
Evaluating Autonomous Urban Perception and Planning in a 1/10th Scale MiniCity

Abstract
:1. Introduction
- 1.
- A small-scale multi-vehicle platform with scaled realistic assets, full implementation of AV stack and hardware;
- 2.
- A pipeline for evaluating the upstream and downstream performance of perception algorithms onboard miniature RACECARS;
- 3.
- Demonstration of the MiniCity’s evaluation capabilities for object detection and state estimation, using multiple hardware and software configurations
2. Related Work
2.1. Simulation
2.2. Datasets
2.3. Full-Scale Vehicle Platforms
2.4. Small-Scale Vehicle Platforms
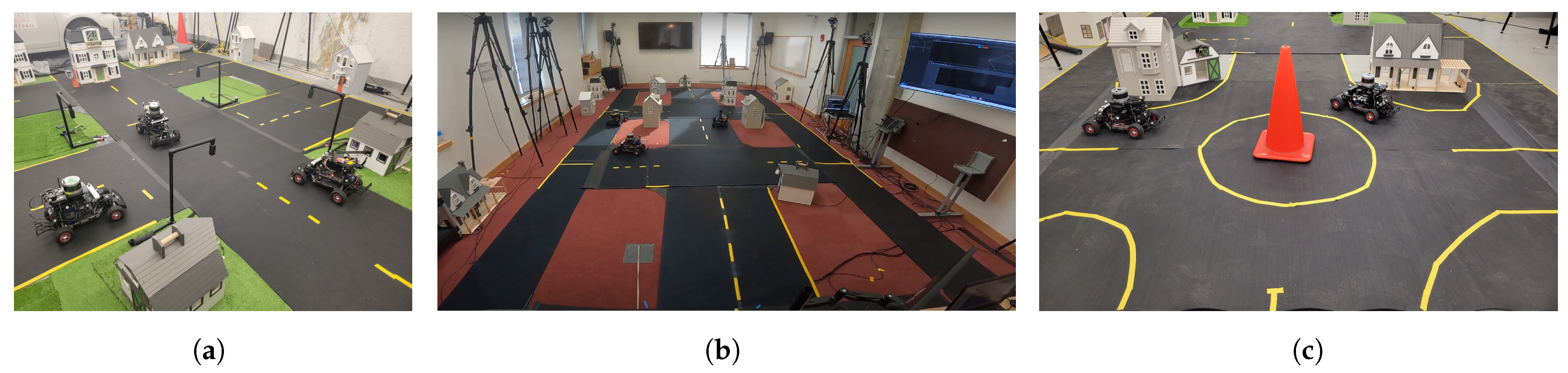
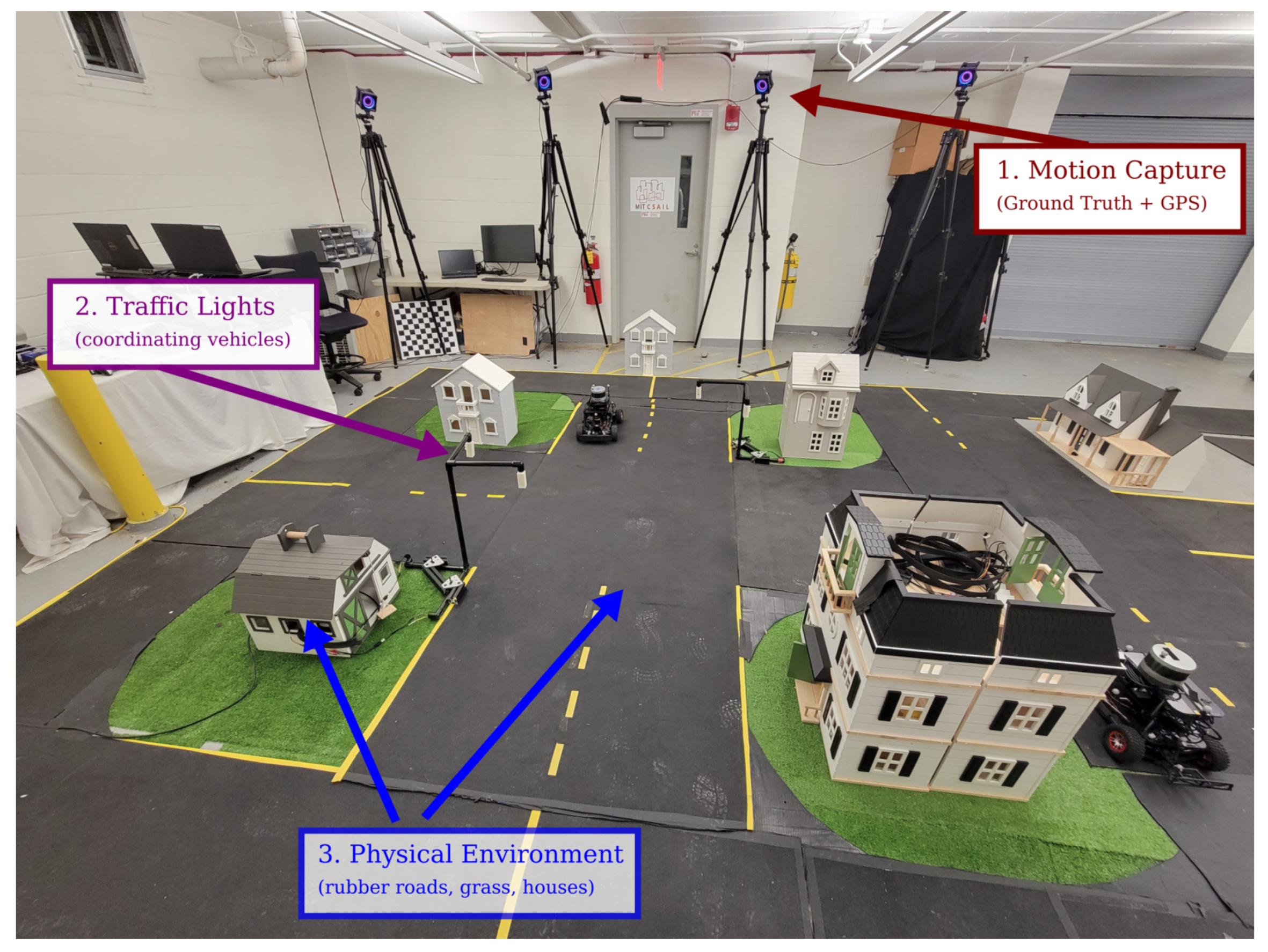
3. MiniCity Platform Description
3.1. Physical Layout
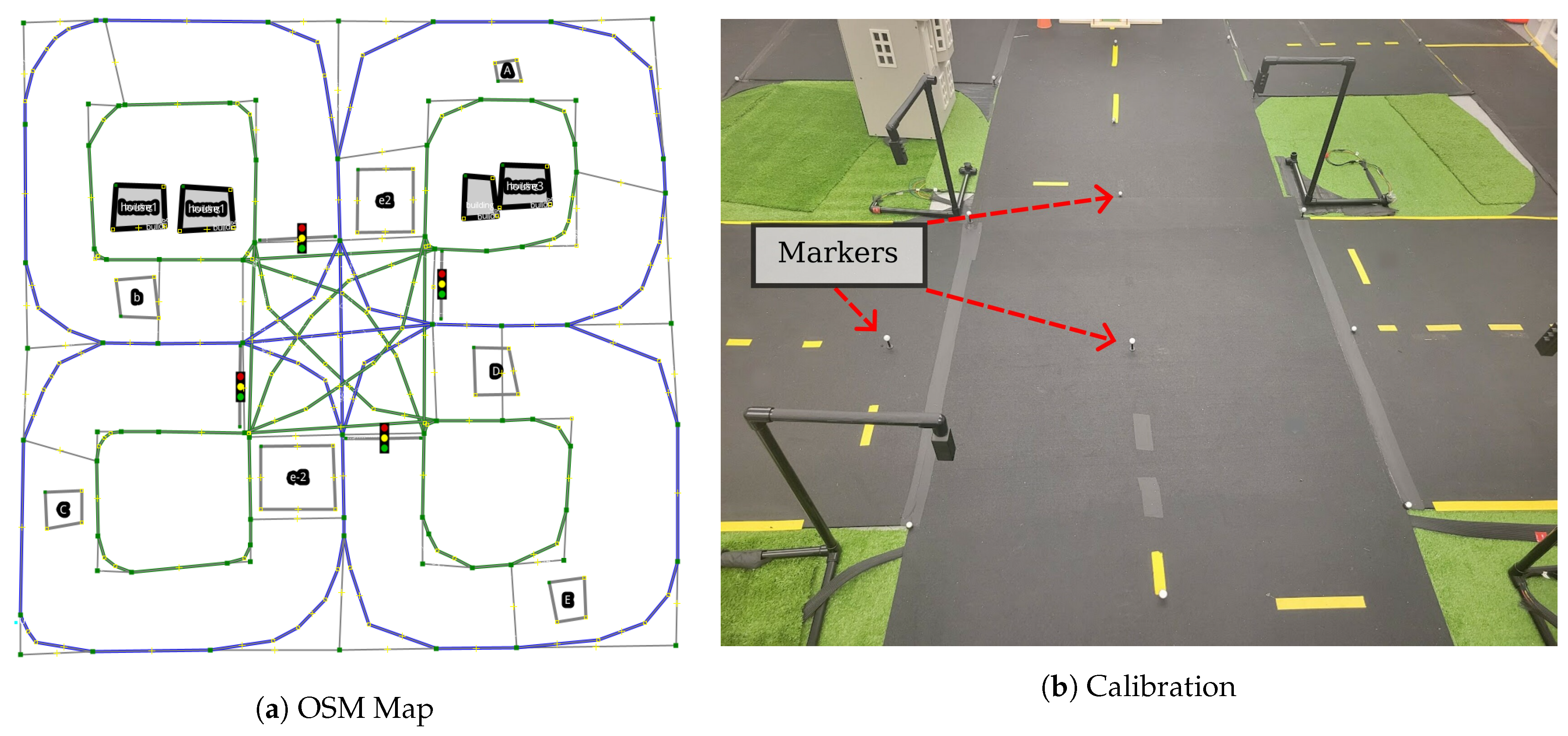
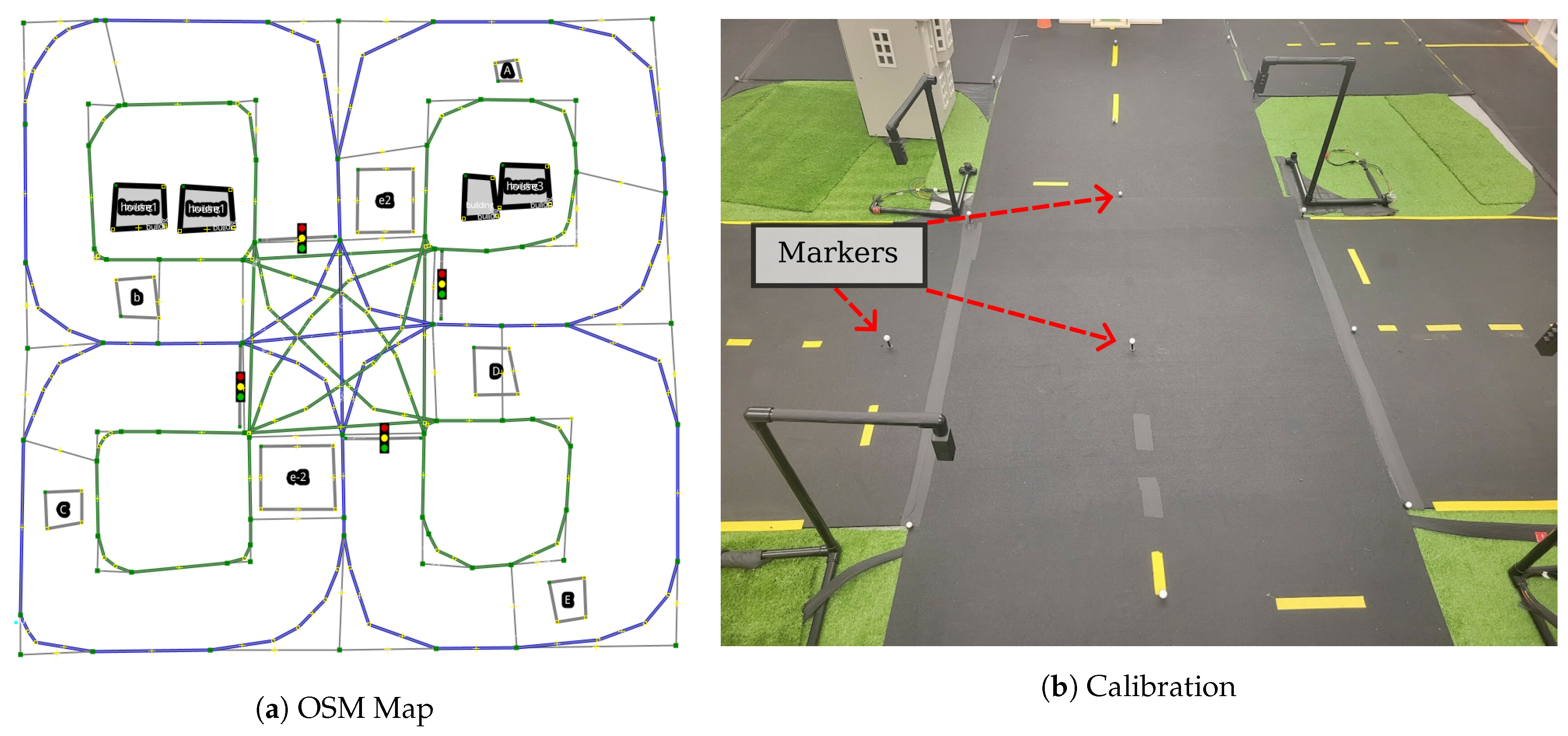
3.2. Ground Truth Position and GPS-Spoofing from Motion Capture
3.3. Mapping the MiniCity
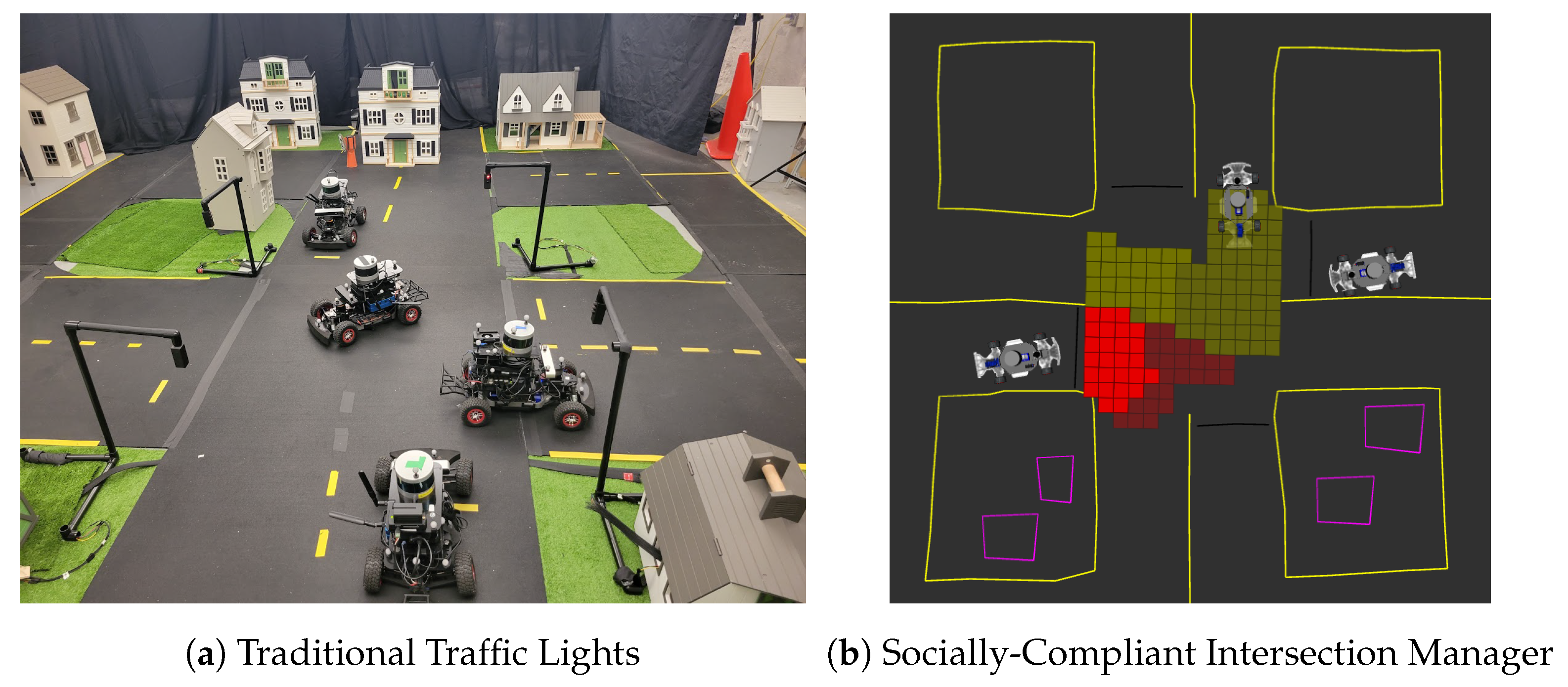
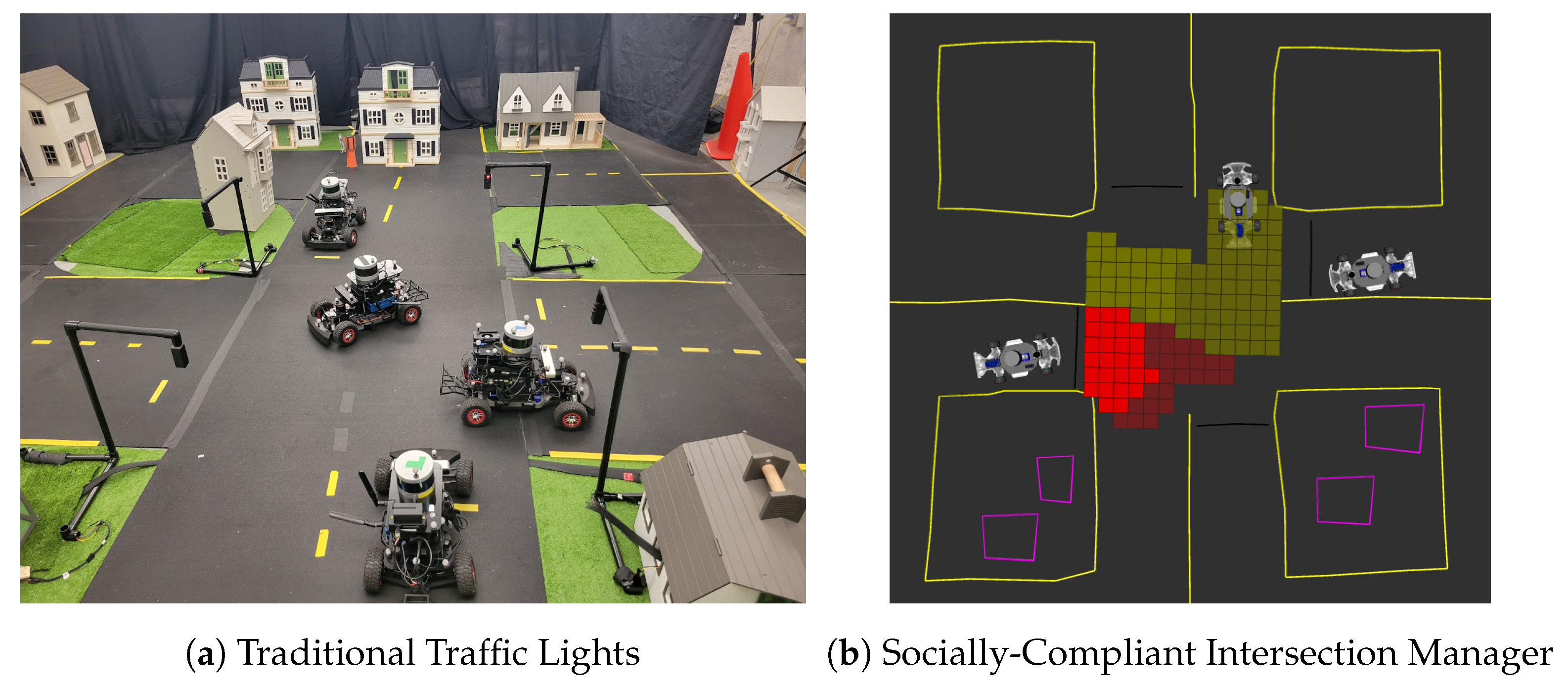
3.4. Scaled Traffic Lights and Houses
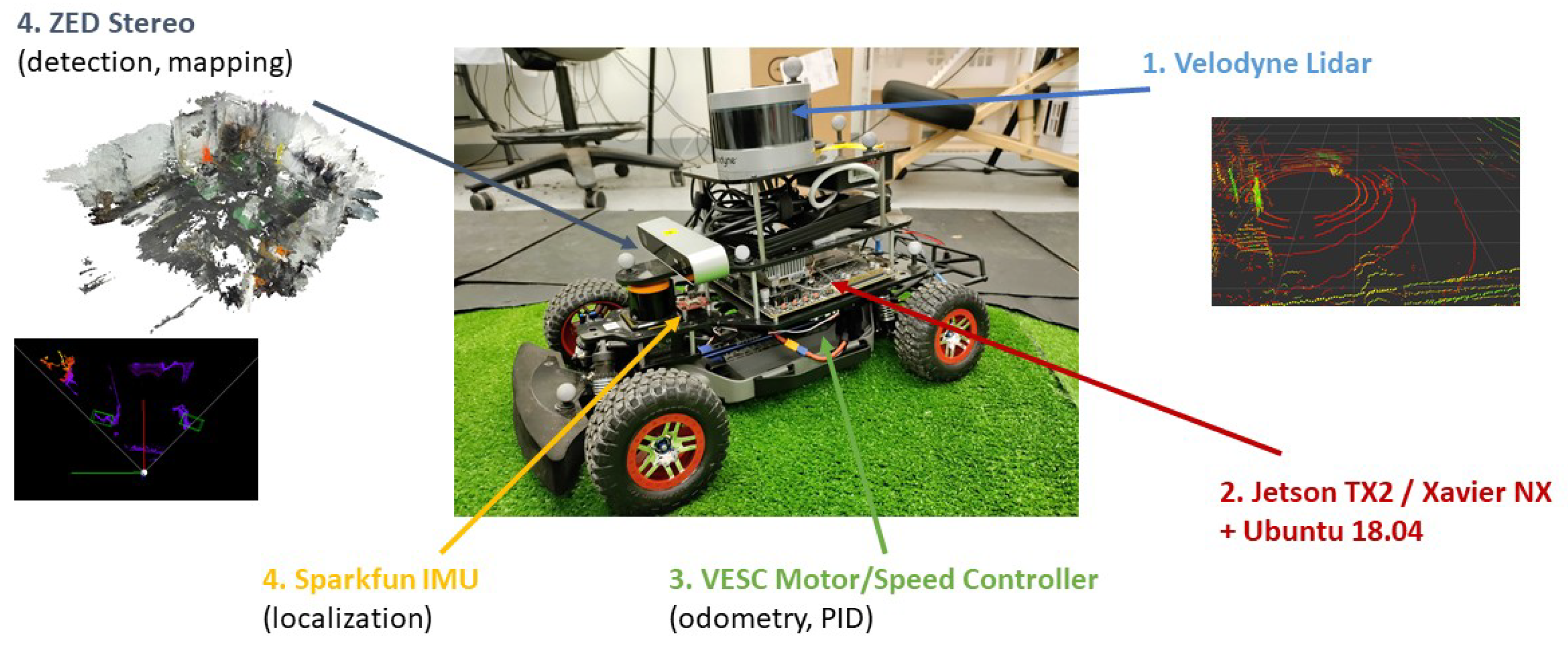
3.5. RACECAR Hardware
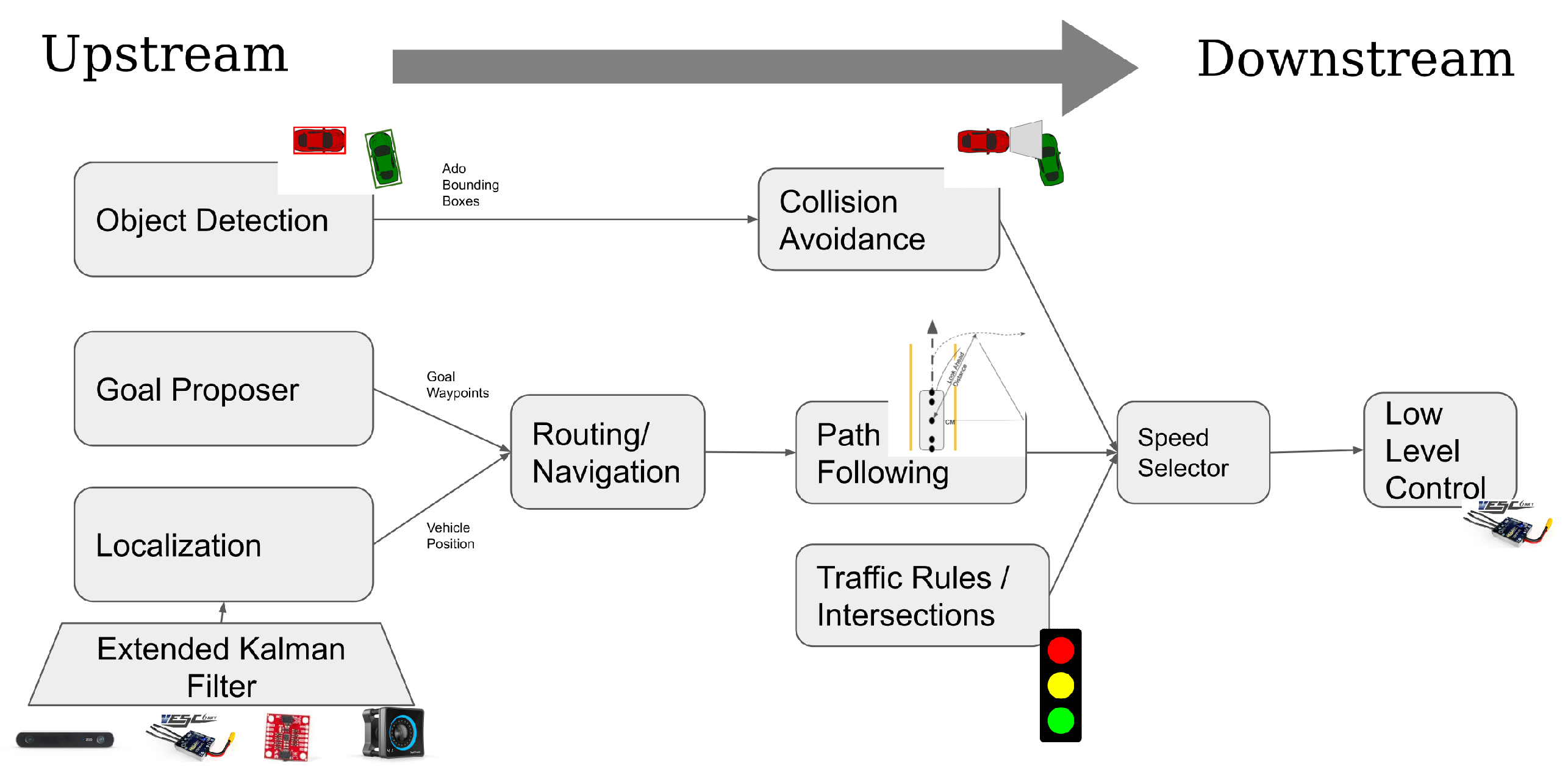
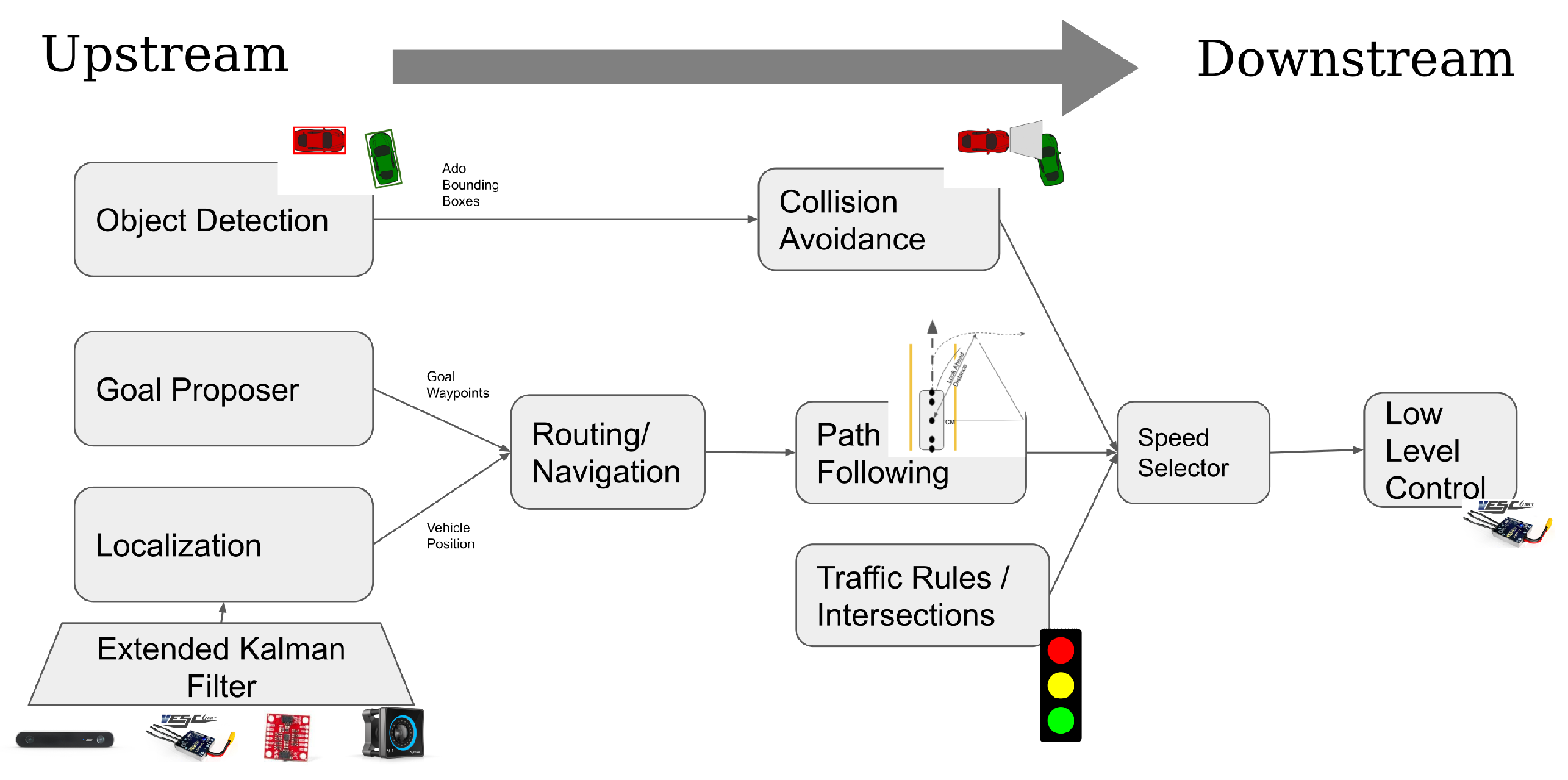
4. Evaluating Upstream and Downstream Perception Tasks
4.1. Upstream and Downstream Tasks
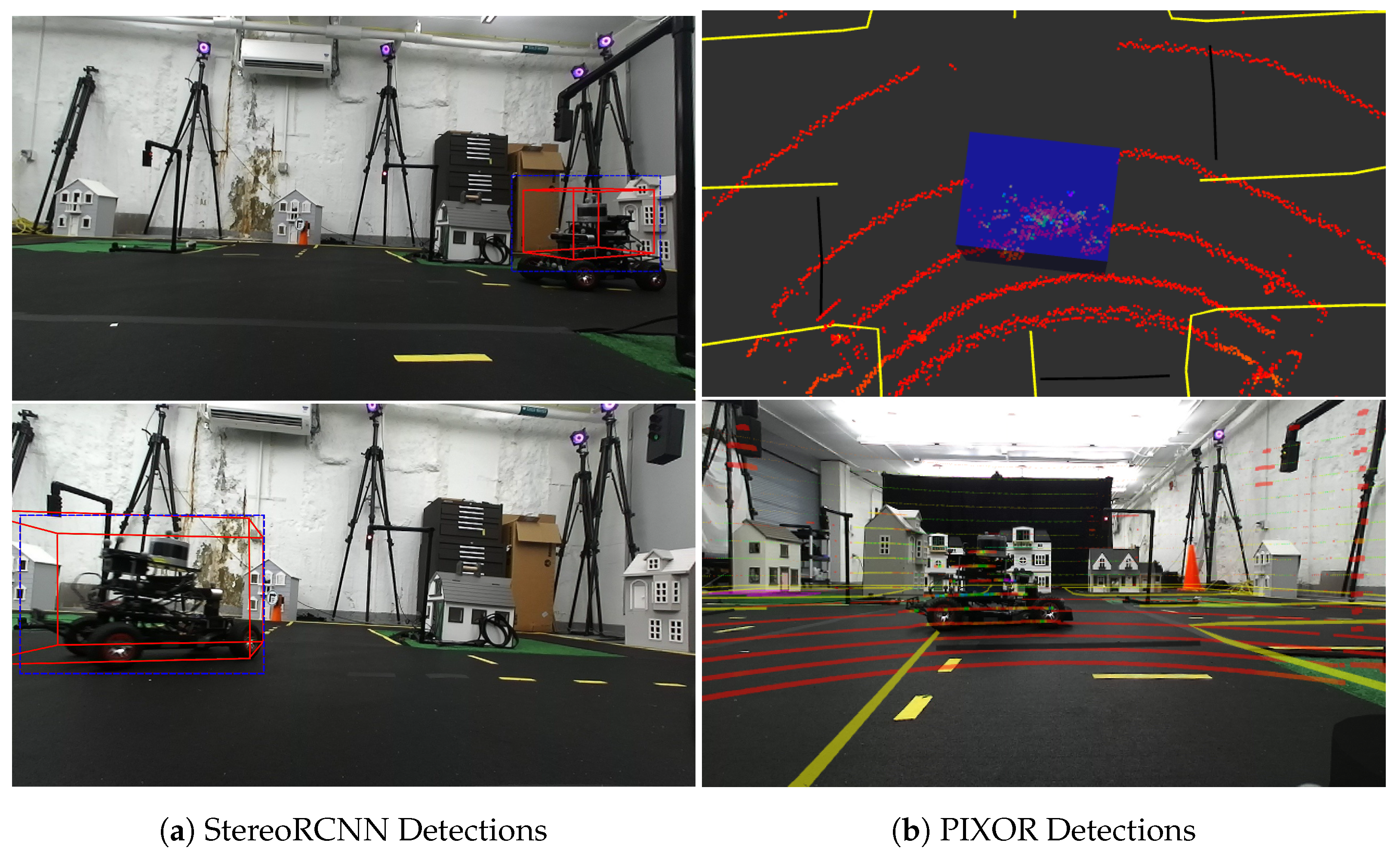
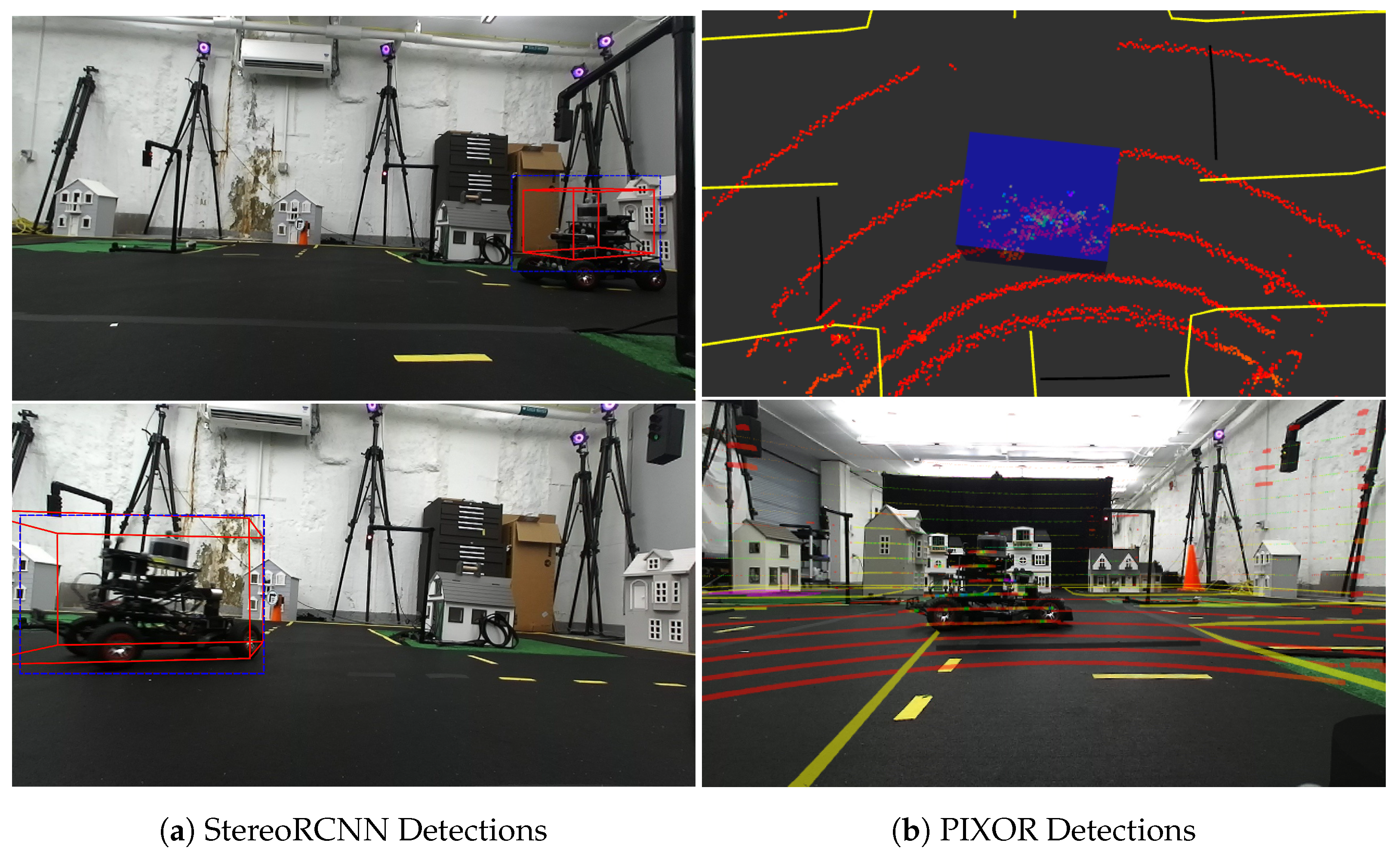
4.2. Object Detection
4.3. State Estimation
5. Perception Evaluation Results
