


Beamforming with 1 × N Conformal Arrays

 ,
,  , ,
, , 
Abstract
:1. Introduction
2. Theory of Beamforming Antennas on Changing Conformal Surfaces
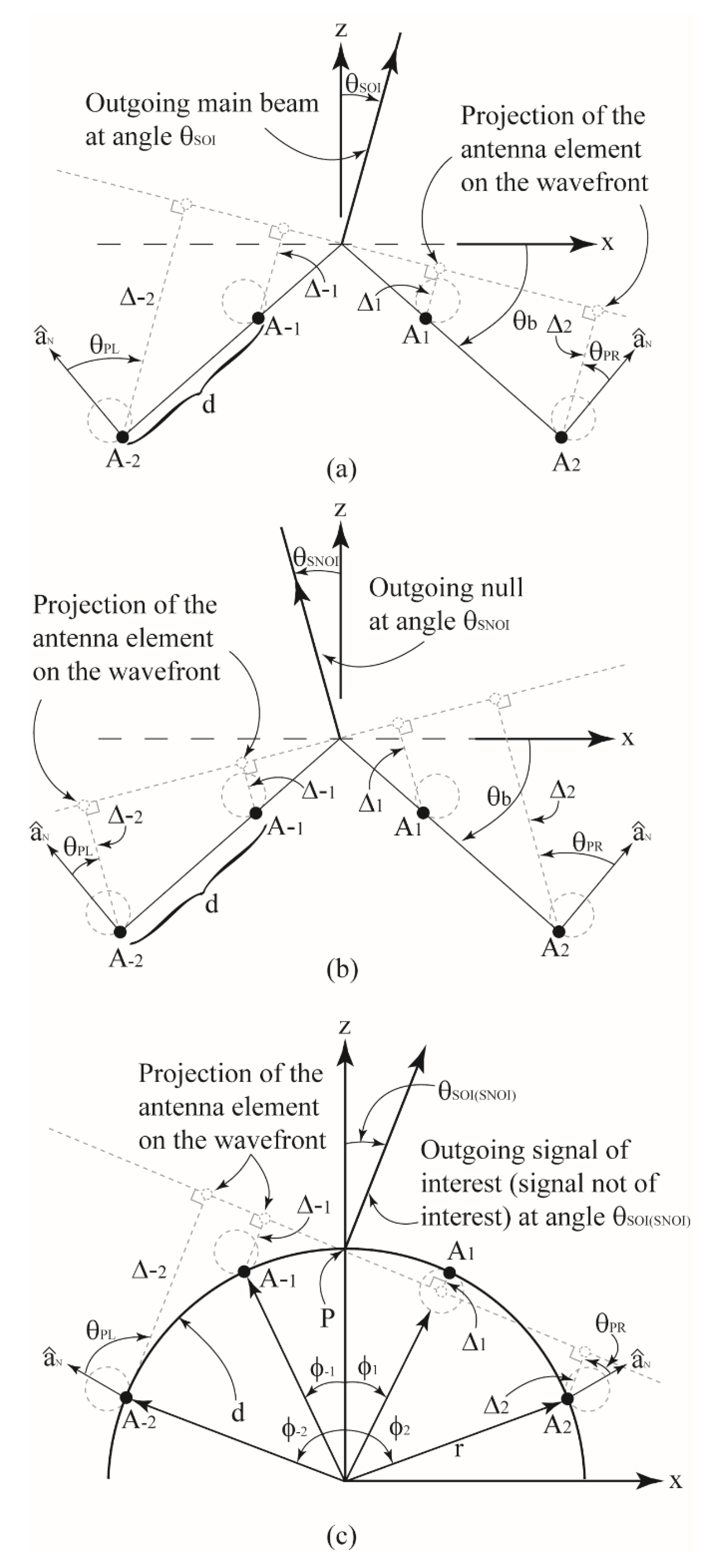
2.1. Beamforming of Antenna Array on a Singly Curved (Wedge Shaped) Surface
2.2. Computing the Distance to the Projected Elements on the Wave Front
2.2.1. Case 1: Computing for
2.2.2. Case 2: Computing for or
2.3. Computing the Radiation in the Direction of , , and
2.4. Computing the Array Weights for N = 4 Elements
2.5. Computing the Array Weights for N Elements
2.6. Beamforming of a 1 × 4 Array on a Cylindrical-Shaped Surface
2.6.1. Case 1:
2.6.2. Case 2:
2.7. Computing the Array Weights for N = 4 Elements
2.8. Computing the Array Weights for N Elements
2.9. Computing the Weighting Coefficients with Mutual Coupling
3. Validation with Analytical, Simulations and Measurement Results
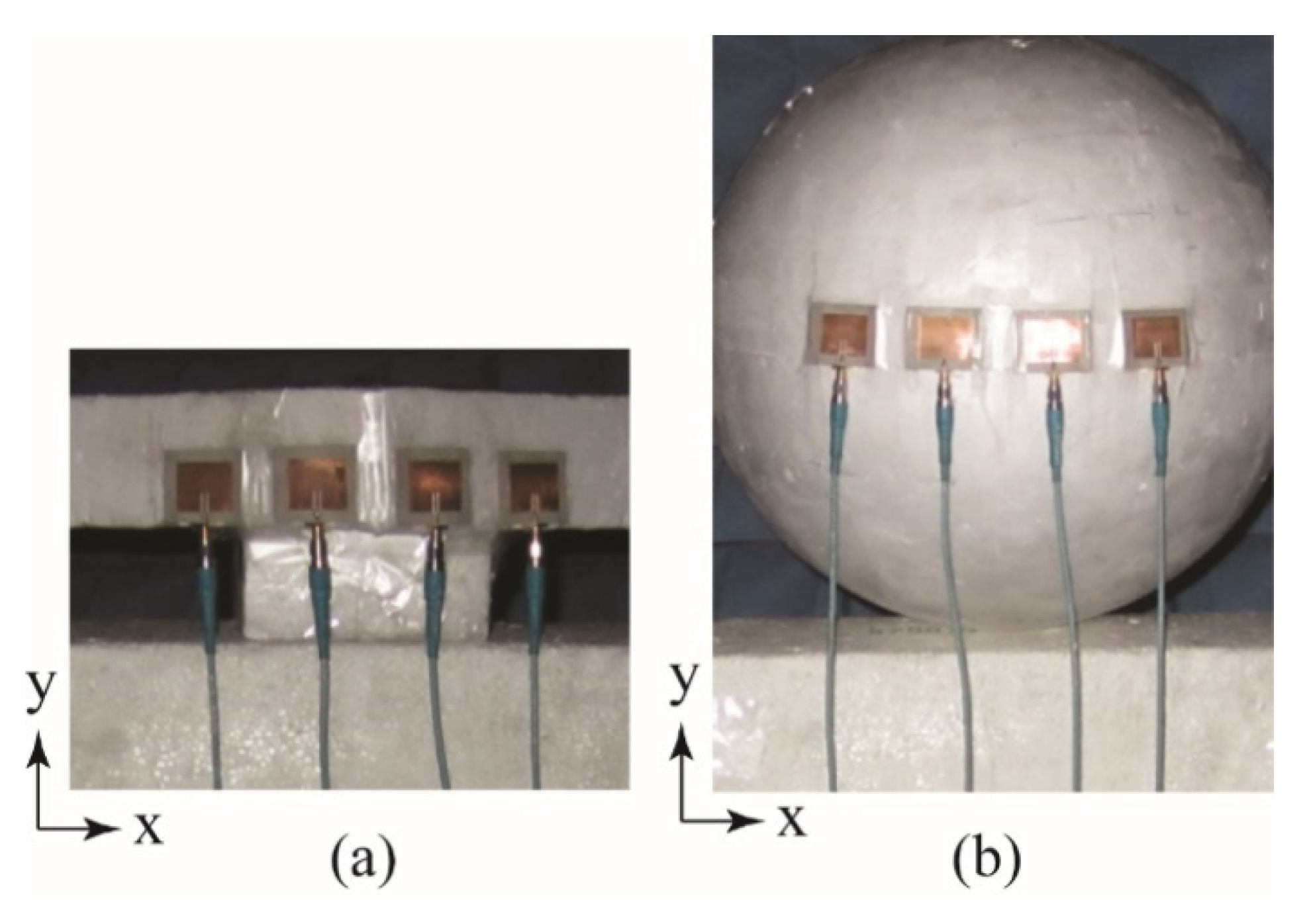
3.1. Four-Element Beamforming Array
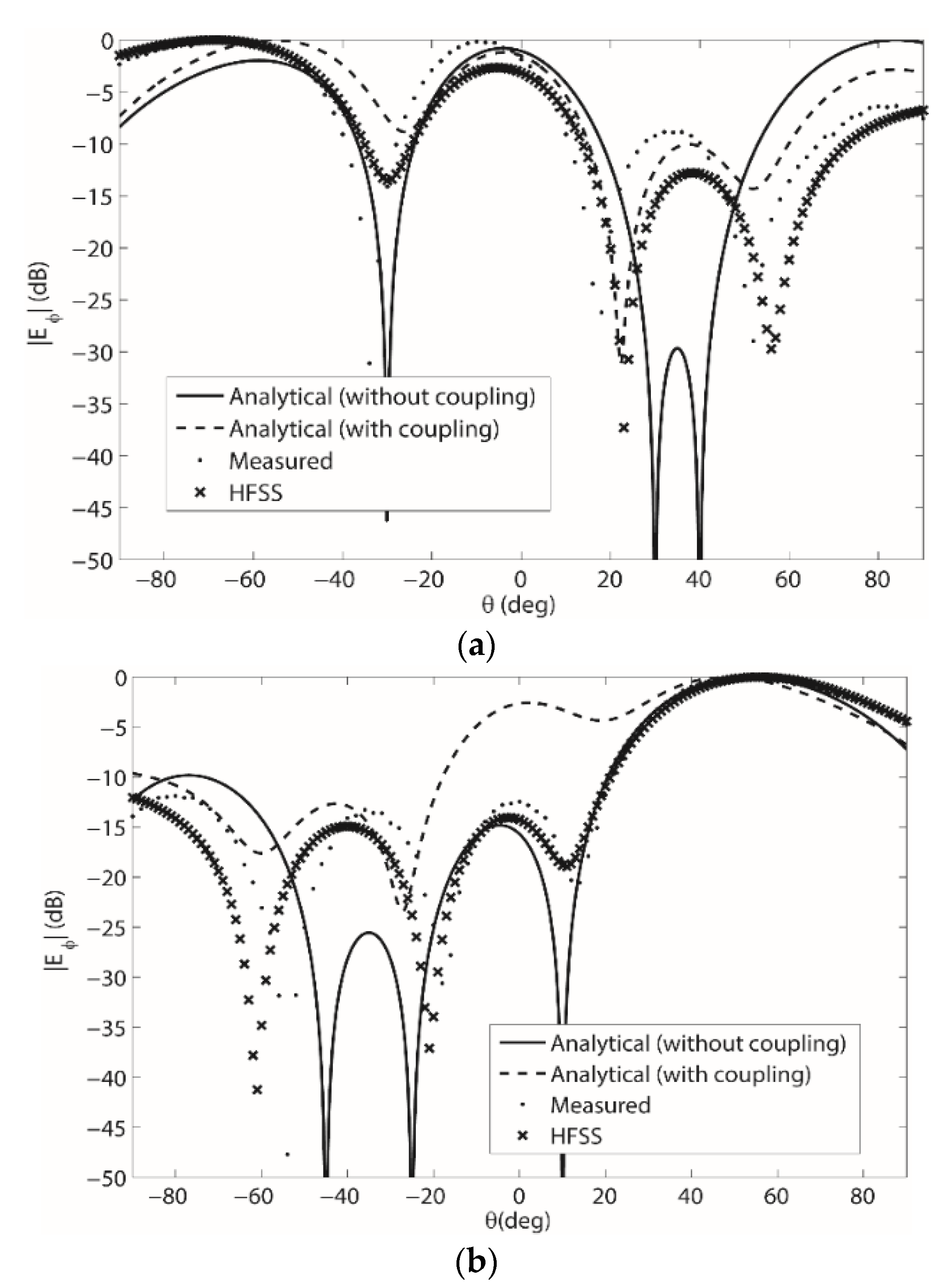
3.2. Beamforming Results on the Conformal Wedge Antenna Array with θb = 30°
3.3. Beamforming Results on the Conformal Wedge Antenna Array with θb = 45°
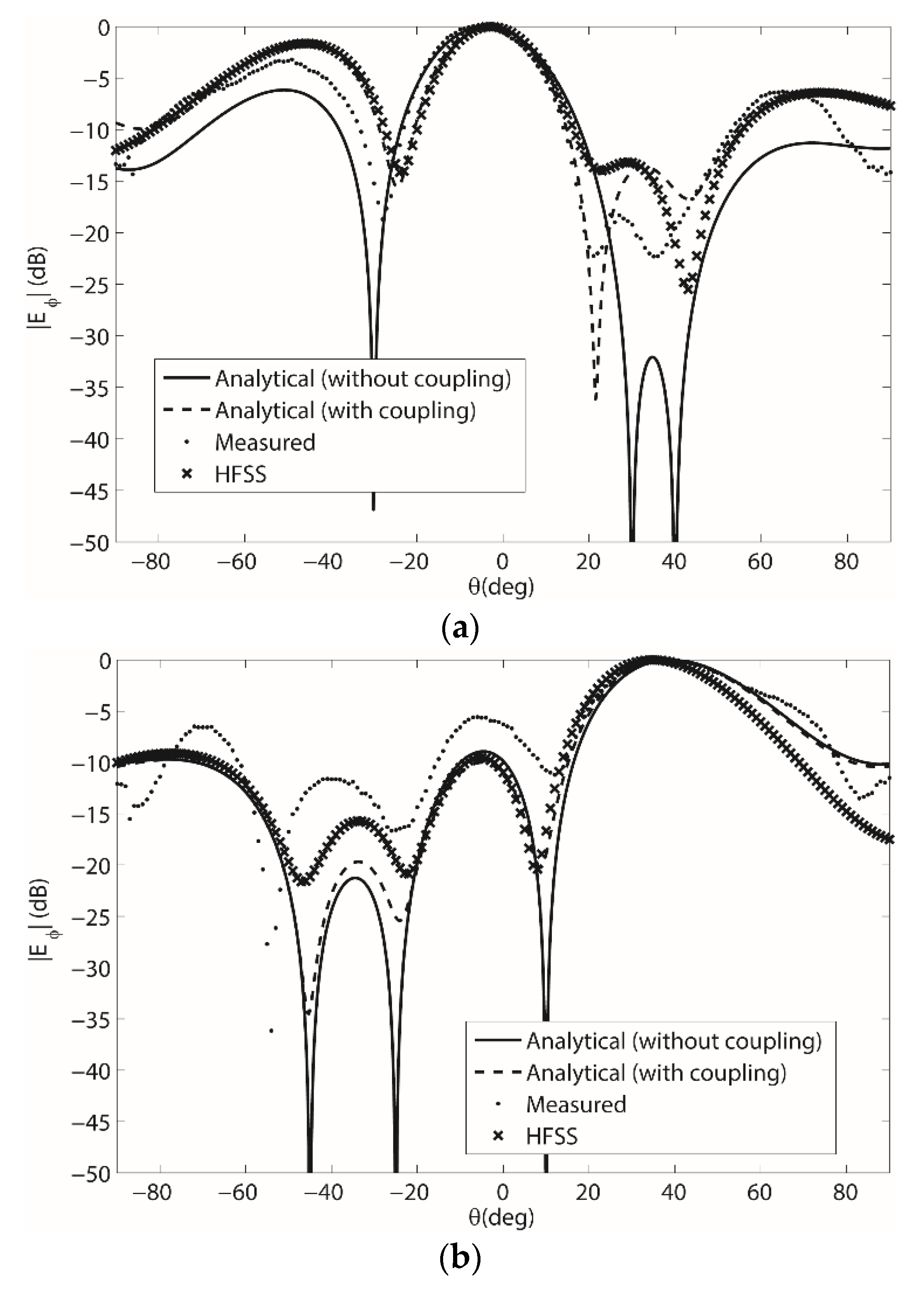
3.4. Beamforming Results on the Conformal Cylindrical Antenna Array with r = 10 cm
4. Discussions
5. Dependence of Complex Weights on the Geometry of the Conformal Surface
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern 1 Weights | Pattern 2 Weights |
|---|---|
