
Keypoint Detection for Injury Identification during Turkey Husbandry Using Neural Networks

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
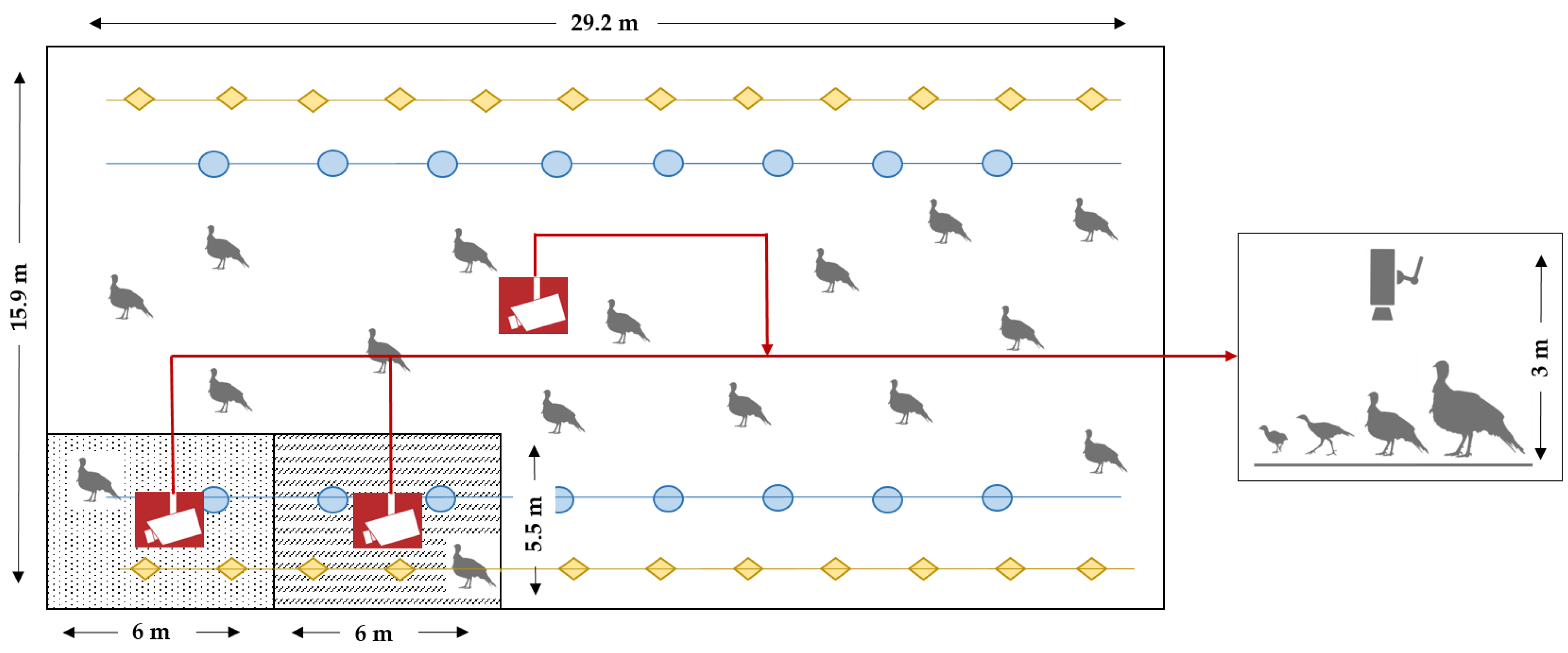
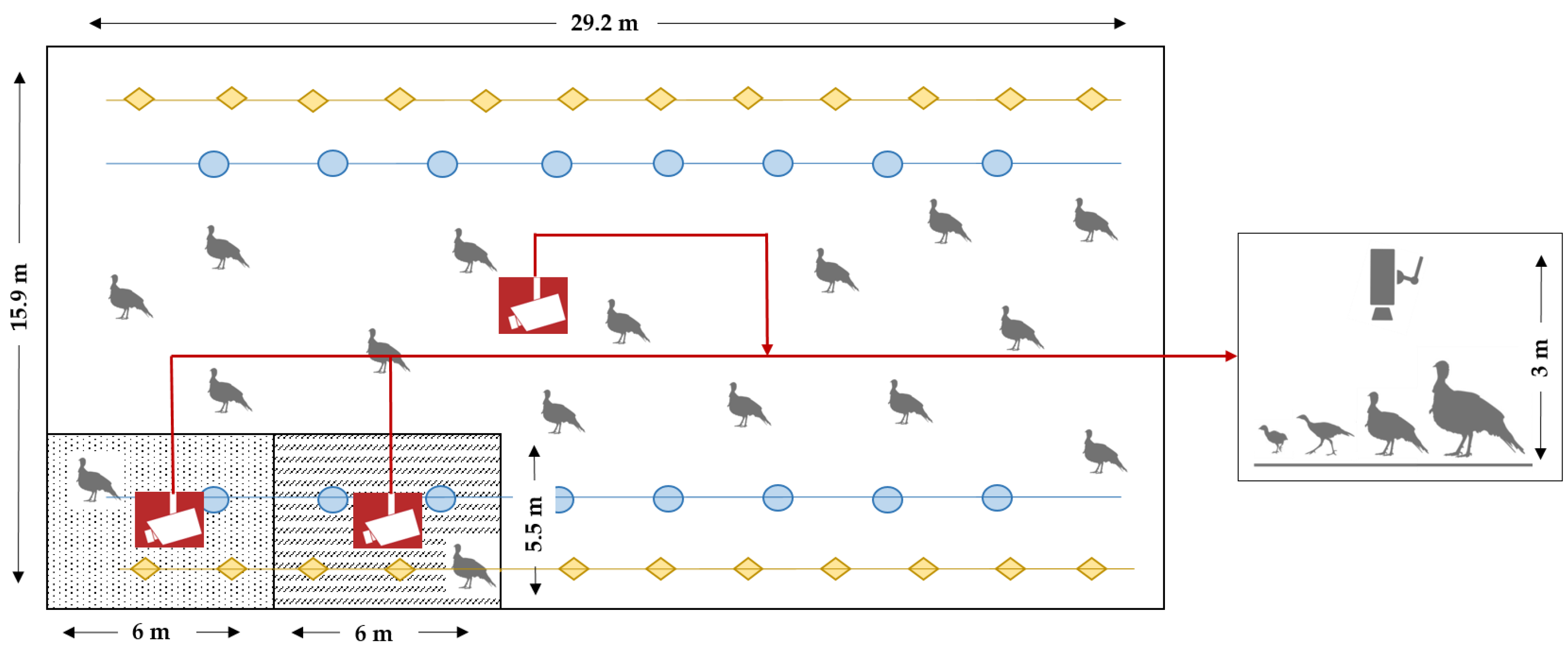