5.1. Evaluating Object Detection
5.2. State Estimation
5.3. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, X.; Rosman, G.; Jasour, A.; McGill, S.G.; Leonard, J.J.; Williams, B.C. TIP: Task-Informed Motion Prediction for Intelligent Vehicles. arXiv 2021, arXiv:2110.08750. [Google Scholar] [CrossRef]
- Buhler, A.; Gaidon, A.; Cramariuc, A.; Ambrus, R.; Rosman, G.; Burgard, W. Driving Through Ghosts: Behavioral Cloning with False Positives. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5431–5437. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Urtasun, R. Are we ready for autonomous driving? The KITTI vision benchmark suite. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 3354–3361. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuScenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11621–11631. [Google Scholar]
- Chang, M.F.; Lambert, J.; Sangkloy, P.; Singh, J.; Bak, S.; Hartnett, A.; Wang, D.; Carr, P.; Lucey, S.; Ramanan, D.; et al. Argoverse: 3D tracking and forecasting with rich maps. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8740–8749. [Google Scholar] [CrossRef]
- Sun, P.; Kretzschmar, H.; Dotiwalla, X.; Chouard, A.; Patnaik, V.; Tsui, P.; Guo, J.; Zhou, Y.; Chai, Y.; Caine, B.; et al. Scalability in perception for autonomous driving: Waymo open dataset. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 2443–2451. [Google Scholar] [CrossRef]
