
Robust Identification and Segmentation of the Outer Skin Layers in Volumetric Fingerprint Data

Abstract
1. Introduction
2. OCT Fingerprinting
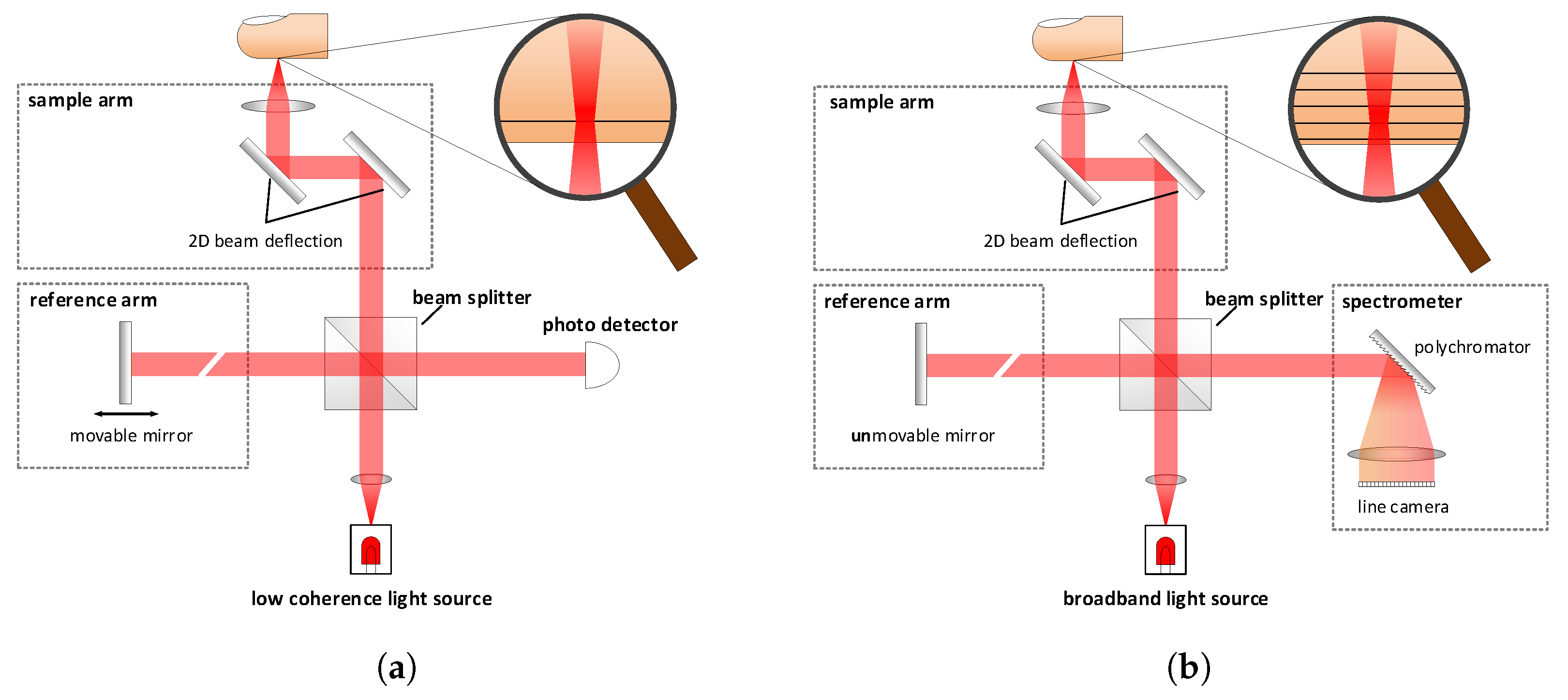
2.1. OCT Basics
2.2. Anatomy of Fingertip Skin
3. Related Work
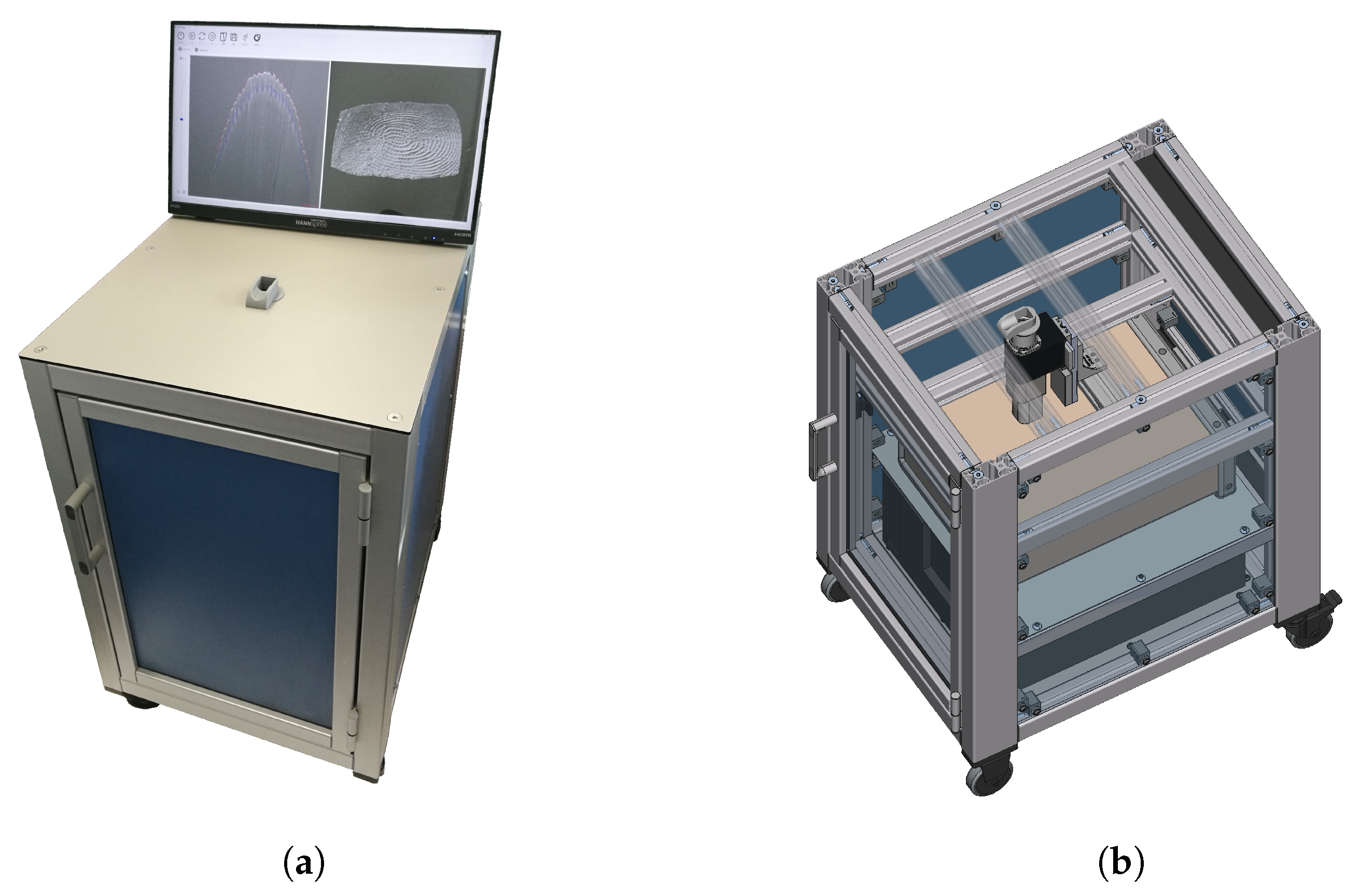
4. OCT Capture Device
- Centre wavelength: 1300 nm;
- Field of view: 16 mm × 16 mm;
- Imaging depth: 3.5 mm (air)/2.6 mm (water);
- Resolution: 20 µm (lateral) × 5.5 µm (axial);
