
Data Acquisition System for On-the-Go Soil Resistance Force Sensor Using Soil Cutting Blades


 , ,
, ,
Abstract
:1. Introduction
- -
- Electrical and electromagnetic sensors measure electrical resistivity/conductivity, capacitance or inductance affected by the composition of tested soil;
- -
- Optical and radiometric sensors use electromagnetic waves to detect the level of energy absorbed/reflected by soil particles;
- -
- Mechanical sensors measure forces resulting from a tool engaged with the soil;
- -
- Acoustic sensors quantify the sound produced by a tool interacting with the soil;
- -
- Pneumatic sensors assess the ability to inject air into the soil;
- -
- Electrochemical sensors use ion-selective membranes that produce a voltage output in response to the activity of selected ions (H+, K+, NO3−, Na+, etc.) [1].
2. Materials and Methods
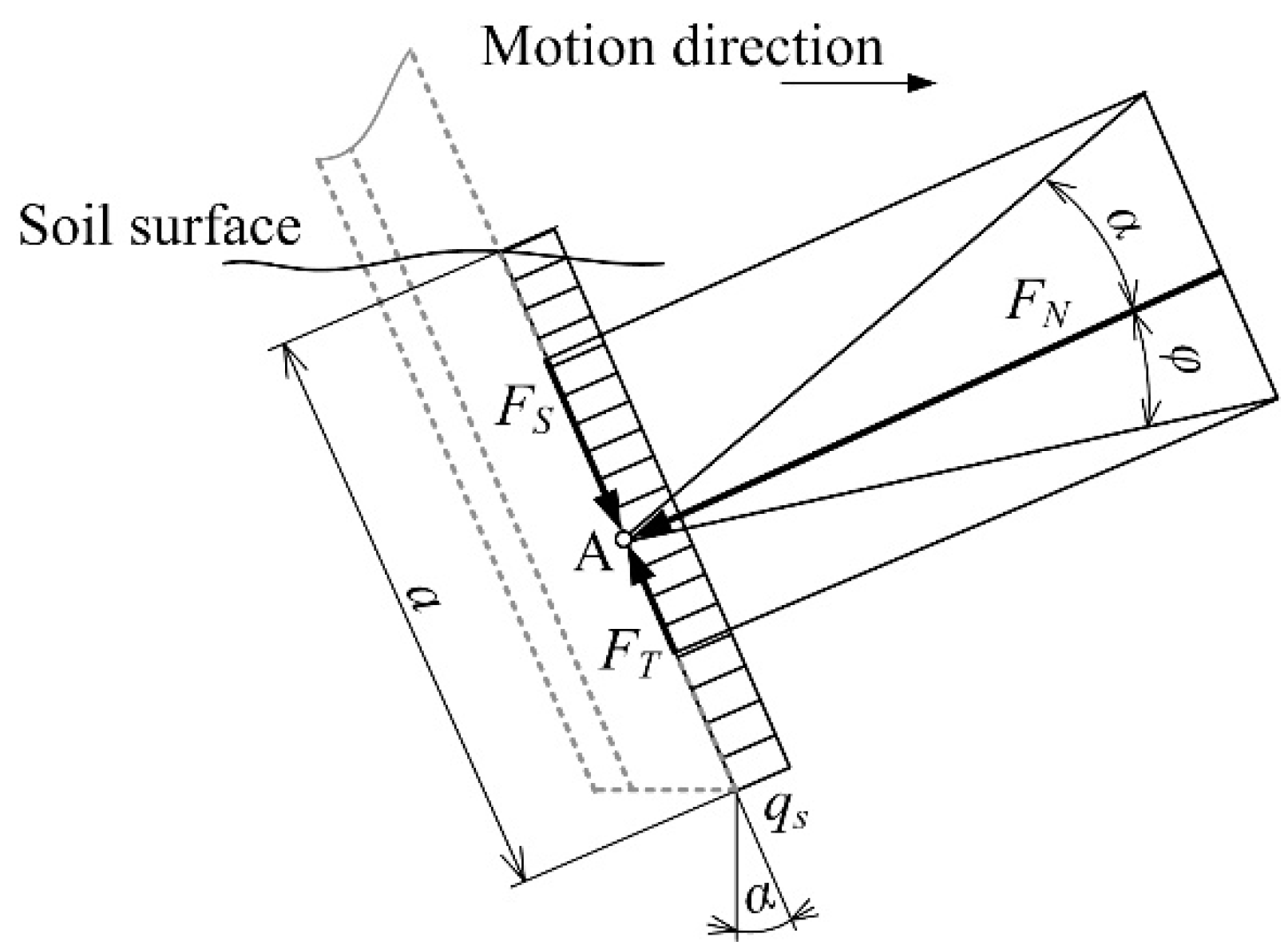
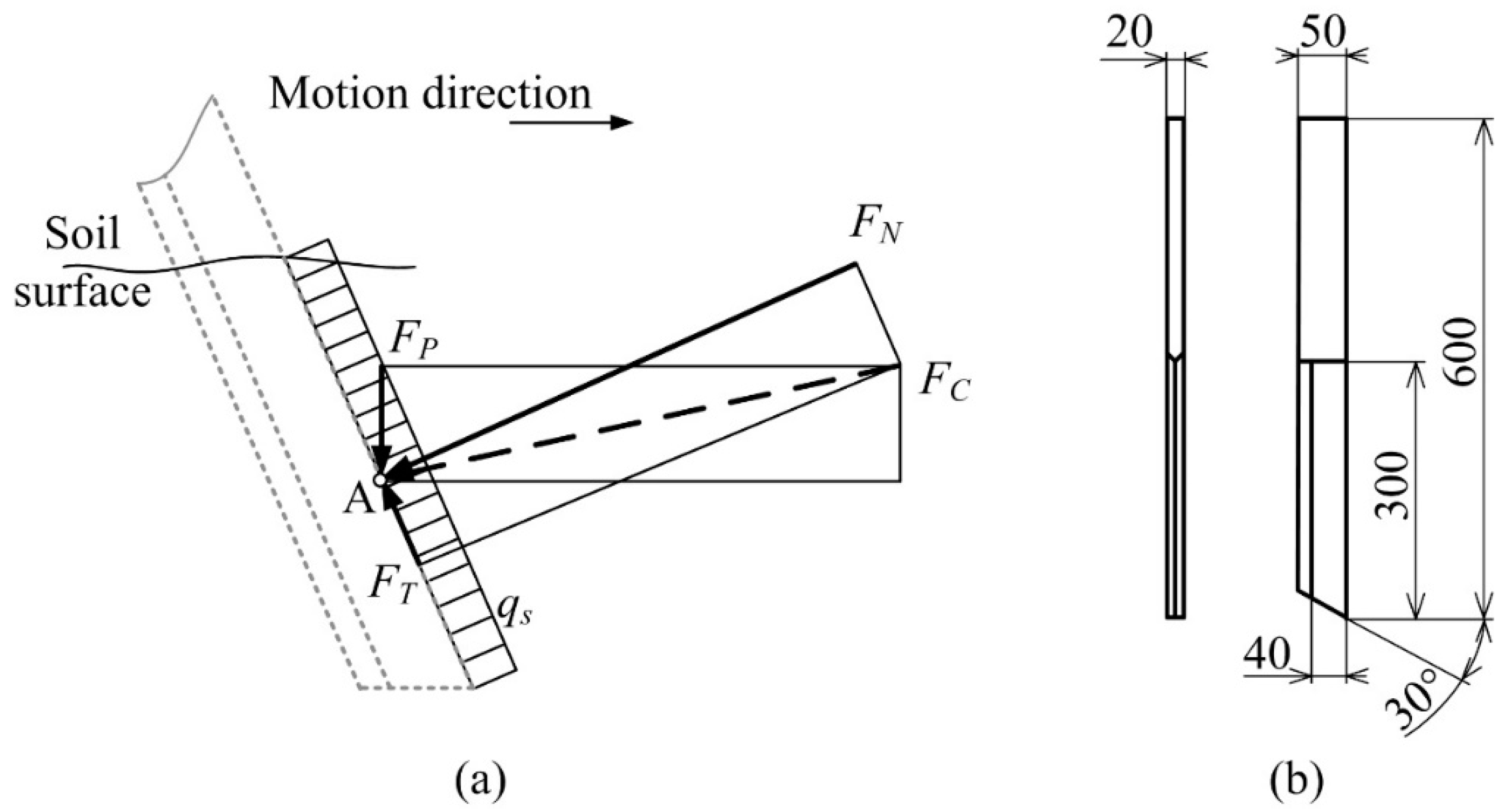
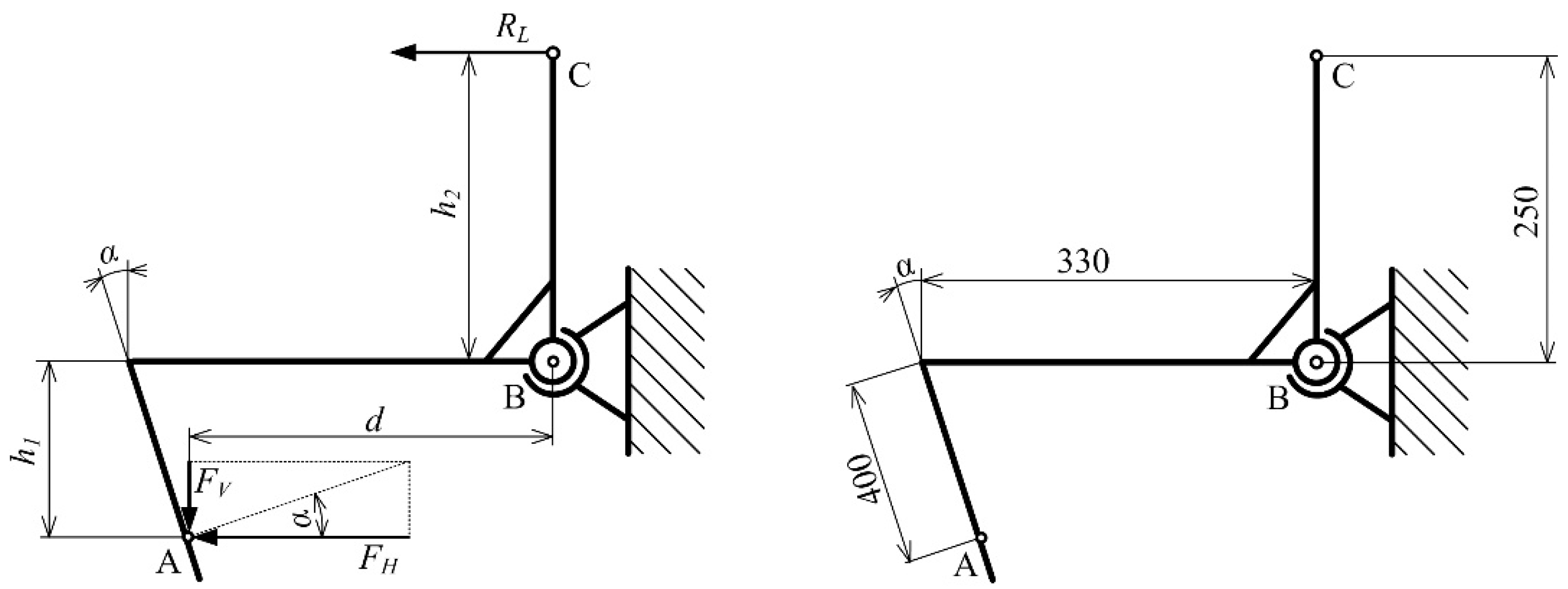
2.1. Design of Soil Resistance Force Sensor
- reach the working depth in all soil types (various physical properties) without the need for additional ballast weight;
- cut the roots of plants grown in the field.