- Geyer, J.; Kassahun, Y.; Mahmudi, M.; Ricou, X.; Durgesh, R.; Chung, A.S.; Hauswald, L.; Pham, V.H.; Mühlegg, M.; Dorn, S.; et al. A2D2: Audi Autonomous Driving Dataset. arXiv 2020, arXiv:2004.06320. [Google Scholar]
- Huang, X.; Wang, P.; Cheng, X.; Zhou, D.; Geng, Q.; Yang, R. The ApolloScape Open Dataset for Autonomous Driving and Its Application. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2702–2719. [Google Scholar] [CrossRef] [PubMed]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles. Springer Proc. Adv. Robot. 2018, 5, 621–635. [Google Scholar] [CrossRef]
- Müller, M.; Casser, V.; Lahoud, J.; Smith, N.; Ghanem, B. Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications. Int. J. Comput. Vis. 2018, 126, 902–919. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. Conf. Robot. Learn. 2017, 78, 1–16. [Google Scholar]
- Amini, A.; Gilitschenski, I.; Phillips, J.; Moseyko, J.; Banerjee, R.; Karaman, S.; Rus, D. Learning Robust Control Policies for End-to-End Autonomous Driving From Data-Driven Simulation. IEEE Robot. Autom. Lett. 2020, 5, 1143–1150. [Google Scholar] [CrossRef]
- O’kelly, M.; Zheng, H.; Karthik, D.; Mangharam, R.; Escalante, H.J.; Hadsell, R. F1TENTH: An Open-source Evaluation Environment for Continuous Control and Reinforcement Learning. Proc. Mach. Learn. Res. 2020, 123, 77–89. [Google Scholar]