3.1. Preliminary Research
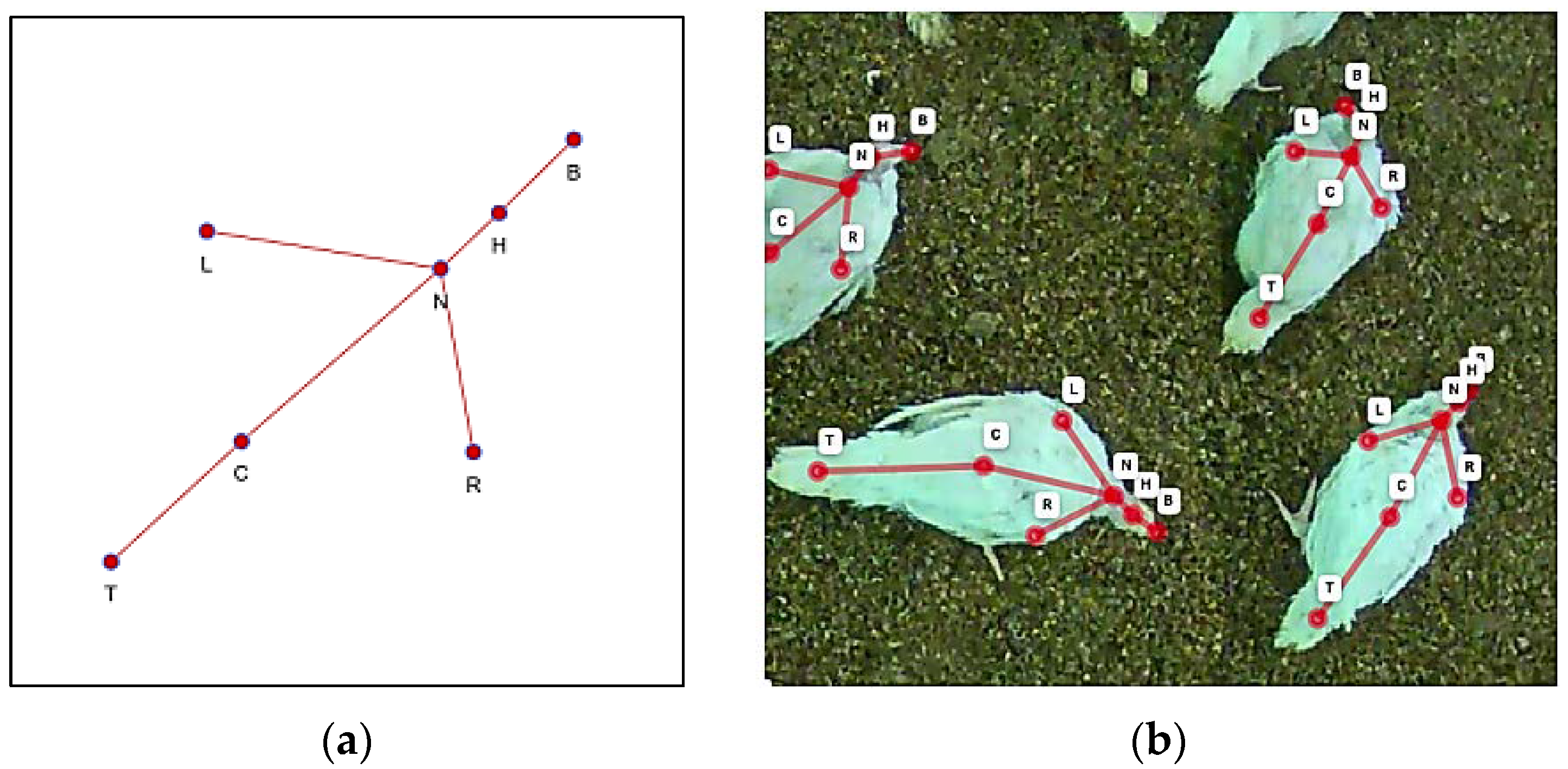
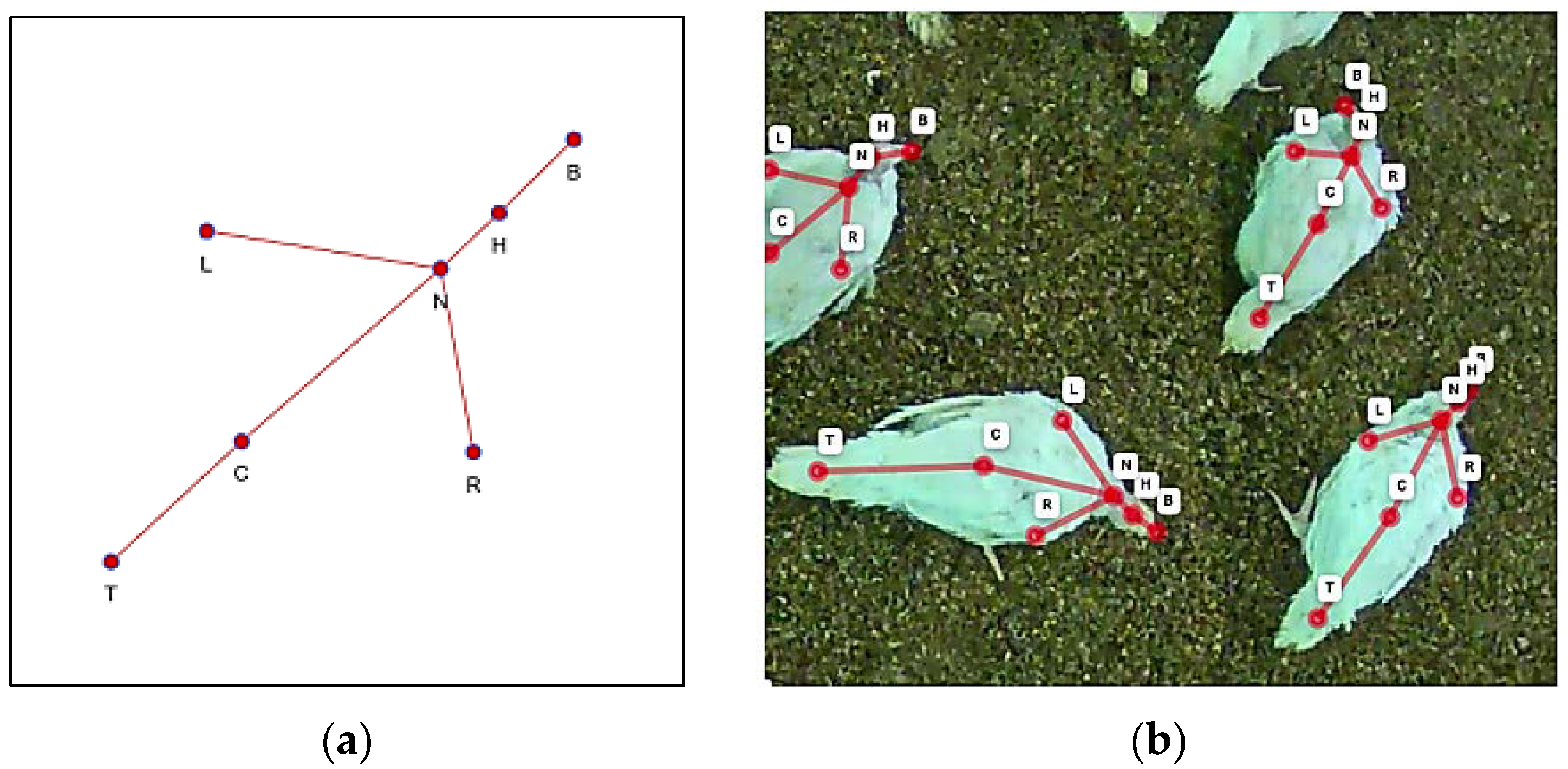
3.2. Manual Keypoint Annotation
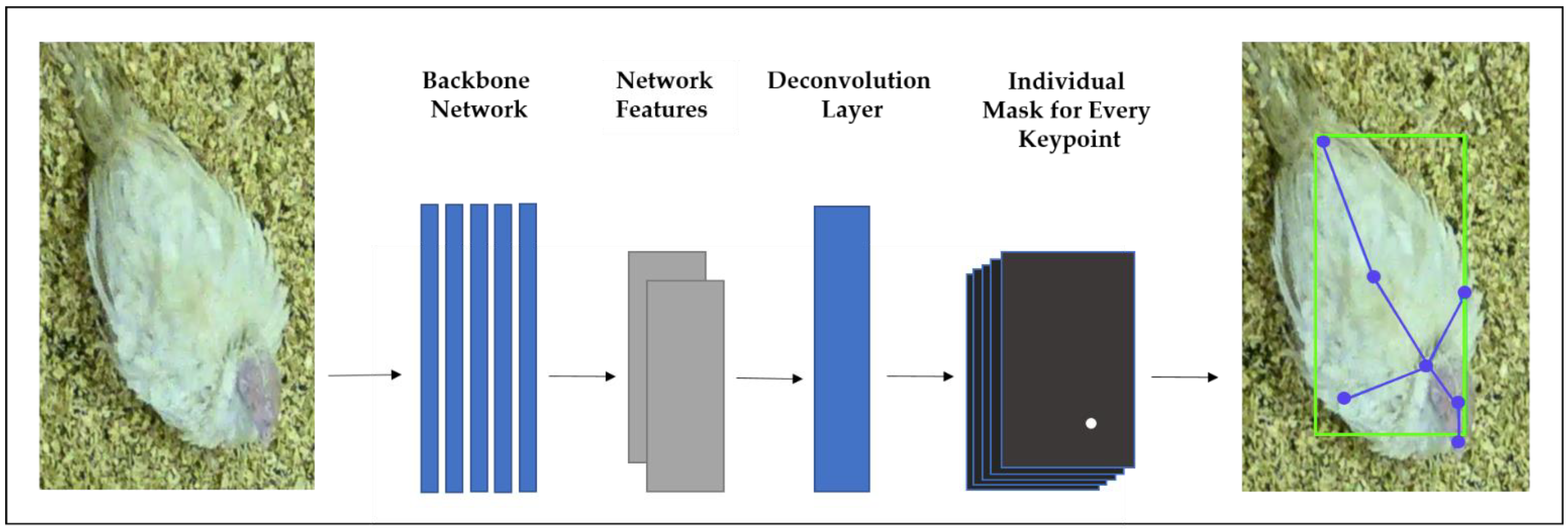