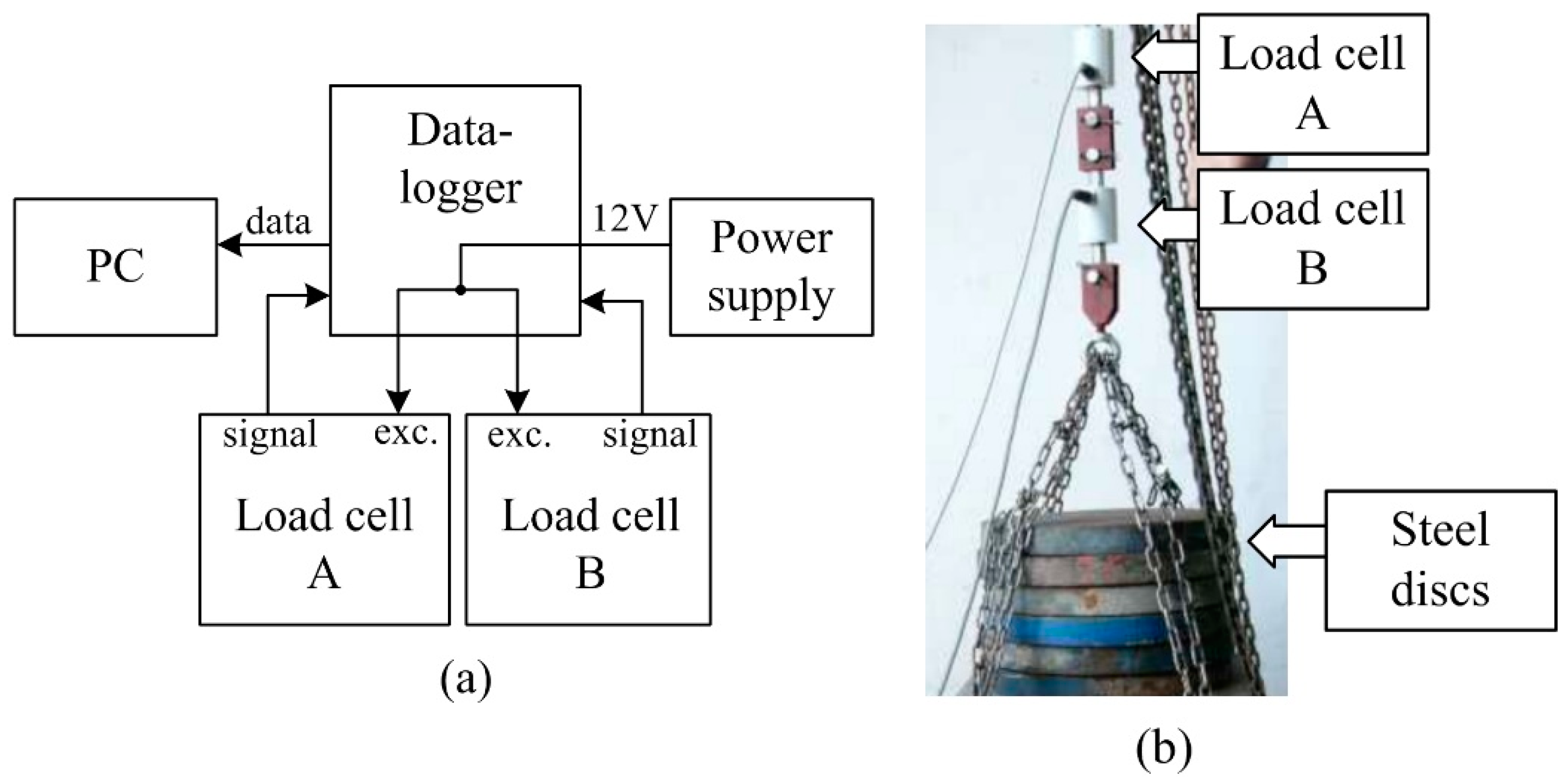
2.2. Proposal of Data Acquisition System
2.3. Experimental Test under Field Conditions
3. Results
3.1. Design of Data Acquisition System
- The AD converter is characterized by the voltage of 2.45 V at 25 °C, temperature coefficient of 15 ppm/°C, power supply rejection of 50 dB, resolution of 24 Bit, output word rate of 200 Hz, typical RMS noise of 76 µV, integral nonlinearity lower than ±15 ppm (FS) and gain error of ±0.002%.
- The microcontroller is characterized by the maximum rate lower than 50 MIPS, temperature range from −40 to +85 °C, program memory flash of 8 kB and maximum clock frequency of 50 MHz.