- Scan size: 1024 × 1024 × 1024 voxels;
- Scan rate: 146 kHz line rate;
- Scan time: ca. 8 s (for this scan size).
5. Fingerprint Segmentation
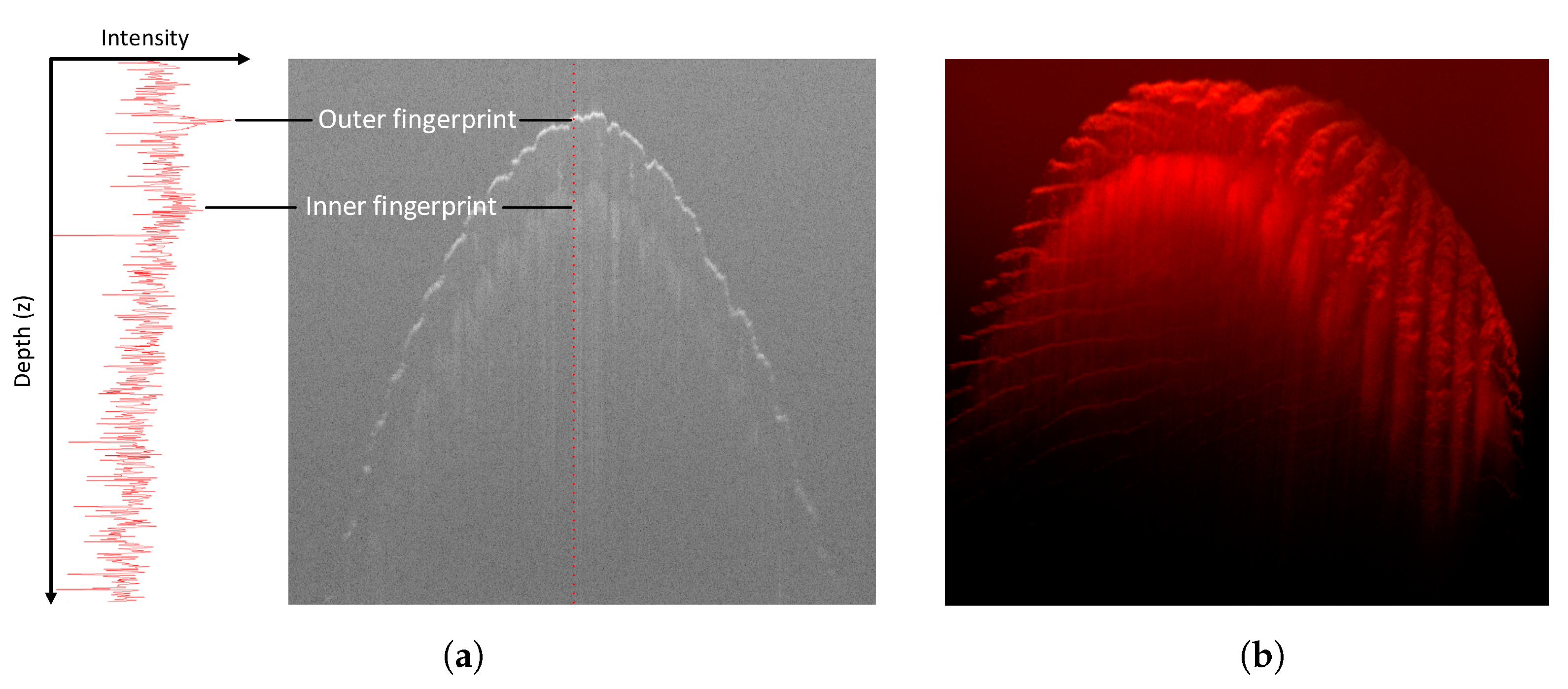
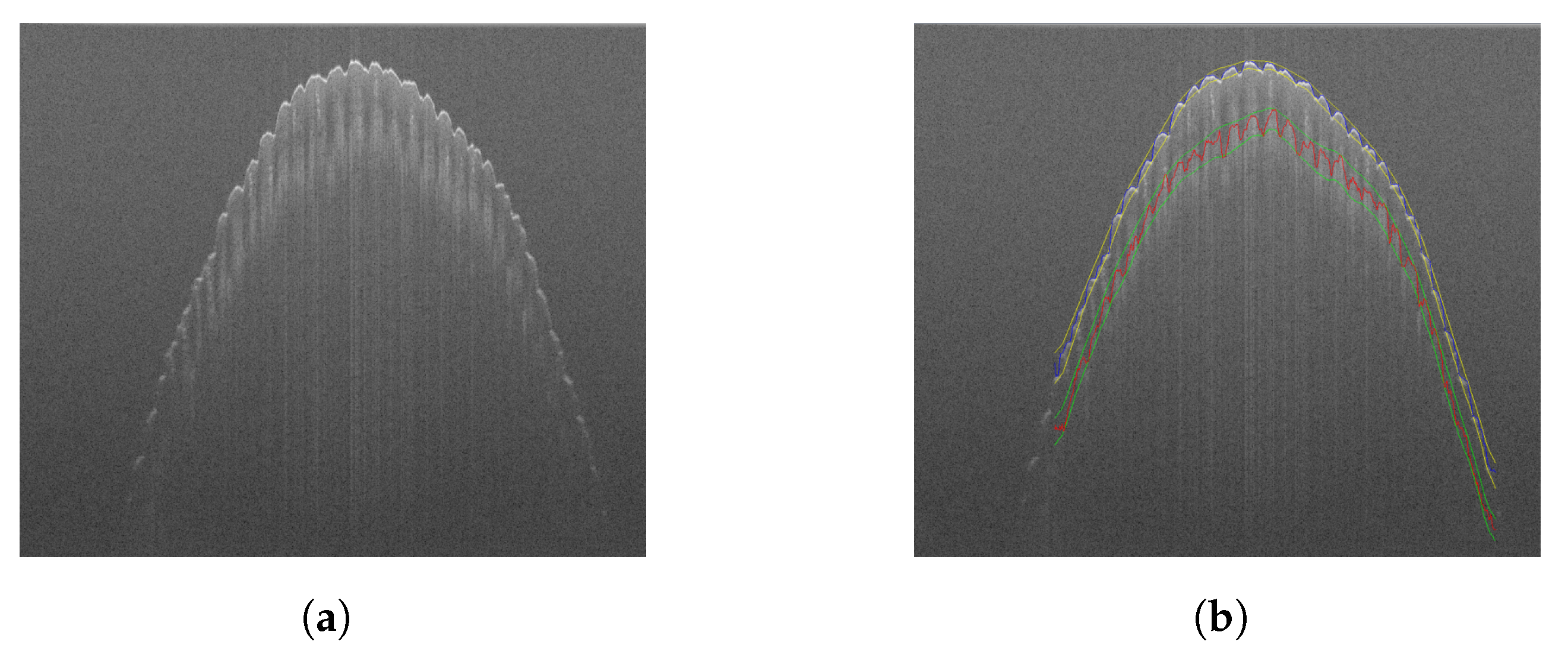
5.1. The Outer Fingerprint
5.2. The Inner Fingerprint
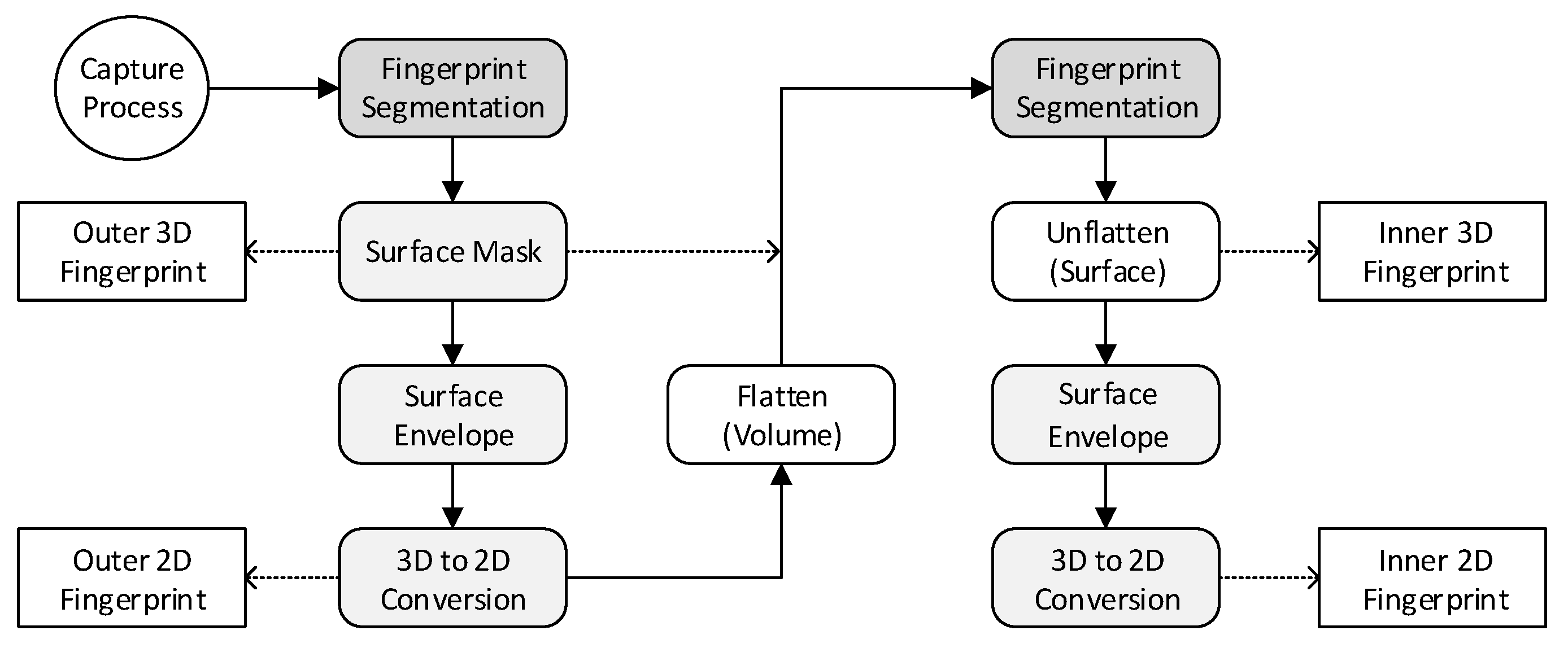
5.3. Algorithm: Fingerprint Segmentation
5.3.1. Fast and Robust Edge Detection
5.3.2. Intensity Roll-Off Compensation
5.3.3. Volume Pyramid
