
A Method of Calibration for the Distortion of LiDAR Integrating IMU and Odometer
 ,
,
Abstract
:1. Introduction
2. Causes of LiDAR Motion Distortion
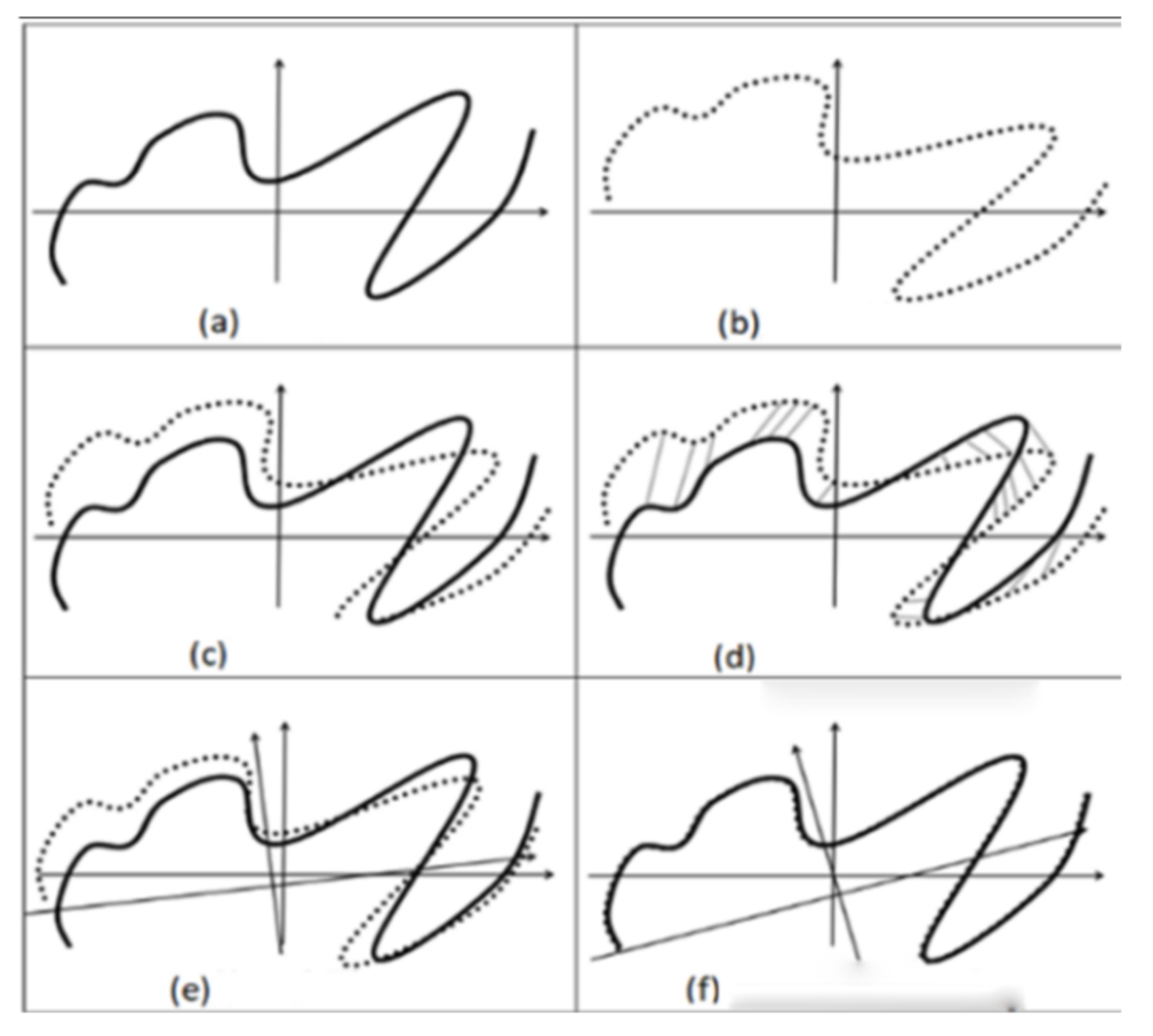
3. Principle of ICP Algorithm
4. Estimation Speed Scan Matching Algorithm Based on IMU and Odometer
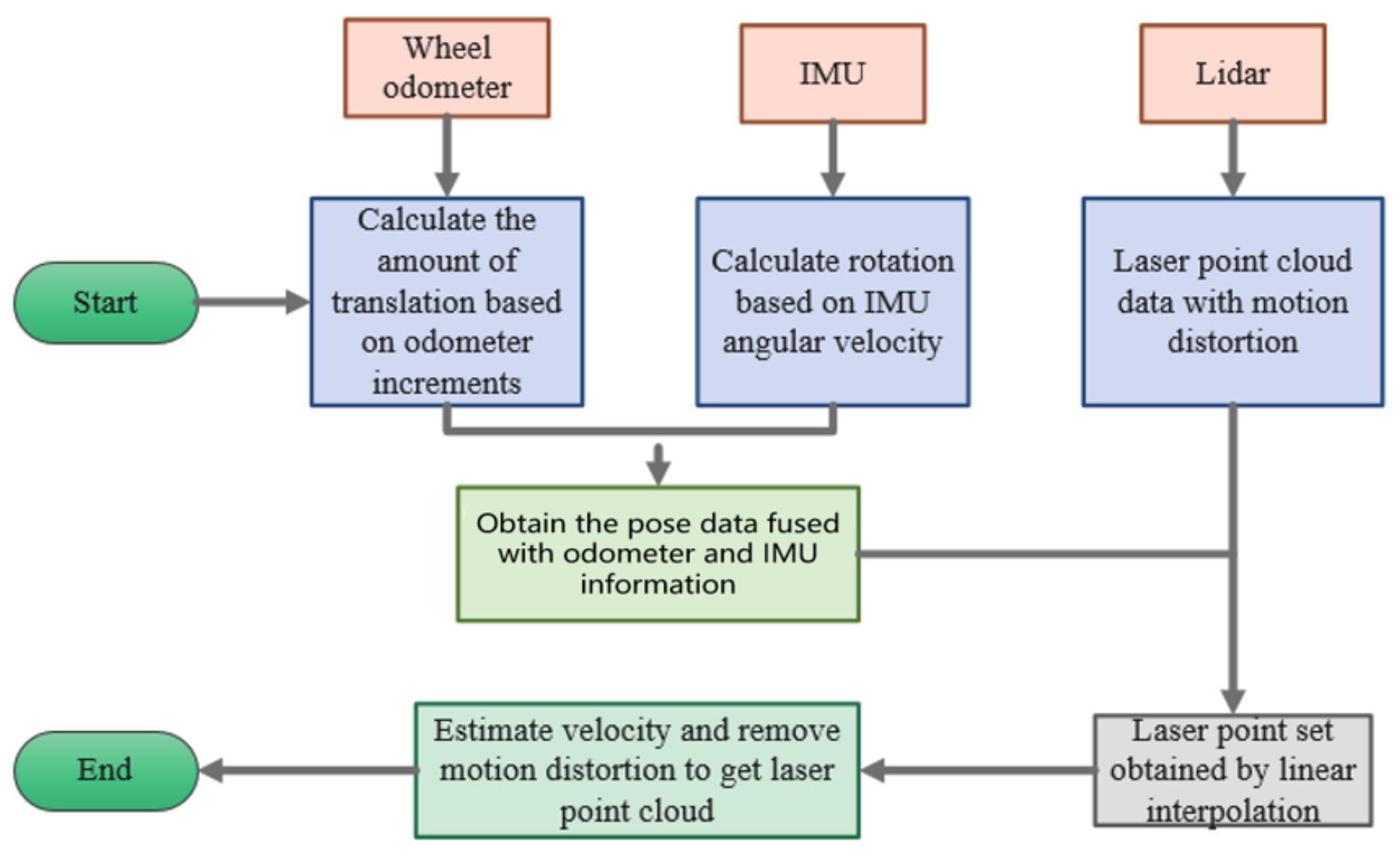
4.1. Pose Estimation with Fusion of IMU and Odometer
| Algorithm 1: A Pose Estimation Algorithm Based on IMU and Odometer |
| Input: Odometer pose queue , IMU pose queue, and laser pose queue |
| Output: laser pose queue |
| 1: for i = 1:n do 2: ; ; ; //fuse the data of odometer and IMU pose queue, then put into 3: end for 4: ; ; ; //Perform linear interpolation on the fusion pose of the start, end and intermediate moments, () is function used to make linear interpolation 5: ; //Substitute , , into above formula in order, and the coefficients of quadratic curve functions A, B, C can be solved. 6: for i = 1:n do 7: ; //solve the pose of each laser point in global coordinate system 8: = = ; //obtain the pose of each laser point in the global coordinate system 9: //compose a new laser point set 10: end for |
