
UBER: UAV-Based Energy-Efficient Reconfigurable Routing Scheme for Smart Wireless Livestock Sensor Network

 , ,
, ,  ,
, 
Abstract
:1. Introduction
2. Related Works
3. Proposed UBER Scheme
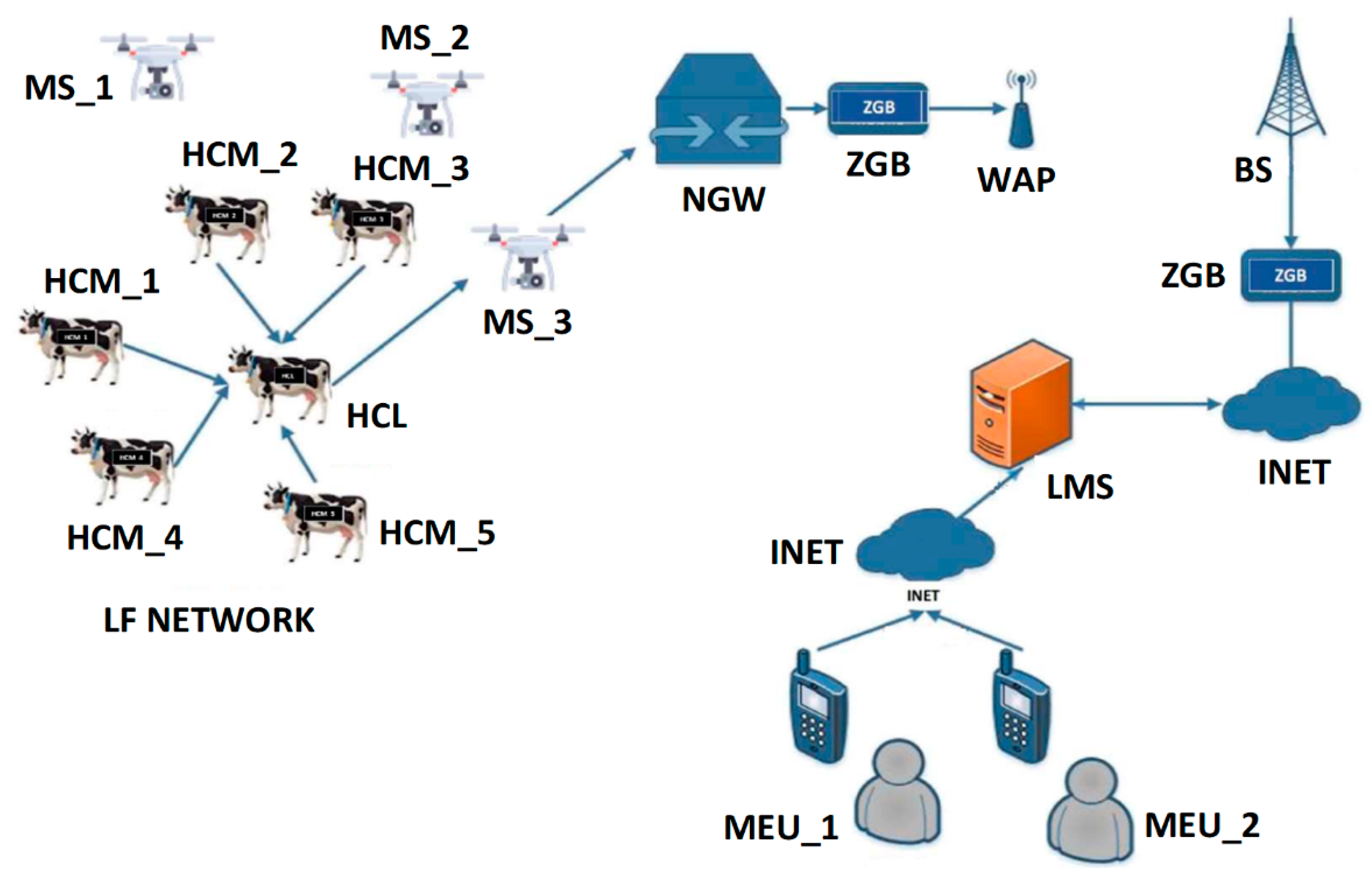
3.1. Integrated UAV-WSN Network Model
3.2. Assumptions
- -
- All SNs are wearable, portable, and identical, with similar energy resources, processing capacities and transceiver characteristics. This assumption describes the physical and electronic properties of the sensor nodes suitable for livestock (cattle) monitoring. It is necessary for the sensors to be wearable and portable to prevent discomfort to the livestock, facilitate sensing through direct body contact, and make sensor replacement easier. It is necessary for the sensors to be identical to avoid tagging/stamping, synchronization and mismatch errors during data aggregation and processing.
- -
- UAVs act as MS with more onboard radios and higher energy resources, processing capacities and transceiver range. This assumption describes the functional and electronic properties of the UAVs suitable for the integrated model presented in Figure 1. The fewer UAVs deployed should have more onboard radios to accommodate the influx of periodic traffic from different clusters.
- -
- UAV’s spatial movement is 3-D with a variable velocity profile. This assumption describes the spatial motion capability (in x, y, z direction following straight-line left-to-right up-and-down scanning pattern) of the employed UAV and its limitations (no axial rotation, no angular twists/bends). Velocity profiles for the UAV are stationary, scanning velocity (20 m/s), and data gathering velocity (5 m/s) as stated in Table 1.
- -
- UAVs have embedded intelligence for smart decision-making, and they can be controlled from the LMS. This assumption describes the cognitive capability of the UAV and its limitations (not fully autonomous as its activities can be controlled from the LMS). The reason for utilizing this semi-autonomous arrangement is to prevent out-of-perimeter straying, which can lead to lost UAV, theft, unrestrained energy loss or device damage.