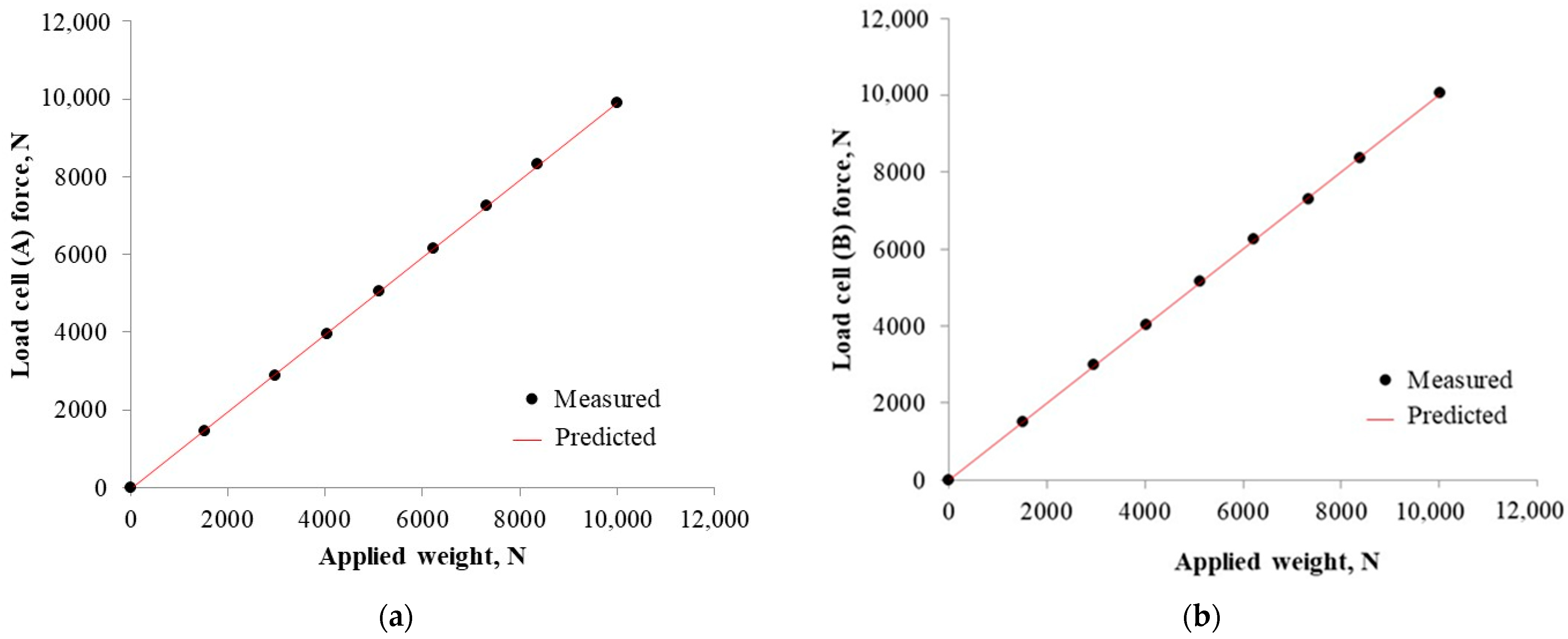
3.2. Calibration Test
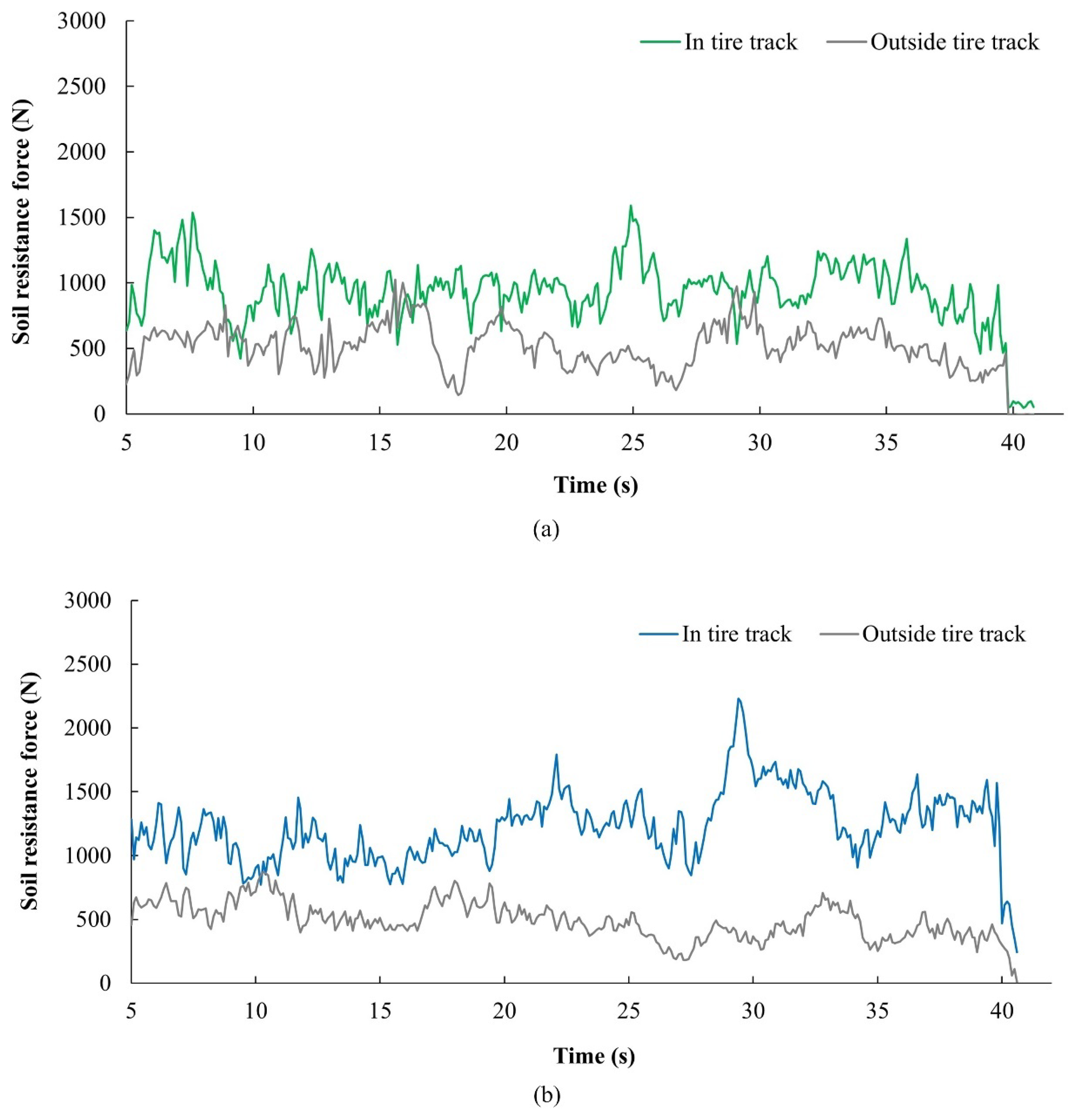
3.3. Practical Application under Field Conditions
4. Conclusions
- -
- The design of SRFS is based on two cutting blades which cut through the soil within the tire track and outside the tire track. The design allows the comparison of the uncompacted and compacted soil after passage of agricultural machinery (a tractor was used in our case) in real time. The design allows the setting of the balance of moments acting on the sensor lever mechanism, which simplifies the measured data evaluation.
- -
- The data acquisition system was proposed to convert the mechanical forces acting on the cutting blades into data that can be manipulated by the personal computer. The compact design and simple operation by only two switches and LED indication of the