4.2. Estimated Velocity and Laser Data Pose Compensation
| Algorithm 2: Estimating velocity and removing motion distortion from laser point cloud data combined with ICP |
| Input: the queue of laser pose |
| Output: motion transformation matrix of adjacent laser frames T |
| 1: //speed initialization 2: 3: //the motion transformation matrix T is estimated by the speed of the two adjacent frames of laser light 4: //traverse all laser points in the current laser frame 5: //calculate the motion transformation matrix of each laser point 6: //Motion transformation for each laser point 7: end for 8: //iterative matching via ICP 9: //renew the value of velocity 10: //do the next round of speed estimation 11: //when the speed error value is greater than the threshold e, execute the loop |
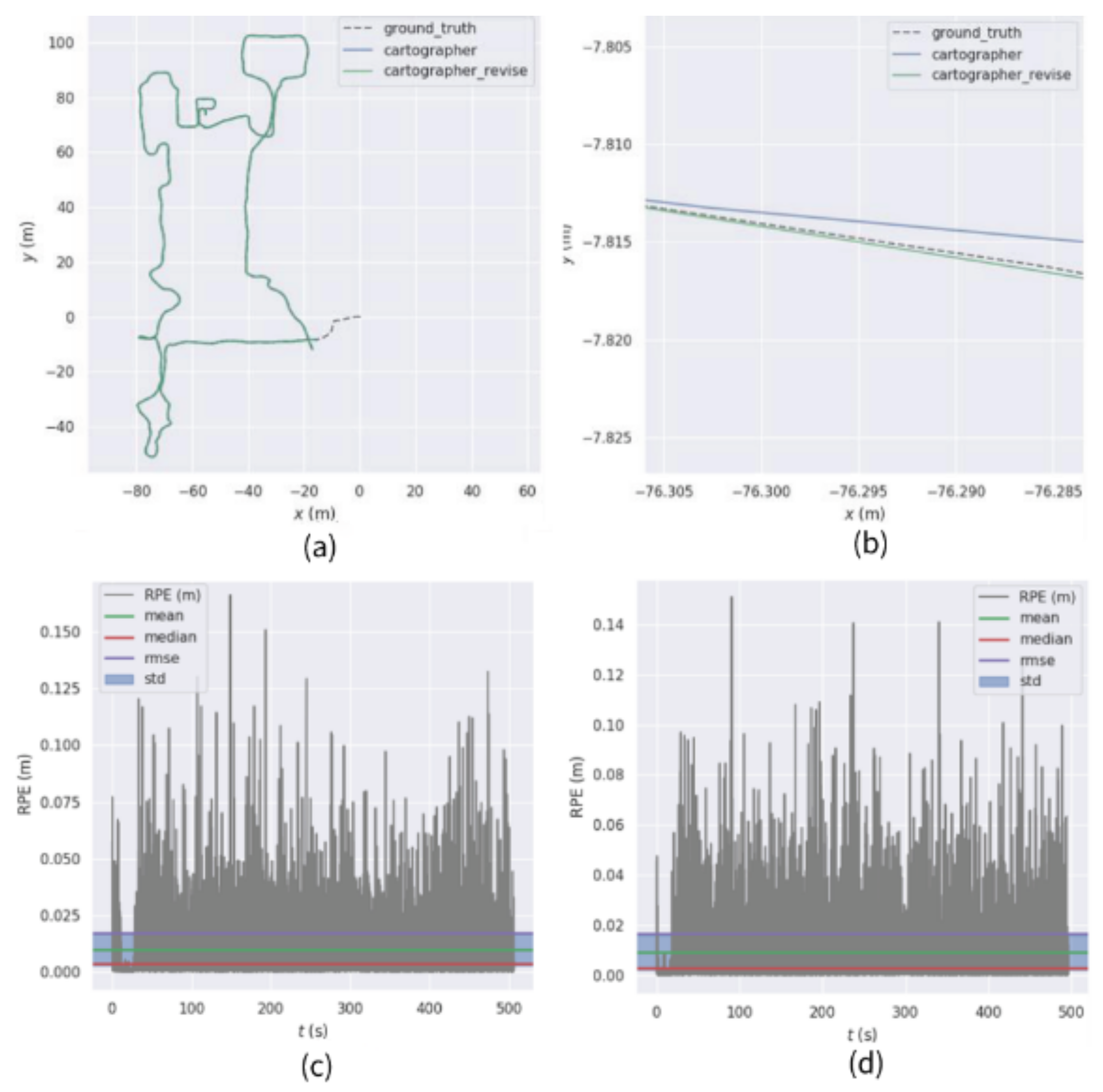
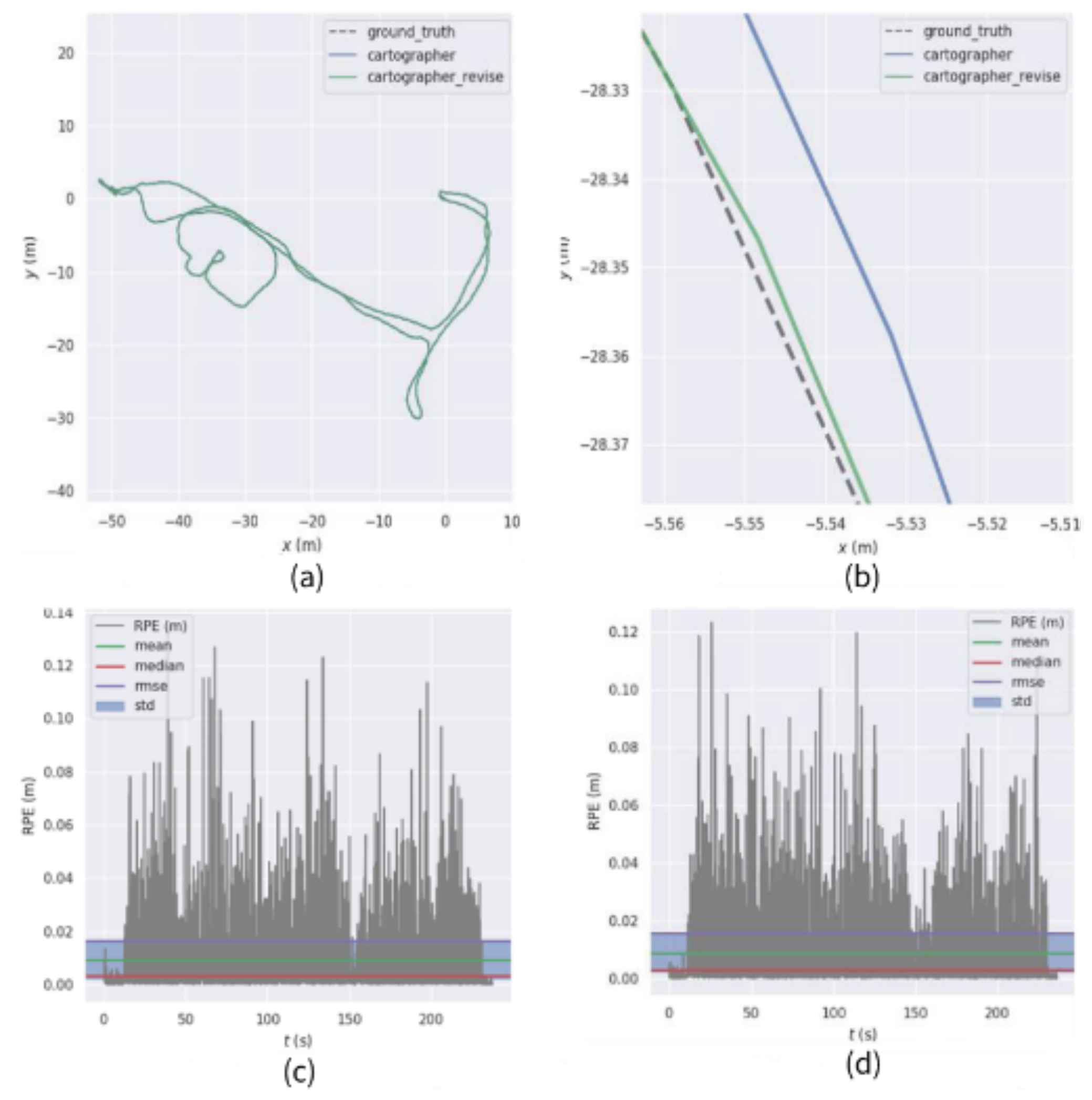
5. Positioning Accuracy Evaluation of Laser Odometry after Motion Distortion Calibration