| Pattern 1 Weights | Pattern 2 Weights |
|---|---|
| Pattern 1 Weights | Pattern 2 Weights |
|---|---|
| Pattern 1 Weights | Pattern 2 Weights |
|---|---|
| Pattern 1 Weights | Pattern 2 Weights |
|---|---|
| Pattern 1 Weights | Pattern 2 Weights |
|---|---|
References
- Balanis, C.A. Antenna Theory: Analysis and Design, 3rd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Lockyer, A.J.; Alt, K.H.; Coughlin, D.P.; Durham, M.D.; Kudva, J.N.; Goetz, A.C.; Tuss, J. Design and developement of a conformal load bearing smart skin antenna: Overiew of the AFRL smart skin structure technology demonstration (S3TD). In Proceedings of the 1999 Symposium on Smart Structures and Materials, Newport Beach, CA, USA, 1 March 1999; Volume 3674, p. 410. [Google Scholar]
- Bellofiore, S.; Balanis, C.; Foutz, J.; Spanias, A. Smart-antenna systems for mobile communication networks. Part 1. Overview and antenna design. IEEE Antennas Propag. Mag. 2003, 44, 145–154. [Google Scholar] [CrossRef]
- Balanis, C.A. Smart antennas for future reconfigurable wireless communication networks. In Proceedings of the 2003 IEEE Topical Conference on Wireless Communication Technology, Honolulu, HI, USA, 15–17 October 2003; pp. 181–182. [Google Scholar]
- Lockyer, A.J.; Alt, K.H.; Kinslow, R.W.; Kan, H.-P.; Goetz, A.C. Development of a structurally integrated Conformal load-bearing multifunction antenna: Overview of the Air Force Smart Skin Structures Technology Demonstration Program. Proc. SPIE 1996, 2722, 55–64. [Google Scholar]
