
Blind Turbo Equalization of Short CPM Bursts for UAV-Aided Internet of Things


Abstract
:1. Introduction
- We combed the literature related to CPM and summarized it in the Table 1.
- To meet the demands of low data rates and short-burst transmission scenarios of the UAV-aided IoT system, a short burst structure of CPM is designed in this paper, and a link-level simulation platform of the communications system is established on this basis.
- A low complexity approach for soft-input soft-output (SISO) blind equalization is proposed to achieve a fast and accurate blind equalizer in the UAV-aided IoT system. The first step utilizes the soft-output Lazy Viterbi algorithm instead of the Viterbi algorithm to perform the expectation step and obtain a low complexity expectation–maximization Lazy Viterbi algorithm (EMLVA), while the second step applies the BCA method to establish a set of initializers, denoted as the BCA initializers, which achieves a high global convergence probability.
- The blind turbo equalization for short-burst CPM is proposed based on the new SISO blind equalization with iterative detection, where the blind equalizer and decoder exchange extrinsic information in the form of log-likelihood ratios (LLRs). To further improve the convergence of iteration and reduce the average iteration number, the decision-aided (HDA) algorithm based on weighted extrinsic information exchange is proposed.
- The blind turbo equalization based on EMLVA is proposed and evaluated on a link-level simulation platform. Simulation results show that EMLVA can obtain a good trade-off between complexity and BER performance. When the HDA with weighted extrinsic information is applied, the convergence of iterative detection and real-time performance can be further improved.