6. Physical Experiment Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, P.; Shengze, W.; Michael, K. π-SLAM:LiDAR Smoothing and Mapping With Planes. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation, Xi’an, China, 19–22 November 2021; pp. 5751–5757. [Google Scholar]
- Rui, H.; Yi, Z. High Adaptive LiDAR Simultaneous Localization and Mapping. J. Univ. Electron. Sci. Technol. China 2021, 50, 52–58. [Google Scholar]
- Xin, L.I.; Xunyu, Z.; Xiafu, P.; Zhaohui, G.; Xungao, Z. Fast ICP-SLAM Method Based on Multi-resolution Search and Multi-density Point Cloud Matching. Robot 2020, 42, 583–594. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LI-DAR SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- David, J.Y.; Haowei, Z.; Mona, G.; Hugues, T.; Timothy, D.B. Unsupervised Learning of LiDAR Features for Use in a Probabilistic Trajectory Estimator. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation, Xi’an, China, 19–22 November 2021; pp. 1154–1161. [Google Scholar]
- Jo, J.H.; Moon, C.-b. Development of a Practical ICP Outlier Rejection Scheme for Graph-based SLAM Using a Range Finder. Korean Soc. Precis. Eng. 2019, 20, 1735–1745. [Google Scholar] [CrossRef]
