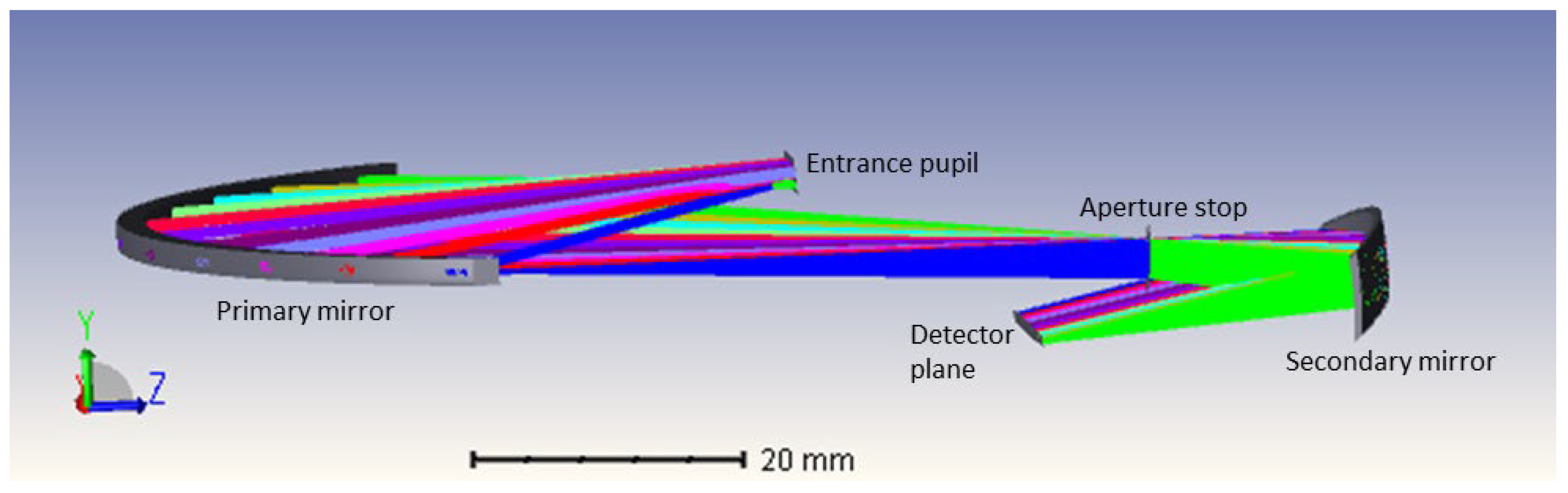
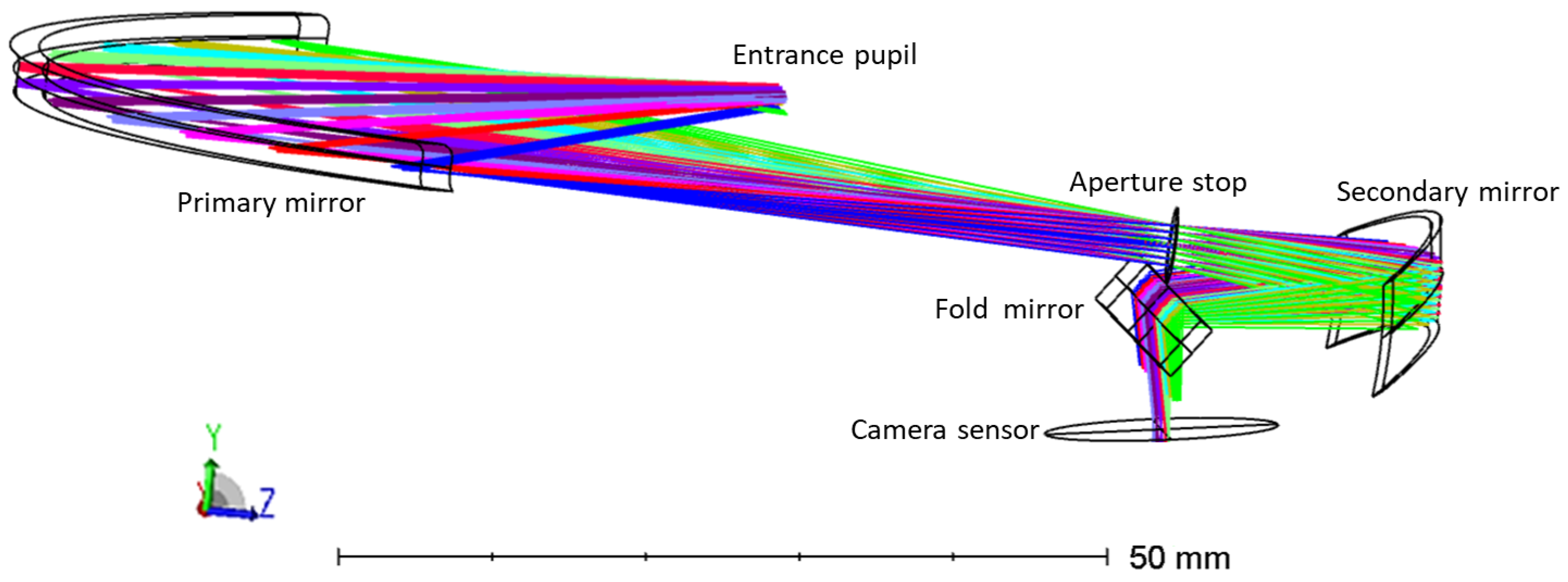
2.1. Optical System Design
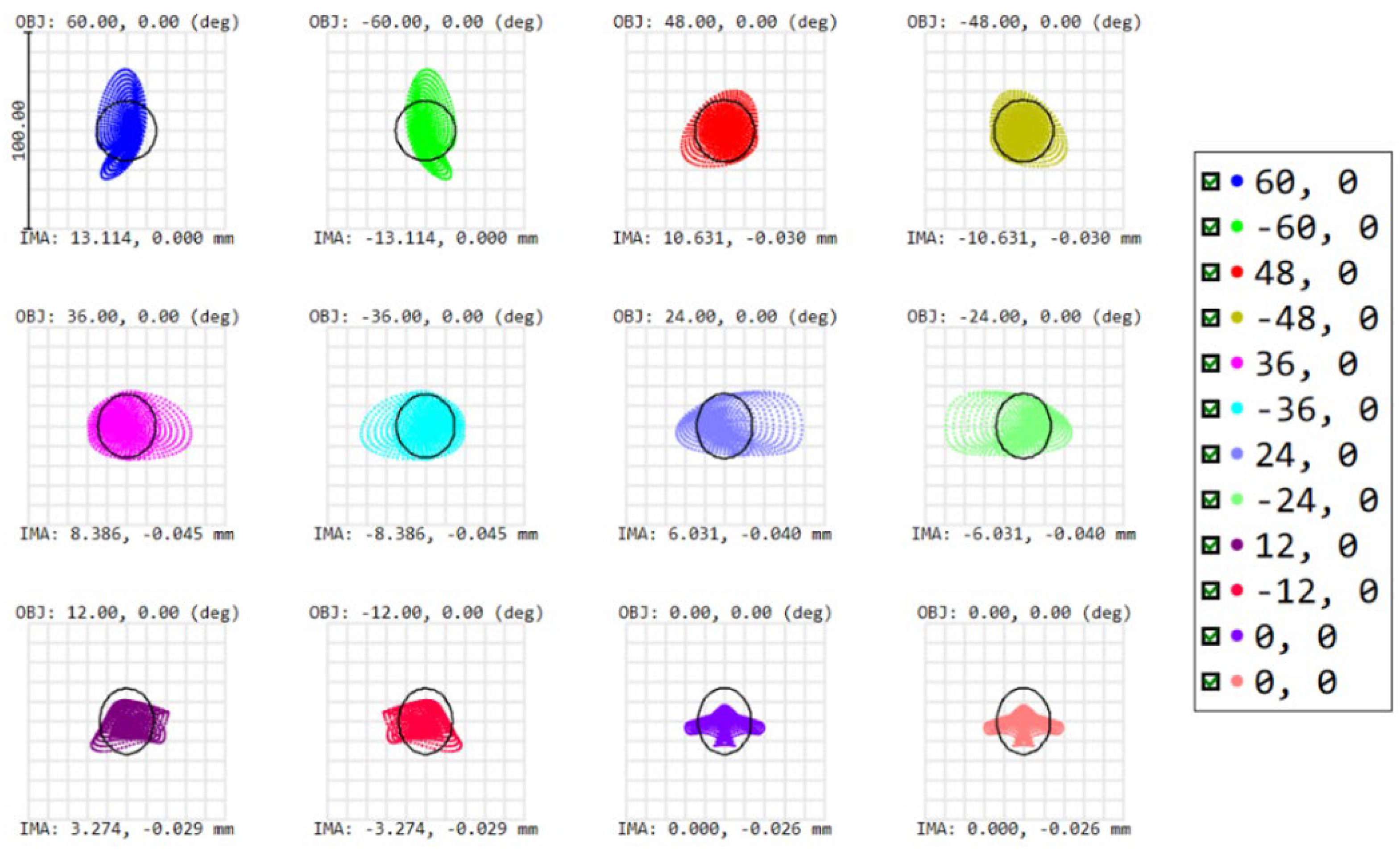
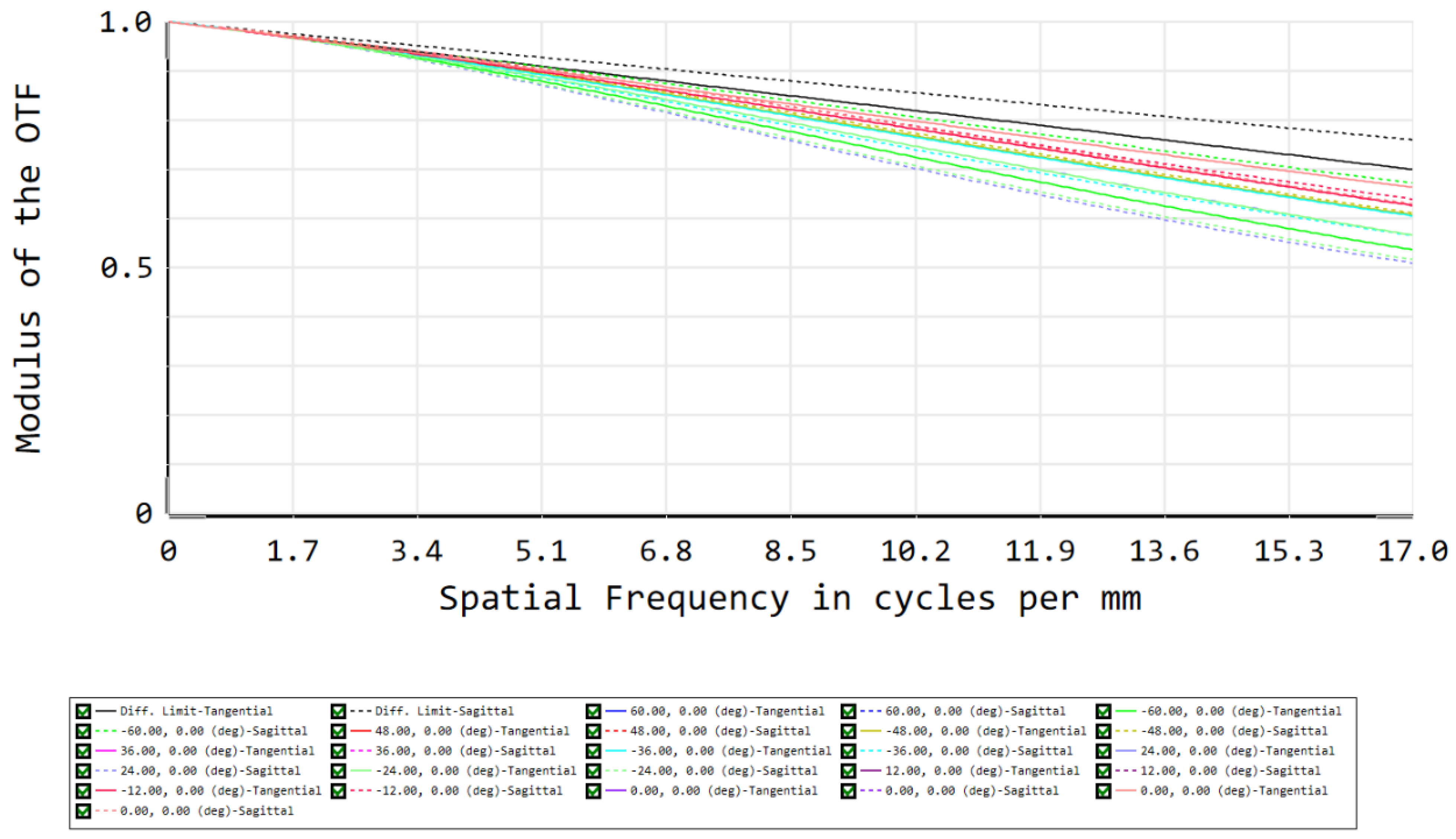
2.2. Performance Evaluation
2.3. Tolerance Analysis
3. Telescope Proof-of-Concept Demonstrator
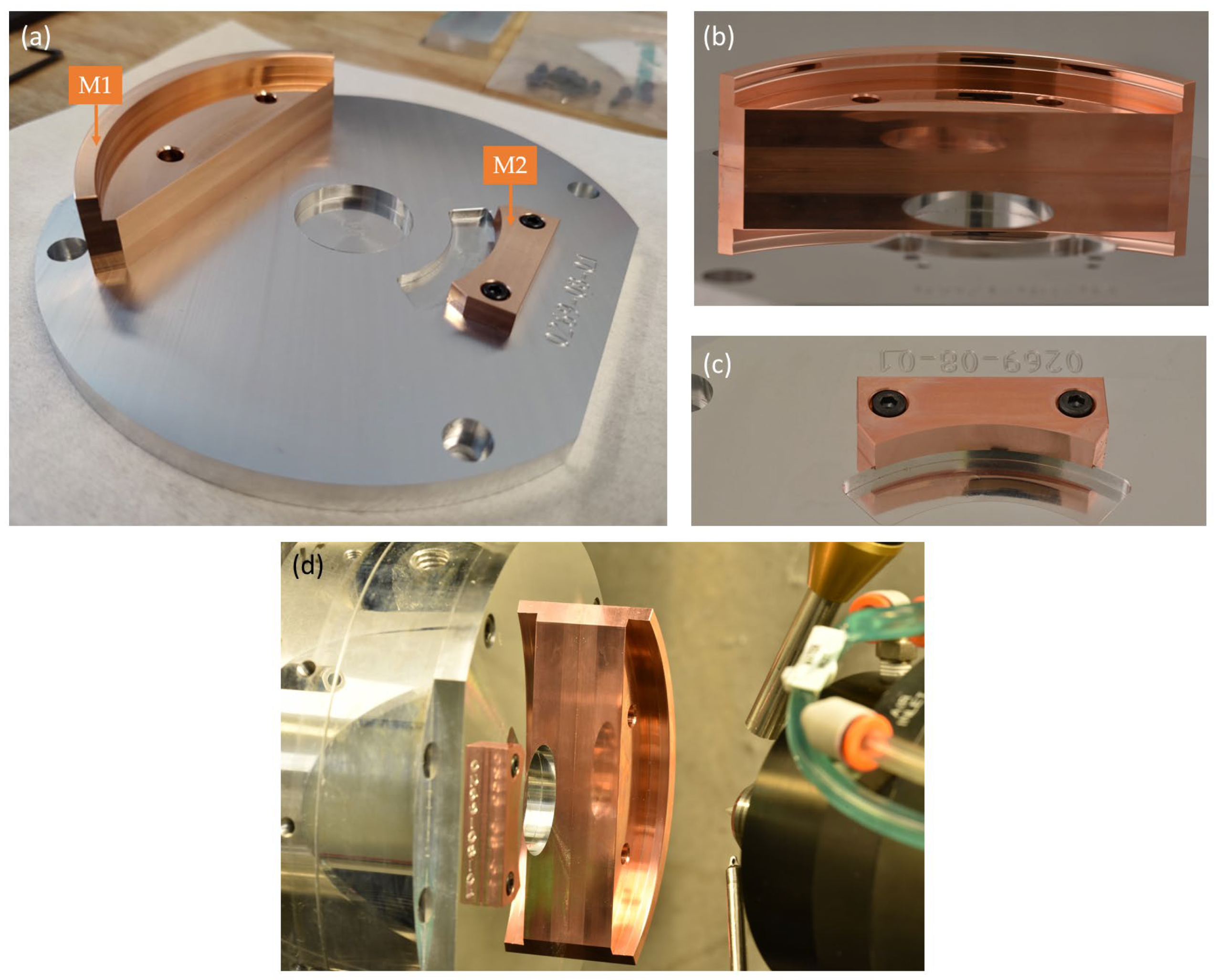