- Varadan, V.K.; Varadan, V.V. Design and development of conformal smart spiral antenna. In Proceedings of the 1996 Symposium on Smart Structures and Materials, San Diego, CA, USA, 25–29 February 1996; Volume 2722, p. 46. [Google Scholar]
- Benedetti, M.; Azaro, R.; Massa, A. Experimental validation of full-adaptive smart antenna prototype. Elec. Lett. 2008, 44, 661–662. [Google Scholar] [CrossRef]
- Ohira, T. Electronically steerable passive array radiator antennas for low-cost analog adaptive beamforming. In Proceedings of the 2000 IEEE International Conference on Phased Array Systems and Technology, Dana Point, CA, USA, 21–25 May 2000; pp. 101–104. [Google Scholar]
- Choi, S.; Shim, D. A novel adaptive beamforming algorithm for a smart antenna system in a CDMA mobile communication environment. IEEE Trans. Veh. Technol. 2002, 49, 1793–1806. [Google Scholar] [CrossRef]
- Schippers, H.; Verpoorte, J.; Jorna, P.; Hulzinga, A.; Meijerink, A.; Roeloffzen, C.; Heideman, R.G.; Leinse, A.; Wintels, M. Conformal phased array with beamforming on airborne satellite communication. In Proceedings of the International ITG Workshop on Smart Antennas, Hamburg, Germany, 26–27 February 2008; pp. 343–350. [Google Scholar]
- Schippers, H.; Spalluto, G.; Vos, G. Radiation analysis of conformal phased array antennas on distorted structures. In Proceedings of the 12th International Conference on Antennas and Propagation (ICAP 2003), Exeter, UK, 31 March–3 April 2003; pp. 160–163. [Google Scholar]