- Xue, H.; Fu, H.; Dai, B. IMU-aided high-frequency LiDAR odometry for autonomous driving. Appl. Sci. 2019, 9, 1506. [Google Scholar] [CrossRef]
- Bezet, O.; Cherfaoui, V. Time error correction for range scanner data. In Proceedings of the International Conference on Information Fusion, New York, NY, USA, 10–13 July 2006. [Google Scholar]
- Hong, S.; Ko, H.; Kim, J. VICP:velocity updating iterative closest point algorithm. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 1893–1898. [Google Scholar]
- Zhang, J.; Singh, S. Low-drift and real-time LiDAR odometry and mapping. Auton Robot. 2017, 41, 401–406. [Google Scholar] [CrossRef]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-squares fitting of two 3-D point sets. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 698–700. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiaohui, J.; Wenfeng, X.; Jinyue, L.; Tiejun, L. Solving method of LiDAR odometry based on IMU. J. Instrum. 2021, 42, 39–48. [Google Scholar]
- Xu, Z.; Zhi, W.; Can, C.; Zhixuan, W.; Renxin, H.; Jian, W. Design and Implementation of 2D LiDAR Positioning and Mapping System. Opt. Technol. 2019, 45, 596–600. [Google Scholar]
- Yokozuka, M.; Koide, K.; Oishi1, S.; Banno, A. LiTAMIN2: Ultra Light LiDAR-based SLAM using Geometric Approximation applied with KL-Divergence. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation, Xi’an, China, 19–22 November 2021; pp. 11619–11625. [Google Scholar]
- Liwei, L.; Xukang, Z.; Xiuhua, L.; Zijun, Z. Research on Map Evaluation of 2D SLAM Algorithm for Low-Cost Mobile Robots. Comput. Simul. 2021, 38, 291–295. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Algorithm | RMSE (m) | Average (m) | Maximum (m) | Minimum (m) |
|---|---|---|---|---|---|
| ① | Iao_ICP | 0.0179 | 0.0103 | 0.01356 | 0.0011 |
| Cartographer | 0.023 | 0.0147 | 0.01428 | 0.0024 | |
| ② | Iao_ICP | 0.0166 | 0.0091 | 0.1510 | 0.0008 |
| Cartographer | 0.0197 | 0.0096 | 0.1663 | 0.0011 | |
| ③ | Iao_ICP | 0.0158 | 0.0089 | 0.1233 | 0.0003 |
| Cartographer | 0.0193 | 0.0092 | 0.1349 | 0.0012 |
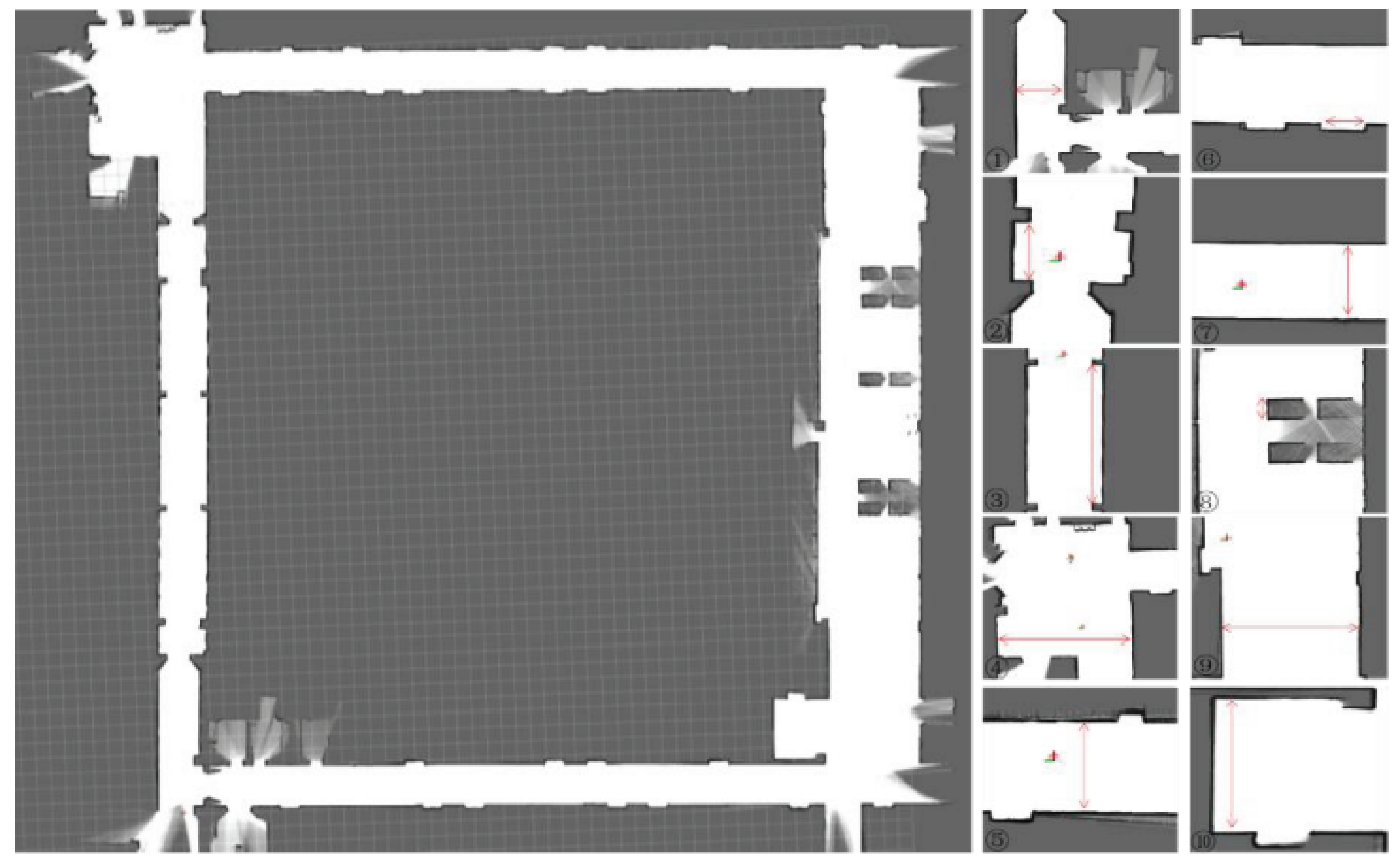