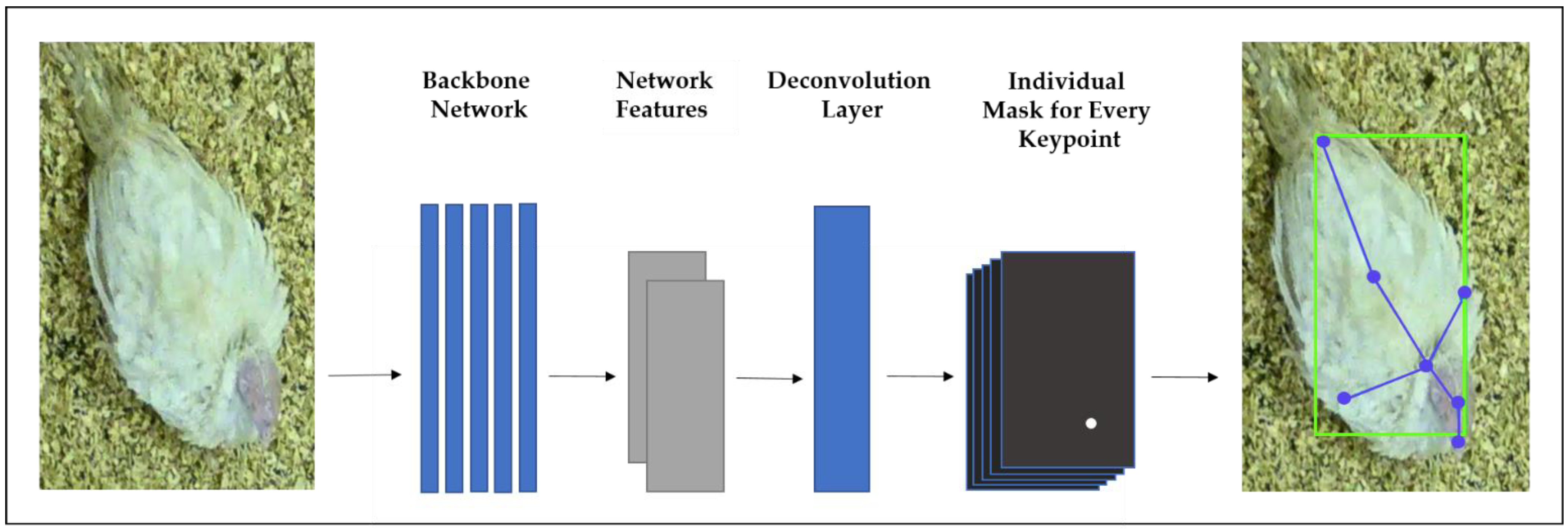
3.3. Keypoint Detection Models
- (i)
- Connect high- and low-resolution convolutions in parallel rather than in series;
- (ii)
- Maintain high resolution through the entire process instead of recovering high resolution from low resolution; and
- (iii)
- Fuse multi-resolution representations repeatedly, thus rendering rich high-resolution representations with strong position sensitivity.