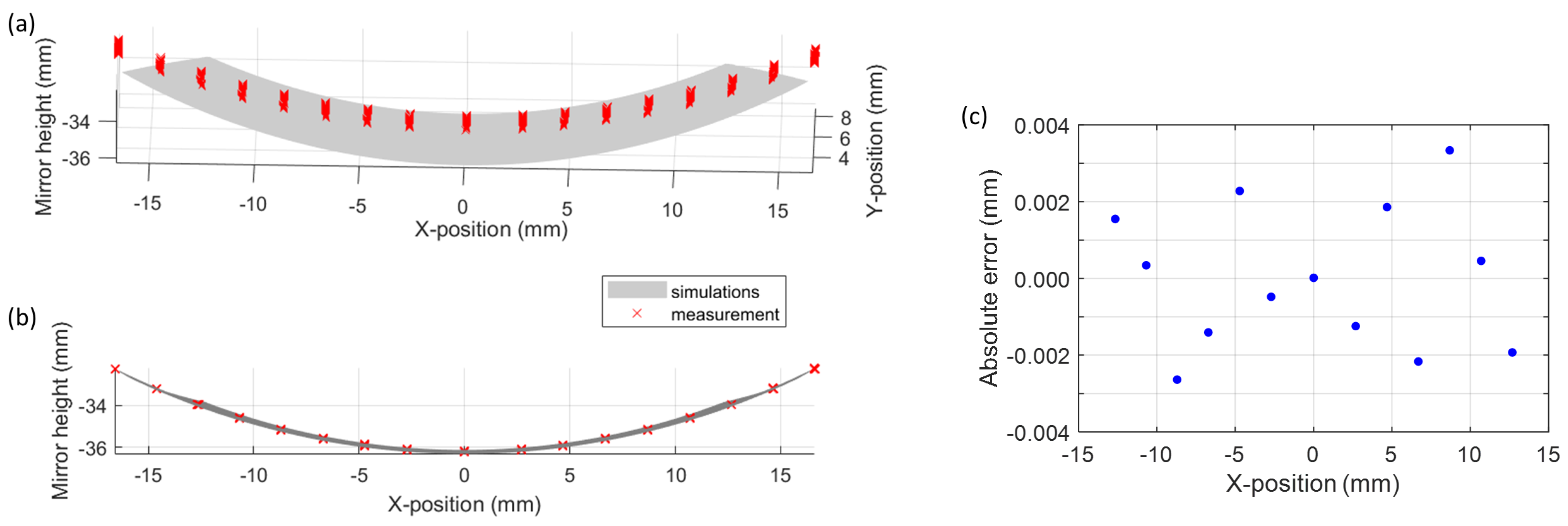
3.1. Manufacturing and Alignment Process
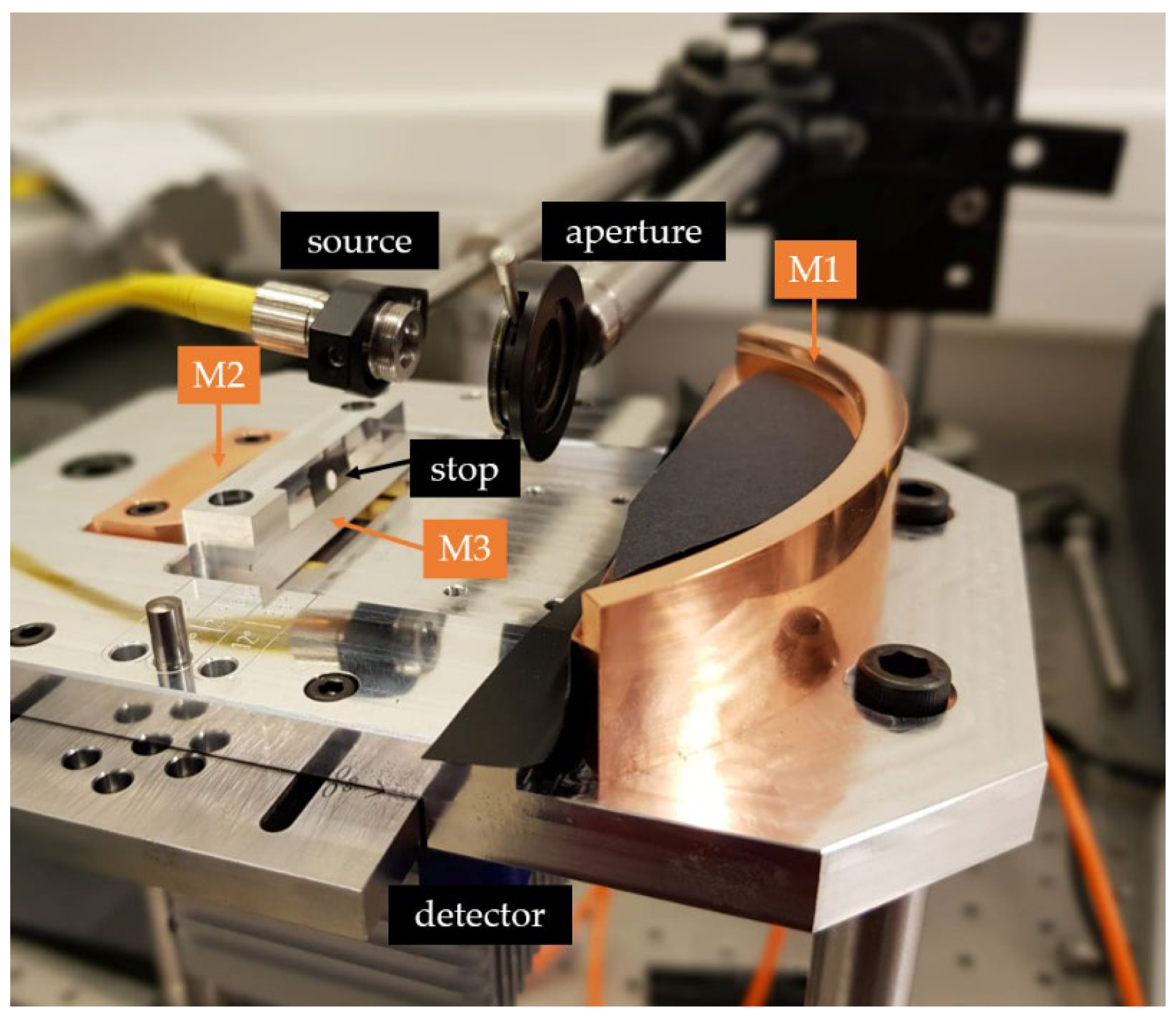
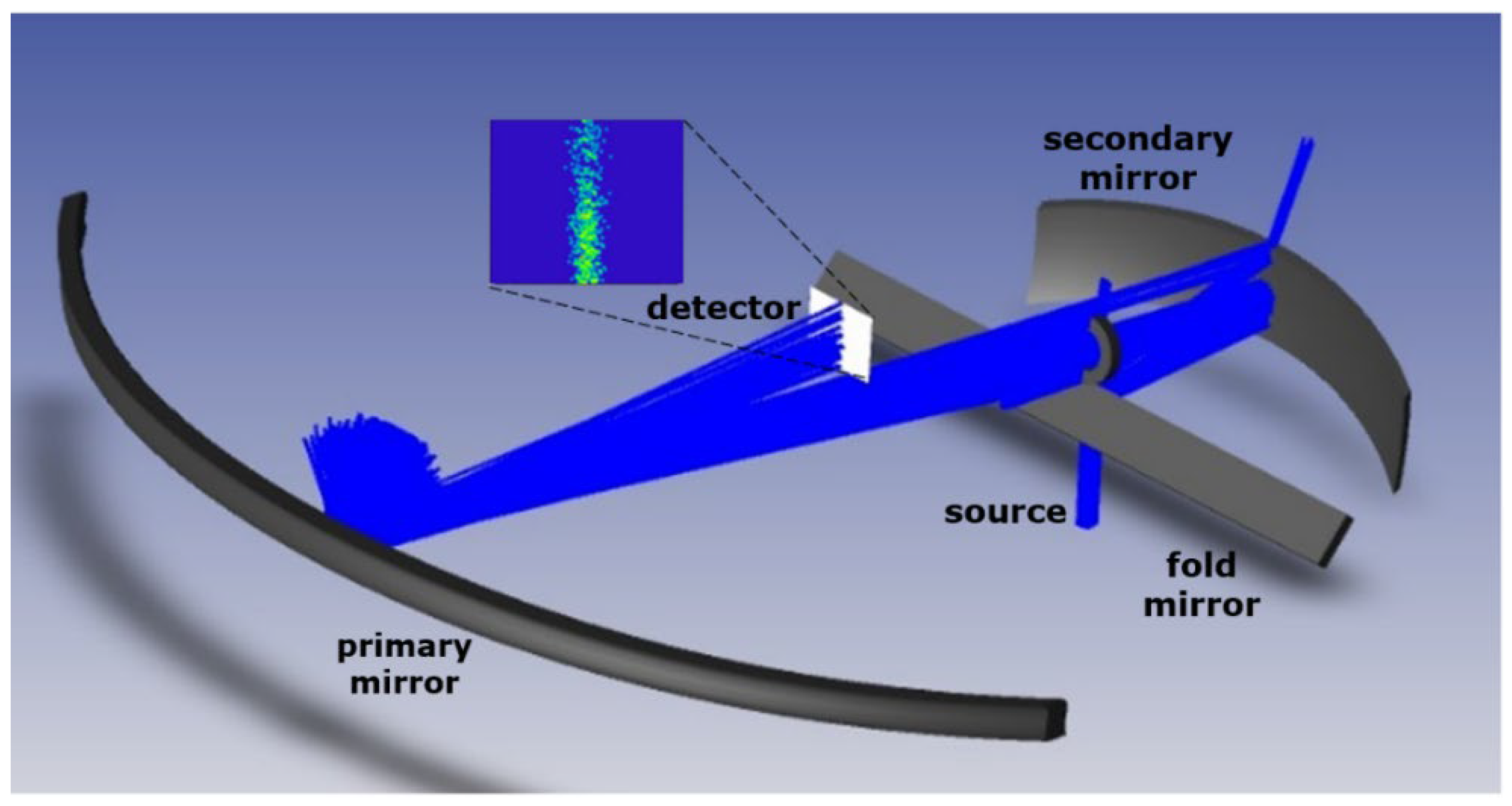
3.2. Laboratory Demonstrator Setup
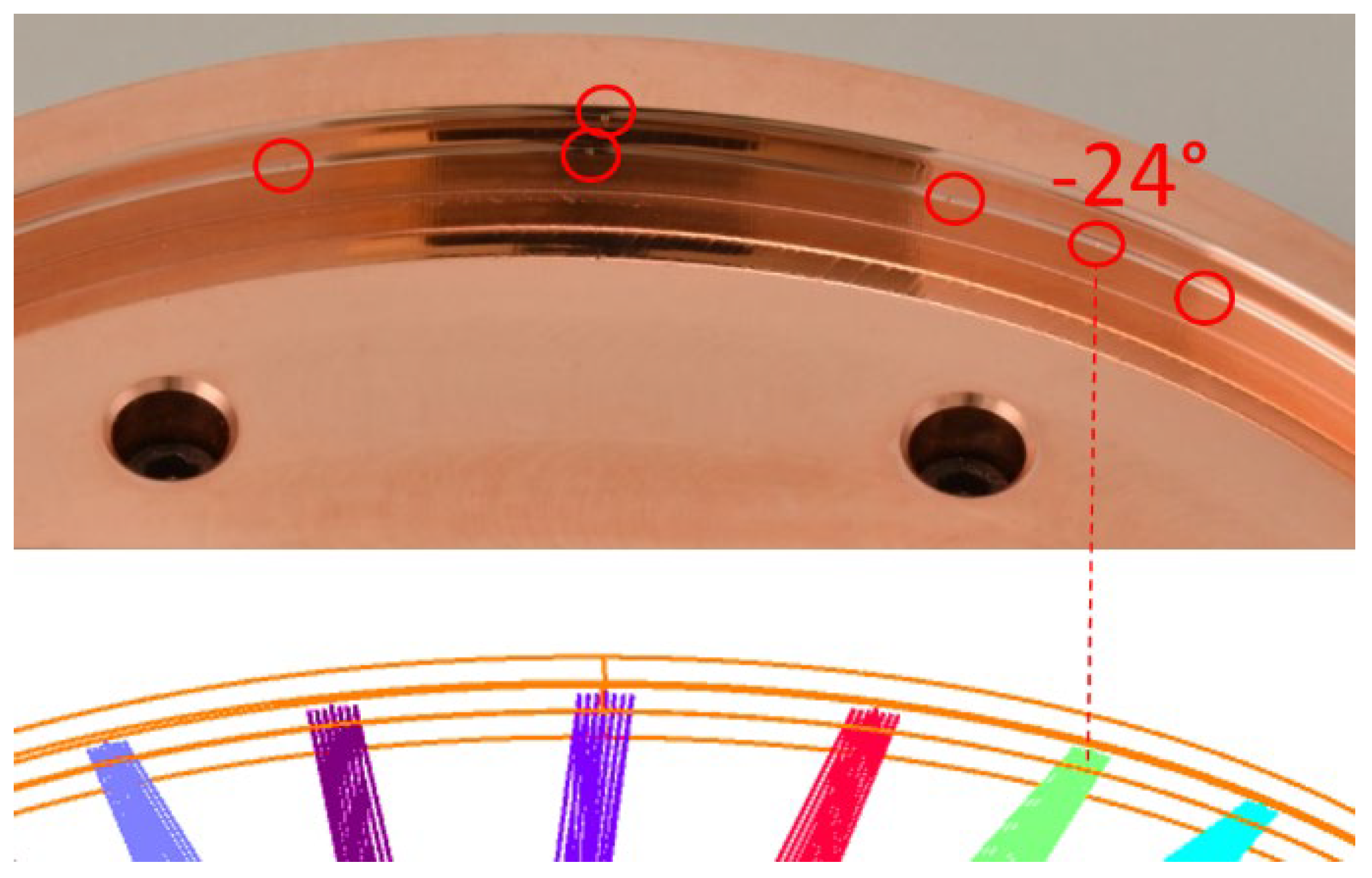
3.2.1. Telescope Alignment Using Red Laser Source
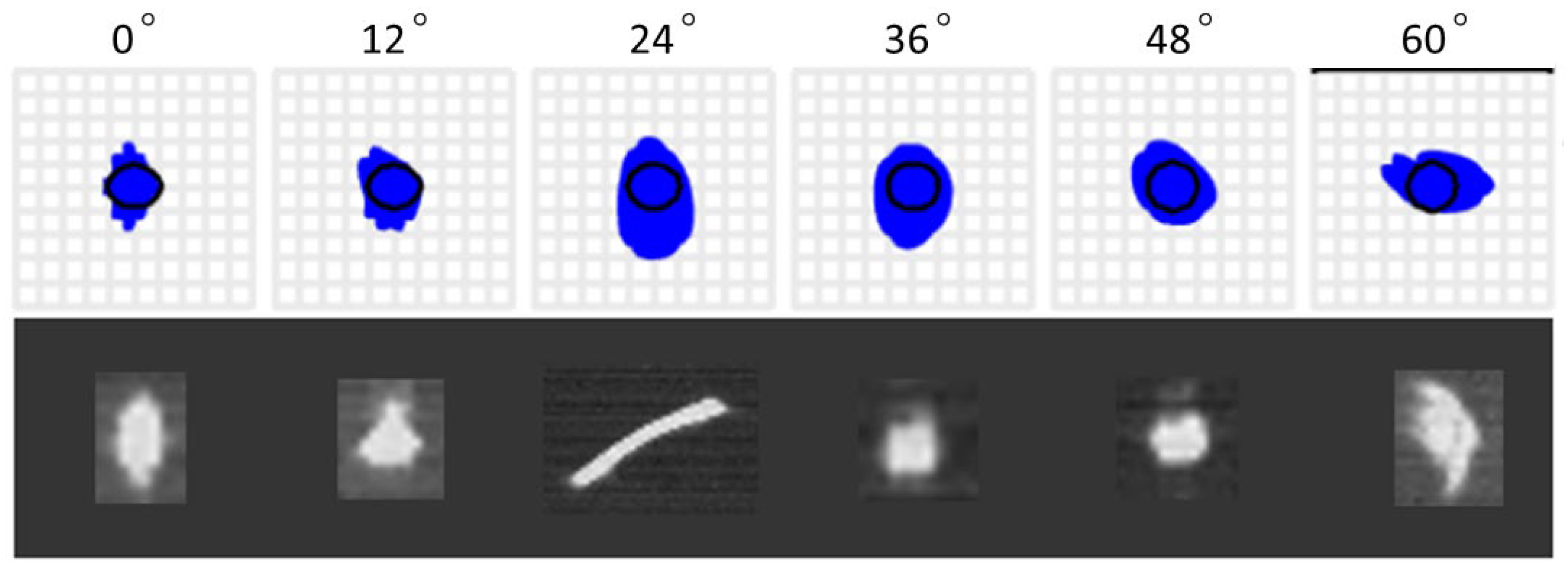
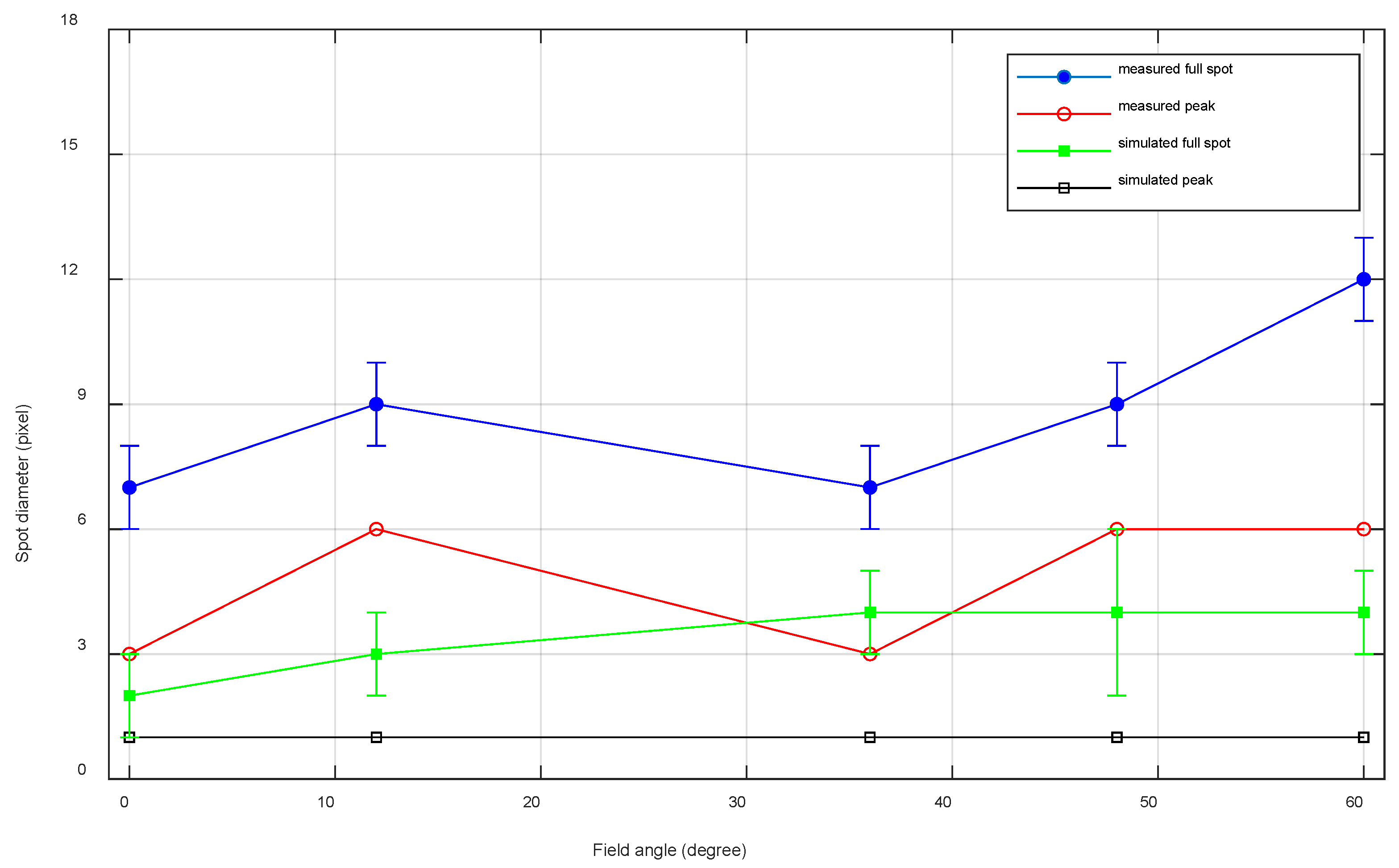