- Balaji, B.; Mallya, S.; Genc, S.; Gupta, S.; Dirac, L.; Khare, V.; Roy, G.; Sun, T.; Tao, Y.; Townsend, B.; et al. DeepRacer: Autonomous Racing Platform for Experimentation with Sim2Real Reinforcement Learning. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 2746–2754. [Google Scholar] [CrossRef]
- Goldfain, B.; Drews, P.; You, C.; Barulic, M.; Velev, O.; Tsiotras, P.; Rehg, J.M. AutoRally: An Open Platform for Aggressive Autonomous Driving. IEEE Control Syst. 2019, 39, 26–55. [Google Scholar] [CrossRef]
- Paull, L.; Tani, J.; Ahn, H.; Alonso-Mora, J.; Carlone, L.; Cap, M.; Chen, Y.F.; Choi, C.; Dusek, J.; Fang, Y.; et al. Duckietown: An open, inexpensive and flexible platform for autonomy education and research. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 1497–1504. [Google Scholar] [CrossRef]
- Karaman, S.; Anders, A.; Boulet, M.; Connor, J.; Gregson, K.; Guerra, W.; Guldner, O.; Mohamoud, M.; Plancher, B.; Shin, R.; et al. Project-based, collaborative, algorithmic robotics for high school students: Programming self-driving race cars at MIT. In Proceedings of the 2017 IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 11 March 2017; pp. 195–203. [Google Scholar] [CrossRef]
- Buckman, N.; Hansen, A.; Karaman, S.; Rus, D. Sharing Intersection Control with Human Drivers in a 1/10th Miniature City. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Workshop on ‘Shared Autonomy in Physical Human-Robot Interaction: Adaptability and Trust’, Philadelphia, PA, USA, 23–27 May 2022; pp. 1–4. [Google Scholar]
