
A Comprehensive Review of Endogenous EEG-Based BCIs for Dynamic Device Control

 , ,
, ,
Abstract
:1. Introduction
2. Methodology
2.1. Eligibility Criteria
2.2. Information Sources and Search Strategy
- PubMed: (EEG) AND ((Brain-Computer Interface) OR (BCI)OR(Brain-Machine Interface)OR(BMI))AND((Online)OR(Real-Time)). This search was applied to the title/abstract and text. The following filters were applied to the search results to further refine the results: “Human Subjects” and “Journal Articles”.
- IEEE Xplore: (“Full Text & Metadata”:EEG AND (“Full Text & Metadata”:“Brain-Computer Interface” OR “Full Text & Metadata”:BCI OR “Full Text & Metadata”:“Brain-Machine Interface” OR “Full Text & Metadata”:BMI) AND (“Full Text & Metadata”:“Online” OR “Full Text & Metadata”:“Real-Time”)). The search was refined to “Journal Articles”.
- Scopus: (“EEG”) AND (“Brain-Computer Interface” OR BCI OR “Brain-Machine Interface” OR “BMI”) AND (“Online” OR “Real-Time”). The search was refined through the “Type” filter, which was chosen to be “Article”, and the “Source” filter, which was chosen to be “Journal”.
2.3. Selection Process
3. Relevance of this Review
- Hekmatmanesh, 2021 [7]: Focus on brain-controlled vehicles, covering exogenous paradigms and endogenous paradigms.
- Wang, 2021 [8]: Review of BCI-controlled wheelchair systems, including electrode type, modality, and synchronicity.
- Wankhade, 2020 [9]: Focus on different EEG-based BCI paradigms, both exogenous and endogenous, and the signal-processing techniques used with them, as well as a brief discussion of online systems.
- Abiri, 2019 [10]: In-depth discussion of different EEG paradigms, including exogenous paradigms, with some discussion of signal-processing and classification techniques.
- Al-qaysi, 2018 [11]: Focused on EEG-based BCIs that drive wheelchairs, including exogenous and endogenous brain signals.
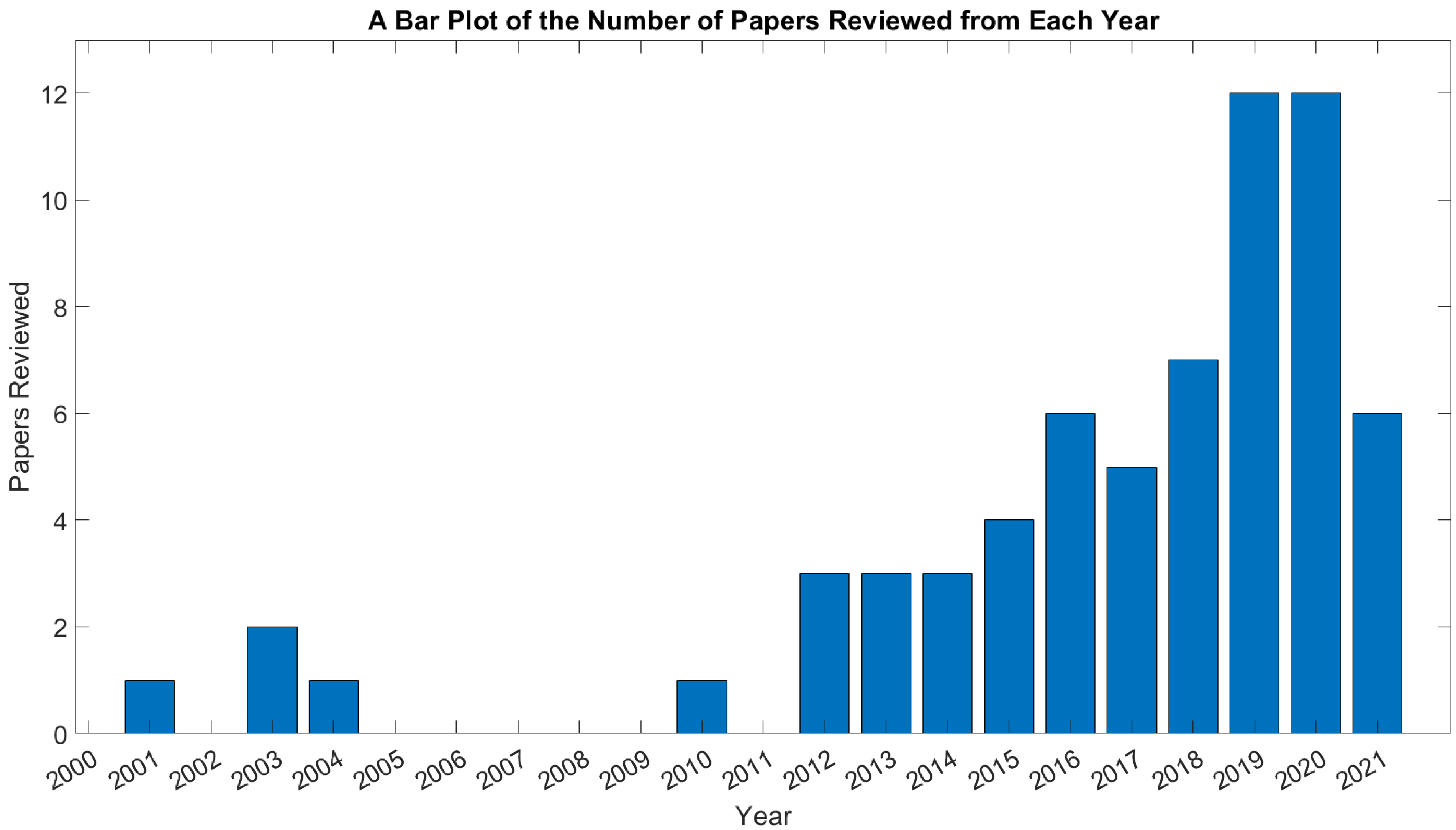
4. Overview of the Literature Growth across Time
5. Synchronous vs. Asynchronous Control
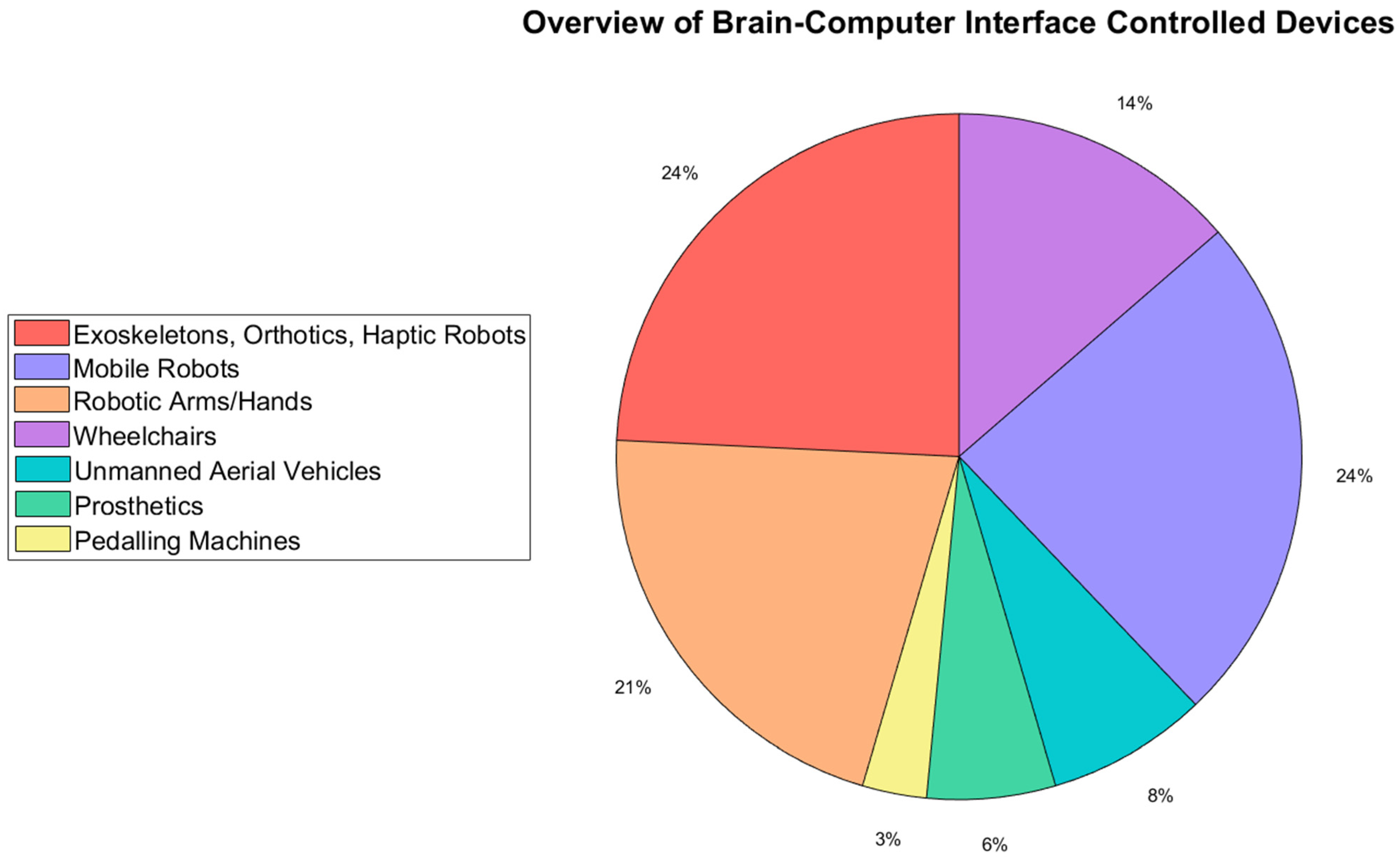
6. BCIs in the Physical World: Applications and Paradigms
6.1. Motor Imagery Paradigms

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Paradigm | Device | No. of Classes | Classes and Control Function | Accuracy |
|---|---|---|---|---|---|
| Choi, 2020 [35] | Traditional MI | Lower limb exoskeleton | 3 | Gait MI—walking; sitting MI—sitting down; idle state—no action | 86% |
| Gordleeva, 2020 [43] | 2 | MI of dominant foot—walking; idle—standing still | 78% | ||
| Wang, 2018 [44] | 3 | Left-hand MI—sitting; right-hand MI—standing up; feet MI—walking | >70% | ||
| Liu, 2017 [45] | 2 | Left-hand MI—moving left leg; right-hand MI—moving right leg | >70% | ||
| Ang, 2017 [46] | Haptic robot | 2 | MI in the stroke-affected hand; idle state | ~74% | |
| Cantillo-Negrete, 2018 [47] | Orthotic hand | 2 | MI in dominant hand (healthy subjects) or stroke-affected hand (patients)—moving; idle state—do nothing | >60% | |