2. Related Work
3. System Model and Problem Description
3.1. Communications System Model
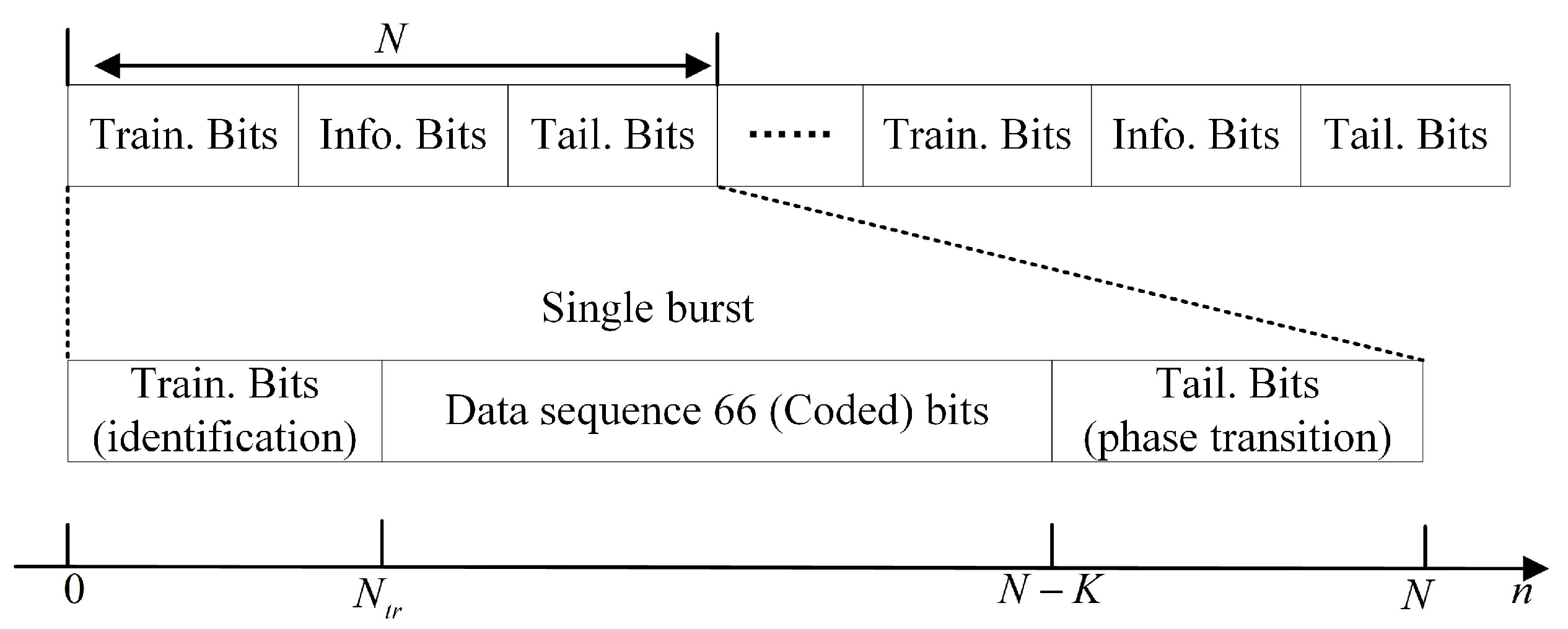
3.2. Design of Burst Structure
3.3. Channel Model
4. EMLVA for Blind Channel Equalization
4.1. EM Algorithm
4.2. VA and Its Variants
| Algorithm 1 Lazy Viterbi algorithm [36]. |
|
4.3. The EMVA/EMLVA Blind Equalizer
| Algorithm 2 The EMVA/EMLVA blind equalizer. |
|
4.4. BCA Method and Convergence Criterion
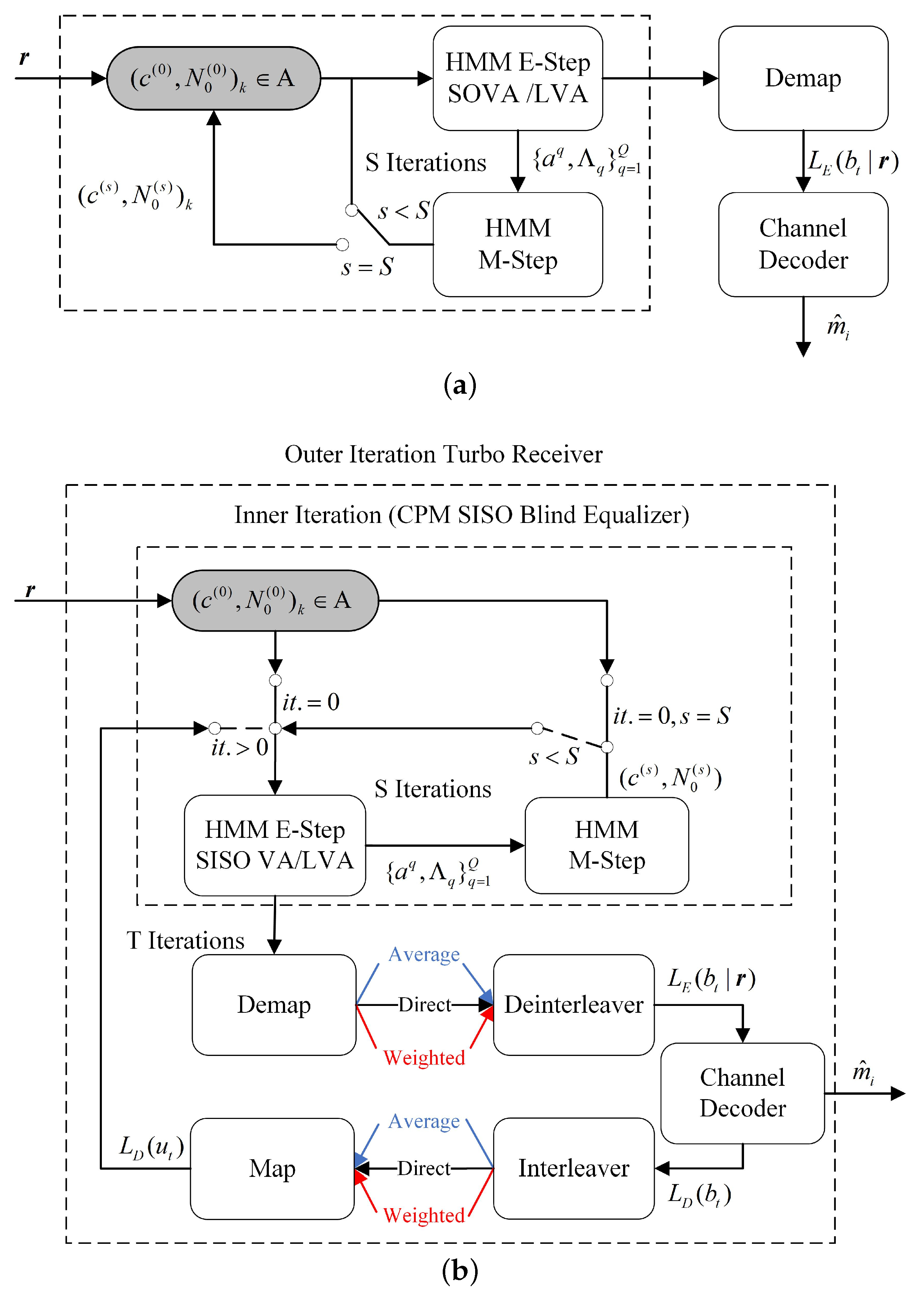
4.5. The Turbo EMLVA Blind Equalizer and Positive Feedback
| Algorithm 3 The EMLVA blind turbo equalizer (T-EMLVA). |
|
4.6. Complexity Analysis
5. Experimental Evaluation
5.1. Experimental Setup
5.2. Simulation Results
5.2.1. System Parameter Optimization
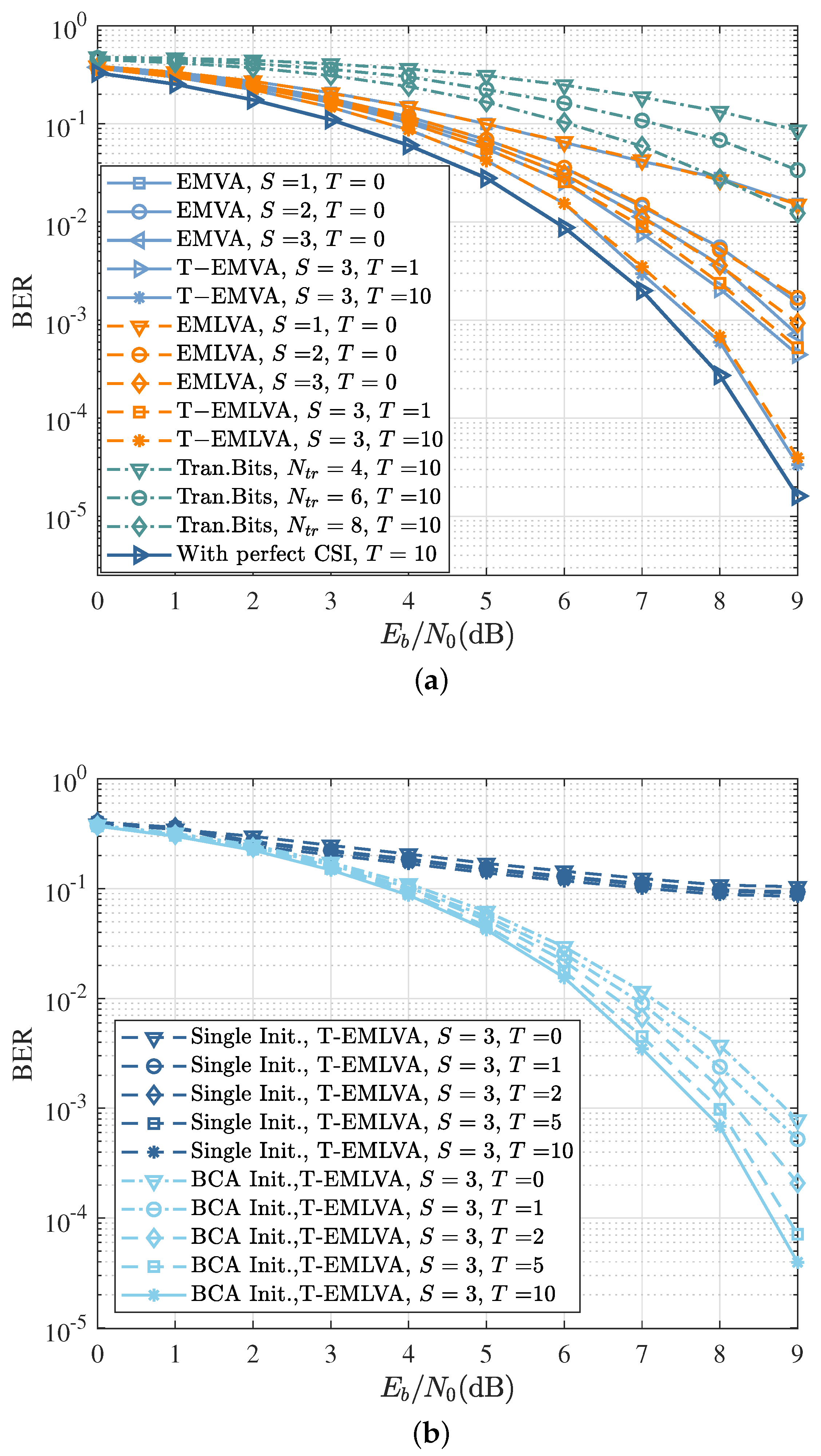
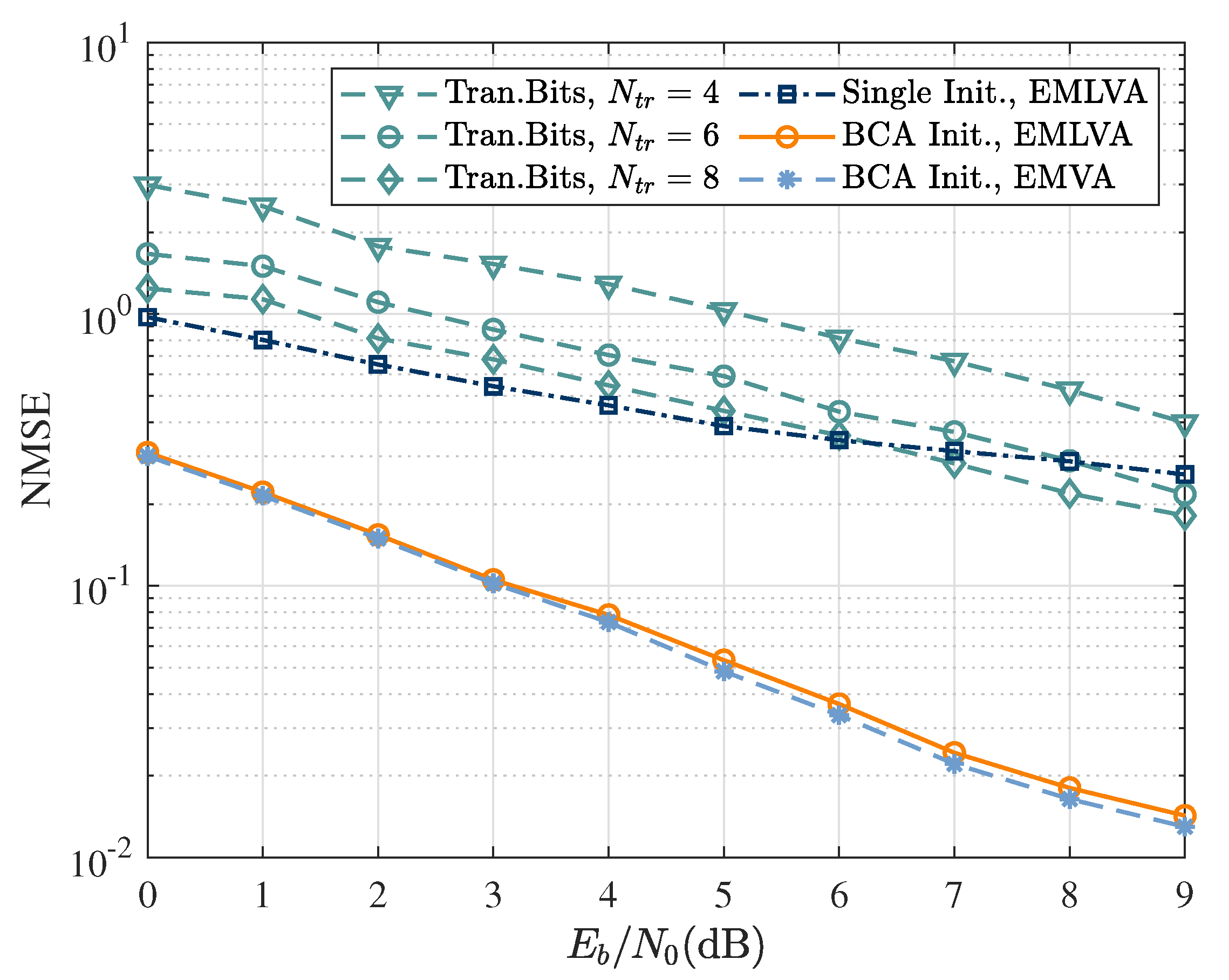
5.2.2. Performance Comparison of EMLVA, EMVA, and the Method Based on the Training Sequence
5.2.3. Improved Exchange Methods of Extrinsic Information and Stopping Criterion
5.2.4. The Effect of Channel Length Overestimation on the Performance
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, W.U.; Jameel, F.; Jamshed, M.A.; Pervaiz, H.; Khan, S.; Liu, J. Efficient power allocation for NOMA-enabled IoT networks in 6G era. Phys. Commun. 2020, 39, 101043. [Google Scholar]
- You, X.; Wang, C.X.; Huang, J.; Gao, X.; Zhang, Z.; Wang, M.; Huang, Y.; Zhang, C.; Jiang, Y.; Wang, J.; et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts. Sci. China Inf. Sci. 2021, 64, 64. [Google Scholar]
- Zheng, X.; Zhang, J.; Pan, G. On Secrecy Analysis of Underlay Cognitive UAV-Aided NOMA Systems with TAS/MRC. IEEE Internet Things J. 2022. [Google Scholar] [CrossRef]