recording process were considered for agricultural operation. The specific software was developed to transfer the data recorded in the datalogger to the computer. The analysis of the recorded signal and the sampling frequency of 10 Hz was verified based on FFT (Fast Fourier transformation).
- -
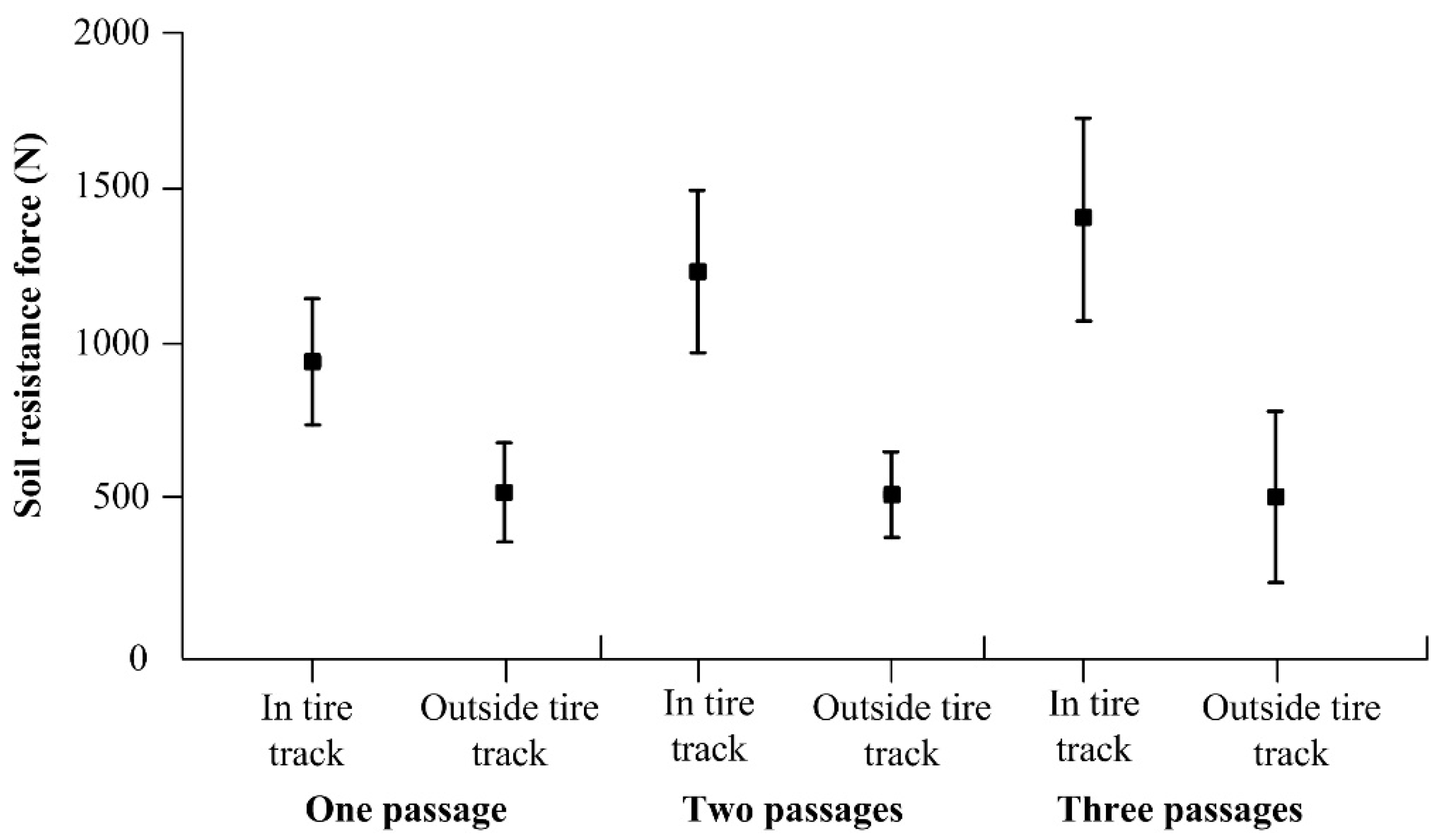
- The SRFS was tested under field conditions. Soil resistance forces were measured by SRFS with the proposed data acquisition system. The results showed the statistically significant difference between soil mechanical resistances measured outside the tire track and within the tire track after one, two and three tractor passages. The data measured by SRSF showed an increase in soil resistance force after tractor passages. The lowest values were measured outside the tire track and the highest after three tractor passages.