| Xu, 2020 [48] | Robotic arm | 4 | Left-hand MI—turn left; right-hand MI—turn right; both hands—move up; relaxed hands—move down | 78% (for left vs. right and up vs. down experiments); 66% (for left, right, up, and down experiments) | |
| Zhang, 2019 [49] | 3 | Left-hand MI—turn left; right-hand MI—turn right; tongue MI—move forward | 73% | ||
| Xu, 2019 [50] | 2 | Left-hand MI—left planar movements; right-hand MI—right planar movements | >70% | ||
| Edelman, 2019 [42] | Robotic hand | 4 | Left-hand MI—left planar movements; right-hand MI—right planar movements; both-hands MI—upward planar movements; rest—downward planar movements | N/A | |
| Spychala, 2020 [37] | 3 | MI hand flexion or extension for similar behavior in robotic hand, idle state—maintain hand posture | ~60% | ||
| Moldoveanu, 2019 [51] | Robotic glove | 2 | Left-hand MI and right-hand MI—controlled movement of robotic glove | N/A | |
| Zhuang, 2021 [52] | Mobile robot | 4 | Left MI—turn left; right MI—turn right; push MI—accelerate; pull MI—decelerate | N/A (>80% for offline) | |
| Batres-Mendoza, 2021 [12] | 3 | Left-hand MI—turn left; right-hand MI—turn right; idle state—maintain behavior | 98% | ||
| Tonin, 2019 [13] | 2 | Left-hand MI—turn left; right-hand MI—turn right. Idle rest state inferred from probability output of classifier. | ~80% | ||
| Hasbulah, [53], 2019 | 4 | Left-hand MI—turn left; right-hand MI—turn right; left-foot movement—move forward; right-foot movement—move backward | 64% | ||
| Ai, 2019 [54] | 4 | Left-hand MI—turn left; right-hand MI—turn right; both-feet MI—move forward; tongue MI—move backward | 80% | ||
| Jafarifarmand, 2019 [55] | 2 | Left-hand MI—turn left; right-hand MI—turn right | N/A | ||
| Andreu-Perez, 2018 [14] | 2 | Left-hand MI—turn right; right-hand MI—turn left. If the probability output of the classifier was less than 80%, maintain current state. | 86% | ||
| Cardoso, 2021 [31] | Pedaling machine | 2 | Pedaling MI—cycle; idle state—remain stationary | N/A | |
| Romero-Laiseca, 2020 [56] | 2 | Pedaling MI—cycle; idle state—remain stationary | ~100% (healthy subjects); ~41.2–91.67% (stroke patients) | ||
| Gao, 2021 [40] | Prosthetic leg | 3 | Left-hand MI—walking on terrain; right-hand MI—ascending stairs; foot MI—descend stairs | N/A | |
| Yu, 2018 [1] | Sequential MI | Wheelchair | 6 | Left hand, right hand, and idle state identified by classifier. Four commands obtained by sequential paradigm, used to execute six functions through a finite-state machine: start, stop, accelerate, decelerate, turn left, turn right. | 94% |
| Jeong, 2020 [41] | Single-limb MI | Robotic arm | 6 | MI of same arm moving up, down, left, right, backward and forward, which were imitated by the robotic arm. | 66% (for a reach-and-grab task); 47% (for a beverage-drinking task) |