- Hamam, H. Energy Efficient UAV Flight Path Model for Cluster Head Selection in Next-Generation Wireless Sensor Networks. Sensors 2021, 21, 8445. [Google Scholar]
- AlJubayrin, S.; Al-Wesabi, F.N.; Alsolai, H.; Duhayyim, M.A.; Nour, M.K.; Khan, W.U.; Mahmood, A.; Rabie, K.; Shongwe, T. Energy Efficient Transmission Design for NOMA Backscatter-Aided UAV Networks with Imperfect CSI. Drones 2022, 6, 190. [Google Scholar]
- Zhang, Q.; Sun, H.; Feng, Z.; Gao, H.; Li, W. Data-Aided Doppler Frequency Shift Estimation and Compensation for UAVs. IEEE Internet Things J. 2020, 7, 400–415. [Google Scholar]
- Say, S.; Inata, H.; Liu, J.; Shimamoto, S. Priority-based Data Gathering Framework in UAV-assisted Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 5785–5794. [Google Scholar]
- Feng, W.; Wang, J.; Chen, Y.; Wang, X.; Ge, N.; Lu, J. UAV-Aided MIMO Communications for 5G Internet of Things. IEEE Internet Things J. 2019, 6, 1731–1740. [Google Scholar]
- Li, K.; Ni, W.; Tovar, E.; Guizani, M. Joint Flight Cruise Control and Data Collection in UAV-Aided Internet of Things: An Onboard Deep Reinforcement Learning Approach. IEEE Internet Things J. 2021, 8, 9787–9799. [Google Scholar]
- Lu, X.; Yang, W.; Yan, S.; Li, Z.; Ng, D.W.K. Covertness and Timeliness of Data Collection in UAV-Aided Wireless-Powered IoT. IEEE Internet Things J. 2022, 9, 12573–12587. [Google Scholar]
- Guo, H.; Liu, J. UAV-Enhanced Intelligent Offloading for Internet of Things at the Edge. IEEE Trans. Ind. Inform. 2020, 16, 2737–2746. [Google Scholar]
- Ikpehai, A.; Adebisi, B.; Rabie, K.M.; Anoh, K.; Ande, R.E.; Hammoudeh, M.; Gacanin, H.; Mbanaso, U.M. Low-Power Wide Area Network Technologies for Internet-of-Things: A Comparative Review. IEEE Internet Things J. 2019, 6, 2225–2240. [Google Scholar]