| Measuring Point | Measured Value (cm) | Figure Measured Values (cm) | Absolute Error (cm) | Relative Error (%) |
|---|---|---|---|---|
| 1 | 284.700 | 288.074 | −3.374 | −1.185107 |
| 2 | 195.000 | 186.400 | 8.600 | 4.410256 |
| 3 | 712.200 | 709.709 | 2.491 | 0.349761 |
| 4 | 812.000 | 803.200 | 8.800 | 1.083743 |
| 5 | 271.000 | 263.200 | 7.800 | 2.878228 |
| 6 | 136.300 | 130.840 | 5.460 | 4.005869 |
| 7 | 272.300 | 264.320 | 7.980 | 2.930591 |
| 8 | 76.500 | 85.895 | −9.395 | −12.281045 |
| 9 | 629.200 | 627.426 | 1.774 | 0.281945 |
| 10 | 402.700 | 397.230 | 5.470 | 1.358331 |
| Measuring Point | Measured Value (cm) | Figure Measured Values (cm) | Absolute Error (cm) | Relative Error (%) |
|---|---|---|---|---|
| 1 | 284.700 | 283.700 | 1.000 | 0.351246 |
| 2 | 195.000 | 197.540 | 3.460 | 1.774358 |
| 3 | 712.200 | 712.363 | −0.163 | −0.022886 |
| 4 | 812.000 | 819.340 | −7.340 | −0.903940 |
| 5 | 271.000 | 270.928 | 0.072 | 0.026568 |
| 6 | 136.300 | 133.549 | 2.751 | 2.018341 |
| 7 | 272.300 | 270.116 | 2.184 | 0.802056 |
| 8 | 76.500 | 77.744 | −1.244 | −1.626143 |
| 9 | 629.200 | 626.829 | 2.371 | 0.376827 |