| Junwei, 2018 [25] | Spelling | Wheelchair | 4 | Spell the desired commands: FORWARD, BACKWARD, LEFT, RIGHT | 93% |
| Kobayashi, 2018 [57] | Self-induced emotive State | Wheelchair | 4 | Delight—move forward; anger—turn left; sorrow—turn right; pleasure—move backward. | N/A |
| Ji, 2021 [58] | Facial movement | Robotic arm | 3 | Detect double blink, long blink, and normal blink (idle state) to navigate VR menus and interfaces to control a robotic arm | N/A |
| Li, 2018 [59] | Prosthetic hand | 3 | Raised brow—hand opened; furrowed brow—hand closed; right smirk—rightward wrist rotation; left smirk—leftward wrist rotation | 81% | |
| Banach, 2021 [24] | Sequential facial movement | Wheelchair | 7 | Eyes-open and eyes-closed states identified by the classifier. Seven commands generated using three-component encodings of the states. Commands: turn left, turn right, turn left 45°, accelerate, decelerate, forward, backward. | N/A |
| Alhakeem, 2020 [60] | 6 | Eye blinks and jaw clench were used to create six commands using three-component encodings: forward, backward, stop, left, right, keep moving. | 70% |
6.2. Spelling and Induced Emotions
6.3. Facial-Movement Paradigms
6.4. Multiparadigm Systems
| Paper | Paradigm | Device | No. of Classes | Classes and Control Function | Accuracy |
|---|---|---|---|---|---|
| Ortiz, 2020 [61] | Traditional MI + attention | Lower-limb exoskeleton | 2 | Walk MI—walking; idle—just stand | Traditional MI: 63%; MI + attention: 45% |
| Tang, 2020 [2] | Traditional MI + facial movement | Wheelchair | 4 | Left-hand MI—turn left; right-hand MI—turn right; eye blink—go straight | 84% |
| Kucukyildiz, 2017 [33] | Mental arithmetic + reading | Wheelchair | 3 | Idle—turn left; mental arithmetic—turn right | N/A |
7. Shared Control
8. Obtaining Stable Control from BCI Decoders
8.1. False-Alarm Approaches
8.2. Smoothing Approaches
9. Overcoming the Limited Degrees of Freedom in Endogenous BCIs
9.1. Sequential Command Paradigms
9.2. Finite-State Machines
9.3. Hybrid BCIs: Increasing the Degrees of Freedom through Additional Biosignals
9.4. Menu Navigation with Limited Commands
10. Error Handling
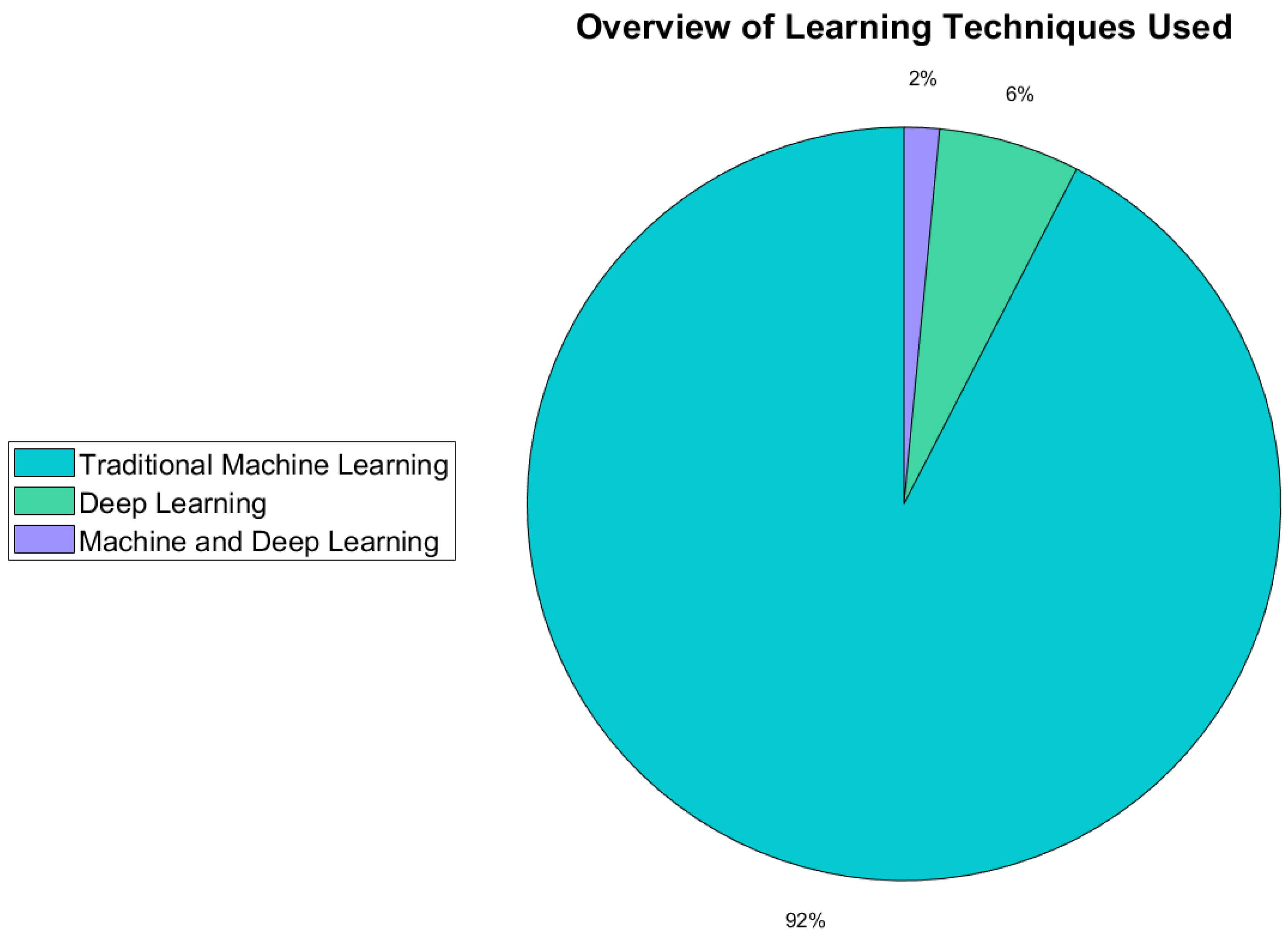
11. Signal-Processing and Classification Techniques at the Cutting Edge
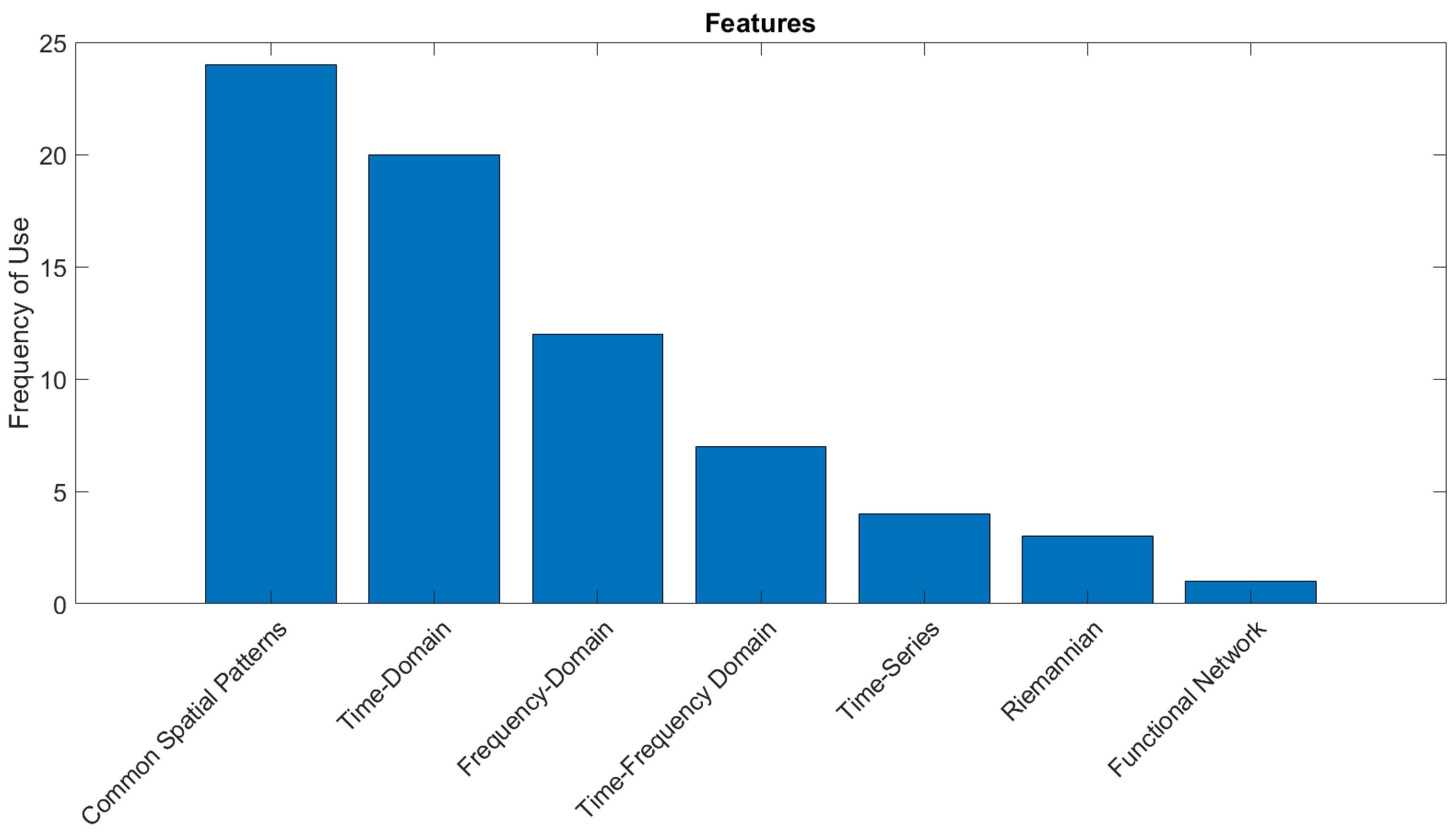
11.1. Features for Traditional Machine Learning Techniques
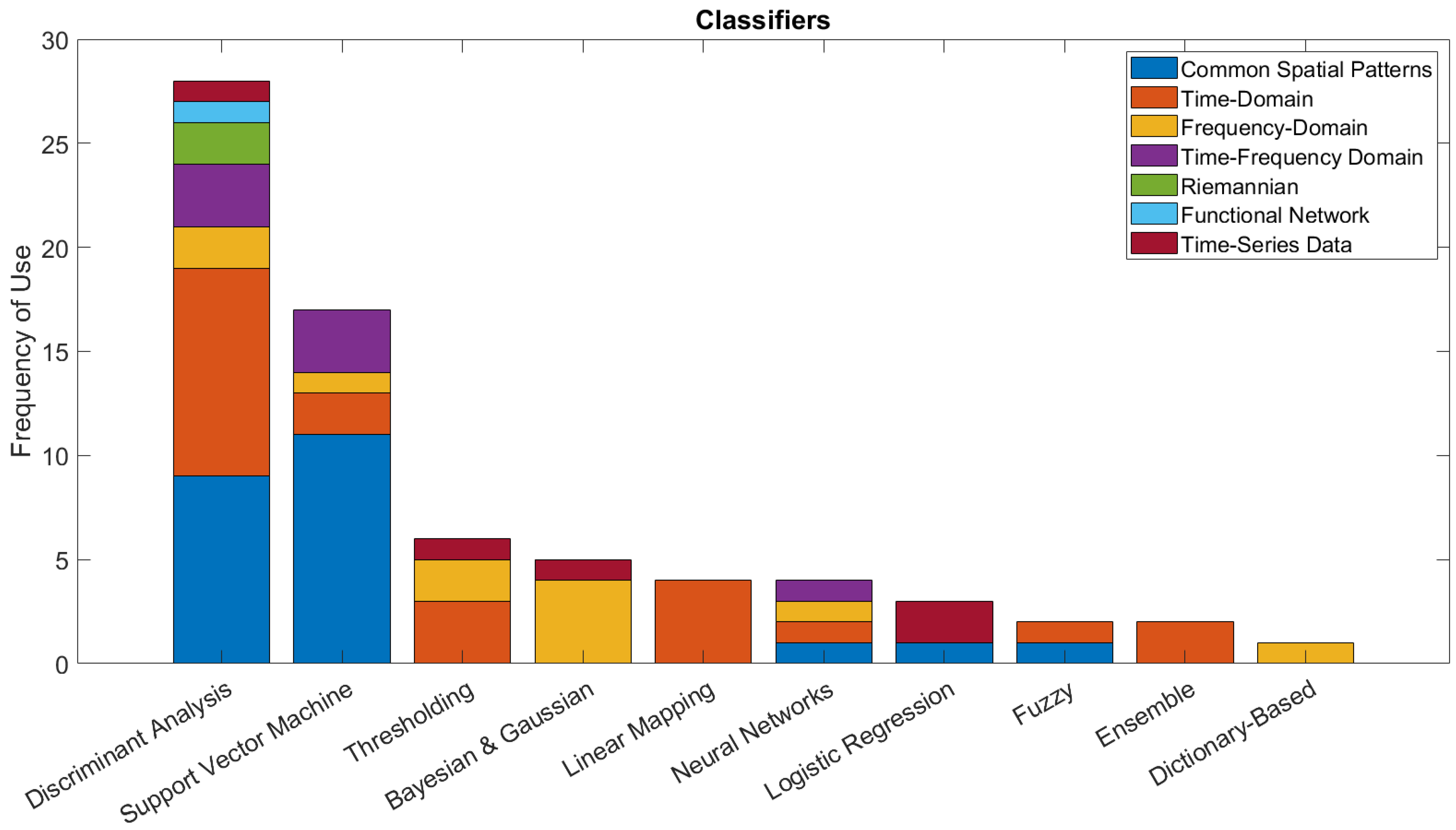
11.2. Classifiers for Traditional Machine Learning Techniques
11.3. Deep-Learning-Based Techniques
11.4. Merging Traditional Machine Learning and Deep Learning Techniques
12. Subjects
13. User-Experience Surveys
14. Conclusions: Emerging Questions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ANN | Artificial neural network |
| BCI | Brain–computer interface |
| Bi-LSTM | Bidirectional long short-term memory |
| CNN | Convolutional neural network |
| CP | Continuous pursuit |
| CSP | Common spatial patterns |
