
A Novel Detection and Assessment Method for Operational Defects of Pipe Jacking Tunnel Based on 3D Longitudinal Deformation Curve: A Case Study



Abstract
1. Introduction
2. Site Information
3. Methodology
3.1. Assessment Theory of Defect Location Based on 3D-LDC
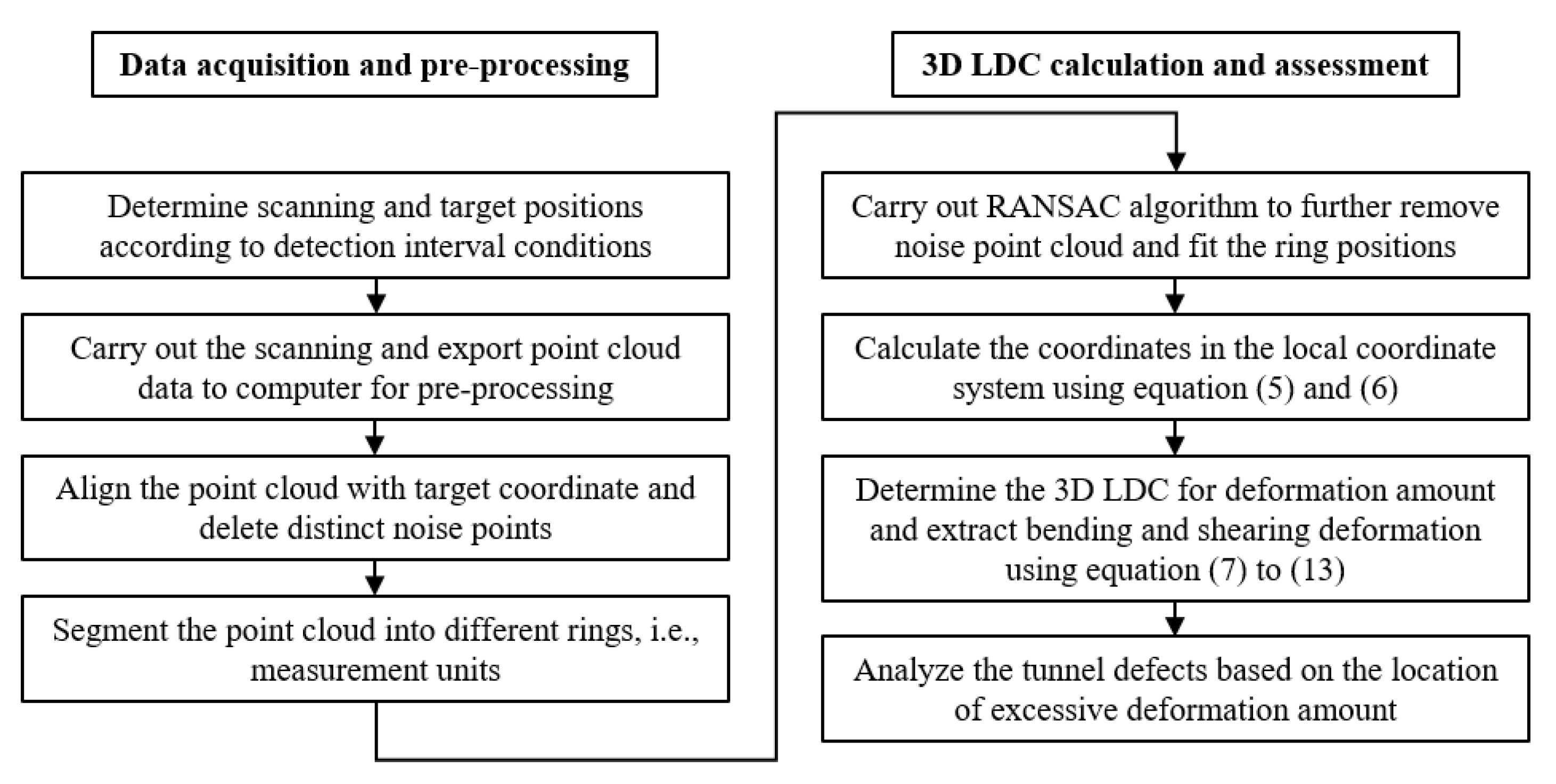
3.2. Data Acquisition and Pre-Processing Methods
3.3. 3D Longitudinal Deformation Calculation Method Based on Point Cloud
3.4. Workflow of Proposed Method
4. Field Experiment
