
Human Pulse Detection by a Soft Tactile Actuator


Abstract
:1. Introduction
2. System Description
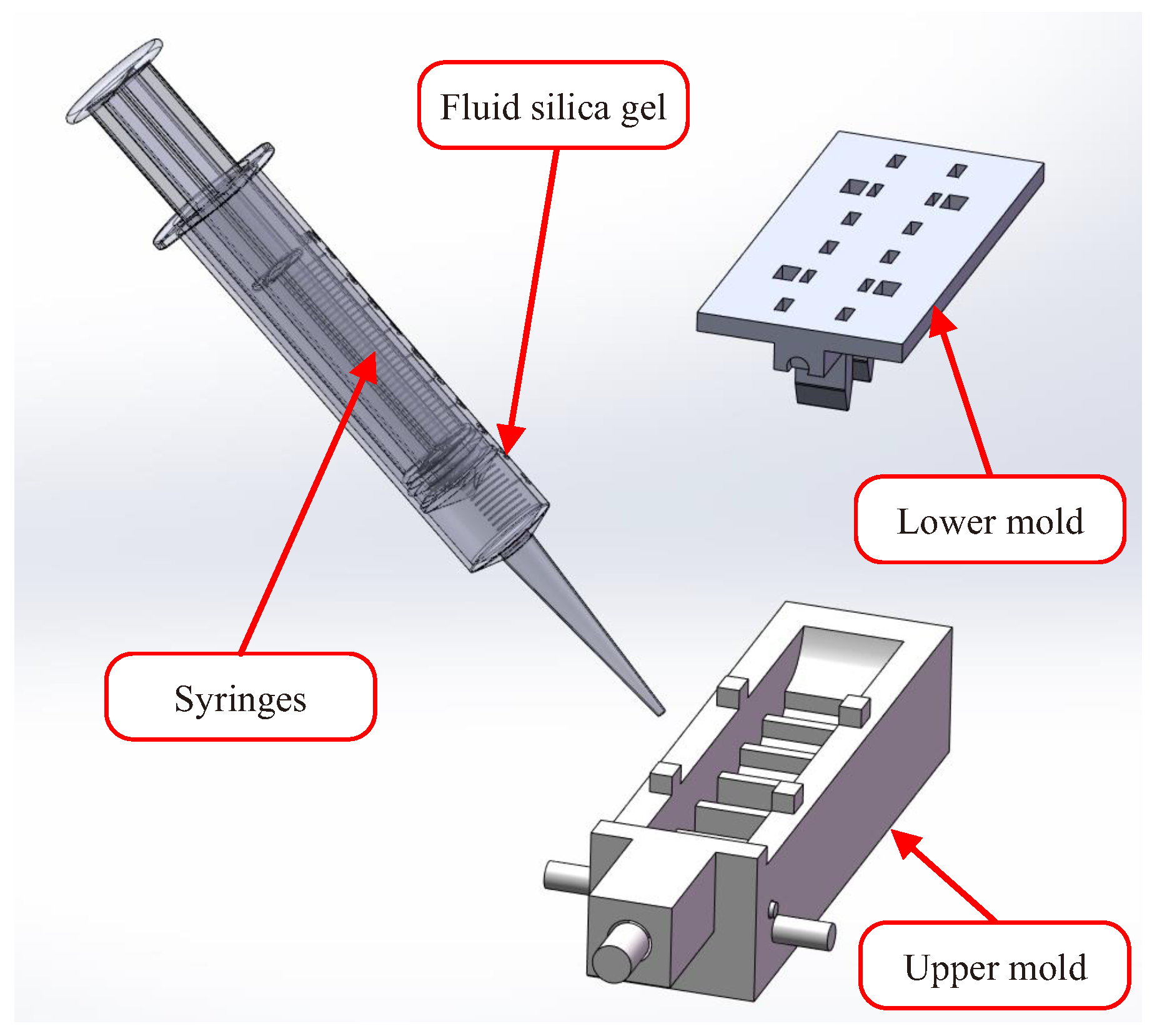
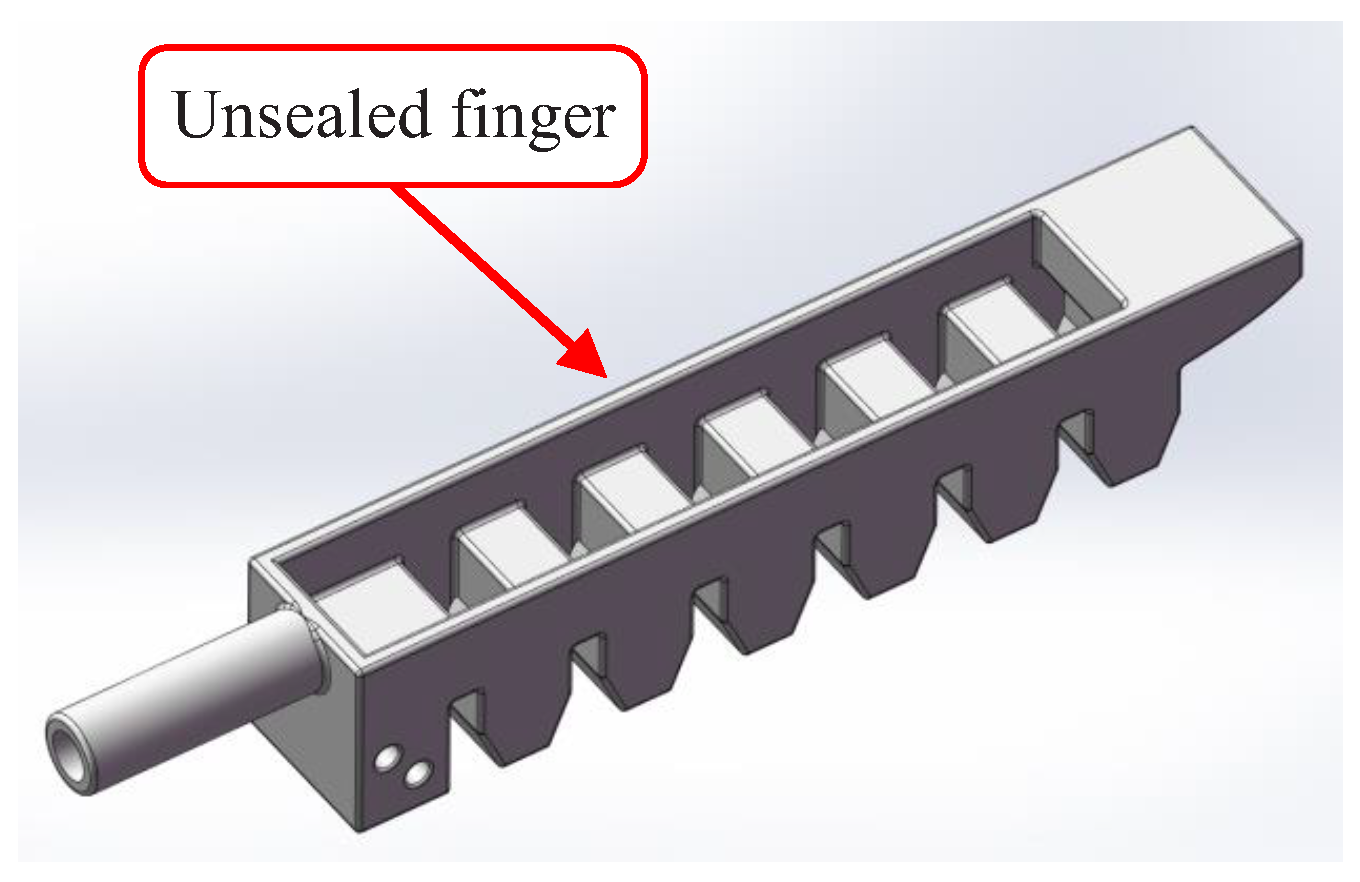
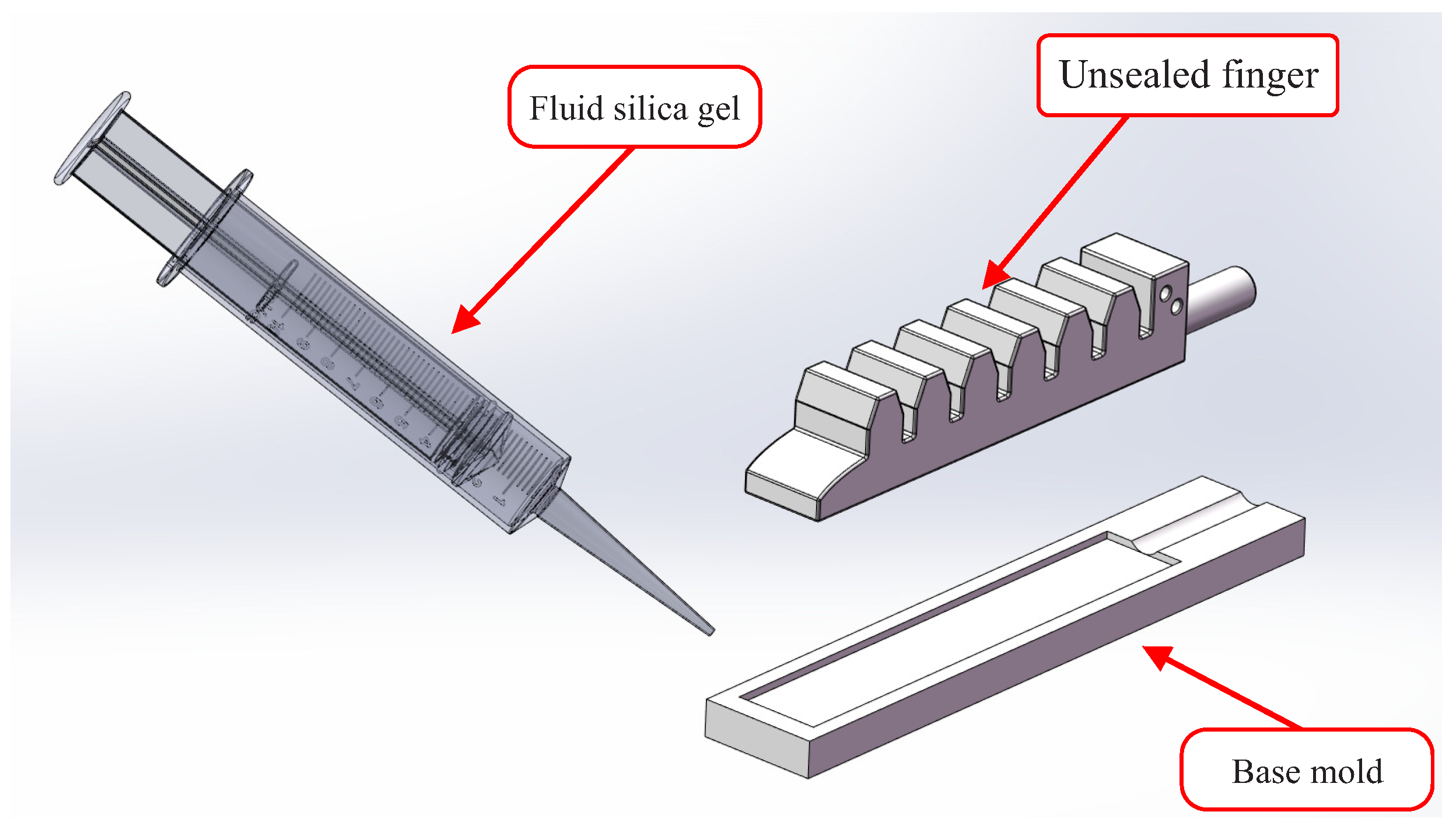