| DT | Discrete trial |
| EEG | Electroencephalogram |
| EMG | Electromyogram |
| EOG | Electrooculogram |
| ErrPs | Error-related potentials |
| fNIRS | Functional near-infrared spectroscopy |
| GUI | Graphical user interface |
| hBCI | Hybrid brain–computer interface |
| LDA | Linear discriminant analysis |
| MI | Motor imagery |
| MRCP | Movement-related cortical potentials |
| NASA-TLX | NASA Task Load Index |
| NRMSE | Normalized root-mean-square error |
| RF | Random forest |
| SLAM | Simultaneous localization and mapping |
| SMR | Sensorimotor rhythms |
| SNN | Spiking neural network |
| SSVEP | Steady-state visually evoked potentials |
| SVM | Support vector machine |
| SWAT | Subjective workload assessment technique |
| UAV | Unmanned aerial vehicle |
References
- Yu, Y.; Liu, Y.; Jiang, J.; Yin, E.; Zhou, Z.; Hu, D. An Asynchronous Control Paradigm Based on Sequential Motor Imagery and Its Application in Wheelchair Navigation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 2367–2375. [Google Scholar] [CrossRef]
- Tang, X.; Li, W.; Li, X.; Ma, W.; Dang, X. Motor Imagery EEG Recognition Based on Conditional Optimization Empirical Mode Decomposition and Multi-Scale Convolutional Neural Network. Expert Syst. Appl. 2020, 149, 113285. [Google Scholar] [CrossRef]
- Schicktanz, S.; Amelung, T.; Rieger, J.W. Qualitative Assessment of Patients’ Attitudes and Expectations toward BCIs and Implications for Future Technology Development. Front. Syst. Neurosci. 2015, 9, 64. [Google Scholar] [CrossRef] [Green Version]
- Perdikis, S.; Millan, J.d.R. Brain-Machine Interfaces: A Tale of Two Learners. IEEE Syst. Man Cybern. Mag. 2020, 6, 12–19. [Google Scholar] [CrossRef]
- Leeb, R.; Tonin, L.; Rohm, M.; Desideri, L.; Carlson, T.; Millán, J.D.R. Towards Independence: A BCI Telepresence Robot for People with Severe Motor Disabilities. Proc. IEEE 2015, 103, 969–982. [Google Scholar] [CrossRef] [Green Version]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 Statement: An Updated Guideline for Reporting Systematic Reviews. BMJ 2021, 10, 89. [Google Scholar] [CrossRef]
- Hekmatmanesh, A.; Nardelli, P.H.J.; Handroos, H. Review of the State-of-the-Art of Brain-Controlled Vehicles. IEEE Access 2021, 9, 110173–110193. [Google Scholar] [CrossRef]
- Wang, H.; Yan, F.; Xu, T.; Yin, H.; Chen, P.; Yue, H.; Chen, C.; Zhang, H.; Xu, L.; He, Y.; et al. Brain-Controlled Wheelchair Review: From Wet Electrode to Dry Electrode, From Single Modal to Hybrid Modal, From Synchronous to Asynchronous. IEEE Access 2021, 9, 55920–55938. [Google Scholar] [CrossRef]
- Wankhade, M.M.; Chorage, S.S. An Empirical Survey of Electroencephalography-Based Brain-Computer Interfaces. Bio-Algorithms Med-Syst. 2020, 16, 20190053. [Google Scholar] [CrossRef]
- Abiri, R.; Borhani, S.; Sellers, E.W.; Jiang, Y.; Zhao, X. A Comprehensive Review of EEG-Based Brain-Computer Interface Paradigms. J. Neural Eng. 2019, 16, 011001. [Google Scholar] [CrossRef]