4.1. Overview of Field Experiment
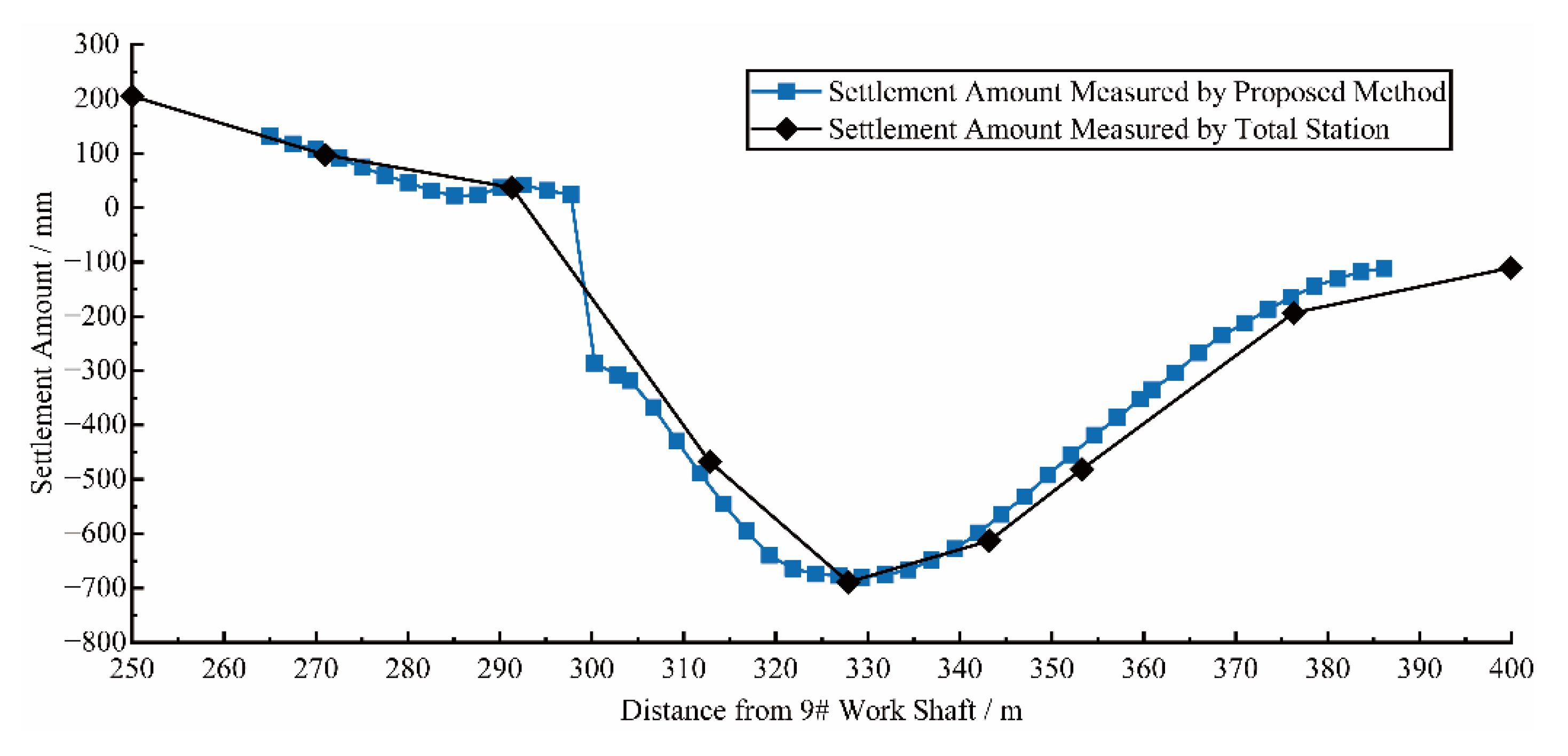
4.2. Results of Field Experiment
5. Tunnel Defect Assessment
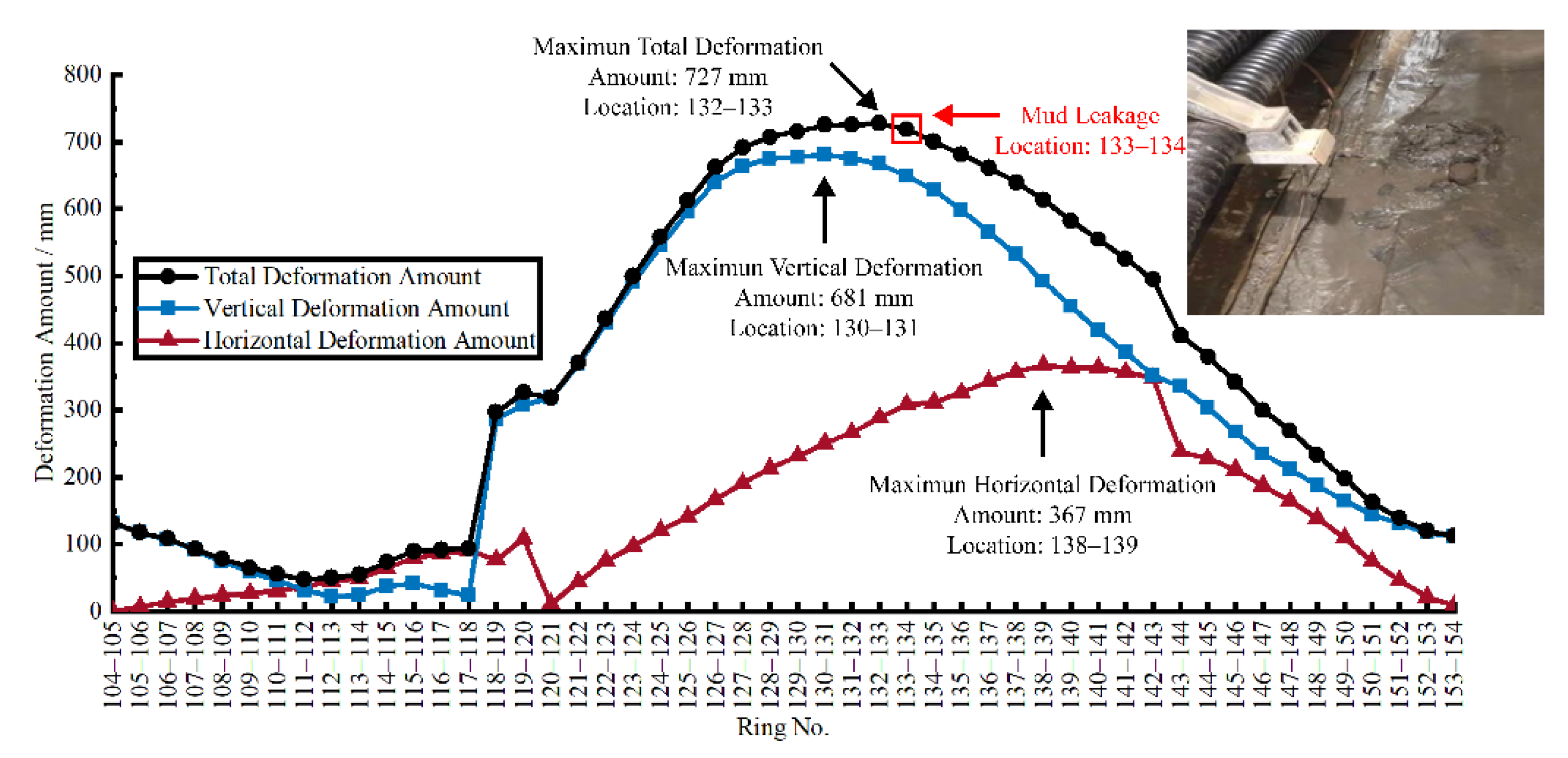
5.1. Defect Assessment Based on Deformation Amount
5.2. Defect Assessment Based on Bending Deformation
5.3. Defect Assessment Based on Shearing Deformation
6. Discussion and Conclusions
6.1. Discussion
- (1)
- This paper verifies the feasibility and accuracy of the proposed method in a pipe jacking tunnel, which has a broad application prospect. However, the number of defects used to validate the proposed method is limited due to the uncommon occurrence of severe defects in tunnel projects in practice. In addition, the 3D-LDC measurement method for tunnels proposed in this paper is theoretically applicable to various structural forms of tunnels, such as shield tunnels and rock tunnels. It can be subsequently verified by testing more engineering practices.