3.4. Segmentation Model
3.5. Combination of Models
4. Results
4.1. Quantitative Results
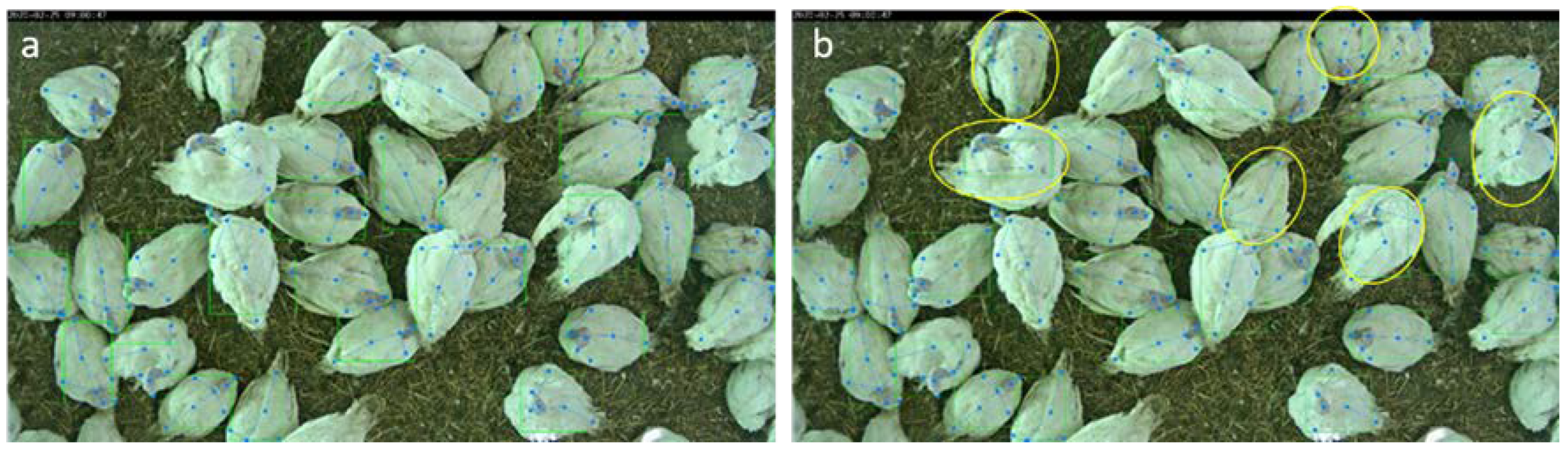
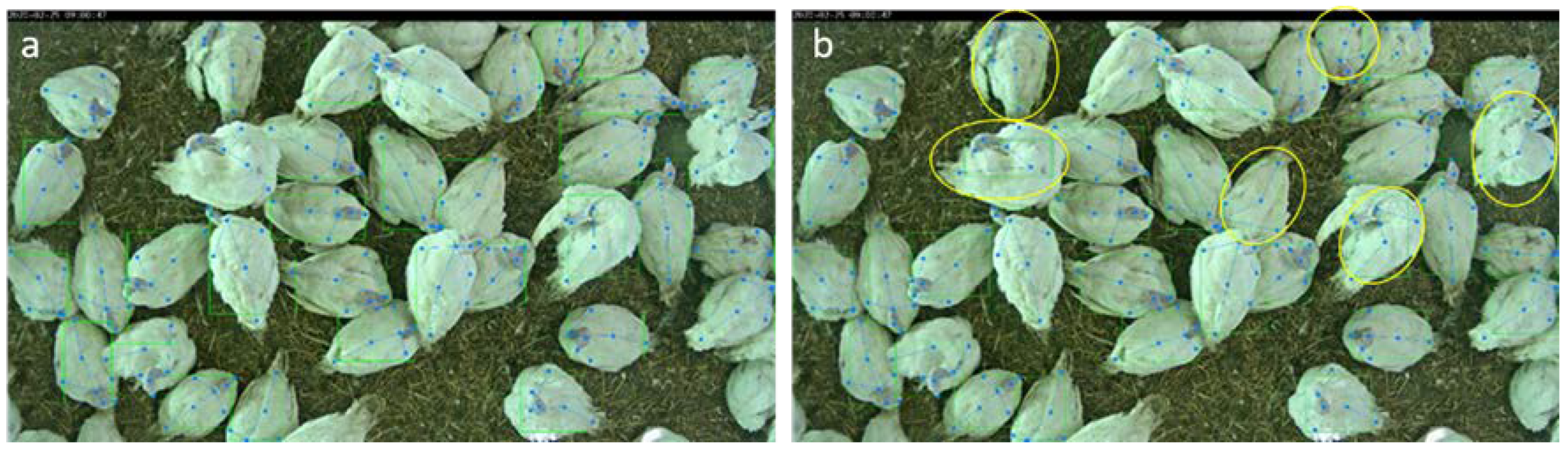
4.2. Qualitative Results
5. Discussion and Further Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhuang, X.; Bi, M.; Guo, J.; Wu, S.; Zhang, T. Development of an early warning algorithm to detect sick broilers. Comput. Electron. Agric. 2018, 144, 102–113. [Google Scholar] [CrossRef]
- Youssef, A.; Exadaktylos, V.; Berckmans, D.A. Towards real-time control of chicken activity in a ventilated chamber. Biosyst. Eng. 2015, 135, 31–43. [Google Scholar] [CrossRef]
- Aydin, A. Development of an early detection system for lameness of broilers using computer vision. Comput. Electron. Agric. 2017, 136, 140–146. [Google Scholar] [CrossRef]
- Aydin, A.; Berckmans, D. Using sound technology to automatically detect the short-term feeding behaviours of broiler chickens. Comput. Electron. Agric. 2016, 121, 25–31. [Google Scholar] [CrossRef]
- Li, G.; Zhao, Y.; Purswell, J.L.; Du, Q.; Chesser, G.D.; Lowe, J.W. Analysis of feeding and drinking behaviors of group-reared broilers via image processing. Comput. Electron. Agric. 2020, 175, 105596. [Google Scholar] [CrossRef]
- Li, G.; Li, B.; Shi, Z.; Zhao, Y.; Ma, H. Design and evaluation of a lighting preference test system for laying hens. Comput. Electron. Agric. 2018, 147, 118–125. [Google Scholar] [CrossRef]
- Stadig, L.M.; Rodenburg, T.B.; Ampe, B.; Reubens, B.; Tuyttens, F.A.M. An automated positioning system for monitoring chickens’ location: Effects of wearing a backpack on behaviour, leg health and production. Appl. Anim. Behav. Sci. 2018, 198, 83–88. [Google Scholar] [CrossRef]
- Li, G.; Hui, X.; Chen, Z.; Chesser, G.; Zhao, Y. Development and evaluation of a method to detect broilers continuously walking around feeder as an indication of restricted feeding behaviors. Comput. Electron. Agric. 2021, 181, 105982. [Google Scholar] [CrossRef]
- Leroy, T.; Vranken, E.; Van Brecht, A.; Struelens, E.; Sonck, B.; Berckmans, D. A computer vision method for on-line behavioral quantification of individually caged poultry. Trans. ASABE 2006, 49, 795–802. [Google Scholar] [CrossRef]
- Fang, C.; Zhang, T.; Zheng, H.; Huang, J.; Cuan, K. Pose estimation and behavior classification of broiler chickens based on deep neural networks. Comput. Electron. Agric. 2021, 180, 105863. [Google Scholar] [CrossRef]
- Psota, E.T.; Schmidt, T.; Mote, B.; Pérez, L.C. Long-term tracking of group-housed livestock using keypoint detection and map estimation for individual animal identification. Sensors 2020, 20, 3670. [Google Scholar] [CrossRef] [PubMed]
- Brunger, J.; Gentz, M.; Traulsen, I.; Koch, R. Panoptic segmentation of individual pigs for posture recognition. Sensors 2020, 20, 3710. [Google Scholar] [CrossRef] [PubMed]
- Dalton, H.A.; Wood, B.J.; Torrey, S. Injurious pecking in domestic turkeys: Development, causes, and potential solutions. World’s Poult. Sci. J. 2013, 69, 865–876. [Google Scholar] [CrossRef]
- Huber-Eicher, B.; Wechsler, B. Feather pecking in domestic chicks: Its relation to dustbathing and foraging. Anim. Behav. 1997, 54, 757–768. [Google Scholar] [CrossRef] [Green Version]
- Krautwald-Junghanns, M.-E.; Ellerich, R.; Mitterer-Istyagin, H.; Ludewig, M.; Fehlhaber, K.; Schuster, E.; Berk, J.; Dressel, A.; Petermann, S.; Kruse, W.; et al. Examination of the prevalence of skin injuries in debeaked fattened turkeys. Berl. Munch. Tierarztl. Wochenschr. 2011, 124, 8–16. [Google Scholar]