- -
- The data measured with the SRSF were compared with the standard measurements of penetrometer resistance and soil bulk density. The standard methods indicated an increase in soil compaction due to tractor passages at typical variability resulting from their principles. Their main disadvantages are a need for human work which may cause measurement errors and considerable time in the case of large areas.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Adamchuk, V.I.; Hummel, J.W.; Morgan, M.T.; Upadhyaya, S.K. On-the-go soil sensor for precision agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef] [Green Version]
- Corwin, D.L.; Lesch, S.M. Delineating site-specific management units with proximal sensors. In Geostatistical Applications for Precision Agriculture; Olier, M., Ed.; Springer: Dordrecht, The Netherlands, 2010; pp. 139–166. [Google Scholar]
- Sudduth, K.A.; Kitchen, N.R.; Wiebold, W.J.; Batchelor, W.D.; Bollero, G.A.; Bullock, D.G.; Clay, D.E.; Palm, H.L.; Pierce, F.J.; Schuler, R.T.; et al. Relating apparent electrical conductivity to soil properties across the North-Central USA. Comput. Electron. Agric. 2005, 46, 263–283. [Google Scholar] [CrossRef]
- Andrade-Sanchez, P.; Upadhyaya, S.K.; Jenkins, B.M. Development, construction, and field evaluation of a soil compaction profile sensor. Trans. ASABE 2008, 50, 719–725. [Google Scholar] [CrossRef]
- Cho, Y.; Sudduth, K.; Chung, S.O. Soil physical property estimation from soil strength and apparent electrical conductivity sensor data. Biosyst. Eng. 2016, 152, 68–78. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Lammers, P.S.; Daokun, M.; Jianhui, L.; Qingmeng, Z. Determining soil physical properties by multi-sensor technique. Actuator A Phys. 2008, 147, 352–357. [Google Scholar]
- Shaheb, M.R.; Venkatesh, R.; Shearer, S.A. A review on the effect of soil compaction and its management for sustainable crop production. J. Biosyst. Eng. 2021, 46, 417–439. [Google Scholar] [CrossRef]
- Varga, F.; Mojžiš, M.; Abrahám, R. Soil resistance and its impact on tillage depth. Acta Technol. Agric. 2013, 16, 24–28. [Google Scholar] [CrossRef]
- Procházka, P.; Novák, P.; Chyba, J.; Kumhála, F. Evaluation of measuring frame for soil tillage machines draught force measurement. Agron. Res. 2015, 13, 186–191. [Google Scholar]
- Sirjacobs, D.; Hanquet, B.; Lebeau, F.; Destain, M.F. On-line soil mechanical resistance mapping and correlation with soil physical properties for precision agriculture. Soil Tillage Res. 2002, 64, 231–242. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Cruse, R.M.; Sui, Y.Y.; Jhao, Z. Soil compaction induced by small tractor traffic in Northeast China. Soil Sci. Soc. Am. J. 2006, 70, 613–619. [Google Scholar] [CrossRef]
- Acquah, K.; Chen, Y. Soil compaction from wheel traffic under three tillage systems. Agriculture 2022, 12, 219. [Google Scholar] [CrossRef]
- Samuel, T.M.; Ajav, E.A. Optimum tillage system for pepper production in an alfisol of South-Western Nigeria. Afr. J. Agric. Res. 2010, 5, 2647–2652. [Google Scholar]
- Gao, W.; Ren, T.; Bengough, A.G.; Auneau, L.; Watts, C.W.; Whalley, W.R. Predicting penetrometer resistance from the compression characteristic of soil. Soil Sci. Soc. Am. J. 2012, 76, 361–369. [Google Scholar] [CrossRef]
- Fountas, S.; Paraforos, D.; Cavalaris, C.; Karamoutis, C.; Gemtos, T.A.; Abu-Khalaf, N.; Tagarakis, A. A five-point penetrometer with GPS for measuring soil compaction variability. Comput. Electron. Agric. 2013, 96, 109–116. [Google Scholar] [CrossRef]
- Boon, N.E.; Yahya, A.; Kheiralla, A.F.; Wee, B.S.; Gew, S.K. A tractor-mounted, automated soil penetrometer–shearometer unit for mapping soil mechanical properties. Biosyst. Eng. 2005, 90, 381–396. [Google Scholar] [CrossRef]
- Carrara, M.; Castrignanò, A.; Comparetti, A.; Febo, P.; Orlando, S. Mapping of penetrometer resistance in relation to tractor traffic using multivariate geostatistics. Geoderma 2007, 142, 294–307. [Google Scholar] [CrossRef] [Green Version]
- Adamchuk, V.I.; Christenson, P.T. Development of an instrumented blade system for mapping soil mechanical resistance represented as a second-order polynomial. Soil Tillage Res. 2007, 95, 76–83. [Google Scholar] [CrossRef]