- Schippers, H.; Knott, P.; Deloues, T. Vibrating antennas and compensation techniques research in NATO/RTO/SET 087/RTG 50. In Proceedings of the IEEE Aerospace Conference, New York, NY, USA, 3–10 March 2007; pp. 1–13. [Google Scholar]
- Knott, P. Deformation and vibration of conformal antenna arrays and compensation techniques. In Proceedings of the Meeting Proceedings RTO-MP-AVT-141, Neuilly-sur-Seine, France, October 2006; Multifunctional Structures/Integration of Sensors and Antennas. pp. 19-1–19-12. [Google Scholar]
- Wincza, K.; Gruszczynski, S. Influence of Curvature Radius on Radiation Patterns in Multibeam Conformal Antennas. In Proceedings of the 36th European Microwave Conference, Manchester, UK, 10–15 September 2006; pp. 1410–1413. [Google Scholar]
- Haupt, R.L. Antenna Arrays: A Computational Approach; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2010; pp. 287–315. [Google Scholar]
- Braaten, B.D.; Roy, S.; Nariyal, S.; Al Aziz, M.; Chamberlain, N.F.; Ullah, I.; Reich, M.T.; Anagnostou, D. A Self-Adapting Flexible (SELFLEX) Antenna Array for Changing Conformal Surface Applications. IEEE Trans. Antennas Propag. 2013, 61, 655–665. [Google Scholar] [CrossRef]
- O’Donovan, P.L.; Rudge, A.W. Adaptive control of a flexible linear array. Electron. Lett. 1973, 9, 121–122. [Google Scholar] [CrossRef]
- Lier, E.; Purdy, D.; Kautz, G. Calibration and Integrated Beam Control/Conditioning System for Phased-Array Antennas. US Patent 6163296, 19 December 2000. [Google Scholar]