3.2.2. Performance Validation Using NIR Laser Source
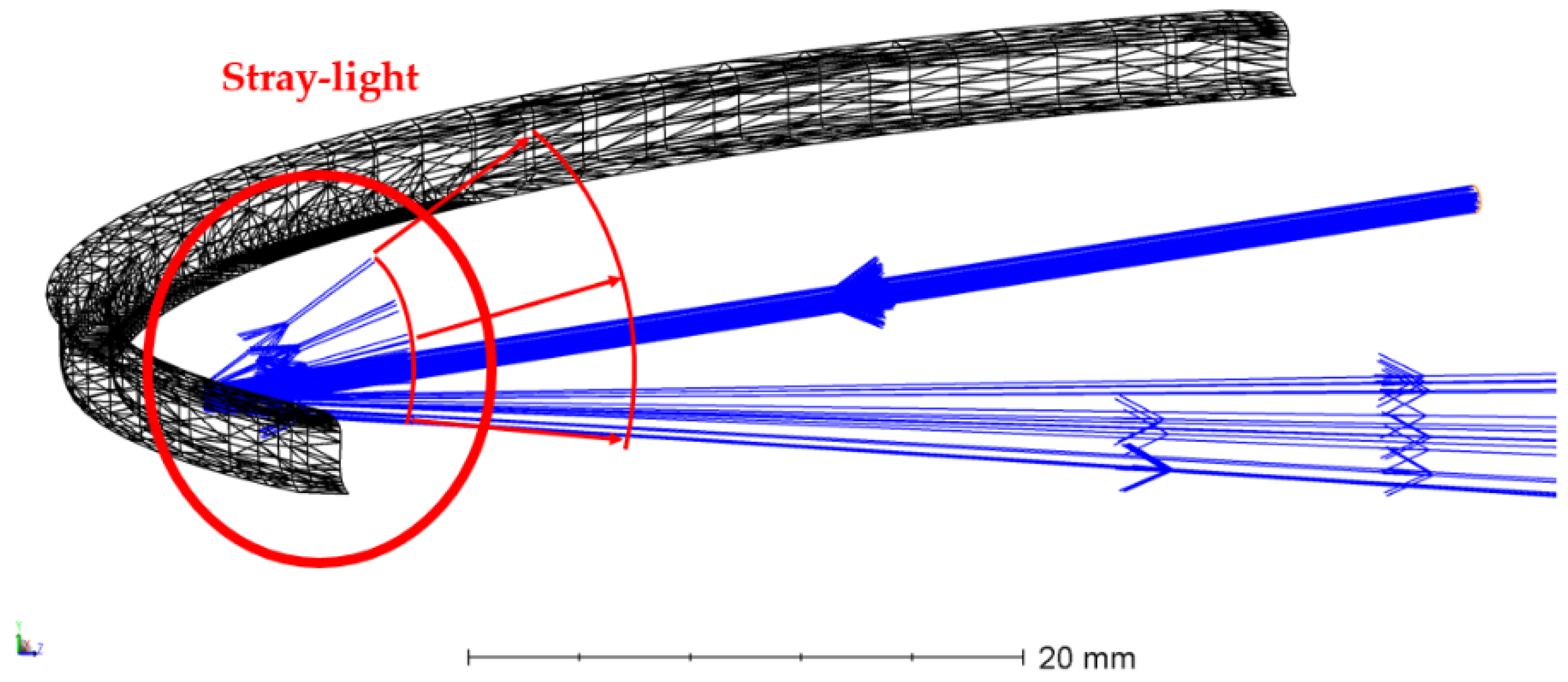
3.2.3. Stray Light Analysis
4. Discussion and Future Perspectives
4.1. Short-Term Perspectives and Comparison with the State-of-the-Art
4.2. Long-Term Perspectives towards Future Space Missions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Kansakar, P.; Hossain, F. A