- Machado, T.M.; Lancas, K. Prototype for soil mechanical resistance measurement with chisel plow automated control. Eng. Agricola 2016, 36, 646–655. [Google Scholar] [CrossRef] [Green Version]
- Agüera, V.J.; Carballido, J.; Gil, J.; Gliever, C.; Pérez-Ruiz, M. Design of a soil cutting resistance sensor for application in site-specific tillage. Sensors 2013, 13, 5945–5957. [Google Scholar] [CrossRef]
- Hemmat, A.; Rahnama, T.; Vahabi, Z. A horizontal multiple-tip penetrometer for on-the-go soil mechanical resistance and acoustic failure mode detection. Soil Tillage Res. 2014, 138, 17–25. [Google Scholar] [CrossRef]
- Adamchuk, V.I.; Ingram, T.J.; Sudduth, K.A.; Chung, S.O. On-the-go mapping of soil mechanical resistance using a linear depth effect model. Trans. ASABE 2008, 51, 1885–1894. [Google Scholar] [CrossRef]
- Sharifi, A.; Mohsenimanesh, A. Soil mechanical resistance measurement by an unique multi-cone tips horizontal sensor. Int. Agrophys. 2012, 26, 61–64. [Google Scholar] [CrossRef]
- Hemmat, A.; Khorsandi, A.; Shafaie, V. Soil failure mode in front of a multiple-tip horizontally operated penetrometer. Turk. J. Agric. For. 2012, 36, 476–485. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Rahimi-Ajdadi, F. Design, construction and field evaluation of a multiple blade soil mechanical resistance sensor. Soil Tillage Res. 2016, 157, 93–100. [Google Scholar] [CrossRef]
- Siefkin, R.J.; Adamchuk, V.I.; Eisenhauer, D.E.; Bashford, L.L. Mapping soil mechanical resistance with a multiple blade system. Appl. Eng. Agric. 2005, 21, 15–23. [Google Scholar] [CrossRef]
- Bulko, R.; Gago, F. Deformation Parameters of Soils Determined by the Cone Penetration Test. In Proceedings of the 26th R-S-P Seminar on Theoretical Foundation of Civil Engineering (RSP), Warsaw, Poland, 21–25 August 2017; MATEC Web of Conferences. Volume 117, pp. 1–8. [Google Scholar]
- Chukwu, C.G.; Bowers, J.R. Instantaneous multiple-depth soil mechanical impedance sensing from a moving vehicle. Appl. Eng. Agric. 2005, 48, 885–894. [Google Scholar] [CrossRef]
- Naderi-Boldaji, M.; Sharifi, A.; Jamshidi, B.; Younesi-Alamouti, M.; Minaee, S. A dielectric-based combined horizontal sensor for on-the-go measurement of soil water content and mechanical resistance. Sensor. Actuat. A 2011, 171, 131–137. [Google Scholar] [CrossRef]
- Sun, Y.; Ma, D.; Schulze Lammers, P.; Schmittmann, O.; Rose, M. On-the-go measurement of soil water content and mechanical resistance by a combined horizontal penetrometer. Soil Tillage Res. 2006, 86, 209–217. [Google Scholar] [CrossRef]
- Zeng, Q.; Suna, Y.; Schulze Lammers, P.; Maa, D.; Linc, J.; Hueging, H. Improvement of a dual-sensor horizontal penetrometer by incorporating an EC sensor. Comput. Electron. Agric. 2008, 64, 333–337. [Google Scholar] [CrossRef]
- Varga, F.; Tkáč, Z.; Šima, T.; Hujo, Ľ.; Kosiba, J.; Uhrinová, D. Measurement of soil resistance by using a horizontal penetrometer working with the two-argument comparative method. Agron. Res. 2014, 12, 187–196. [Google Scholar]
- Reece, A.R. The fundamental equation of earth-moving mechanics. In Proceedings of the Institution of Mechanical Engineers; Institution of Mechanical Engineers: London, UK, 1964; Volume 179, pp. 16–22. [Google Scholar]
- Marsot, J.; Claudon, L.; Jacqmin, M. Assessment of knife sharpness by means of a cutting force measuring system. Appl. Ergon. 2007, 38, 83–89. [Google Scholar] [PubMed]
- STN EN ISO 11461; Soil Quality—Determination of Soil Water Content as a Volume Fraction Using Coring Sleeves—Gravimetric Method. Slovak Office of Standards, Metrology and Testing: Bratislava, Slovak Republic, 2014.
- Páltik, J.; Nozdrovický, L.; Findura, P.; Maga, J. Quality of the seed placing in seeding of sugar beet. Res. Agr. Eng. 2005, 51, 33–38. [Google Scholar] [CrossRef] [Green Version]
- Lestariningsih, I.D.; Hairiah, K. Assessing soil compaction with two different methods of soil bulk density measurement in oil palm plantation soil. Procedia Environ. Sci. 2013, 17, 172–178. [Google Scholar] [CrossRef] [Green Version]
- Håkansson, I.; Lipiec, J. A review of the usefulness of relative bulk density values in studies of soil structure and compaction. Soil Tillage Res. 2000, 53, 71–85. [Google Scholar] [CrossRef]
- STN EN ISO 11272; Soil Quality—Determination of Dry Bulk Density. Slovak Office of Standards, Metrology and Testing: Bratislava, Slovak Republic, 2017.