- (2)
- A tunnel is a structure buried in rock and soil, and there are hidden surfaces that cannot be measured. As a result, some deformation indexes, such as joint dislocation, are difficult to be measured directly. Therefore, some indexes in this paper have not been verified by other measurement methods.
- (3)
- The advantages of 3D laser scanning incldeu fast non-contact data acquisition procedure and a huge amount of acquired data. One station of scanning, which takes less than 5 minutes, will cover tens of meters, depending on tunnel diameter. The non-contact scanning procedure allows the power transmission tunnel to function normally during the detection and assessment. The point cloud data is distributed in three-dimensional space, which is hard to be realized by other methods, such as distributed fiber optic sensors and static hydraulic levels. The whole scanning process is automatic, which is not possible for a traditional method using a total station. The process of 3D laser scanning point cloud data processing, however, is still time-consuming and requires improvement in automatic processing. As well, the measurement method based on a 3D point cloud is to be improved for the measurement of local deformation at the joint.
- (4)
- For 3D-LDC, more detailed criteria for disease determination can be proposed through theoretical analysis and numerical simulation, and. The 3D-LDC can also be combined with the information model to visualize the tunnel performance in a more intuitive way.
6.2. Conclusions
- (1)
- The inspection method proposed in this paper can improve the acquisition efficiency and spatial resolution of tunnel deformation measurement results, and obtain high accuracy of 3D-LDC. 3D-LDC provided in this paper has higher spatial resolution and larger spatial dimension, which includes the spatial deformation data of any part of the tunnel and can obtain various deformation indexes in 3D space.
- (2)
- This paper illustrates the mechanism of tunnel disease and longitudinal deformation, and proposes the theoretical basis of 3D-LDC for tunnel disease assessment. The correlation between deformation amount, bending deformation, shearing deformation and tunnel defect in 3D-LDC of tunnels is verified through field experiments. This paper is a guide to the performance assessment based on tunnel longitudinal deformation.
- (3)
- Comparing the accuracy of 3D-LDC and 2D-LDC indexes in tunnel defect assessment, it is shown that 3D LDC contains more accurate and comprehensive data and information. The assessment of tunnel defects requires consideration of both horizontal displacement and vertical settlement. Considering only settlement when evaluating tunnel performance may lead to overestimation of the structure performance and misjudgment of the defects.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmed, M.O.; Khalef, R.; Ali, G.G.; El-adaway, I.H. Evaluating Deterioration of Tunnels Using Computational Machine Learning Algorithms. J. Constr. Eng. Manag. 2021, 141, 04021125. [Google Scholar] [CrossRef]
- Jin, D.; Yuan, D.; Li, X.; Zheng, H. An In-Tunnel Grouting Protection Method for Excavating Twin Tunnels beneath an Existing Tunnel. Tunn. Undergr. Sp. Technol. 2018, 71, 27–35. [Google Scholar] [CrossRef]