- Volkmann, N.; Brunger, J.; Stracke, J.; Zelenka, C.; Koch, R.; Kemper, N.; Spindler, B. Learn to train: Improving training data for a neural network to detect pecking injuries in turkeys. Animals 2021, 11, 2655. [Google Scholar] [CrossRef]
- Sibanda, T.Z.; Welch, M.; Schneider, D.; Kolakshyapati, M.; Ruhnke, I. Characterising free-range layer flocks using unsupervised cluster analysis. Animals 2020, 10, 855. [Google Scholar] [CrossRef]
- Yang, X.; Zhao, Y.; Street, G.M.; Huang, Y.; Filip To, S.D.; Purswell, J.L. Classification of broiler behaviours using triaxial accelerometer and machine learning. Animal 2021, 15, 100269. [Google Scholar] [CrossRef]
- Gebhardt-Henrich, S.G.; Stratmann, A.; Dawkins, M.S. Groups and individuals: Optical flow patterns of broiler chicken flocks are correlated with the behavior of individual birds. Animals 2021, 11, 568. [Google Scholar] [CrossRef]
- Mollah, M.B.R.; Hasan, M.A.; Salam, M.A.; Ali, M.A. Digital image analysis to estimate the live weight of broiler. Comput. Electron. Agric. 2010, 72, 48–52. [Google Scholar] [CrossRef]
- Mortensen, A.K.; Lisouski, P.; Ahrendt, P. Weight prediction of broiler chickens using 3D computer vision. Comput. Electron. Agric. 2016, 123, 319–326. [Google Scholar] [CrossRef]
- Okinda, C.; Lu, M.; Liu, L.; Nyalala, I.; Muneri, C.; Wang, J.; Zhang, H.; Shen, M. A machine vision system for early detection and prediction of sick birds: A broiler chicken model. Biosyst. Eng. 2019, 188, 229–242. [Google Scholar] [CrossRef]
- Zhuang, X.; Zhang, T. Detection of sick broilers by digital image processing and deep learning. Biosyst. Eng. 2019, 179, 106–116. [Google Scholar] [CrossRef]
- Pereira, D.F.; Miyamoto, B.C.B.; Maia, G.D.N.; Tatiana Sales, G.; Magalhães, M.M.; Gates, R.S. Machine vision to identify broiler breeder behavior. Comput. Electron. Agric. 2013, 99, 194–199. [Google Scholar] [CrossRef]
- Neves, D.P.; Mehdizadeh, S.A.; Tscharke, M.; Nääs, I.d.A.; Banhazi, T.M. Detection of flock movement and behaviour of broiler chickens at different feeders using image analysis. Inf. Process. Agric. 2015, 2, 177–182. [Google Scholar] [CrossRef] [Green Version]
- Van Hertem, T.; Norton, T.; Berckmans, D.; Vranken, E. Predicting broiler gait scores from activity monitoring and flock data. Biosyst. Eng. 2018, 173, 93–102. [Google Scholar] [CrossRef]
- Ye, C.W.; Yousaf, K.; Qi, C.; Liu, C.; Chen, K.J. Broiler stunned state detection based on an improved fast region-based convolutional neural network algorithm. Poult Sci 2020, 99, 637–646. [Google Scholar] [CrossRef]
- Chmiel, M.; Słowiński, M.; Dasiewicz, K. Application of computer vision systems for estimation of fat content in poultry meat. Food Control. 2011, 22, 1424–1427. [Google Scholar] [CrossRef]
- Geronimo, B.C.; Mastelini, S.M.; Carvalho, R.H.; Barbon Júnior, S.; Barbin, D.F.; Shimokomaki, M.; Ida, E.I. Computer vision system and near-infrared spectroscopy for identification and classification of chicken with wooden breast, and physicochemical and technological characterization. Infrared Phys. Technol. 2019, 96, 303–310. [Google Scholar] [CrossRef]
- Alon, A.S. An image processing approach of multiple eggs’ quality inspection. Int. J. Adv. Trends Comput. Sci. Eng. 2019, 8, 2794–2799. [Google Scholar] [CrossRef]