- Chayot, R.; Thomas, N.; Poulliat, C.; Boucheret, M.; Lesthievent, G.; Van Wambeke, N. A New Exact Low-Complexity MMSE Equalizer for Continuous Phase Modulation. IEEE Commun. Lett. 2018, 22, 2218–2221. [Google Scholar]
- Ho, P.; Kim, J.H. Pilot symbol-assisted detection of CPM schemes operating in fast fading channels. IEEE Trans. Commun. 1996, 44, 337–347. [Google Scholar]
- Brown, C.; Vigneron, P.J. Signal recovery for CPM in frequency flat fast fading channels. In Proceedings of the MILCOM 2012—2012 IEEE Military Communications Conference, Orlando, FL, USA, 29 October–1 November 2012; pp. 1–6. [Google Scholar]
- Neugebauer, S.P.; Ding, Z. Blind SIMO channel estimation for CPM using the Laurent approximation. In Proceedings of the 2004 IEEE International Symposium on Circuits and Systems (ISCAS), Vancouver, BC, Canada, 23–26 May 2004; p. V. [Google Scholar]
- Kammeyer, K.D.; Kuhn, V.; Petermann, T. Blind and nonblind turbo estimation for fast fading GSM channels. IEEE J. Sel. Areas Commun. 2001, 19, 1718–1728. [Google Scholar]
- Yang, Z.; Wang, X. Turbo equalization for GMSK signaling over multipath channels based on the Gibbs sampler. IEEE J. Sel. Areas Commun. 2001, 19, 1753–1763. [Google Scholar]
- Hansson, A.; Chugg, K.M.; Aulin, T. On forward-adaptive versus forward/backward-adaptive SISO algorithms for Rayleigh fading channels. IEEE Commun. Lett. 2001, 5, 477–479. [Google Scholar]
- Chung, K.; Chugg, K.M.; Heo, J. Reduced state adaptive SISO algorithms for serially concatenated CPM over frequency-selective fading channels. In Proceedings of the GLOBECOM’01, San Antonio, TX, USA, 25–29 November 2001; pp. 1162–1166. [Google Scholar]