- Lier, E.; Purdy, D.; Ashe, J.; Kautz, G. An On-Board Integrated Beam Conditioning System for Active Phased Array Satellite Antennas. In Proceedings of the 2000 IEEE International Conference on Phased Array Systems and Technology, Dana Point, CA, USA, 21–25 May 2000; pp. 509–512. [Google Scholar]
- Lier, E.; Zemlyansky, M.; Purdy, D.; Farina, D. Phased array calibration and characterization based on orthogonal coding: Theory and experimental validation. In Proceedings of the 2010 IEEE International Symposium on Phased Array Systems and Technology (ARRAY), Greater Boston, MA, USA, 12–15 October 2010; pp. 271–278. [Google Scholar]
- Guo, J.-L.; Li, J.-Y. Pattern synthesis of conformal array antenna in the presence of platform using differential evolution algorithm. IEEE Trans. Antennas Propag. 2009, 57, 2615–2621. [Google Scholar]
- Wu, Y.; Warnick, K.F.; Jin, C. Design study of an L-band phaed array feed for wide-field surveys and vibration compensation on FAST. IEEE Trans. Antennas Propag. 2013, 61, 3026–3033. [Google Scholar] [CrossRef]
- Purdy, D.; Ashe, J.; Lier, E. System and Method for Efficiently Characterizing the Elements in an Array Antenna. U.S. Patent 2002/0171583 A1, 21 November 2002. [Google Scholar]
- Yang, P.; Yang, F.; Nie, Z.-P.; Li, B.; Tang, X. Robust adaptive beamformer using interpolation technique for conformal antenna array. Prog. Electromagn. Res. B 2010, 23, 215–228. [Google Scholar] [CrossRef]