3.3. Energy Consumption Model
3.4. Cluster Configuration Phase
| Algortihm 1 Cluster Configuration Algorithm for UBER. | |
| 1: | for each SNx received MS_CONNECT signal |
| 2: | if (Zx,t ← MS && Zx,t ≠ NULL) |
| 3: | status.connect(MS) ← TRUE |
| 4: | compute CCx ← find_peak(Zx,t) |
| 5: | else |
| 6: | status.connect(MS) ← FALSE |
| 7: | CCx ← −INF |
| 8: | end if |
| 9: | broadcast CCx to SNx.ADJ within CTR |
| 10: | status.final_HCL ← FALSE |
| 11: | end for |
| 12: | while (R ≠ Rmax && HCLPR ≠ 1) |
| 13: | if (status.connect(MS) ← TRUE && status.trial_HCL ← TRUE) |
| 14: | HHCLPR ← rand(0,1)CLPR ← rand(0,1) |
| 15: | elect.MY_HCL ← trial_HCL.min(CCx) |
| 16: | if (MY_HCL = SN_ID && HCLPR ≠ 1) |
| 17: | broadcast HCL_polling(SN_ID, trial_HCL, CCx) |
| 18: | status.final_HCL ← FALSE |
| 19: | end if |
| 20: | else |
| 21: | broadcast HCL_polling(SN_ID, final_HCL, CCx) |
| 22: | end if |
| 23: | HCLPR at t−1 ← HCLPR |
| 24: | HCLPR ← min(2xHCLPR,1) |
| 25: | end while |
| 26: | status.final_HCL ← TRUE |
| 27: | update(trial_HCL) ← POLLING packet |
| 28: | elect(trial_HCL) ← IDLE |
| 29: | elect(final_HCL) ← ACTIVE |
| 30: | broadcast POLLING packet within CTR |
| 31: | for each ordinary SNx received POLLING packet |
| 32: | compute Euclidean distance cost |
| 33: | multicast JOIN packet |
| 34: | end for |
| 35: | if SNx did not receive POLLING packet |
| 36: | compute euclidean distance cost to SNx.ADJ within CTR |
| 37: | construct EDGE using least distance cost |
| 38: | end if |
| 39: | for each HCL |
| 40: | register HCM list |
| 41: | construct EDGE with HCM set |
| 42: | end for |
3.5. Data Gathering Phase