- Jin, D.; Yuan, D.; Li, X.; Zheng, H. Analysis of the Settlement of an Existing Tunnel Induced by Shield Tunneling Underneath. Tunn. Undergr. Sp. Technol. 2018, 81, 209–220. [Google Scholar] [CrossRef]
- Hasan, S.; Elwakil, E. Operational Based Stochastic Cluster Regression-Based Modeling for Predicting Condition Rating of Highway Tunnels. Can. J. Civ. Eng. 2021, 48, 1601–1611. [Google Scholar] [CrossRef]
- Liu, D.; Wang, F.; Hu, Q.; Huang, H.; Zuo, J.; Tian, C.; Zhang, D. Structural Responses and Treatments of Shield Tunnel Due to Leakage: A Case Study. Tunn. Undergr. Sp. Technol. 2020, 103, 103471. [Google Scholar] [CrossRef]
- Liu, J.; Shi, C.; Wang, Z.; Lei, M.; Zhao, D.; Cao, C. Damage Mechanism Modelling of Shield Tunnel with Longitudinal Differential Deformation Based on Elastoplastic Damage Model. Tunn. Undergr. Sp. Technol. 2021, 113, 103952. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, M.; Pan, Y.; Ma, S.; Li, Z.; Yang, X.; Wu, Z. Effects of Long-Term Leakage of Shield Lining on Tunnelling-Induced Ground Consolidation Movements. Eur. J. Environ. Civ. Eng. 2021. [Google Scholar] [CrossRef]
- Liu, D.; Tian, C.; Wang, F.; Hu, Q.; Zuo, J. Longitudinal Structural Deformation Mechanism of Shield Tunnel Linings Considering Shearing Dislocation of Circumferential Joints. Comput. Geotech. 2021, 139, 104384. [Google Scholar] [CrossRef]
- Oh, J.; Moon, T. Seismic Design of a Single Bored Tunnel: Longitudinal Deformations and Seismic Joints. Rock Mech. Rock Eng. 2018, 51, 893–910. [Google Scholar] [CrossRef]
- Yu, H.; Chen, X.; Chen, W.; Li, P. Analytical Solution for Longitudinal Dynamic Responses of Long Tunnels under Arbitrary Excitations. Int. J. Struct. Stab. Dyn. 2021, 21, 2150174. [Google Scholar] [CrossRef]
- Cheng, W.C.; Song, Z.P.; Tian, W.; Wang, Z.F. Shield Tunnel Uplift and Deformation Characterisation: A Case Study from Zhengzhou Metro. Tunn. Undergr. Sp. Technol. 2018, 79, 83–95. [Google Scholar] [CrossRef]
- Liang, R.; Wu, J.; Sun, L.; Shen, W.; Wu, W. Performances of Adjacent Metro Structures Due to Zoned Excavation of a Large-Scale Basement in Soft Ground. Tunn. Undergr. Sp. Technol. 2021, 117, 104123. [Google Scholar] [CrossRef]
- Gil Lorenzo, S. In Situ Behaviour of an Instrumented Ring Subjected to Incipient TBM Steering around a Curve. Eng. Struct. 2021, 249, 113124. [Google Scholar] [CrossRef]
- Chen, R.; Meng, F.; Li, Z.; Ye, Y.; Ye, J. Investigation of Response of Metro Tunnels Due to Adjacent Large Excavation and Protective Measures in Soft Soils. Tunn. Undergr. Sp. Technol. 2016, 58, 224–235. [Google Scholar] [CrossRef]
- Li, X.; Zhou, X.; Hong, B.; Zhu, H. Experimental and Numerical Study on Longitudinal Axial Force and Deformation of Shield Tunnel. In Proceedings of the GeoShanghai 2018 International Conference: Tunnelling and Underground Construction, Shanghai, China, 27–30 May 2018; Zhang, D., Huang, X., Eds.; Springer: Singapore, 2018; pp. 329–338. [Google Scholar]
- Liang, F.; Yuan, Q.; Song, Z.; Li, J.; Zhang, S. Longitudinal Responses of Shield Tunnel Subjected to Surcharge Considering Dislocation. Proc. Inst. Civ. Eng. Geotech. Eng. 2021, 174, 342–354. [Google Scholar] [CrossRef]
- Chen, X.; Xu, Z.; Bao, X.; Cui, H. Overview of Research on Tunnel Defects Monitoring and Detection Technology. Hazard Control Tunn. Undergr. Eng. 2020, 2, 1–12. (In Chinese) [Google Scholar]