Review of Applications of Satellite Earth Observation Data for Global Societal Benefit and Stewardship of Planet Earth. Space Policy 2016, 36, 46–54. [Google Scholar] [CrossRef]
- Anderson, K.; Ryan, B.; Sonntag, W.; Kavvada, A.; Friedl, L. Earth Observation in Service of the 2030 Agenda for Sustainable Development. Geo-Spat. Inf. Sci. 2017, 20, 77–96. [Google Scholar] [CrossRef]
- Durrieu, S.; Nelson, R.F. Earth Observation from Space—The Issue of Environmental Sustainability. Space Policy 2013, 29, 238–250. [Google Scholar] [CrossRef]
- Betts, R.A.; Alfieri, L.; Bradshaw, C.; Caesar, J.; Feyen, L.; Friedlingstein, P.; Gohar, L.; Koutroulis, A.; Lewis, K.; Morfopoulos, C.; et al. Changes in Climate Extremes, Fresh Water Availability and Vulnerability to Food Insecurity Projected at 1.5 °C and 2 °C Global Warming with a Higher-Resolution Global Climate Model. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2018, 376, 20160452. [Google Scholar] [CrossRef] [PubMed]
- Guo, H.D.; Zhang, L.; Zhu, L.W. Earth Observation Big Data for Climate Change Research. Adv. Clim. Chang. Res. 2015, 6, 108–117. [Google Scholar] [CrossRef]
- ESA Climate Office. ESA Climate Office Role of EO in Understanding Climate Change. Available online: https://climate.esa.int/en/evidence/role-eo-understanding-climate-change/ (accessed on 9 September 2022).