4. Results and Discussions
4.1. Performance Metrics
4.2. Simulation Parameters
4.3. Algorithmic Complexity
4.4. Performance Analysis
4.4.1. Analysis of UBER Performance
4.4.2. Effect of MS Altitude on Network Stability (NST)
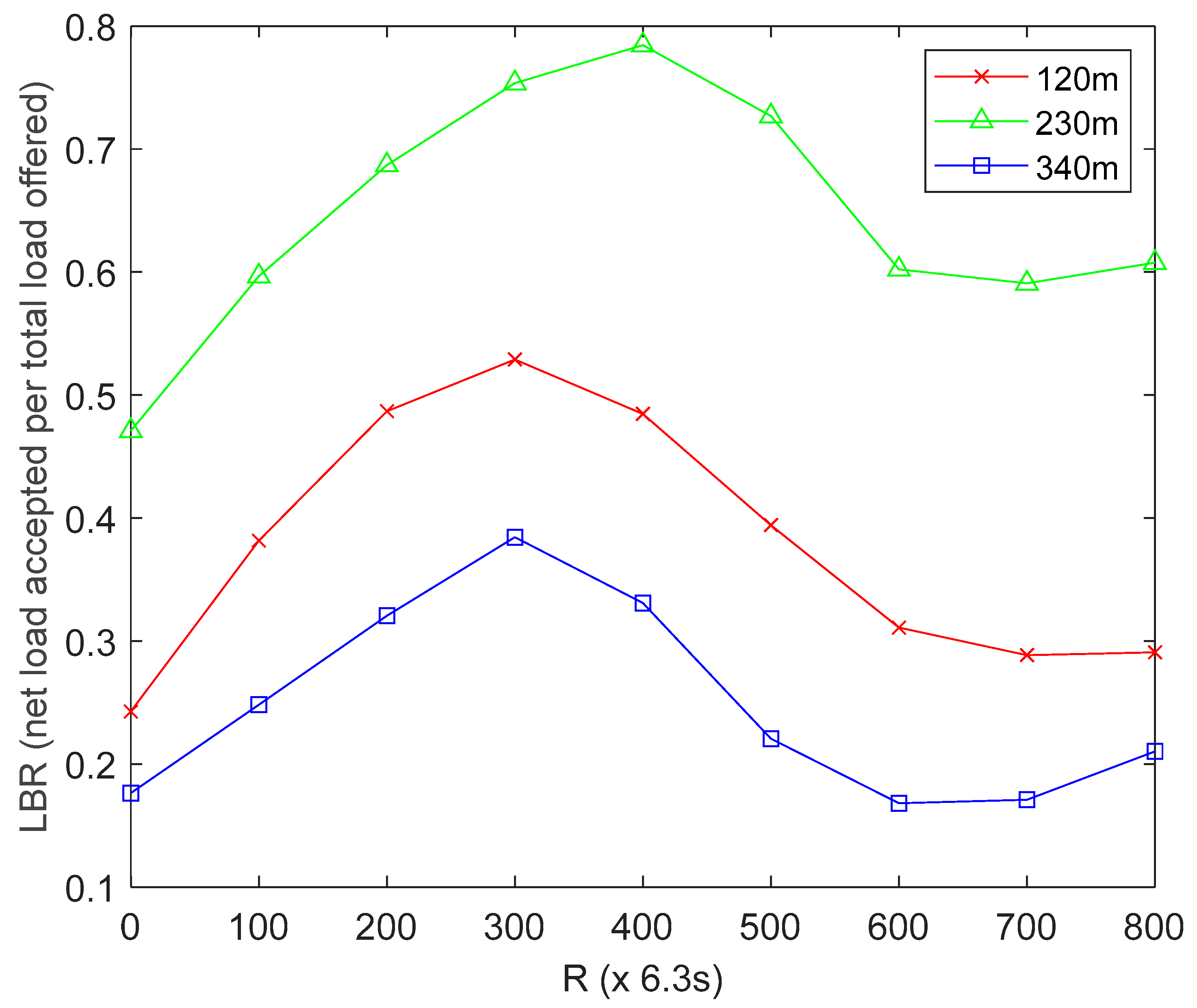
4.4.3. Effect of MS Altitude on Load Balancing Ratio (LBR)
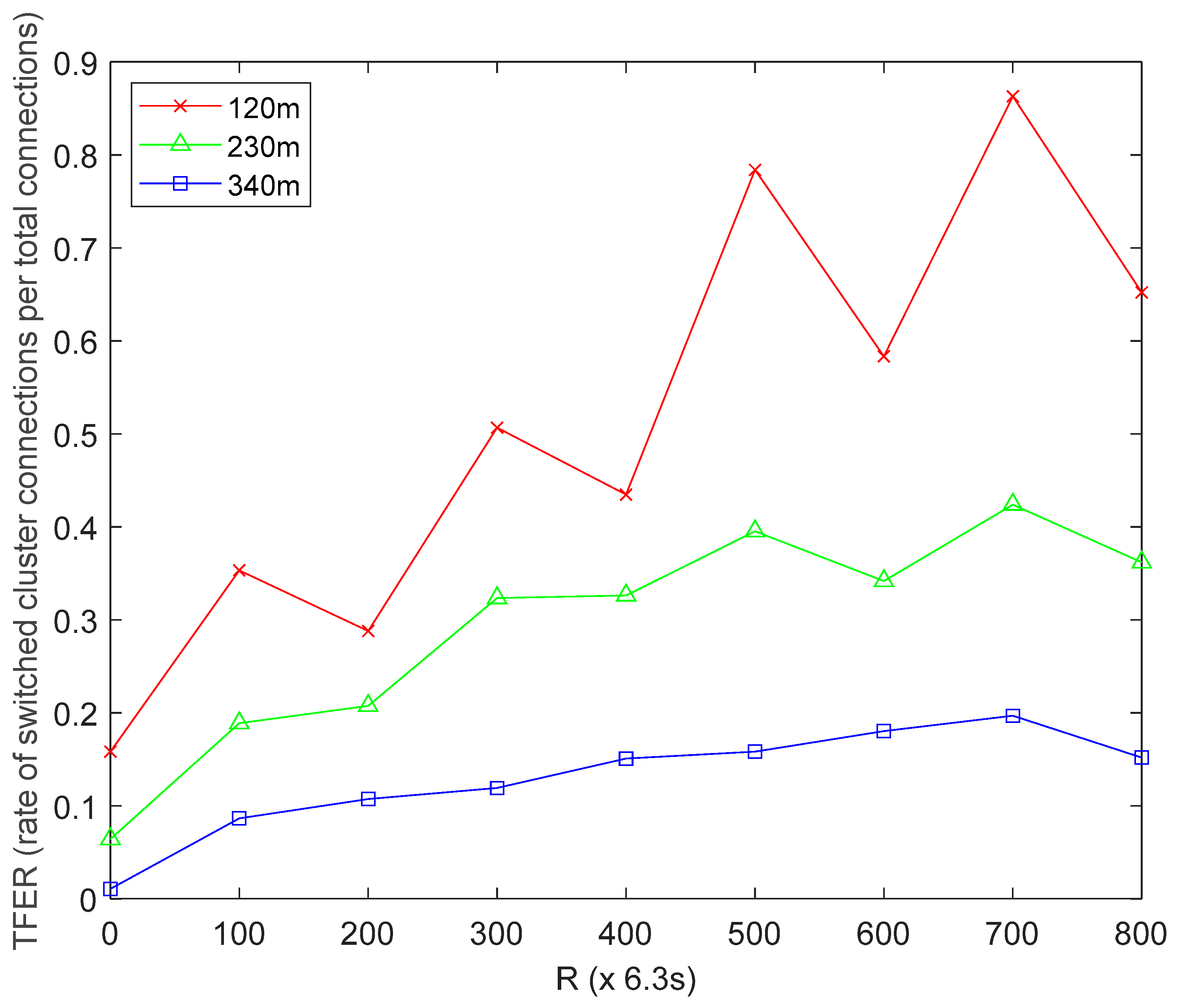
4.4.4. Effect of MS Altitude on Topology Fluctuation Effect Ratio (TFER)
4.5. Comparitive Performance Evaluation of UBER
4.5.1. Evaluation of Energy Consumption (ENC) Performance
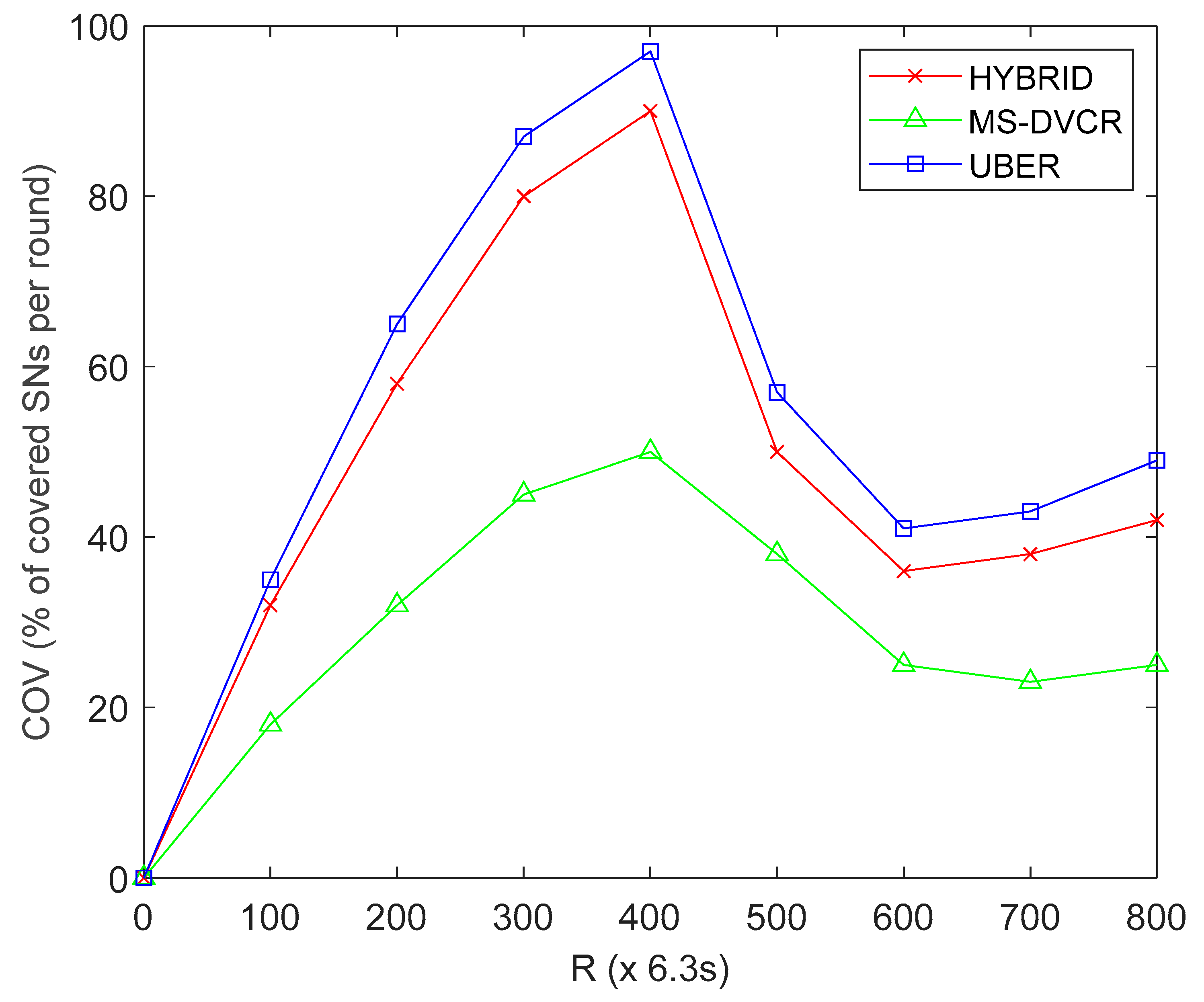
4.5.2. Evaluation of Network Coverage (COV) Performance
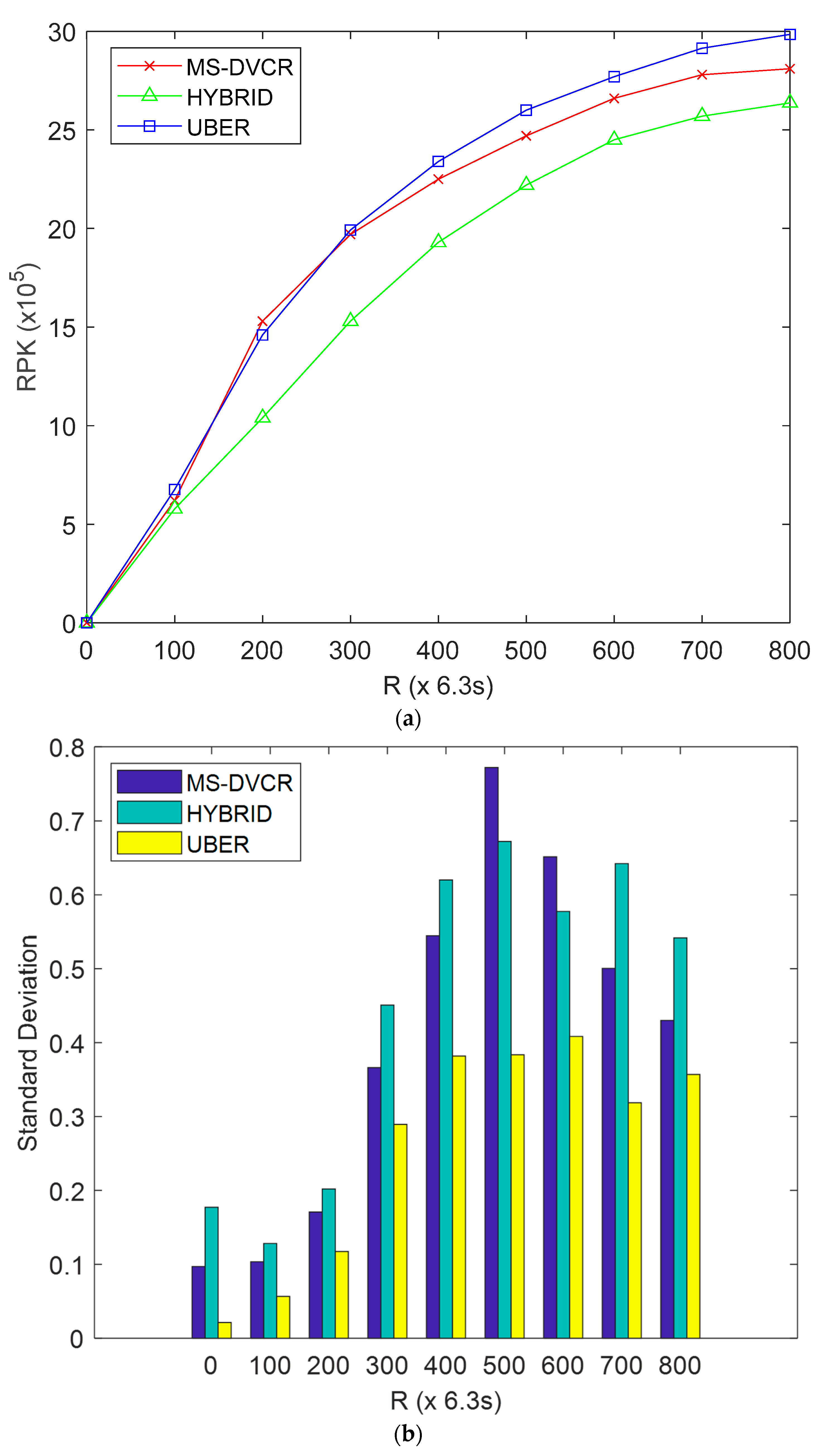
4.5.3. Evaluation of Received Packets (RPK) Performance
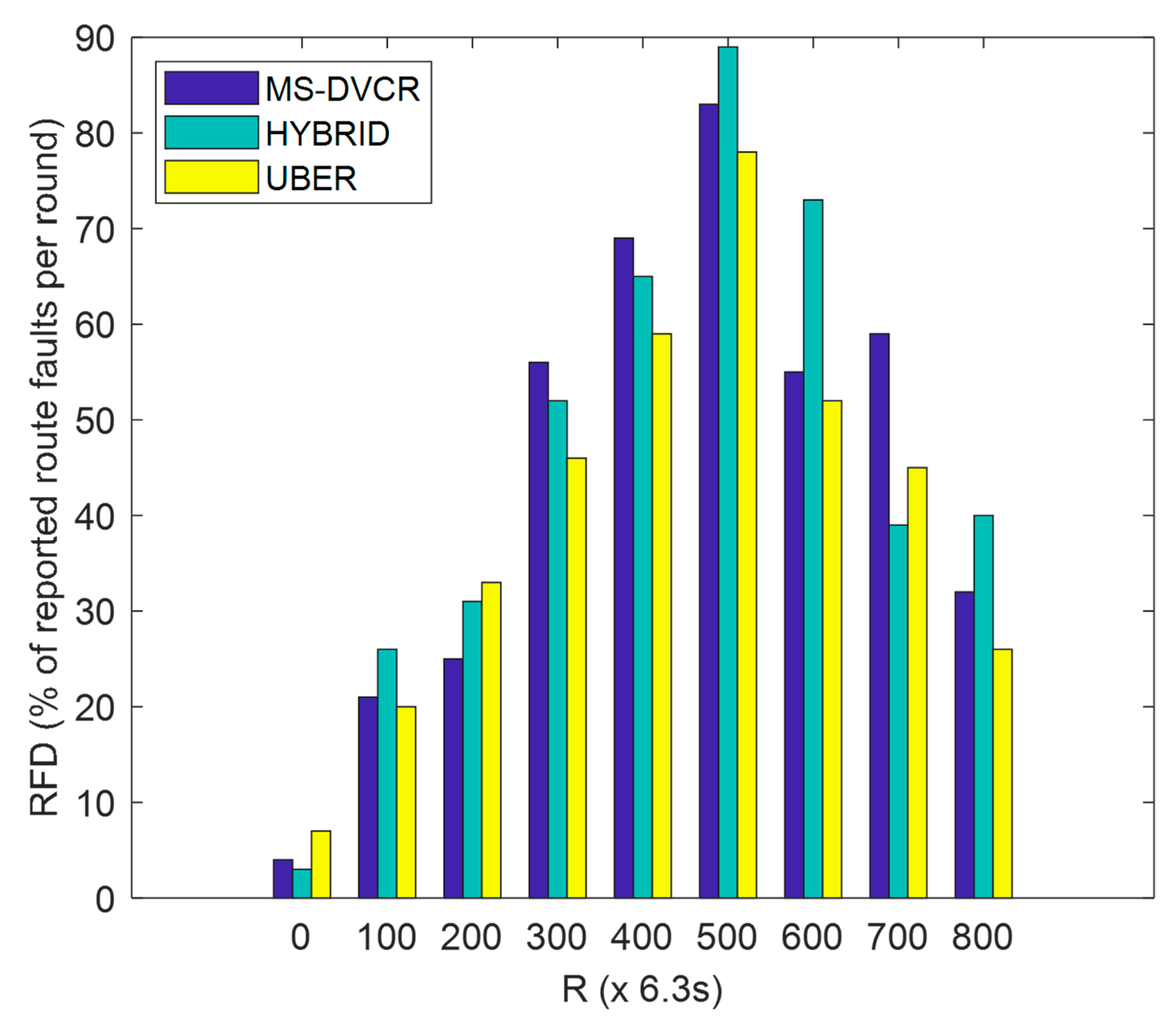
4.5.4. Evaluation of Route Failures Detected (RFD) Performance
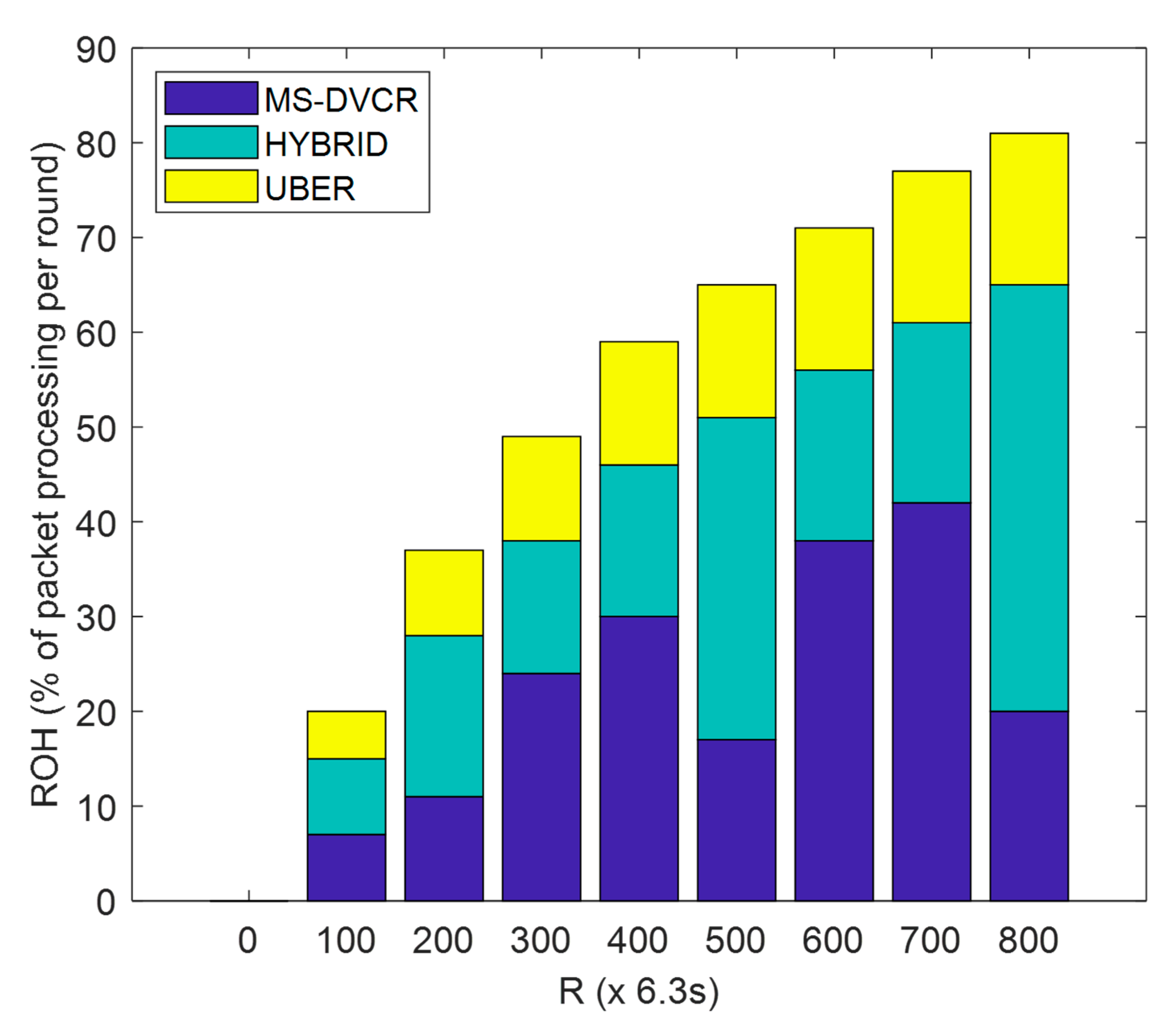
4.5.5. Evaluation of Routing Overhead (ROH) Performance
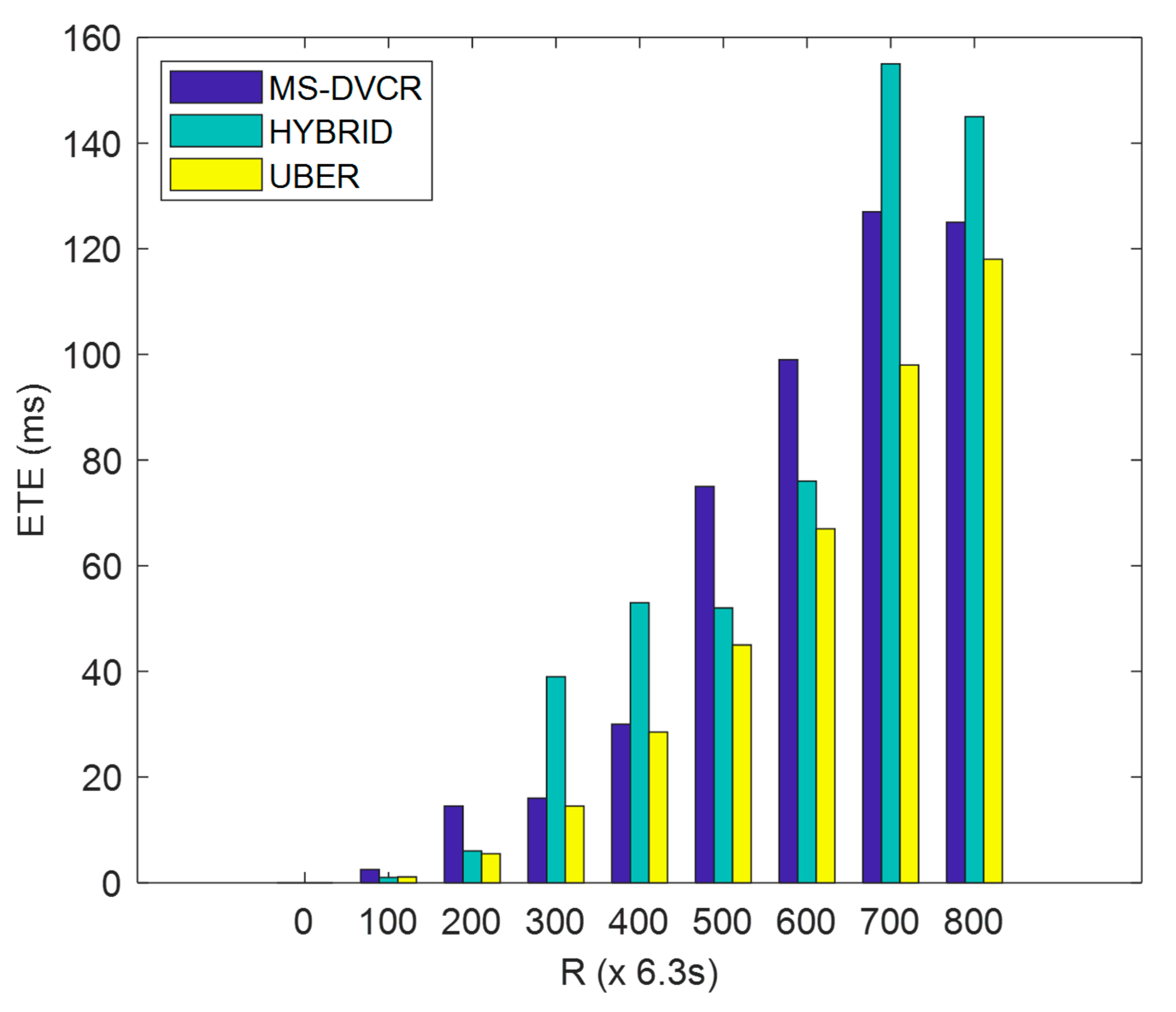
4.5.6. Evaluation of End-To-End Delay (ETE) Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Alanezi, M.A.; Shahriar, M.S.; Hasan, M.B.; Ahmed, S.; Sha’aban, Y.A.; Bouchekara, H.R.E.H. Livestock Management with Unmanned Aerial Vehicles: A Review. IEEE Access 2022, 10, 45001–45028. [Google Scholar] [CrossRef]
- Barbedo, J.G.A.; Koenigkan, L.V. Perspectives on the use of unmanned aerial systems to monitor cattle. Outlook Agric. 2018, 47, 214–222. [Google Scholar] [CrossRef]
- Awan, K.M.; Sherazi, H.H.R.; Ali, A.; Iqbal, R.; Khan, Z.A.; Mukherjee, M. Energy-aware cluster-based routing optimization for WSNs in the livestock industry. Trans. Emerg. Telecommun. Technol. 2019, 33, e3816. [Google Scholar] [CrossRef]