- Chung, K.; Heo, J. RS-A-SISO algorithms for serially concatenated CPM over fading channels and density evolution analysis. Electron. Lett. 2003, 39, 1597–1598. [Google Scholar]
- Anastasopoulos, A.; Chugg, K.M. Adaptive soft-input soft-output algorithms for iterative detection with parametric uncertainty. IEEE Trans. Commun. 2000, 48, 1638–1649. [Google Scholar]
- Hansson, A.; Aulin, T. Generalized APP detection of continuous phase modulation over unknown ISI channels. IEEE Trans. Commun. 2005, 53, 1615–1619. [Google Scholar]
- Anton-Haro, C.; Fonollosa, J.A.R.; Fonollosa, J.R. Blind Channel Estimation and Data Detection Using Hidden Markov Models. IEEE Trans. Signal Process. 1997, 45, 241–247. [Google Scholar] [CrossRef]
- Cirpan, H.A.; Tsatsanis, M.K. Blind Receivers for Nonlinearly Modulated Signals in Multipath. IEEE Trans. Signal Process. 1999, 47, 583–586. [Google Scholar] [CrossRef]
- Nguyen, H.; Levy, B.C. Blind and Semi-Blind Equalization of CPM SignalsWith the EMV Algorithm. IEEE Trans. Signal Process. 2003, 51, 2650–2664. [Google Scholar] [CrossRef]
- Tan, J.; Stuber, G.L. Frequency-domain equalization for continuous phase modulation. IEEE Trans. Wirel. Commun. 2005, 4, 2479–2490. [Google Scholar] [CrossRef]
- Pancaldi, F.; Vitetta, G.M. Equalization algorithms in the frequency domain for continuous phase modulations. IEEE Trans. Commun. 2006, 54, 648–658. [Google Scholar] [CrossRef]
- Ozgul, B.; Koca, M.; Delic, H. Double Turbo Equalization of Continuous Phase Modulation with Frequency Domain Processing. IEEE Trans. Commun. 2009, 57, 423–429. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Z. Turbo equalization for GMSK signaling over multipath channels. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, UT, USA, 7–11 May 2001; pp. 2641–2644. [Google Scholar]