5.3.4. Contrast Enhancement
5.3.5. Fingerprint Region
| Algorithm 1: Fingerprint segmentation |
| Data: Volume V, Mask M (optional) Result: Surface S Def. := region scaling factor (hardware dependent) Def. := initial search region size (hardware dependent) Def. := set of initial kernel sizes (scan size and resolution dependent) 1 Copy the full volume scan V from CPU memory to located in GPU memory ▹Intensity roll-off compensation: 2 Store the average intensities of the en-face slices as a vector 3 Run a linear regression on to measure the deviation from the average 4 Set to normalize the intensity profile ▹Volume pyramid and contrast enhancement: 5 Generate additional versions of where is the result of downsampling by a factor of two along all three dimensions (note: for upsampling and downsampling, the GPU’s texture mapping unit is used in linear interpolation mode)  |
| Algorithm 2: Surface detection |
| Data: Volume V, region R, kernels L, mask M Result: Result Set  |
5.3.6. Surface Detection
5.4. Algorithm: Surface Masking
| Algorithm 3: Surface masking |
| Data: Volume V, outer fingerprint surface S Result: Mask M Def. := outer fingerprint region size  |
5.5. Algorithm: Surface Envelope
| Algorithm 4: Surface envelope |
| Data: Surface S, mask M Result: Envelope , Def. l := anatomy- and resolution-dependent constant set to the expected maximum distance between adjacent papillary ridges  |