- Buckman, N.; Pierson, A.; Schwarting, W.; Karaman, S.; Rus, D. Sharing is Caring: Socially-Compliant Autonomous Intersection Negotiation. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 6136–6143. [Google Scholar] [CrossRef]
- Gog, I.; Kalra, S.; Schafhalter, P.; Wright, M.A.; Gonzalez, J.E.; Stoica, I. Pylot: A Modular Platform for Exploring Latency-Accuracy Tradeoffs in Autonomous Vehicles. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 8806–8813. [Google Scholar] [CrossRef]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flotterod, Y.P.; Hilbrich, R.; Lucken, L.; Rummel, J.; Wagner, P.; Wiebner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar] [CrossRef]
- Amini, A.; Wang, T.H.; Gilitschenski, I.; Schwarting, W.; Liu, Z.; Han, S.; Karaman, S.; Rus, D. VISTA 2.0: An Open, Data-driven Simulator for Multimodal Sensing and Policy Learning for Autonomous Vehicles. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022. [Google Scholar]
- Briefs, U. Mcity Grand Opening. Res. Rev. 2015, 46, 1–3. [Google Scholar]
- Funke, J.; Theodosis, P.; Hindiyeh, R.; Stanek, G.; Kritatakirana, K.; Gerdes, C.; Langer, D.; Hernandez, M.; Müller-Bessler, B.; Huhnke, B. Up to the limits: Autonomous Audi TTS. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; pp. 541–547. [Google Scholar] [CrossRef]