- Bölenius, E.; Wetterlind, J.; Keller, T. Can within field yield variation be explained using horizontal penetrometer resistance and electrical conductivity measurements? Results from three Swedish fields. Acta Agric. Scand. 2018, 68, 690–700. [Google Scholar]
- Hemmat, A.; Khorsandy, A.; Masoumi, A.A.; Adamchuk, V.I. Influence of failure mode induced by a horizontally operated single-tip penetrometer on measured soil resistance. Soil Tillage Res. 2009, 105, 49–54. [Google Scholar] [CrossRef]
- Meselhy, A.A. Evaluation of locally made horizontal penetrometer to measure soil compaction under Egyptian conditions. Biosci. Res. 2020, 17, 2331–2357. [Google Scholar]
- Galambošová, J.; Macák, M.; Rataj, V.; Barát, M.; Misiewicz, P. Determining trafficked areas using soil electrical conductivity—A pilot study. Acta Technol. Agric. 2020, 23, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Macák, M.; Rataj, V.; Barát, M.; Galambošová, J. Comparison of two sowing systems for CTF using commercially available machinery. Agron. Res. 2018, 16, 523–533. [Google Scholar]
- Hamza, M.A.; Anderson, W.K. Soil compaction in cropping systems A review of the nature, causes and possible solutions. Soil Tillage Res. 2005, 82, 121–145. [Google Scholar] [CrossRef]
- Abu-Hamdeh, N.H. Compaction and subsoiling effects on corn growth and soil bulk density. Soil Sci. Soc. Am. J. 2003, 67, 1213–1219. [Google Scholar] [CrossRef]
- Dumitru, G.; Hůla, J.; Kroulík, M. Evaluation of soil physical properties in system with permanent traffic lanes practised in 10 ha field. Acta Technol. Agric. 2015, 18, 92–96. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Place of Measurement | Tractor Passage | Depth (cm) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| outside tire track | 0 | 0.28/ 0.07 | 0.31/ 0.02 | 0.55/ 0.31 | 0.90/ 0.47 | 1.38/ 0.19 | 1.72/ 0.05 | 1.90/ 0.29 | 2.06/ 0.06 | 2.37/ 0.21 | 2.77/ 0.11 |
| within tire track | 1 | 0.78/ 0.16 | 1.17/ 0.54 | 1.53/ 0.63 | 2.08/ 0.64 | 2.20/ 0.78 | 2.35/ 0.83 | 2.42/ 0.75 | 2.41/ 0.81 | 2.35/ 0.76 | 2.36/ 0.76 |
| 2 | 0.83/ 0.31 | 1.00/ 0.55 | 1.69/ 0.34 | 2.18/ 0.15 | 2.39/ 0.23 | 2.41/ 0.24 | 2.48/ 0.38 | 2.59/ 0.43 | 2.63/ 0.62 | 2.74/ 0.66 | |
| 3 | 0.86/ 0.21 | 1.01/ 0.37 | 1.32/ 0.54 | 1.62/ 0.67 | 2.06/ 1.11 | 2.48/ 0.37 | 2.68/ 0.12 | 2.77/ 0.14 | 2.83/ 0.02 | 2.75/ 0.31 | |
| Place of Measurement | Tractor Passage | Measurement Repetition | Mean | Standard Deviation | ||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| outside tire track | 0 | 0.89 | 1.01 | 1.1 | 1.01 | 0.11 |
| within tire track | 1 | 1.13 | 1.09 | 1.12 | 1.08 | 0.02 |
| 2 | 1.14 | 1.09 | 1.14 | 1.13 | 0.03 | |
| 3 | 1.33 | 1.23 | 1.21 | 1.25 | 0.06 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cviklovič, V.; Mojžiš, M.; Majdan, R.; Kollárová, K.; Tkáč, Z.; Abrahám, R.; Masarovičová, S. Data Acquisition System for On-the-Go Soil Resistance Force Sensor Using Soil Cutting Blades. Sensors 2022, 22, 5301. https://doi.org/10.3390/s22145301
Cviklovič V, Mojžiš M, Majdan R, Kollárová K, Tkáč Z, Abrahám R, Masarovičová S. Data Acquisition System for On-the-Go Soil Resistance Force Sensor Using Soil Cutting Blades. Sensors. 2022; 22(14):5301. https://doi.org/10.3390/s22145301
Chicago/Turabian StyleCviklovič, Vladimír, Miroslav Mojžiš, Radoslav Majdan, Katarína Kollárová, Zdenko Tkáč, Rudolf Abrahám, and Soňa Masarovičová. 2022. "Data Acquisition System for On-the-Go Soil Resistance Force Sensor Using Soil Cutting Blades" Sensors 22, no. 14: 5301. https://doi.org/10.3390/s22145301
APA StyleCviklovič, V., Mojžiš, M., Majdan, R., Kollárová, K., Tkáč, Z., Abrahám, R., & Masarovičová, S. (2022). Data Acquisition System for On-the-Go Soil Resistance Force Sensor Using Soil Cutting Blades. Sensors, 22(14), 5301. https://doi.org/10.3390/s22145301