- Maddikunta, P.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned Aerial Vehicles in Smart Agriculture: Applications, Requirements, and Challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Friha, O.; Ferrag, M.A.; Shu, L.; Maglaras, L.; Wang, X. Internet of Things for the Future of Smart Agriculture: A Comprehensive Survey of Emerging Technologies. IEEE/CAA J. Autom. Sin. 2021, 8, 718–752. [Google Scholar] [CrossRef]
- Long, N.K.; Sammut, K.; Sgarioto, D.; Garratt, M.; Abbass, H.A. A Comprehensive Review of Shepherding as a Bio-Inspired Swarm-Robotics Guidance Approach. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 4, 523–537. [Google Scholar] [CrossRef]
- Xiang, T.-Z.; Xia, G.-S.; Zhang, L. Mini-Unmanned Aerial Vehicle-Based Remote Sensing: Techniques, applications, and prospects. IEEE Geosci. Remote Sens. Mag. 2019, 7, 29–63. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S. KInternet of Things (IoT) and Agricultural Unmanned Aerial Vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2020, 18, 100187. [Google Scholar] [CrossRef]
- Kakamoukas, G.; Sariciannidis, P.; Livanos, G.; Zervakis, M.; Ramnalis, D.; Polychronos, V.; Karamitsou, T.; Folinas, A.; Tsitsiokas, N. A Multi-collective, IoT-enabled, Adaptive Smart Farming Architecture. In Proceedings of the 2019 IEEE International Conference on Imaging Systems and Techniques (IST), Abu Dhabi, United Arab Emirates, 9–10 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Urdaneta, G.A.; Meyers, C.; Rogalski, L. How do drones facilitate human life? Future Technol. 2022, 1, 7–13. [Google Scholar] [CrossRef]