- Al-Qaysi, Z.T.; Zaidan, B.B.; Zaidan, A.A.; Suzani, M.S. A Review of Disability EEG Based Wheelchair Control System: Coherent Taxonomy, Open Challenges and Recommendations. Comput. Methods Programs Biomed. 2018, 164, 221–237. [Google Scholar] [CrossRef]
- Batres-Mendoza, P.; Guerra-Hernandez, E.I.; Espinal, A.; Perez-Careta, E.; Rostro-Gonzalez, H. Biologically-Inspired Legged Robot Locomotion Controlled with a BCI by Means of Cognitive Monitoring. IEEE Access 2021, 9, 35766–35777. [Google Scholar] [CrossRef]
- Tonin, L.; Bauer, F.C.; Millán, J.d.R. The Role of the Control Framework for Continuous Teleoperation of a Brain–Machine Interface-Driven Mobile Robot. IEEE Trans. Robot. 2019, 36, 78–91. [Google Scholar] [CrossRef]
- Andreu-Perez, J.; Cao, F.; Hagras, H.; Yang, G.Z. A Self-Adaptive Online Brain-Machine Interface of a Humanoid Robot Through a General Type-2 Fuzzy Inference System. IEEE Trans. Fuzzy Syst. 2018, 26, 101–116. [Google Scholar] [CrossRef] [Green Version]
- Pfurtscheller, G.; Neuper, C. Motor Imagery and Direct Brain-Computer Communication. Proc. IEEE 2001, 89, 1123–1134. [Google Scholar] [CrossRef]
- Millán, J.d.R.; Mouriño, J. Asynchronous BCI and Local Neural Classifiers: An Overview of the Adaptive Brain Interface Project. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 159–161. [Google Scholar] [CrossRef] [Green Version]
- Millán, J.D.R.; Renkens, F.; Mouriño, J.; Gerstner, W. Noninvasive Brain-Actuated Control of a Mobile Robot by Human EEG. IEEE Trans. Biomed. Eng. 2004, 51, 1026–1033. [Google Scholar] [CrossRef] [Green Version]
- Müller-Putz, G.R.; Scherer, R.; Pfurtscheller, G.; Neuper, C. Temporal Coding of Brain Patterns for Direct Limb Control in Humans. Front. Neurosci. 2010, 4, 34. [Google Scholar] [CrossRef] [Green Version]
- Pfurtscheller, G.; Neuper, C.; Muüller, G.R.; Obermaier, B.; Krausz, G.; Schloögl, A.; Scherer, R.; Graimann, B.; Keinrath, C.; Skliris, D.; et al. Graz-BCI: State of the Art and Clinical Applications. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 177–180. [Google Scholar] [CrossRef]
- Dornhege, G.; Blankertz, B.; Curio, G.; Müller, K.R. Boosting Bit Rates in Noninvasive EEG Single-Trial Classifications by Feature Combination and Multiclass Paradigms. IEEE Trans. Biomed. Eng. 2004, 51, 993–1002. [Google Scholar] [CrossRef]
- Tangermann, M.; Müller, K.R.; Aertsen, A.; Birbaumer, N.; Braun, C.; Brunner, C.; Leeb, R.; Mehring, C.; Miller, K.J.; Müller-Putz, G.R.; et al. Review of the BCI Competition IV. Front. Neurosci. 2012, 6, 55. [Google Scholar] [CrossRef] [Green Version]
- Technische Universität Berlin. BCI Competition III. Available online: http://www.bbci.de/competition/iii/ (accessed on 18 December 2019).
- Blankertz, B. BCI Competition IV. Available online: www.bbci.de/competition/iv/#dataset2a (accessed on 5 August 2021).