- Naser, F.; Dorhout, D.; Proulx, S.; Pendleton, S.D.; Andersen, H.; Schwarting, W.; Paull, L.; Alonso-Mora, J.; Ang, M.H.; Karaman, S.; et al. A parallel autonomy research platform. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 933–940. [Google Scholar] [CrossRef]
- Burnett, K.; Schimpe, A.; Samavi, S.; Gridseth, M.; Liu, C.W.; Li, Q.; Kroeze, Z.; Schoellig, A.P. Building a winning self-driving car in six months. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9583–9589. [Google Scholar] [CrossRef]
- Williams, G.; Goldfain, B.; Drews, P.; Rehg, J.M.; Theodorou, E.A. Best Response Model Predictive Control for Agile Interactions between Autonomous Ground Vehicles. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2403–2410. [Google Scholar] [CrossRef]
- Pan, Y.; Cheng, C.A.; Saigol, K.; Lee, K.; Yan, X.; Theodorou, E.A.; Boots, B. Agile Autonomous Driving using End-to-End Deep Imitation Learning. In Proceedings of the Robotics: Science and Systems, Pittsburgh, PA, USA, 26–30 June 2018. [Google Scholar] [CrossRef]
- Poggenhans, F.; Pauls, J.H.; Janosovits, J.; Orf, S.; Naumann, M.; Kuhnt, F.; Mayr, M. Lanelet2: A high-definition map framework for the future of automated driving. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1672–1679. [Google Scholar] [CrossRef]
- Coulter, R.C. Implementation of the Pure Pursuit Path Tracking Algorithm; Technical Report; Carnegie Mellon University: Pittsburgh, PA, USA, 1992. [Google Scholar]