- Seidel, T.J.; Rowe, W.S.T.; Ghorbani, K. Passive compensation of beam shift in a bending array. Prog. Electrom. Res. 2012, 29, 41–53. [Google Scholar] [CrossRef]
- Salonen, P.; Rahmat-Samii, Y.; Schaffrath, M.; Kivikoski, M. Effect of textile materials on wearable antenna performance: A case study of GPS antennas. in Proc. IEEE Antennas Propag. Soc. Int. Symp. 2004, 1, 459–462. [Google Scholar]
- Irfan, U.; Braaten, B.D. Nulls of a conformal beamforming array on an arbitrary wedge-shaped surface. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI). Memphis, TN, USA, 6–11 July 2014; pp. 1788–1789. [Google Scholar]
- Irfan, U.; Braaten, B.D. On the effects of a changing cylindrical surface on the nulls of a conformal beamforming array. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI). Memphis, TN, USA, 6–11 July 2014; pp. 1790–1791. [Google Scholar]
- Ullah, I.; Munsif, H.; Razzaq, S.; Najam, A.I. Cylindrical phased array with adaptive nulling using eigen-correlation technique. Int. J. RF Microw. Comput.-Aided Eng. 2021, 32, e22969. [Google Scholar] [CrossRef]
- Munsif, H.; Najam, A.I.; Irfanullah. Eigenbeam analysis of singly curved conformal antenna array. Prog. Electromagn. Res. M 2021, 103, 27–36. [Google Scholar]
- Chiba, I.; Hariu, K.; Sato, S.; Mano, S. A projection method providing low sidelobe pattern in conformal array antennas. In Proceedings of the Digest on Antennas and Propagation Society International Symposium, San Jose, CA, USA, 26–30 June 1989. [Google Scholar]