- Mistry, C.; Ghosh, A.; Biswas, M.; Basak, B.B.A. Applications of Internet of Things and Unmanned Aerial Vehicle in Smart Agriculture: A Review. OSF Prepr. 2022. [Google Scholar] [CrossRef]
- Casas, R.; Hermosa, A.; Marco, Á.; Blanco, T.; Zarazaga-Soria, F.J. Real-Time Extensive Livestock Monitoring Using LPWAN Smart Wearable and Infrastructure. Appl. Sci. 2021, 11, 1240. [Google Scholar] [CrossRef]
- Tahir, A.; Böling, J.; Haghbayan, M.-H.; Toivonen, H.T.; Plosila, J. Swarms of Unmanned Aerial Vehicles—A Survey. J. Ind. Inf. Integr. 2019, 16, 100106. [Google Scholar] [CrossRef]
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Symagulov, A.; Kuchin, Y.; Zaitseva, E.; Bekbotayeva, A.; Yakunin, K.; Assanov, I.; Levashenko, V.; Popova, Y.; Akzhalova, A.; et al. Review of Some Applications of Unmanned Aerial Vehicles Technology in the Resource-Rich Country. Appl. Sci. 2021, 11, 10171. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A.V. Towards Fully Autonomous UAVs: A Survey. Sensors 2021, 21, 6223. [Google Scholar] [CrossRef]
- Sivakumar, M.; TYJ, N.M. A Literature Survey of Unmanned Aerial Vehicle Usage for Civil Applications. J. Aerosp. Technol. Manag. 2021, 13, 1–23. [Google Scholar] [CrossRef]
- Petrova, T.; Petrov, Z. Analysis of Efficiency of the Unmanned Aerial Vehicles Use in Contemporary Agrotechnologies. Int. J. Inf. Technol. Secur. 2021, 13, 25–34. Available online: https://ijits-bg.com/contents/IJITS-2021-No4/2021-N4-03.pdf (accessed on 24 April 2022).
- Freed, T.; Carson, V.C.; Doerr, K.H. Optimizing a RFID-UAV cattle search tour. Int. J. RF Technol. 2021, 11, 127–141. [Google Scholar] [CrossRef]