- Li, P.; Chen, X.; Shen, S. Stereo R-CNN based 3D object detection for autonomous driving. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 7636–7644. [Google Scholar] [CrossRef]
- Yang, B.; Luo, W.; Urtasun, R. PIXOR: Real-time 3D Object Detection from Point Clouds. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7652–7660. [Google Scholar] [CrossRef]
- Moore, T.; Stouch, D. A generalized extended Kalman filter implementation for the robot operating system. Adv. Intell. Syst. Comput. 2016, 302, 335–348. [Google Scholar] [CrossRef]
- Huynh, D.Q. Metrics for 3D rotations: Comparison and analysis. J. Math. Imaging Vis. 2009, 35, 155–164. [Google Scholar] [CrossRef]
- Verma, R.; Del Vecchio, D.; Fathy, H.K. Development of a scaled vehicle with longitudinal dynamics of an HMMWV for an ITS testbed. IEEE/ASME Trans. Mechatron. 2008, 13, 46–57. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Detections | Handovers | Collision Avoidance | ||
|---|---|---|---|---|---|
| Recall | Precision | per min | Sensitivity | Specificity | |
| Ground Truth | - | - | 0.00 | 0.89 | 0.98 |
| StereoRCNN [31] | 0.061 | 0.091 | 2.05 | 0.16 | 0.93 |
| PIXOR [32] | 0.442 | 0.559 | 0.39 | 0.80 | 0.73 |
| Position Error | Angular Error | |||||
|---|---|---|---|---|---|---|
| Sensor | Mean | Stdv. | Change | Mean | Stdv. | Change |
| Configuration | (m) | (m) | (%) | (-) | (-) | (%) |
| All Sensors | 0.1465 | 0.013 | - | 0.1458 | 0.016 | - |
| No Zed/GPS | 0.1757 | 0.029 | 19.94 | 0.1445 | 0.012 | −0.91 |