- Chamaa, M.E.; Lankl, B. Noncoherent Symbol Detection of Short CPM Bursts in Frequency-Selective Fading Channels. IEEE Trans. Wirel. Commun. 2020, 19, 771–782. [Google Scholar] [CrossRef]
- Gaudio, L.; Matuz, B.; Ninacs, T.; Colavolpe, G.; Vannucci, A. Approximate ML Decoding of Short Convolutional Codes Over Phase Noise Channels. IEEE Commun. Lett. 2020, 24, 325–329. [Google Scholar]
- Lang, A.; Lankl, B. Very Short Channel Codes for Burst-Type Transmissions. In Proceedings of the MILCOM 2018—2018 IEEE Military Communications Conference (MILCOM), Los Angeles, CA, USA, 29–31 October 2018; pp. 1–9. [Google Scholar]
- Sun, R.; Matolak, D.W. Air-Ground Channel Characterization for Unmanned Aircraft Systems—Part II: Hilly Mountainous Settings. IEEE Trans. Veh. Technol. 2017, 66, 1913–1925. [Google Scholar] [CrossRef]
- Feldman, J.; Abou-Faycal, I.; Frigo, M. A fast maximum-likelihood decoder for convolutional codes. In Proceedings of the Proceedings IEEE 56th Vehicular Technology Conference, Vancouver, BC, Canada, 24–28 September 2002; pp. 371–375. [Google Scholar]
- Huang, Q.; Xiao, Q.; Quan, L.; Wang, Z.; Wang, S. Trimming Soft-Input Soft-Output Viterbi Algorithms. IEEE Trans. Commun. 2016, 64, 2952–2960. [Google Scholar] [CrossRef]
- Nguyen, H.; Levy, B.C. The expectation-maximization Viterbi algorithm for blind adaptive channel equalization. IEEE Trans. Commun. 2005, 53, 1671–1678. [Google Scholar]
- Wu, Q.; Zhang, R. Towards Smart and Reconfigurable Environment: Intelligent Reflecting Surface Aided Wireless Network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar]
- Khan, W.U.; Lagunas, E.; Ali, Z.; Javed, M.A.; Ahmed, M.; Chatzinotas, S.; Ottersten, B.; Popovski, P. Opportunities for Physical Layer Security in UAV Communication Enhanced with Intelligent Reflective Surfaces. arXiv 2022, arXiv:2203.16907. [Google Scholar]