- Gupta, I.J.; Ksienski, A.A. Effect of mutual coupling on the performance of adaptive arrays. IEEE Trans. Antennas Propag. 1983, 31, 785–791. [Google Scholar] [CrossRef]
- Ansys Inc. Ansoft HFSS, Version 13.0.1. Available online: http://www.ansoft.com (accessed on 24 August 2022).
- Hittite Microwave Corporation. Available online: http://www.hittite.com (accessed on 24 August 2022).
- Mini Circuits. Available online: http://www.minicircuits.com (accessed on 24 August 2022).







| Variable | Pattern 1 | Pattern 2 |
|---|---|---|
| 0° | 40° | |
| −30° | −45° | |
| 30° | −25° | |
| 40° | 10° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ullah, I.; Braaten, B.D.; Iftikhar, A.; Nikolaou, S.; Anagnostou, D.E. Beamforming with 1 × N Conformal Arrays. Sensors 2022, 22, 6616. https://doi.org/10.3390/s22176616
Ullah I, Braaten BD, Iftikhar A, Nikolaou S, Anagnostou DE. Beamforming with 1 × N Conformal Arrays. Sensors. 2022; 22(17):6616. https://doi.org/10.3390/s22176616
Chicago/Turabian StyleUllah, Irfan, Benjamin D. Braaten, Adnan Iftikhar, Symeon Nikolaou, and Dimitris E. Anagnostou. 2022. "Beamforming with 1 × N Conformal Arrays" Sensors 22, no. 17: 6616. https://doi.org/10.3390/s22176616
APA StyleUllah, I., Braaten, B. D., Iftikhar, A., Nikolaou, S., & Anagnostou, D. E. (2022). Beamforming with 1 × N Conformal Arrays. Sensors, 22(17), 6616. https://doi.org/10.3390/s22176616