| 10 | 402.700 | 404.365 | −1.665 | −0.413459 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Meng, Q.; Tian, Y.; Zhou, Z.; Luo, C.; Mao, W.; Zeng, P.; Zhang, B.; Luo, Y. A Method of Calibration for the Distortion of LiDAR Integrating IMU and Odometer. Sensors 2022, 22, 6716. https://doi.org/10.3390/s22176716
Wu Q, Meng Q, Tian Y, Zhou Z, Luo C, Mao W, Zeng P, Zhang B, Luo Y. A Method of Calibration for the Distortion of LiDAR Integrating IMU and Odometer. Sensors. 2022; 22(17):6716. https://doi.org/10.3390/s22176716
Chicago/Turabian StyleWu, Qiuxuan, Qinyuan Meng, Yangyang Tian, Zhongrong Zhou, Cenfeng Luo, Wandeng Mao, Pingliang Zeng, Botao Zhang, and Yanbin Luo. 2022. "A Method of Calibration for the Distortion of LiDAR Integrating IMU and Odometer" Sensors 22, no. 17: 6716. https://doi.org/10.3390/s22176716
APA StyleWu, Q., Meng, Q., Tian, Y., Zhou, Z., Luo, C., Mao, W., Zeng, P., Zhang, B., & Luo, Y. (2022). A Method of Calibration for the Distortion of LiDAR Integrating IMU and Odometer. Sensors, 22(17), 6716. https://doi.org/10.3390/s22176716