- Wu, Q.; Guan, X.; Zhang, R. Intelligent Reflecting Surface-Aided Wireless Energy and Information Transmission: An Overview. Proc. IEEE 2022, 110, 150–170. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Ref. | Contribution/Methodology |
|---|---|---|
| Data-aided | [14] | A generalized pilot symbol-aided demodulation method is proposed in a flat fading channel. The optimal filters for channel estimation are also presented. |
| [15] | The estimate of the channel is realized by local B-splines. | |
| Statistics | [16] | The second-order statistics of the signal for channel estimation is extracted for CPM by TXK. |
| [17] | A fourth-order cross-cumulant matrix is extracted by the eigenvector method. | |
| MCMC | [18] | A nonlinear signal model for GMSK and information symbols with implicit channel estimation by MCMC are developed. |
| Adaptive equalization | [19] | A forward adaptive SISO that considers the channel correlation in only one direction is proposed for MSK. |
| [20] | A variety of the reduced state FA SISO is proposed. | |
| [21] | The thresholds of the RS-A-SISO algorithms are obtained by the density evolution technique. | |
| [22] | Derivation of the forward/backward adaptive algorithm. | |
| [23] | Derivation of the generalized forward/backward adaptive algorithm. | |
| HMM | [24] | The BBW algorithm, as well as two variants, are proposed for CPM. |
| [25] | A stochastic ML blind channel estimation is developed, and an approximate Cramér–Rao bound for CPM is derived. | |
| [26] | The Viterbi algorithm is applied within the EM algorithm. | |