- Banach, K.; Małecki, M.; Rosół, M.; Broniec, A. Brain-Computer Interface for Electric Wheelchair Based on Alpha Waves of EEG Signal. Bio-Algorithms Med-Syst. 2021, 17, 165–172. [Google Scholar] [CrossRef]
- Junwei, L.; Ramkumar, S.; Emayavaramban, G.; Vinod, D.F.; Thilagaraj, M.; Muneeswaran, V.; Pallikonda Rajasekaran, M.; Venkataraman, V.; Hussein, A.F. Brain Computer Interface for Neurodegenerative Person Using Electroencephalogram. IEEE Access 2019, 7, 2439–2452. [Google Scholar] [CrossRef]
- Kim, B.H.; Kim, M.; Jo, S. Quadcopter Flight Control Using a Low-Cost Hybrid Interface with EEG-Based Classification and Eye Tracking. Comput. Biol. Med. 2014, 51, 82–92. [Google Scholar] [CrossRef]
- LaFleur, K.; Cassady, K.; Doud, A.; Shades, K.; Rogin, E.; He, B. Quadcopter Control in Three-Dimensional Space Using a Noninvasive Motor Imagery-Based Brain-Computer Interface. J. Neural Eng. 2013, 10, 046003. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.J.; Hong, K.S. Hybrid EEG-FNIRS-Based Eight-Command Decoding for BCI: Application to Quadcopter Control. Front. Neurorobotics 2017, 11, 6. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Zhou, P.; Belkacem, A.N.; Lu, L.; Xu, R.; Wang, X.; Tan, W.; Qiao, Z.; Li, P.; Gao, Q.; et al. Quadcopter Robot Control Based on Hybrid Brain-Computer Interface System. Sens. Mater. 2020, 32, 991–1004. [Google Scholar] [CrossRef] [Green Version]
- Shi, T.; Wang, H.; Zhang, C. Brain Computer Interface System Based on Indoor Semi-Autonomous Navigation and Motor Imagery for Unmanned Aerial Vehicle Control. Expert Syst. Appl. 2015, 42, 4196–4206. [Google Scholar] [CrossRef]
- Cardoso, V.F.; Delisle-Rodriguez, D.; Romero-Laiseca, M.A.; Loterio, F.A.; Gurve, D.; Floriano, A.; Valadão, C.; Silva, L.; Krishnan, S.; Frizera-Neto, A.; et al. Effect of a Brain–Computer Interface Based on Pedaling Motor Imagery on Cortical Excitability and Connectivity. Sensors 2021, 21, 2020. [Google Scholar] [CrossRef]
- Zecca, M.; Micera, S.; Carrozza, M.C.; Dario, P. Control of Multifunctional Prosthetic Hands by Processing the Electromyographic Signal. Crit. Rev. Biomed. Eng. 2002, 30, 459–485. [Google Scholar] [CrossRef] [Green Version]
- Kucukyildiz, G.; Ocak, H.; Karakaya, S.; Sayli, O. Design and Implementation of a Multi Sensor Based Brain Computer Interface for a Robotic Wheelchair. J. Intell. Robot. Syst. Theory Appl. 2017, 87, 247–263. [Google Scholar] [CrossRef]
- Soekadar, S.R.; Witkowski, M.; Gómez, C.; Opisso, E.; Medina, J.; Cortese, M.; Cempini, M.; Carrozza, M.C.; Cohen, L.G.; Birbaumer, N.; et al. Hybrid EEG/EOG-Based Brain/Neural Hand Exoskeleton Restores Fully Independent Daily Living Activities after Quadriplegia. Sci. Robot. 2016, 1, eaag3296. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, J.; Kim, K.T.; Jeong, J.H.; Kim, L.; Lee, S.J.; Kim, H. Developing a Motor Imagery-Based Real-Time Asynchronous Hybrid BCI Controller for a Lower-Limb Exoskeleton. Sensors 2020, 20, 7309. [Google Scholar] [CrossRef] [PubMed]
- Cardoso, V.F.; Delisle-Rodriguez, D.; Romero-Laiseca, M.A.; Loterio, F.A.; Gurve, D.; Floriano, A.; Krishnan, S.; Frizera-Neto, A.; Filho, T.F.B. BCI Based on Pedal End-Effector Triggered through Pedaling Imagery to Promote Excitability over the Feet Motor Area. Res. Biomed. Eng. 2022, 38, 439–449. [Google Scholar] [CrossRef]
- Spychala, N.; Debener, S.; Bongartz, E.; Müller, H.H.O.; Thorne, J.D.; Philipsen, A.; Braun, N. Exploring Self-Paced Embodiable Neurofeedback for Post-Stroke Motor Rehabilitation. Front. Hum. Neurosci. 2020, 13, 461. [Google Scholar] [CrossRef] [Green Version]
- Meng, J.; Zhang, S.; Bekyo, A.; Olsoe, J.; Baxter, B.; He, B. Noninvasive Electroencephalogram Based Control of a Robotic Arm for Reach and Grasp Tasks. Sci. Rep. 2016, 6, 38565. [Google Scholar] [CrossRef] [Green Version]
- Müller-Putz, G.; Rupp, R. The EEG-Controlled MoreGrasp Grasp Neuroprosthesis for Individuals with High Spinal Cord Injury—Multipad Electrodes for Screening and Closed-Loop Grasp Pattern Control. In Proceedings of the International Functional Electrical Stimulation Society 21st Annual Conference, London, UK, 17–20 July 2017. [Google Scholar]
- Gao, H.; Luo, L.; Pi, M.; Li, Z.; Li, Q.; Zhao, K.; Huang, J. EEG-Based Volitional Control of Prosthetic Legs for Walking in Different Terrains. IEEE Trans. Autom. Sci. Eng. 2021, 18, 530–540. [Google Scholar] [CrossRef]
- Jeong, J.H.; Shim, K.H.; Kim, D.J.; Lee, S.W. Brain-Controlled Robotic Arm System Based on Multi-Directional CNN-BiLSTM Network Using EEG Signals. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1226–1238. [Google Scholar] [CrossRef]
- Edelman, B.J.; Meng, J.; Suma, D.; Zurn, C.; Nagarajan, E.; Baxter, B.S.; Cline, C.C. Noninvasive Neuroimaging Enhances Continuous Neural Tracking for Robotic Device Control. Sci. Robot. 2019, 4, eaaw6844. [Google Scholar] [CrossRef]
- Gordleeva, S.Y.; Lobov, S.A.; Grigorev, N.A.; Savosenkov, A.O.; Shamshin, M.O.; Lukoyanov, M.V.; Khoruzhko, M.A.; Kazantsev, V.B. Real-Time EEG-EMG Human-Machine Interface-Based Control System for a Lower-Limb Exoskeleton. IEEE Access 2020, 8, 84070–84081. [Google Scholar] [CrossRef]
- Wang, C.; Wu, X.; Wang, Z.; Ma, Y. Implementation of a Brain-Computer Interface on a Lower-Limb Exoskeleton. IEEE Access 2018, 6, 38524–38534. [Google Scholar] [CrossRef]
- Liu, D.; Chen, W.; Pei, Z.; Wang, J. A Brain-Controlled Lower-Limb Exoskeleton for Human Gait Training. Rev. Sci. Instrum. 2017, 88, 104302. [Google Scholar] [CrossRef]
- Ang, K.K.; Guan, C. EEG-Based Strategies to Detect Motor Imagery for Control and Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 392–401. [Google Scholar] [CrossRef] [PubMed]
- Cantillo-Negrete, J.; Carino-Escobar, R.I.; Carrillo-Mora, P.; Elias-Vinas, D.; Gutierrez-Martinez, J. Motor Imagery-Based Brain-Computer Interface Coupled to a Robotic Hand Orthosis Aimed for Neurorehabilitation of Stroke Patients. J. Healthc. Eng. 2018, 2018, 1624637. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, B.; Li, W.; He, X.; Wei, Z.; Zhang, D.; Wu, C.; Song, A. Motor Imagery Based Continuous Teleoperation Robot Control with Tactile Feedback. Electronics 2020, 9, 174. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Sun, F.; Wu, H.; Tan, C.; Ma, Y. Asynchronous Brain-Computer Interface Shared Control of Robotic Grasping. Tsinghua Sci. Technol. 2019, 24, 360–370. [Google Scholar] [CrossRef]