- Narin, B.; Buntan, S.; Chumuang, N.; Ketcham, M. Crack on Eggshell Detection System Based on Image Processing Technique. In Proceedings of the 18th International Symposium on Communications and Information Technologies, Bangkok, Thailand, 26–29 September 2018; pp. 1–6. [Google Scholar]
- Neethirajan, S. Automated tracking systems for the assessment of farmed poultry. Animals 2022, 12, 232. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Reibman, A.R.; Boerman, J.P. Video analytic system for detecting cow structure. Comput. Electron. Agric. 2020, 178, 105761. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, Z.; Tao, D. Towards high performance human keypoint detection. Int. J. Comput. Vis. 2021, 129, 2639–2662. [Google Scholar] [CrossRef]
- Hong, F.; Lu, C.; Liu, C.; Liu, R.; Jiang, W.; Ju, W.; Wang, T. PGNet: Pipeline guidance for human key-point detection. Entropy 2020, 22, 369. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pereira, T.D.; Aldarondo, D.E.; Willmore, L.; Kislin, M.; Wang, S.S.H.; Murthy, M.; Shaevitz, J.W. Fast animal pose estimation using deep neural networks. Nat. Methods 2019, 16, 117–125. [Google Scholar] [CrossRef]
- Graving, J.M.; Chae, D.; Naik, H.; Li, L.; Koger, B.; Costelloe, B.R.; Couzin, I.D. DeepPoseKit, a software toolkit for fast and robust animal pose estimation using deep learning. Elife 2019, 8, e47994. [Google Scholar] [CrossRef]
- Günel, S.; Rhodin, H.; Morales, D.; Campagnolo, J.; Ramdya, P.; Fua, P. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. ELife 2019, 8, e48571. [Google Scholar] [CrossRef]
- Hebert, L.; Ahamed, T.; Costa, A.C.; O’Shaughnessy, L.; Stephens, G.J. WormPose: Image synthesis and convolutional networks for pose estimation in C. elegans. PLoS Comput. Biol. 2021, 17, e1008914. [Google Scholar] [CrossRef]
- Li, X.; Cai, C.; Zhang, R.; Ju, L.; He, J. Deep cascaded convolutional models for cattle pose estimation. Comput. Electron. Agric. 2019, 164, 104885. [Google Scholar] [CrossRef]
- Russello, H.; van der Tol, R.; Kootstra, G. T-LEAP: Occlusion-robust pose estimation of walking cows using temporal information. Comput. Electron. Agric. 2022, 192, 106559. [Google Scholar] [CrossRef]
- Quddus Khan, A.; Khan, S.; Ullah, M.; Cheikh, F.A. A Bottom-up approach for pig skeleton extraction using RGB data. In Proceedings of the International Conference on Image and Signal Processing, Marrakesh, Morocco, 4–6 June 2020; Lecture Notes in Computer Science. Springer: Cham, Switzerland, 2020; pp. 54–61. [Google Scholar]
- Doornweerd, J.E.; Kootstra, G.; Veerkamp, R.F.; Ellen, E.D.; van der Eijk, J.A.J.; van de Straat, T.; Bouwman, A.C. Across-species pose estimation in poultry based on images using deep learning. Front. Anim. Sci. 2021, 2, 791290. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.J.; Bourdev, L.D.; Girshick, R.B.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Xiao, B.; Wu, H.; Wei, Y. Simple baselines for human pose estimation and tracking. In Proceedings of the European conference on computer vision, Munich, Germany, 8–14 September 2018; pp. 472–487. [Google Scholar]
- Sun, K.; Xiao, B.; Liu, D.; Wang, J. Deep high-resolution representation learning for human pose estimation. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 5686–5696. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.-J.; Kai, L.; Li, F.-F. ImageNet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Wang, J.; Sun, K.; Cheng, T.; Jiang, B.; Deng, C.; Zhao, Y.; Liu, D.; Mu, Y.; Tan, M.; Wang, X.; et al. Deep high-resolution representation learning for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 3349–3364. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking model scaling for convolutional neural networks. In Proceedings of the 36 th International Conference on Machine Learning, Long Beach, CA, USA, 10–15 June 2019. [Google Scholar]