- Bentley, J.; Olson, C. Field Guide to Lens Design; Greivenkamp, J.E., Ed.; SPIE Press: Bellingham, WA, USA, 2012; ISBN 9780819491640. [Google Scholar]
- Rolland, J.P.; Davies, M.A.; Suleski, T.J.; Evans, C.; Bauer, A.; Lambropoulos, J.C.; Falaggis, K. Freeform Opt. Imaging. Optica 2021, 8, 161. [Google Scholar] [CrossRef]
- Caron, J.; Bäumer, S. Progress in Freeform Mirror Design for Space Applications. In Proceedings SPIE of the International Conference on Space Optics—ICSO; SPIE Press: Bellingham, WA, USA, 2021; Volume 11852. [Google Scholar]
- Nijkerk, D.; van Venrooy, B.; Van Doorn, P.; Henselmans, R.; Draaisma, F.; Hoogstrate, A. The TROPOMI Telescope. In Proceedings of the International Conference on Space Optics ICSO; SPIE: Ajaccio, France, 2012. [Google Scholar]
- Veefkind, J.P.; Aben, I.; McMullan, K.; Förster, H.; de Vries, J.; Otter, G.; Claas, J.; Eskes, H.J.; de Haan, J.F.; Kleipool, Q.; et al. TROPOMI on the ESA Sentinel-5 Precursor: A GMES Mission for Global Observations of the Atmospheric Composition for Climate, Air Quality and Ozone Layer Applications. Remote Sens. Environ. 2012, 120, 70–83. [Google Scholar] [CrossRef]
- Jahn, W.; Ferrari, M.; Hugot, E. Innovative Focal Plane Design for Large Space Telescope Using Freeform Mirrors. Optica 2017, 4, 1188–1195. [Google Scholar] [CrossRef]
- Challita, Z.; Agócs, T.; Hugot, E.; Jaskó, A.; Kroes, G.; Taylor, W.; Miller, C.; Schnetler, H.; Venema, L.; Mosoni, L.; et al. Design and Development of a Freeform Active Mirror for an Astronomy Application. Opt. Eng. 2014, 53, 31311. [Google Scholar] [CrossRef]
- Schifano, L.; Berghmans, F.; Dewitte, S.; Smeesters, L. Optical Design of a Novel Wide-Field-of-View Space-Based Spectrometer for Climate Monitoring. Sensors 2022, 22, 5841. [Google Scholar] [CrossRef] [PubMed]
- Romaniello, V.; Spinetti, C.; Silvestri, M.; Buongiorno, M.F. A Methodology for CO2 Retrieval Applied to Hyperspectral PRISMA Data. Remote Sens. 2021, 13, 4502. [Google Scholar] [CrossRef]
- Zhao, Z.; Xie, F.; Ren, T.; Zhao, C. Atmospheric CO2 Retrieval from Satellite Spectral Measurements by a Two-Step Machine Learning Approach. J. Quant. Spectrosc. Radiat. Transf. 2022, 278, 108006. [Google Scholar] [CrossRef]
- Ayasse, A.K.; Dennison, P.E.; Foote, M.; Thorpe, A.K.; Joshi, S.; Green, R.O.; Duren, R.M.; Thompson, D.R.; Roberts, D.A. Methane Mapping with Future Satellite Imaging Spectrometers. Remote Sens. 2019, 11, 3054. [Google Scholar] [CrossRef]
- Elliott, E. Freeform Optics in OpticStudio; Knowledgebase Zemax OpticsStudio; Zemax: Canonsburg, PA, USA, 2021. [Google Scholar]
- Edmund Optics Broadband IR Laser Mirrors Feature Copper Substrate to Dissipate Excess Heat. Available online: https://www.edmundoptics.eu/company/press-releases/products/broadband-ir-laser-mirrors-feature-copper-substrate-to-dissipate-excess-heat/ (accessed on 3 September 2022).
- Alfa Aesar OFHC (Oxygen-Free High Conductivity). Available online: https://www.alfa.com/en/ofhc-oxygen-free-high-conductivity/ (accessed on 3 September 2022).
- Swartz, W.H.; Krotkov, N.; Lamsal, L.; Otter, G.; van Kempen, F.; Boldt, J.; Morgan, F.; van der Laan, L.; Zimbeck, W.; Storck, S.; et al. CHAPS: A Sustainable Approach to Targeted Air Pollution Observation from Small Satellites. In Sensors, Systems, and Next-Generation Satellites XXV; SPIE: Bellingham, WA, USA, 2021; Volume 1185817. [Google Scholar]
- Schifano, L.; Duerr, F.; Berghmans, F.; Dewitte, S.; Smeesters, L. Towards a Demonstrator Setup for a Wide-Field-of-View Visible to near-Infrared Camera Aiming to Characterize the Solar Radiation Reflected by the Earth. In Optics, Photonics and Digital Technologies for Imaging Applications VII; SPIE: Bellingham, WA, USA, 2022. [Google Scholar]
- Schifano, L.; Smeesters, L.; Geernaert, T.; Berghmans, F.; Dewitte, S. Design and Analysis of a Next-Generation Wide Field-of-View Earth Radiation Budget Radiometer. Remote Sens. 2020, 12, 425. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Tolerances | |
|---|---|
| Radius | 0.1% (precision) |
| Thickness | 0.01 mm |
| Decenter X | 0.01 mm |
| Decenter Y | 0.01 mm |
| Tilt X | 0.0167° |
| Tilt Y | 0.0167° |
| Irregularity | 0.2 fringes |
| Element Tolerances | |
|---|---|
| Decenter X | 0.01 mm |
| Decenter Y | 0.01 mm |
| Tilt X | 0.01° |
| Tilt Y | 0.01° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schifano, L.; Vervaeke, M.; Rosseel, D.; Verbaenen, J.; Thienpont, H.; Dewitte, S.; Berghmans, F.; Smeesters, L. Freeform Wide Field-of-View Spaceborne Imaging Telescope: From Design to Demonstrator. Sensors 2022, 22, 8233. https://doi.org/10.3390/s22218233
Schifano L, Vervaeke M, Rosseel D, Verbaenen J, Thienpont H, Dewitte S, Berghmans F, Smeesters L. Freeform Wide Field-of-View Spaceborne Imaging Telescope: From Design to Demonstrator. Sensors. 2022; 22(21):8233. https://doi.org/10.3390/s22218233
Chicago/Turabian StyleSchifano, Luca, Michael Vervaeke, Dries Rosseel, Jef Verbaenen, Hugo Thienpont, Steven Dewitte, Francis Berghmans, and Lien Smeesters. 2022. "Freeform Wide Field-of-View Spaceborne Imaging Telescope: From Design to Demonstrator" Sensors 22, no. 21: 8233. https://doi.org/10.3390/s22218233
APA StyleSchifano, L., Vervaeke, M., Rosseel, D., Verbaenen, J., Thienpont, H., Dewitte, S., Berghmans, F., & Smeesters, L. (2022). Freeform Wide Field-of-View Spaceborne Imaging Telescope: From Design to Demonstrator. Sensors, 22(21), 8233. https://doi.org/10.3390/s22218233