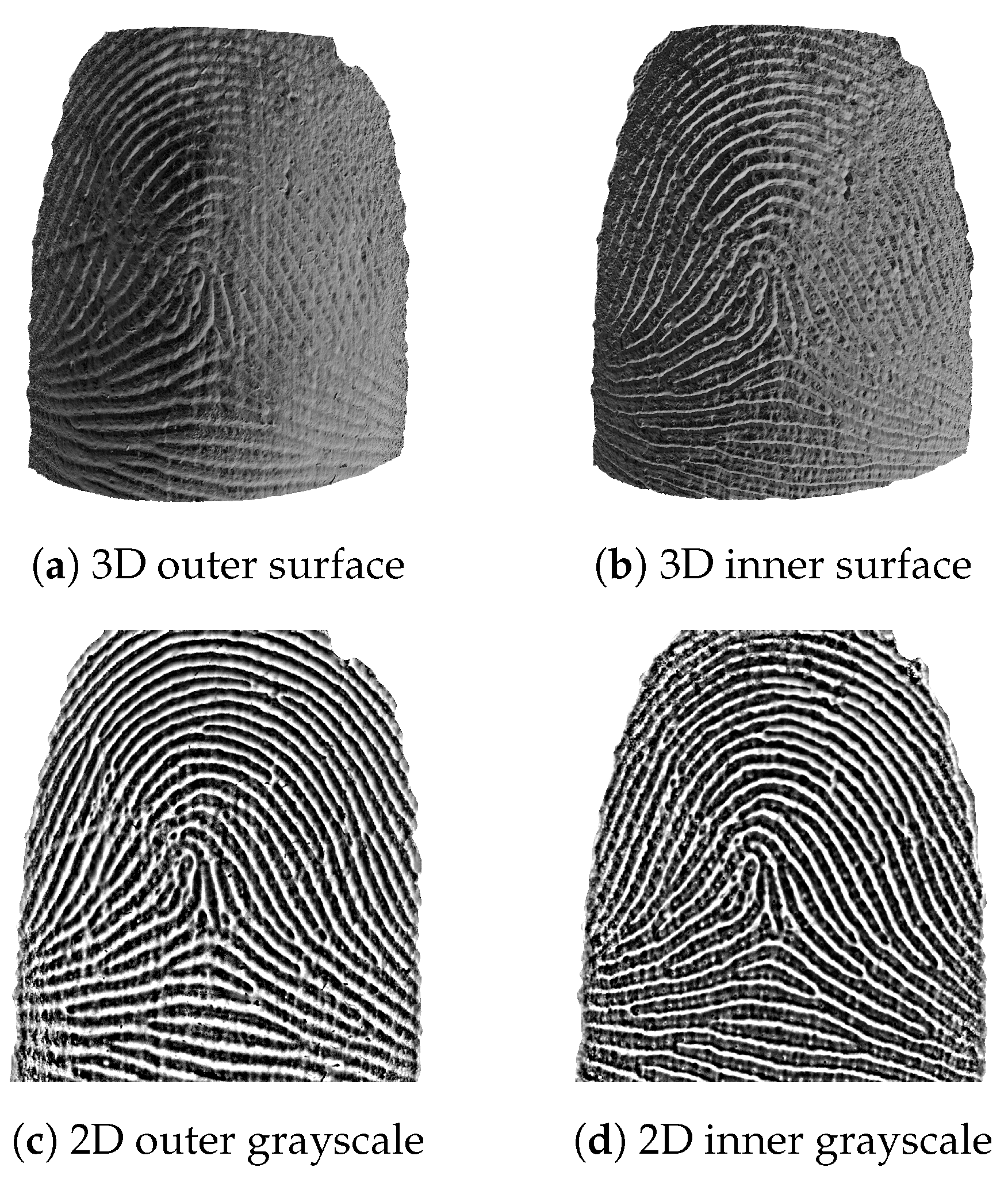
5.6. The 3D-to-2D Conversion
6. Evaluation
6.1. Segmentation Results
6.2. Runtime Evaluation
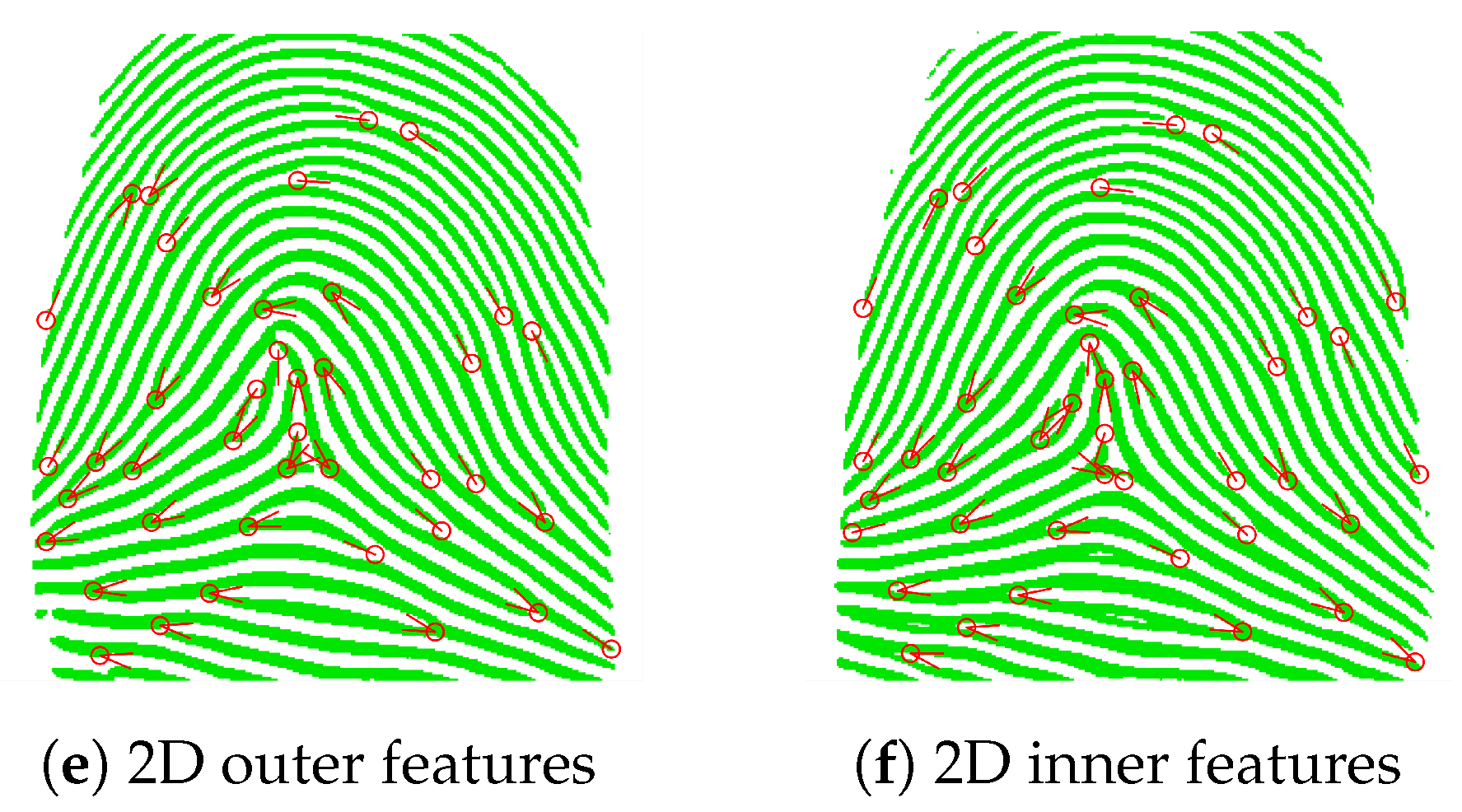
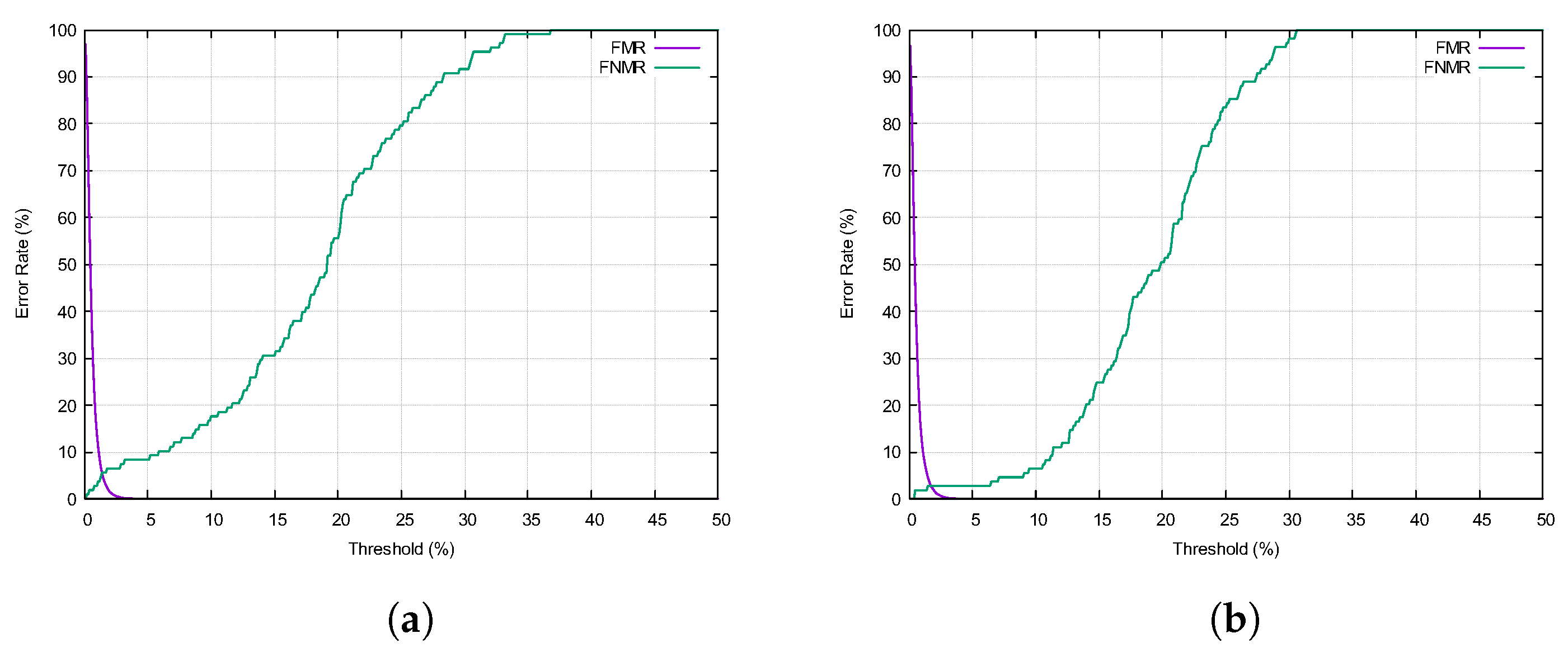
6.3. Compatibility with 2D Fingerprints
6.4. Compatibility with Foreign Data
7. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Union, Regulation (EC) no 767/2008 of the European parliament and of the council. Off. J. Eur. Union 2008.