- Abd Aziz, N.S.N.; Mohd Daud, S.; Dziyauddin, R.A.; Adam, M.Z.; Azizan, A. A review on computer vision technology for monitoring poultry Farm—Application, hardware, and software. IEEE Access 2021, 9, 12431–12445. [Google Scholar] [CrossRef]
- Kashiha, M.A.; Bahr, C.; Vranken, E.; Hong, S.-W.; Berckmans, D. Monitoring system to detect problems in broiler houses based on image processing. In Proceedings of the International Conference of Agricultural Engineering, Zurich, Switzerland, 6–10 July 2014. [Google Scholar]
- Kulke, K.; Habig, C.; Beyerbach, M.; Kemper, N.; Spindler, B. Studies regarding the occurrence of feather pecking and cannibalism in flocks of non-beaktrimmed male turkeys (B.U.T. 6) kept under different stocking densities in an enriched curtain-sided barn. Eur. Poult. Sci. 2022, 86. [Google Scholar] [CrossRef]
- Cao, J.; Tang, H.; Fang, H.; Shen, X.; Lu, C.; Tai, Y.-W. Cross-domain adaptation for animal pose estimation. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Marchewka, J.; Estevez, I.; Vezzoli, G.; Ferrante, V.; Makagon, M.M. The transect method: A novel approach to on-farm welfare assessment of commercial turkeys. Poult. Sci. 2015, 94, 7–16. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyper-Parameters | AP0.50 | AP0.75 | AP | AR0.50 | AR0.75 | AR |
|---|---|---|---|---|---|---|
| LR 1 = 1e–4; epochs = 180 | 0.677 | 0.129 | 0.249 | 0.721 | 0.234 | 0.315 |
| LR 1 = 3e–4; epochs = 150 | 0.714 | 0.137 | 0.273 | 0.755 | 0.243 | 0.334 |
| LR 1 = 5e–4; epochs = 100 | 0.735 | 0.246 | 0.322 | 0.762 | 0.355 | 0.383 |
| Architecture Type | AP0.50 | AP0.75 | AP | AR0.50 | AR0.75 | AR |
|---|---|---|---|---|---|---|
| Baseline–ResNet50 | 0.648 | 0.107 | 0.213 | 0.691 | 0.198 | 0.292 |
| Baseline–ResNet101 | 0.640 | 0.107 | 0.228 | 0.687 | 0.200 | 0.288 |
| Baseline–ResNet152 | 0.659 | 0.134 | 0.254 | 0.703 | 0.231 | 0.313 |
| HRNet-W32 | 0.692 | 0.158 | 0.267 | 0.726 | 0.241 | 0.323 |
| HRNet-W48 | 0.735 | 0.246 | 0.322 | 0.762 | 0.355 | 0.383 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Volkmann, N.; Zelenka, C.; Devaraju, A.M.; Brünger, J.; Stracke, J.; Spindler, B.; Kemper, N.; Koch, R. Keypoint Detection for Injury Identification during Turkey Husbandry Using Neural Networks. Sensors 2022, 22, 5188. https://doi.org/10.3390/s22145188
Volkmann N, Zelenka C, Devaraju AM, Brünger J, Stracke J, Spindler B, Kemper N, Koch R. Keypoint Detection for Injury Identification during Turkey Husbandry Using Neural Networks. Sensors. 2022; 22(14):5188. https://doi.org/10.3390/s22145188
Chicago/Turabian StyleVolkmann, Nina, Claudius Zelenka, Archana Malavalli Devaraju, Johannes Brünger, Jenny Stracke, Birgit Spindler, Nicole Kemper, and Reinhard Koch. 2022. "Keypoint Detection for Injury Identification during Turkey Husbandry Using Neural Networks" Sensors 22, no. 14: 5188. https://doi.org/10.3390/s22145188
APA StyleVolkmann, N., Zelenka, C., Devaraju, A. M., Brünger, J., Stracke, J., Spindler, B., Kemper, N., & Koch, R. (2022). Keypoint Detection for Injury Identification during Turkey Husbandry Using Neural Networks. Sensors, 22(14), 5188. https://doi.org/10.3390/s22145188