- Chamoso, P.; Raveane, W.; Parra, V.; González, A. UAVs Applied to the Counting and Monitoring of Animals. In Ambient Intelligence—Software and Applications; Springer: Cham, Switzerland, 2014; pp. 71–80. [Google Scholar] [CrossRef]
- Afrianto, I.; Wahjuni, S.; Djatna, T. Model of Ubiquitous Precision Livestock System 4.0: A Technological Review. FoITIC 2020, 156–162. Available online: https://eproceeding.itenas.ac.id/index.php/foitic/article/view/74 (accessed on 25 April 2022).
- Chabot, D.; Bird, D.M. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in? J. Unmanned Veh. Syst. 2015, 3, 137–155. [Google Scholar] [CrossRef]
- Rivas, A.; Chamoso, P.; González-Briones, A.; Corchado, J.M. Detection of Cattle Using Drones and Convolutional Neural Networks. Sensors 2018, 18, 2048. [Google Scholar] [CrossRef] [PubMed]
- Behjati, M.; Noh, A.B.M.; Alobaidy, H.A.H.; Zulkifley, M.A.; Nordin, R.; Abdullah, N.F. LoRa Communications as an Enabler for Internet of Drones towards Large-Scale Livestock Monitoring in Rural Farms. Sensors 2021, 21, 5044. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Solmaz, G.; Rahmatizadeh, R.; Turgut, D.; Bölöni, L. Animal monitoring with unmanned aerial vehicle-aided wireless sensor networks. In Proceedings of the 2015 IEEE 40th Conference on Local Computer Networks (LCN), Clearwater Beach, FL, USA, 26–29 October 2015; pp. 125–132. [Google Scholar] [CrossRef]
- Xu, J.; Solmaz, G.; Rahmatizadeh, R.; Turgut, D.; Boloni, L. Internet of Things Applications: Animal Monitoring with Unmanned Aerial Vehicle. arXiv 2016, arXiv:1610.05287. Available online: https://arxiv.org/abs/1610.05287 (accessed on 25 April 2022).