- European Union, Regulation (EU) 2017/2226 of the European parliament and of the council. Off. J. Eur. Union 2017.
- Olsen, M.A.; Dusio, M.; Busch, C. Fingerprint skin moisture impact on biometric performance. In Proceedings of the 3rd International Workshop on Biometrics and Forensics (IWBF 2015), Gjovik, Norway, 3–4 March 2015; pp. 1–6. [Google Scholar]
- Krishnasamy, P.; Belongie, S.; Kriegman, D. Wet fingerprint recognition: Challenges and opportunities. In Proceedings of the 2011 International Joint Conference on Biometrics (IJCB), Washington, DC, USA, 11–13 October 2011; pp. 1–7. [Google Scholar]
- Drahansky, M.; Dolezel, M.; Urbanek, J.; Brezinova, E.; Kim, T. Influence of Skin Diseases on Fingerprint Recognition. BioMed Res. Int. 2012, 2012, 626148. [Google Scholar] [CrossRef] [PubMed]
- Jain, A.K.; Arora, S.S.; Best-Rowden, L.; Cao, K.; Sudhish, P.S.; Bhatnagar, A. Biometrics for Child Vaccination and Welfare: Persistence of Fingerprint Recognition for Infants and Toddlers; Michigan State University Technical Report; Michigan State University: East Lansing, MI, USA, 2015. [Google Scholar]
- Jain, A.K.; Arora, S.S.; Best-Rowden, L.; Cao, K.; Sudhish, P.S.; Bhatnagar, A.; Koda, Y. Giving Infants an Identity: Fingerprint Sensing and Recognition. In Proceedings of the International Conference on Information and Communication Technologies and Development, Ann Arbor, MI, USA, 3–6 June 2016. [Google Scholar]
- Sousedik, C.; Busch, C. Presentation attack detection methods for fingerprint recognition systems: A survey. IET Biom. 2014, 3, 219–233. [Google Scholar] [CrossRef]
- Gomez-Barrero, C.M.; Kolberg, J.; Busch, C. Multi-Modal Fingerprint Presentation Attack Detection: Analysing the Surface and the Inside. In Proceedings of the 12th IAPR International Conference on Biometrics (ICB 2019), Crete, Greece, 4–7 June 2019. [Google Scholar]
- De Boer, J.F.; Leitgeb, R.; Wojtkowski, M. Twenty-five years of optical coherence tomography: The paradigm shift in sensitivity and speed provided by Fourier domain OCT. Biomed. Opt. Express 2017, 8, 3248–3280. [Google Scholar] [CrossRef] [PubMed]
- Huang, D.; Swanson, E.; Lin, C.; Schuman, J.; Stinson, W.; Chang, W.; Hee, M.; Flotte, T.; Gregory, K.; Puliafito, C.; et al. Optical coherence tomography. Science 1991, 254, 1178–1181. [Google Scholar] [CrossRef] [PubMed]
- Yasuno, Y.; Makita, S.; Endo, T.; Aoki, G.; Nakamura, Y.; Yamanari, M.; Itoh, M.; Yatagai, T. Standard and Line-Field Fourier Domain Optical Coherence Tomography. In Proceedings of the 27th Annual Conference 2005 IEEE Engineering in Medicine and Biology, Shanghai, China, 1–4 September 2005; pp. 7224–7226. [Google Scholar]
- Auksorius, E.; Boccara, A.C. Fingerprint imaging from the inside of a finger with full-field optical coherence tomography. Biomed. Opt. Express 2015, 6, 4465–4471. [Google Scholar] [CrossRef] [PubMed]
- Jain, A.K.; Chen, Y.; Demirkus, M. Pores and Ridges: High-Resolution Fingerprint Matching Using Level 3 Features. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 15–27. [Google Scholar] [CrossRef] [PubMed]
- Plotnick, H. The Epidermal vs. the Dermal Fingerprint. AMA Arch. Derm. 1958, 77, 12–17. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Larin, K.V. Artificial fingerprint recognition by using optical coherence tomography with autocorrelation analysis. Appl. Opt. 2006, 45, 9238–9245. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Larin, K.V. Identification of artificial fingerprints using optical coherence tomography technique. SPIE 2006, 6402, 64020O. [Google Scholar]
- Darlow, L.N.; Akhoury, S.S.; Connan, J. A review of state-of-the-art speckle reduction techniques for optical coherence tomography fingertip scans. In Proceedings of the Seventh International Conference on Machine Vision (ICMV 2014), Milan, Italy, 19–21 November 2014. [Google Scholar]
- Darlow, L.N.; Akhoury, S.S.; Connan, J. Internal fingerprint acquisition from optical coherence tomography fingertip scans. In Proceedings of the 2015 Third International Conference on Digital Information, Networking, and Wireless Communications (DINWC), Moscow, Russia, 3–5 February 2015. [Google Scholar]
- Darlow, L.N.; Connan, J.; Akhoury, S.S. Internal fingerprint zone detection in optical coherence tomography fingertip scans. J. Electron. Imaging 2015, 24, 023027. [Google Scholar] [CrossRef]
- Darlow, L.N.; Connan, J. Efficient internal and surface fingerprint extraction and blending using optical coherence tomography. Appl. Opt. 2015, 54, 9258–9268. [Google Scholar] [CrossRef] [PubMed]