| No Zed | 0.1465 | 0.013 | −0.04 | 0.1445 | 0.012 | −0.87 |
| No GPS | 0.2152 | 0.086 | 46.90 | 0.1445 | 0.015 | −0.89 |
| No IMU | 0.1468 | 0.014 | 0.18 | 0.1513 | 0.021 | 3.74 |
| No linear IMU | 0.1464 | 0.013 | −0.09 | 0.1484 | 0.018 | 1.78 |
| IMU + Encoder Only | 0.1742 | 0.027 | 18.86 | 0.1459 | 0.013 | 0.06 |
| Sensor | Frequency of Line Violation | Severity of Line Violation |
|---|---|---|
| Configuration | (% of Run Duration) | (% of Car Body over Line) |
| GPS + IMU + Encoder | 10.3 | 2.7 |
| GPS-Only | 23.3 | 6.3 |
| IMU + Encoder Only | 35.4 | 16.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buckman, N.; Hansen, A.; Karaman, S.; Rus, D. Evaluating Autonomous Urban Perception and Planning in a 1/10th Scale MiniCity. Sensors 2022, 22, 6793. https://doi.org/10.3390/s22186793
Buckman N, Hansen A, Karaman S, Rus D. Evaluating Autonomous Urban Perception and Planning in a 1/10th Scale MiniCity. Sensors. 2022; 22(18):6793. https://doi.org/10.3390/s22186793
Chicago/Turabian StyleBuckman, Noam, Alex Hansen, Sertac Karaman, and Daniela Rus. 2022. "Evaluating Autonomous Urban Perception and Planning in a 1/10th Scale MiniCity" Sensors 22, no. 18: 6793. https://doi.org/10.3390/s22186793
APA StyleBuckman, N., Hansen, A., Karaman, S., & Rus, D. (2022). Evaluating Autonomous Urban Perception and Planning in a 1/10th Scale MiniCity. Sensors, 22(18), 6793. https://doi.org/10.3390/s22186793