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000; pp. 1–10. [Google Scholar] [CrossRef]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Coyle, E.J. An energy efficient hierarchical clustering algorithm for wireless sensor networks. In Proceedings of the IEEE INFOCOM 2003—Twenty-Second Annual Joint Conference of the IEEE Computer and Communications Societies, San Francisco, CA, USA, 30 March–3 April 2003; pp. 1713–1723. [Google Scholar] [CrossRef]
- Huang, H.; Wu, J. A probabilistic clustering algorithm in wireless sensor networks. In Proceedings of the VTC-2005-Fall—2005 IEEE 62nd Vehicular Technology Conference, Dallas, TX, USA, 28 September 2005; pp. 1796–1798. [Google Scholar] [CrossRef]
- Sivakumar, R.; Sinha, P.; Bharghavan, V. CEDAR: A core-extraction distributed ad hoc routing algorithm. IEEE J. Sel. Areas Commun. 1999, 17, 1454–1465. [Google Scholar] [CrossRef]
- Ding, P.; Holliday, J.; Celik, A. Distributed Energy-Efficient Hierarchical Clustering for Wireless Sensor Networks. In Distributed Computing in Sensor Systems; Springer: Berlin/Heidelberg, Germany, 2005; pp. 322–339. [Google Scholar] [CrossRef]
- Neethirajan, S. Recent advances in wearable sensors for animal health management. Sens. Bio-Sens. Res. 2017, 12, 15–29. [Google Scholar] [CrossRef]
- Lotfinezhad, M.; Liang, B. Energy efficient clustering in sensor networks with mobile agents. In Proceedings of the IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 13–17 March 2005; pp. 1872–1877. [Google Scholar] [CrossRef]
- Morsly, Y.; Aouf, N.; Djouadi, M.S. Dynamic decentralized/centralized free conflict UAV’s team allocation. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Behera, T.M.; Mohapatra, S.K.; Samal, U.C.; Khan, M.S. Hybrid heterogeneous routing scheme for improved network performance in WSNs for animal tracking. Internet Things 2019, 6, 100047. [Google Scholar] [CrossRef]
- Rahmatizadeh, R.; Khan, S.A.; Jayasumana, A.P.; Turgut, D.; Bölöni, L. Routing towards a mobile sink using virtual coordinates in a wireless sensor network. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014; pp. 12–17. [Google Scholar] [CrossRef]
- Rahman, G.M.E.; Wahid, K.A. LDCA: Lightweight Dynamic Clustering Algorithm for IoT-Connected Wide-Area WSN and Mobile Data Sink Using LoRa. IEEE Internet Things J. 2022, 9, 1313–1325. [Google Scholar] [CrossRef]
- Wark, T.; Crossman, C.; Hu, W.; Guo, Y.; Valencia, P.; Sikka, P.; Corke, P.; Lee, C.; Henshall, J.; Prayaga, K.; et al. The Design and Evaluation of a Mobile Sensor/Actuator Network for Autonomous Animal Control. In Proceedings of the 2007 6th International Symposium on Information Processing in Sensor Networks, Cambridge, MA, USA, 25–27 April 2007; pp. 206–215. [Google Scholar] [CrossRef]
- Gu, J.; Su, T.; Wang, Q.; Du, X.; Guizani, M. Multiple Moving Targets Surveillance Based on a Cooperative Network for Multi-UAV. IEEE Commun. Mag. 2018, 56, 82–89. [Google Scholar] [CrossRef]
- Hu, J.; Turgut, A.E.; Krajnik, T.; Lennox, B.; Arvin, F. Occlusion-Based Coordination Protocol Design for Autonomous Robotic Shepherding Tasks. IEEE Trans. Cogn. Dev. Syst. 2022, 14, 126–135. [Google Scholar] [CrossRef]
- Lin, C.; Han, G.; Qi, X.; Du, J.; Xu, T.; Martínez-García, M. Energy-Optimal Data Collection for Unmanned Aerial Vehicle-Aided Industrial Wireless Sensor Network-Based Agricultural Monitoring System: A Clustering Compressed Sampling Approach. IEEE Trans. Ind. Inform. 2021, 17, 4411–4420. [Google Scholar] [CrossRef]
- Gnanasekera, M.; Katupitiya, J.; Savkin, A.V.; de Silva, A.H.T.E. A Range-Based Algorithm for Autonomous Navigation of an Aerial Drone to Approach and Follow a Herd of Cattle. Sensors 2021, 21, 7218. [Google Scholar] [CrossRef] [PubMed]
- Salami, A.F.; Anwar, F.; Priantoro, A.U. An investigation into clustering routing protocols for wireless sensor networks. Sens. Transducers 2009, 106, 48–61. [Google Scholar]
- Salami, A.F.; Bari, S.M.S.; Anwar, F.; Khan, S. Feasibility analysis of clustering routing protocols for multipurpose sensor networking. In Proceedings of the 2nd International Conference on Multimedia and Computational Intelligence (ICMCI), Wuhan, China, 29–30 September 2010; pp. 432–435. [Google Scholar]
- Astakhova, T. Research on the Energy Characteristics of Routing in Wireless Sensor Networks. In CEUR Workshop Proceedings 2020. Available online: http://ceur-ws.org/Vol-2590/short15.pdf (accessed on 20 April 2022).