- Xu, Y.; Ding, C.; Shu, X.; Gui, K.; Bezsudnova, Y.; Sheng, X.; Zhang, D. Shared Control of a Robotic Arm Using Non-Invasive Brain–Computer Interface and Computer Vision Guidance. Robot. Auton. Syst. 2019, 115, 121–129. [Google Scholar] [CrossRef]
- Moldoveanu, A.; Ferche, O.M.; Moldoveanu, F.; Lupu, R.G.; Cinteza, D.; Constantin Irimia, D.; Toader, C. The TRAVEE System for a Multimodal Neuromotor Rehabilitation. IEEE Access 2019, 7, 8151–8171. [Google Scholar] [CrossRef]
- Zhuang, J.; Geng, K.; Yin, G. Ensemble Learning Based Brain-Computer Interface System for Ground Vehicle Control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5392–5404. [Google Scholar] [CrossRef]
- Haziq Hasbulah, M.; Azni Jafar, F.; Hisham Nordin, M.; Yokota, K.; Tuah Jaya, H.; Tunggal, D. Brain-Controlled for Changing Modular Robot Configuration by Employing Neurosky’s Headset. (IJACSA) Int. J. Adv. Comput. Sci. Appl. 2019, 10, 114–120. [Google Scholar] [CrossRef]
- Ai, Q.; Chen, A.; Chen, K.; Liu, Q.; Zhou, T.; Xin, S.; Ji, Z. Feature Extraction of Four-Class Motor Imagery EEG Signals Based on Functional Brain Network. J. Neural Eng. 2019, 16, 026032. [Google Scholar] [CrossRef]
- Jafarifarmand, A.; Badamchizadeh, M.A. EEG Artifacts Handling in a Real Practical Brain-Computer Interface Controlled Vehicle. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1200–1208. [Google Scholar] [CrossRef]
- Romero-Laiseca, M.A.; Delisle-Rodriguez, D.; Cardoso, V.; Gurve, D.; Loterio, F.; Posses Nascimento, J.H.; Krishnan, S.; Frizera-Neto, A.; Bastos-Filho, T. A Low-Cost Lower-Limb Brain-Machine Interface Triggered by Pedaling Motor Imagery for Post-Stroke Patients Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 988–996. [Google Scholar] [CrossRef]
- Kobayashi, N.; Nakagawa, M. BCI-Based Control of Electric Wheelchair Using Fractal Characteristics of EEG. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 1795–1803. [Google Scholar] [CrossRef]
- Ji, Z.; Liu, Q.; Xu, W.; Yao, B.; Liu, J.; Zhou, Z. A Closed-Loop Brain-Computer Interface with Augmented Reality Feedback for Industrial Human-Robot Collaboration. Int. J. Adv. Manuf. Technol. 2021, 116, 1–16. [Google Scholar] [CrossRef]
- Li, R.; Zhang, X.; Lu, Z.; Liu, C.; Li, H.; Sheng, W.; Odekhe, R. An Approach for Brain-Controlled Prostheses Based on a Facial Expression Paradigm. Front. Neurosci. 2018, 12, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Alhakeem, Z.M.; Ali, R.S.; Abd-Alhameed, R.A. Wheelchair Free Hands Navigation Using Robust DWT-AR Features Extraction Method with Muscle Brain Signals. IEEE Access 2020, 8, 64266–64277. [Google Scholar] [CrossRef]
- Ortiz, M.; Ferrero, L.; Iáñez, E.; Azorín, J.M.; Contreras-Vidal, J.L. Sensory Integration in Human Movement: A New Brain-Machine Interface Based on Gamma Band and Attention Level for Controlling a Lower-Limb Exoskeleton. Front. Bioeng. Biotechnol. 2020, 8, 735. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, Y.; Chen, L.; Gu, B.; Liu, S.; Xu, M.; Qi, H.; He, F.; Ming, D. A BCI Based Visual-Haptic Neurofeedback Training Improves Cortical Activations and Classification Performance during Motor Imagery. J. Neural Eng. 2019, 16, 066012. [Google Scholar] [CrossRef]
- Liu, Y.; Su, W.; Li, Z.; Shi, G.; Chu, X.; Kang, Y.; Shang, W. Motor-Imagery-Based Teleoperation of a Dual-Arm Robot Performing Manipulation Tasks. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 414–424. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid Brain/Muscle Signals Powered Wearable Walking Exoskeleton Enhancing Motor Ability in Climbing Stairs Activity. IEEE Trans. Med. Robot. Bionics 2019, 1, 218–227. [Google Scholar] [CrossRef]
- Menon, V.G.; Jacob, S.; Joseph, S.; Almagrabi, A.O. SDN-Powered Humanoid with Edge Computing for Assisting Paralyzed Patients. IEEE Internet Things J. 2020, 7, 5874–5881. [Google Scholar] [CrossRef]
- Li, J.; Li, Z.; Feng, Y.; Liu, Y.; Shi, G. Development of a Human-Robot Hybrid Intelligent System Based on Brain Teleoperation and Deep Learning SLAM. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1664–1674. [Google Scholar] [CrossRef]
- Gandhi, V.; Prasad, G.; Coyle, D.; Behera, L.; McGinnity, T.M. EEG-Based Mobile Robot Control through an Adaptive Brain-Robot Interface. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 1278–1285. [Google Scholar] [CrossRef]
- Li, T.; Hong, J.; Zhang, J.; Guo, F. Brain-Machine Interface Control of a Manipulator Using Small-World Neural Network and Shared Control Strategy. J. Neurosci. Methods 2014, 224, 26–38. [Google Scholar] [CrossRef]
- Kim, Y.J.; Nam, H.S.; Lee, W.H.; Seo, H.G.; Leigh, J.H.; Oh, B.M.; Bang, M.S.; Kim, S. Vision-Aided Brain-Machine Interface Training System for Robotic Arm Control and Clinical Application on Two Patients with Cervical Spinal Cord Injury. BioMedical Eng. Online 2019, 18, 14. [Google Scholar] [CrossRef] [Green Version]
- Frisoli, A.; Loconsole, C.; Leonardis, D.; Bannò, F.; Barsotti, M.; Chisari, C.; Bergamasco, M. A New Gaze-BCI-Driven Control of an Upper Limb Exoskeleton for Rehabilitation in Real-World Tasks. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 1169–1179. [Google Scholar] [CrossRef]
- Zhang, R.; Li, Y.; Yan, Y.; Zhang, H.; Wu, S.; Yu, T.; Gu, Z. Control of a Wheelchair in an Indoor Environment Based on a Brain-Computer Interface and Automated Navigation. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 128–139. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Konar, A.; Tibarewala, D.N. Motor Imagery and Error Related Potential Induced Position Control of a Robotic Arm. IEEE/CAA J. Autom. Sin. 2017, 4, 639–650. [Google Scholar] [CrossRef]
- Chae, Y.; Jeong, J.; Jo, S. Toward Brain-Actuated Humanoid Robots: Asynchronous Direct Control Using an EEG-Based BCI. IEEE Trans. Robot. 2012, 28, 1131–1144. [Google Scholar] [CrossRef]
- Hortal, E.; Planelles, D.; Costa, A.; Iáñez, E.; Úbeda, A.; Azorín, J.M.; Fernández, E. SVM-Based Brain-Machine Interface for Controlling a Robot Arm through Four Mental Tasks. Neurocomputing 2015, 151, 116–121. [Google Scholar] [CrossRef]
- Do, A.H.; Wang, P.T.; King, C.E.; Chun, S.N.; Nenadic, Z. Brain-Computer Interface Controlled Robotic Gait Orthosis. J. Neuroeng. Rehabil. 2013, 10, 111. [Google Scholar] [CrossRef] [Green Version]
- Hong, K.S.; Khan, M.J.; Hong, M.J. Feature Extraction and Classification Methods for Hybrid FNIRS-EEG Brain-Computer Interfaces. Front. Hum. Neurosci. 2018, 12, 246. [Google Scholar] [CrossRef]
- Ehrlich, S.K.; Cheng, G. A Feasibility Study for Validating Robot Actions Using EEG-Based Error-Related Potentials. Int. J. Soc. Robot. 2019, 11, 271–283. [Google Scholar] [CrossRef]