- Darlow, L.N.; Connan, J.; Singh, A. Performance analysis of a Hybrid fingerprint extracted from optical coherence tomography fingertip scans. In Proceedings of the 2016 International Conference on Biometrics (ICB), Halmstad, Sweden, 13–16 June 2016. [Google Scholar]
- Darlow, L.N.; Webb, L.; Botha, N. Automated spoof-detection for fingerprints using optical coherence tomography. Appl. Opt. 2016, 55, 3387–3396. [Google Scholar] [CrossRef] [PubMed]
- Darlow, L.N.; Singh, A.; Moolla, Y.; Ramokolo, R.; van Wyk, R.; Botha, N.; Webb-Ray, L. Damage invariant and high security acquisition of the internal fingerprint using optical coherence tomography. In Proceedings of the World Congress on Internet Security (WorldCIS-2016), London, UK, 14–16 November 2016. [Google Scholar]
- Auksorius, E.; Boccara, A.C. Fast subsurface fingerprint imaging with full-field optical coherence tomography system equipped with a silicon camera. J. Biomed. Opt. 2017, 22, 1–8. [Google Scholar] [CrossRef]
- Auksorius, E.; Raja, K.B.; Topcu, B.; Ramachandra, R.; Busch, C.; Boccara, C.A. Compact and Mobile Full-Field Optical Coherence Tomography Sensor for Subsurface Fingerprint Imaging. IEEE Access 2020, 8, 15194–15204. [Google Scholar] [CrossRef]
- Meissner, S.; Breithaupt, R.; Koch, E. Fingerprint fake detection by optical coherence tomography. In Proceedings of the Optical Coherence Tomography and Coherence Domain Optical Methods in Biomedicine XVII, San Francisco, CA, USA, 4–6 February 2013. [Google Scholar]
- Sousedik, C.; Breithaupt, R.; Busch, C. Volumetric Fingerprint Data Analysis using Optical Coherence Tomography. In Proceedings of the 2013 International Conference of the BIOSIG Special Interest Group, Darmstadt, Germany, 4–6 September 2013. [Google Scholar]
- Sousedik, C.; Busch, C. Quality of fingerprint scans captured using Optical Coherence Tomography. In Proceedings of the International Joint Conference on Biometrics, Clearwater, FL, USA, 29 September–2 October 2014. [Google Scholar]
- Breithaupt, R.; Sousedik, C.; Meissner, S. Full fingerprint scanner using optical coherence tomography. In Proceedings of the 3rd International Workshop on Biometrics and Forensics (IWBF 2015), Gjovik, Norway, 3–4 March 2015. [Google Scholar]
- Sousedik, C.; Breithaupt, R. Full-fingerprint volumetric subsurface imaging using Fourier-domain Optical Coherence Tomography. In Proceedings of the 2017 5th International Workshop on Biometrics and Forensics (IWBF), Coventry, UK, 4–5 April 2017. [Google Scholar]
- Sousedik, C.; Breithaupt, R.; Bours, P. Classification of Fingerprints Captured Using Optical Coherence Tomography; Image Analysis; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Federal Office for Information Security. TR-03121-3.1 Technical Guideline Biometrics for Public Sector Applications. Part 3: Application Profiles and Function Modules, Volume 1: Border Control, Version 5.2; Federal Office for Information Security: Bonn, Germany, 2021; p. 23. [Google Scholar]
- Federal Office for Information Security. TR-03121-3.2 Technical Guideline Biometrics for Public Sector Applications. Part 3: Application Profiles and Function Modules, Volume 2: Enrollment Scenarios for Identity Documents, Version 5.2; Federal Office for Information Security: Bonn, Germany, 2021; p. 34. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation | Execution Time in ms |
|---|---|
| Copy volume from CPU to GPU memory | 175 |
| Volume flattening (GPU) | 23 |
| Outer fingerprint segmentation (GPU) | 260 |
| Inner fingerprint segmentation (GPU) | 290 |
| Surface masking (CPU) | 20 |
| 2 × surface envelope (CPU) | 50 |
| 2 × 3D-to-2D conversion (CPU) | 4 |
| Total time | 822 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kirfel, A.; Scheer, T.; Jung, N.; Busch, C. Robust Identification and Segmentation of the Outer Skin Layers in Volumetric Fingerprint Data. Sensors 2022, 22, 8229. https://doi.org/10.3390/s22218229
Kirfel A, Scheer T, Jung N, Busch C. Robust Identification and Segmentation of the Outer Skin Layers in Volumetric Fingerprint Data. Sensors. 2022; 22(21):8229. https://doi.org/10.3390/s22218229
Chicago/Turabian StyleKirfel, Alexander, Tobias Scheer, Norbert Jung, and Christoph Busch. 2022. "Robust Identification and Segmentation of the Outer Skin Layers in Volumetric Fingerprint Data" Sensors 22, no. 21: 8229. https://doi.org/10.3390/s22218229
APA StyleKirfel, A., Scheer, T., Jung, N., & Busch, C. (2022). Robust Identification and Segmentation of the Outer Skin Layers in Volumetric Fingerprint Data. Sensors, 22(21), 8229. https://doi.org/10.3390/s22218229