| FDE | [27] | The single-carrier frequency-domain equalization is used in the CPM signal for the first time. |
| [28] | Laurent decomposition is used to realize traditional equalization (linear and decision feedback) and turbo equalization in the frequency domain. | |
| [29] | More iterative gain without matrix inversion. |
| Algorithm | Standard Equalization | Turbo Equalization |
|---|---|---|
| EMVA | ||
| EMLVA | ||
| EMLVA with HDA |
| Parameters | Value | Remarks |
|---|---|---|
| Frequency pulse | Gaussian pulse | |
| Modulation order (M) | 2 | - |
| Modulation index (h) | 1/2 | |
| Training bits | 4,6,8 | ML estimation |
| Coded data bits | 66 | - |
| Baud rate | 150 kHz | - |
| Code rate | 1/2 | convolutional code |
| Samples/symbol | 2 | |
| Multipath channel | two-ray Rician channel | - |
| Rician factor | hilly/mountainous scenarios | |
| Maximum delay spread | - | |
| Inner iteration (S) | 3 | |
| Outer iteration (T) | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Xie, C.; Wang, H.; Wei, Y.; Guo, D. Blind Turbo Equalization of Short CPM Bursts for UAV-Aided Internet of Things. Sensors 2022, 22, 6508. https://doi.org/10.3390/s22176508
Pan Z, Xie C, Wang H, Wei Y, Guo D. Blind Turbo Equalization of Short CPM Bursts for UAV-Aided Internet of Things. Sensors. 2022; 22(17):6508. https://doi.org/10.3390/s22176508
Chicago/Turabian StylePan, Zihao, Chen Xie, Heng Wang, Yimin Wei, and Daoxing Guo. 2022. "Blind Turbo Equalization of Short CPM Bursts for UAV-Aided Internet of Things" Sensors 22, no. 17: 6508. https://doi.org/10.3390/s22176508
APA StylePan, Z., Xie, C., Wang, H., Wei, Y., & Guo, D. (2022). Blind Turbo Equalization of Short CPM Bursts for UAV-Aided Internet of Things. Sensors, 22(17), 6508. https://doi.org/10.3390/s22176508