- Padfield, N.; Zabalza, J.; Zhao, H.; Masero, V.; Ren, J. EEG-Based Brain-Computer Interfaces Using Motor-Imagery: Techniques and Challenges. Sensors 2019, 19, 1423. [Google Scholar] [CrossRef] [Green Version]
- Ang, K.K.; Chin, Z.Y.; Wang, C.; Guan, C.; Zhang, H. Filter Bank Common Spatial Pattern Algorithm on BCI Competition IV Datasets 2a and 2b. Front. Neurosci. 2012, 6, 39. [Google Scholar] [CrossRef] [Green Version]
- Wankar, R.V.; Shah, P.; Sutar, R. Feature Extraction and Selection Methods for Motor Imagery EEG Signals: A Review. In Proceedings of the 2017 IEEE International Conference on Intelligent Computing and Control (I2C2), Coimbatore, India, 23–24 June 2017; pp. 1–9. [Google Scholar]
- Bozinovski, S.; Bozinovski, A. Mental States, EEG Manifestations, and Mentally Emulated Digital Circuits for Brain-Robot Interaction. IEEE Trans. Auton. Ment. Dev. 2015, 7, 39–51. [Google Scholar] [CrossRef]
- Arnin, J.; Kahani, D.; Lakany, H.; Conway, B.A. Evaluation of Different Signal Processing Methods in Time and Frequency Domain for Brain-Computer Interface Applications. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, Honolulu, HI, USA, 17–21 July 2018; pp. 235–238. [Google Scholar] [CrossRef] [Green Version]
- Pfurtscheller, G.; Lopes Da Silva, F.H. Event-Related EEG/MEG Synchronization and Desynchronization: Basic Principles. Clin. Neurophysiol. 1999, 110, 1842–1857. [Google Scholar] [CrossRef]
- He, W.; Zhao, Y.; Tang, H.; Sun, C.; Fu, W. A Wireless BCI and BMI System for Wearable Robots. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 936–946. [Google Scholar] [CrossRef]
- Xu, B.; Lu, W.; Song, A.; Yang, R.; Pan, L.; Zeng, H.; Xu, G. Online Classification of Single Trial Motor Imagery Electroencephalogram Signals. Int. Inf. Inst. (Tokyo) Inf. 2013, 16, 3543–3560. [Google Scholar]
- Tang, Z.; Sun, S.; Zhang, S.; Chen, Y.; Li, C.; Chen, S. A Brain-Machine Interface Based on ERD/ERS for an Upper-Limb Exoskeleton Control. Sensors 2016, 16, 2050. [Google Scholar] [CrossRef] [Green Version]
- Lo, M.-T.; Tsai, P.-H.; Lin, P.-F.; Lin, C.; Hsin, Y.L. The nonlinear and nonstationary properties in eeg signals: Probing the complex fluctuations by hilbert–huang transform. Adv. Adapt. Data Anal. 2009, 1, 461–482. [Google Scholar] [CrossRef]
- Raza, H.; Rathee, D.; Zhou, S.M.; Cecotti, H.; Prasad, G. Covariate Shift Estimation Based Adaptive Ensemble Learning for Handling Non-Stationarity in Motor Imagery Related EEG-Based Brain-Computer Interface. Neurocomputing 2019, 343, 154–166. [Google Scholar] [CrossRef]
- Zheng, L.; Feng, W.; Ma, Y.; Lian, P.; Xiao, Y.; Yi, Z.; Wu, X. Ensemble Learning Method Based on Temporal, Spatial Features with Multi-Scale Filter Banks for Motor Imagery EEG Classification. Biomed. Signal Process. Control 2022, 76, 103634. [Google Scholar] [CrossRef]
- Zuo, C.; Jin, J.; Xu, R.; Wu, L.; Liu, C.; Miao, Y.; Wang, X. Cluster Decomposing and Multi-Objective Optimization Based-Ensemble Learning Framework for Motor Imagery-Based Brain-Computer Interfaces. J. Neural Eng. 2021, 18, 026018. [Google Scholar] [CrossRef]
- Baig, M.Z.; Aslam, N.; Shum, H.P.H.; Zhang, L. Differential Evolution Algorithm as a Tool for Optimal Feature Subset Selection in Motor Imagery EEG. Expert Syst. Appl. 2017, 90, 184–195. [Google Scholar] [CrossRef]
- Ehrlich, S.K.; Cheng, G. Human-Agent Co-Adaptation Using Error-Related Potentials. J. Neural Eng. 2018, 15, 066014. [Google Scholar] [CrossRef]
- Lawhern, V.J.; Solon, A.J.; Waytowich, N.R.; Gordon, S.M.; Hung, C.P.; Lance, B.J. EEGNet: A Compact Convolutional Neural Network for EEG-Based Brain-Computer Interfaces. J. Neural Eng. 2018, 15, 056013. [Google Scholar] [CrossRef] [Green Version]
- Schirrmeister, R.T.; Springenberg, J.T.; Fiederer, L.D.J.; Glasstetter, M.; Eggensperger, K.; Tangermann, M.; Hutter, F.; Burgard, W.; Ball, T. Deep Learning with Convolutional Neural Networks for EEG Decoding and Visualization. Hum. Brain Mapp. 2017, 38, 5391–5420. [Google Scholar] [CrossRef] [Green Version]
- Bishop, C.M. Pattern Regonition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Kasabov, N.K. NeuCube: A Spiking Neural Network Architecture for Mapping, Learning and Understanding of Spatio-Temporal Brain Data. Neural Netw. 2014, 52, 62–76. [Google Scholar] [CrossRef]
- So, P.; Gore, B. NASA TLX. Available online: https://humansystems.arc.nasa.gov/groups/tlx/ (accessed on 24 May 2022).
- Rubio, S.; Díaz, E.; Martín, J.; Puente, J.M. Evaluation of Subjective Mental Workload: A Comparison of SWAT, NASA-TLX, and Workload Profile Methods. Appl. Psychol. 2004, 53, 61–86. [Google Scholar] [CrossRef]
- Sereshkeh, A.R.; Trott, R.; Bricout, A.; Chau, T. Online EEG Classification of Covert Speech for Brain-Computer Interfacing. Int. J. Neural Syst. 2017, 27, 1750033. [Google Scholar] [CrossRef] [PubMed]
- Sabudin, E.N.; Omar, R.; Che Ku Melor, C.K.A.N.H. Potential Field Methods and Their Inherent Approaches for Path Planning. ARPN J. Eng. Appl. Sci. 2016, 11, 10801–10805. [Google Scholar]




| Paper | Condition | Number of Subjects |
|---|---|---|
| Spychala, 2020 [37] | Stroke | 7 |
| Romero-Laiseca, 2020 [56] | 2 | |
| Moldoveanu, 2019 [51] | 32 | |
| Cantillo-Negrete, 2018 [47] | 6 | |
| Ang, 2018 [46] | 9 | |
| Frisoli, 2012 [70] | 4 | |
| Soekadar, 2016 [34] | 6 | |
| Do, 2013 [75] | Paraplegia or tetraplegia | 10 |
| Pfurscheller, 2003 [19] | 1 | |
| Pfurscheller, 2001 [15] | 1 | |
| Kim, 2019 [69] | Spinal injury | 2 |
| Junewi, 2019 [25] | Neurodegenerative disease | 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Padfield, N.; Camilleri, K.; Camilleri, T.; Fabri, S.; Bugeja, M. A Comprehensive Review of Endogenous EEG-Based BCIs for Dynamic Device Control. Sensors 2022, 22, 5802. https://doi.org/10.3390/s22155802
Padfield N, Camilleri K, Camilleri T, Fabri S, Bugeja M. A Comprehensive Review of Endogenous EEG-Based BCIs for Dynamic Device Control. Sensors. 2022; 22(15):5802. https://doi.org/10.3390/s22155802
Chicago/Turabian StylePadfield, Natasha, Kenneth Camilleri, Tracey Camilleri, Simon Fabri, and Marvin Bugeja. 2022. "A Comprehensive Review of Endogenous EEG-Based BCIs for Dynamic Device Control" Sensors 22, no. 15: 5802. https://doi.org/10.3390/s22155802
APA StylePadfield, N., Camilleri, K., Camilleri, T., Fabri, S., & Bugeja, M. (2022). A Comprehensive Review of Endogenous EEG-Based BCIs for Dynamic Device Control. Sensors, 22(15), 5802. https://doi.org/10.3390/s22155802