- Lin, X.T.; Chen, X.; Su, D.; Han, K.; Zhu, M. An Analytical Model to Evaluate the Resilience of Shield Tunnel Linings Considering Multistage Disturbances and Recoveries. Tunn. Undergr. Sp. Technol. 2022, 127, 104581. [Google Scholar] [CrossRef]
- Xie, X.; Tang, G. Effects of Curved Shield Tunnelling Adjacent to Existing Power Tunnel. Eur. J. Environ. Civ. Eng. 2018, 22, s164–s178. [Google Scholar] [CrossRef]
- Zhou, J.; Xiao, H.; Jiang, W.; Bai, W.; Liu, G. Automatic Subway Tunnel Displacement Monitoring Using Robotic Total Station. Measurement 2020, 151, 107251. [Google Scholar] [CrossRef]
- Yi, C.; Lu, D.; Xie, Q.; Liu, S.; Li, H.; Wei, M.; Wang, J. Hierarchical Tunnel Modeling from 3D Raw LiDAR Point Cloud. Comput. Des. 2019, 114, 143–154. [Google Scholar] [CrossRef]
- Mu, B.; Xie, X.; Li, X.; Li, J.; Shao, C.; Zhao, J. Monitoring, Modelling and Prediction of Segmental Lining Deformation and Ground Settlement of an EPB Tunnel in Different Soils. Tunn. Undergr. Sp. Technol. 2021, 113, 103870. [Google Scholar] [CrossRef]
- Meniconi, S.; Capponi, C.; Frisinghelli, M.; Brunone, B. Leak Detection in a Real Transmission Main through Transient Tests: Deeds and Misdeeds. Water Resour. Res. 2021, 57, 1–15. [Google Scholar] [CrossRef]
- Brunone, B.; Maietta, F.; Capponi, C.; Keramat, A.; Meniconi, S. A Review of Physical Experiments for Leak Detection in Water Pipes through Transient Tests for Addressing Future Research. J. Hydraul. Res. 2022, 60, 894–906. [Google Scholar] [CrossRef]
- White, J.; Hurlebaus, S.; Shokouhi, P.; Wimsatt, A. Use of Ultrasonic Tomography to Detect Structural Impairment in Tunnel Linings: Validation Study and Field Evaluation. Transp. Res. Rec. 2014, 2407, 20–31. [Google Scholar] [CrossRef]
- White, J.B.; Wieghaus, K.T.; Karthik, M.M.; Shokouhi, P.; Hurlebaus, S.; Wimsatt, A. Nondestructive Testing Methods for Underwater Tunnel Linings: Practical Application at Chesapeake Channel Tunnel. J. Infrastruct. Syst. 2017, 23, B4016011. [Google Scholar] [CrossRef]
- Menendez, E.; Victores, J.G.; Montero, R.; Martínez, S.; Balaguer, C. Tunnel Structural Inspection and Assessment Using an Autonomous Robotic System. Autom. Constr. 2018, 87, 117–126. [Google Scholar] [CrossRef]
- Farahani, B.V.; Barros, F.; Sousa, P.J.; Tavares, P.J.; Moreira, P.M.G.P. A Railway Tunnel Structural Monitoring Methodology Proposal for Predictive Maintenance. Struct. Control Heal. Monit. 2020, 27, 1–15. [Google Scholar] [CrossRef]
- Du, L.; Zhong, R.; Sun, H.; Zhu, Q.; Zhang, Z. Study of the Integration of the CNU-TS-1 Mobile Tunnel Monitoring System. Sensors 2018, 18, 420. [Google Scholar] [CrossRef]
- Yao, L.; Zhang, S.; Wang, Z.; Sun, H.; Chen, Q.; Gilbert, K.M. Metro Gauge Inspection System Based on Mobile Laser Scanning Technology. Surv. Rev. 2020, 52, 531–543. [Google Scholar] [CrossRef]
- Huang, H.; Cheng, W.; Zhou, M.; Chen, J.; Zhao, S. Towards Automated 3D Inspection of Water Leakages in Shield Tunnel Linings Using Mobile Laser Scanning Data. Sensors 2020, 20, 6669. [Google Scholar] [CrossRef]
- Zhou, M.; Cheng, W.; Huang, H.; Chen, J. A Novel Approach to Automated 3D Spalling Defects Inspection in Railway Tunnel Linings Using Laser Intensity and Depth Information. Sensors 2021, 21, 5725. [Google Scholar] [CrossRef] [PubMed]