- Li, X.; Huang, H.; Savkin, A.V.; Zhang, J. Robotic Herding of Farm Animals Using a Network of Barking Aerial Drones. Drones 2022, 6, 29. [Google Scholar] [CrossRef]
- Yaxley, K.J.; Joiner, K.F.; Abbass, H. Drone approach parameters leading to lower stress sheep flocking and movement: Sky shepherding. Sci. Rep. 2021, 11, 7803. [Google Scholar] [CrossRef]
- Salami, A.F.; Anwar, F.; Aibinu, A.M.; Bello-Salau, H.; Abdalla, A.H. Investigative analysis of clustering routing protocols for scalable sensor networks. In Proceedings of the 4th IEEE International Conference on Mechatronics (ICOM), Kuala Lumpur, Malaysia, 17–19 May 2011; pp. 11–15. [Google Scholar]
- Bello-Salau, H.; Salami, A.F.; Anwar, F.; Aibinu, A.M. Evaluation of Radio Propagation Techniques for Hierarchical Sensor Networks. In Proceedings of the 4th IEEE International Conference on Mechatronics (ICOM), Kuala Lumpur, Malaysia, 17–19 May 2011; pp. 001–005. [Google Scholar]
- Bello-Salau, H.; Salami, A.F.; Anwar, F.; Islam, M.R. Analysis of radio model performance for clustering sensor networks. Sens. Transducers 2011, 128, 27–38. [Google Scholar]
- Friis, H.T. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- IEEE Std 802.15.4-2020 (Revision of IEEE Std 802.15.4-2015)IEEE Standard for Low-Rate Wireless Networks; IEEE Standards Department: Piscataway, NJ, USA, 2020; pp. 1–800. [CrossRef]
- 4 GHz IEEE 802.15.4/ZigBee-ready RF Transceiver Applications. Available online: https://www.ti.com/product/CC2420 (accessed on 21 April 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| SN-DEP | SNs Deployed | 250 |
| LF-NS | LF Network Size | 2000 m × 2000 m |
| PKS | Packet Size | 500 bytes |
| ETAX TL | Energy Tax Threshold Levels | 8 |
| Etot | Total Energy of each SN (before depletion) | 2 J |
| Eidle | Idle Energy | 0.2 μJ |
| Eagg | Aggregation Energy | 5 pJ/bit |
| EEC | Electronic Circuitry Energy | 5 nJ/bit |
| CTRmax | Maximum Transmission Range | 250 m |
| A | Path Loss Exponent | 2.5 |
| SN-RS | SN Receiver Sensitivity | −95 dBm |
| MS-ALT | MS Maximum Altitude | 230 m |
| MS-V | MS Velocity | 20 m/s |
| MS-SR | MS Signaling Rate | 2 s |
| MS-TD | MS Tour Duration | 960 s |
| AVG-STAT | Simulation Runs for Statistical Averaging | 50 |
| % Gain of 230 M Over | ||
|---|---|---|
| Metric | 340 M | 120 M |
| NST | 31.58% | 12.79% |
| LBR | 61.67% | 41.42% |
| TFER | 55.86% | 75.57% |
| Metric | HYBRID | MS-DVCR |
|---|---|---|
| ENC | 25.59% | 46.48% |
| COV | 28.44% | 47.33% |
| RPK | 15.68% | 3.637% |
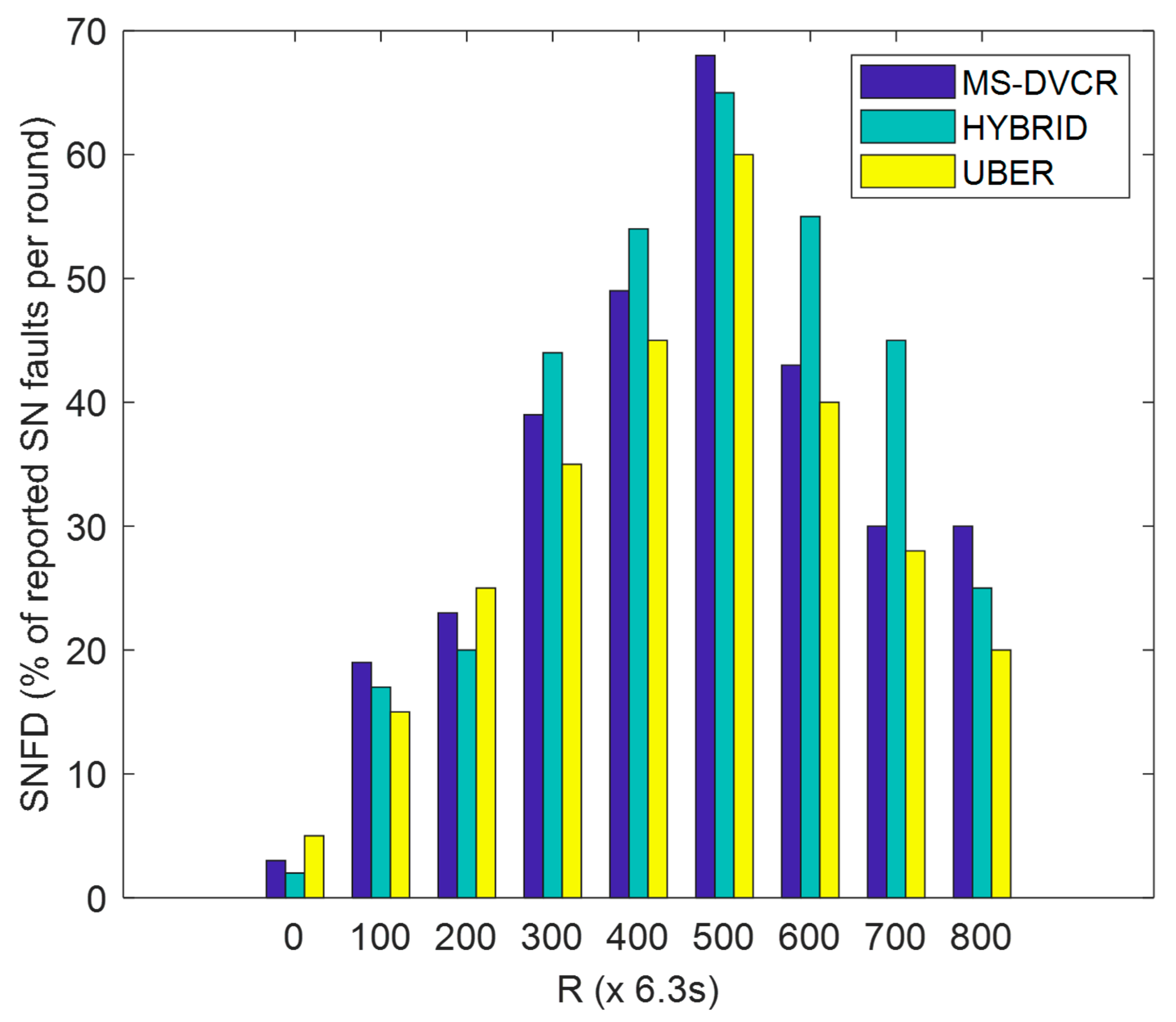
| SNFD | 19.78% | 11.35% |
| RFD | 46.44% | 44.89% |
| ROH | 29.38% | 16.45% |
| ETE | 58.56% | 54.33% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alanezi, M.A.; Salami, A.F.; Sha’aban, Y.A.; Bouchekara, H.R.E.H.; Shahriar, M.S.; Khodja, M.; Smail, M.K. UBER: UAV-Based Energy-Efficient Reconfigurable Routing Scheme for Smart Wireless Livestock Sensor Network. Sensors 2022, 22, 6158. https://doi.org/10.3390/s22166158
Alanezi MA, Salami AF, Sha’aban YA, Bouchekara HREH, Shahriar MS, Khodja M, Smail MK. UBER: UAV-Based Energy-Efficient Reconfigurable Routing Scheme for Smart Wireless Livestock Sensor Network. Sensors. 2022; 22(16):6158. https://doi.org/10.3390/s22166158
Chicago/Turabian StyleAlanezi, Mohammed A., Abdulazeez F. Salami, Yusuf A. Sha’aban, Houssem R. E. H. Bouchekara, Mohammad S. Shahriar, Mohammed Khodja, and Mostafa K. Smail. 2022. "UBER: UAV-Based Energy-Efficient Reconfigurable Routing Scheme for Smart Wireless Livestock Sensor Network" Sensors 22, no. 16: 6158. https://doi.org/10.3390/s22166158
APA StyleAlanezi, M. A., Salami, A. F., Sha’aban, Y. A., Bouchekara, H. R. E. H., Shahriar, M. S., Khodja, M., & Smail, M. K. (2022). UBER: UAV-Based Energy-Efficient Reconfigurable Routing Scheme for Smart Wireless Livestock Sensor Network. Sensors, 22(16), 6158. https://doi.org/10.3390/s22166158