- Roca-Pardiñas, J.; Argüelles-Fraga, R.; de Asís López, F.; Ordóñez, C. Analysis of the Influence of Range and Angle of Incidence of Terrestrial Laser Scanning Measurements on Tunnel Inspection. Tunn. Undergr. Sp. Technol. 2014, 43, 133–139. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; Argüelles-Fraga, R. An Algorithm for Optimizing Terrestrial Laser Scanning in Tunnels. Autom. Constr. 2017, 83, 163–168. [Google Scholar] [CrossRef]
- Xie, X.; Lu, X. Development of a 3D Modeling Algorithm for Tunnel Deformation Monitoring Based on Terrestrial Laser Scanning. Undergr. Sp. 2017, 2, 16–29. [Google Scholar] [CrossRef]
- Xie, X.; Zhao, M.; He, J.; Zhou, B. Automatic and Visual Processing Method of Non-Contact Monitoring for Circular Stormwater Sewage Tunnels Based on LiDAR Data. Energies 2019, 12, 1599. [Google Scholar] [CrossRef]
- Xie, X.; Tian, H.; Zhou, B.; Li, K. The Life-Cycle Development and Cause Analysis of Large Diameter Shield Tunnel Convergence in Soft Soil Area. Tunn. Undergr. Sp. Technol. 2021, 107, 103680. [Google Scholar] [CrossRef]
- Xu, X.; Yang, H.; Neumann, I. A Feature Extraction Method for Deformation Analysis of Large-Scale Composite Structures Based on TLS Measurement. Compos. Struct. 2018, 184, 591–596. [Google Scholar] [CrossRef]
- Ye, G.; Bian, R.; Zhang, Q.; Pan, S.; Lin, T. Study on Deformation Safety Limit of Large-Diameter F-Shaped Pipe-Jacking Joint. Tunn. Constr. 2021, 41, 356–363. (In Chinese) [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entry | Technical Parameters |
|---|---|
| Distance accuracy | 1.2 mm + 10 ppm |
| Angular accuracy (horizontal/vertical) | 8″/8″ |
| Point accuracy | 3 mm @ 50 m 6 mm @ 100 m |
| Target acquisition accuracy | 2 mm @ 50 m |
| Dual-axis compensator | Real-time on-board liquid sensors, resolution 1″, compensation range ±5′, compensation accuracy 1.5″ |
| Scanning range and reflectivity | 120 m 8% 180 m 18% 270 m 34% |
| Scan Rate | 1,000,000 points per second |
| Field of view (horizontal/vertical) | 360°/290° |
| Type | Deformation Amount | Rotation Angle | Dislocation Amount | |||
|---|---|---|---|---|---|---|
| Maximum/mm | Location | Maximum/° | Location | Maximum/mm | Location | |
| 3D-LDC | 727 | Joint 132–133 | 7.23 | Joint 117–118 | 117 | Joint 117–118 |
| Vertical LDC | 681 | Joint 130–131 | 7.22 | Joint 117–118 | 111 | Joint 117–118 |
| Horizontal LDC | 367 | Joint 138–139 | 1.02 | Joint 118–119 | 37 | Joint 117–118 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, W.; Li, P.; Xie, X. A Novel Detection and Assessment Method for Operational Defects of Pipe Jacking Tunnel Based on 3D Longitudinal Deformation Curve: A Case Study. Sensors 2022, 22, 7648. https://doi.org/10.3390/s22197648
Lin W, Li P, Xie X. A Novel Detection and Assessment Method for Operational Defects of Pipe Jacking Tunnel Based on 3D Longitudinal Deformation Curve: A Case Study. Sensors. 2022; 22(19):7648. https://doi.org/10.3390/s22197648
Chicago/Turabian StyleLin, Wei, Pan Li, and Xiongyao Xie. 2022. "A Novel Detection and Assessment Method for Operational Defects of Pipe Jacking Tunnel Based on 3D Longitudinal Deformation Curve: A Case Study" Sensors 22, no. 19: 7648. https://doi.org/10.3390/s22197648
APA StyleLin, W., Li, P., & Xie, X. (2022). A Novel Detection and Assessment Method for Operational Defects of Pipe Jacking Tunnel Based on 3D Longitudinal Deformation Curve: A Case Study. Sensors, 22(19), 7648. https://doi.org/10.3390/s22197648