2.1. Fabrication Flow
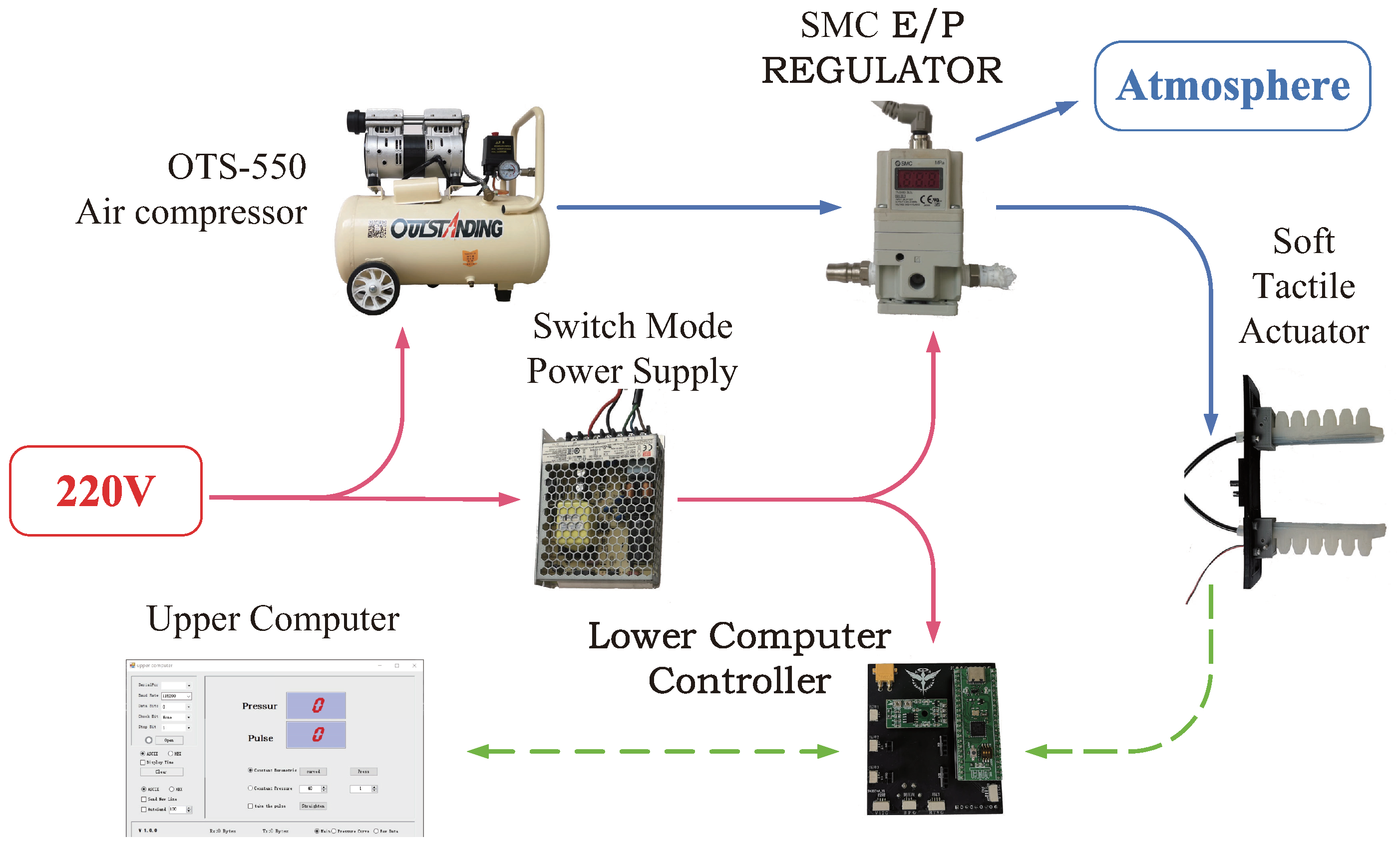
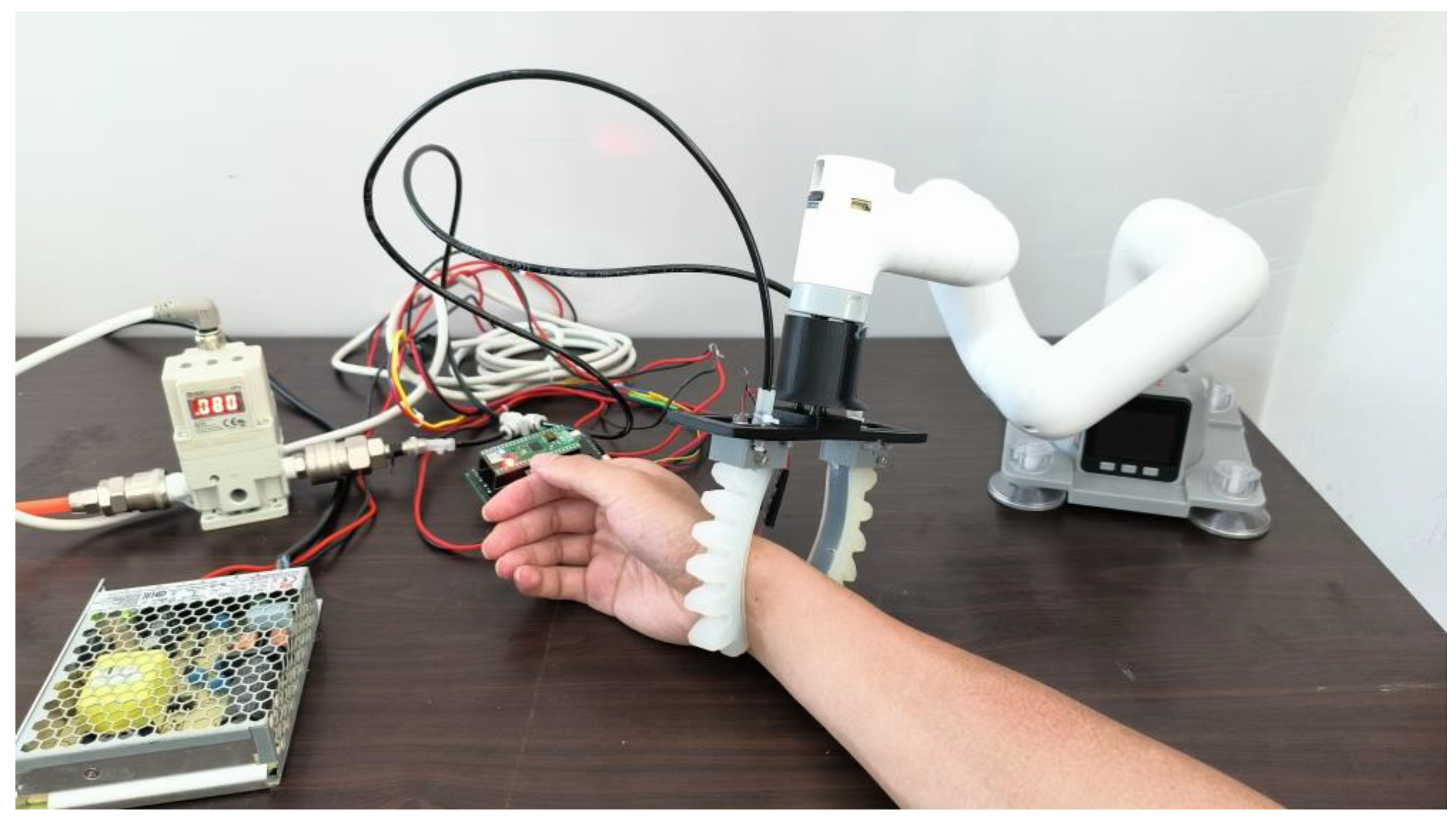
2.2. Experimental Platform
3. Detecting Position Training of the STA
3.1. Regulation of Compressed Air
3.2. Detecting Position Training
4. Tactile Sensing Scheme of STA
4.1. Pulse Detecting Mechanism
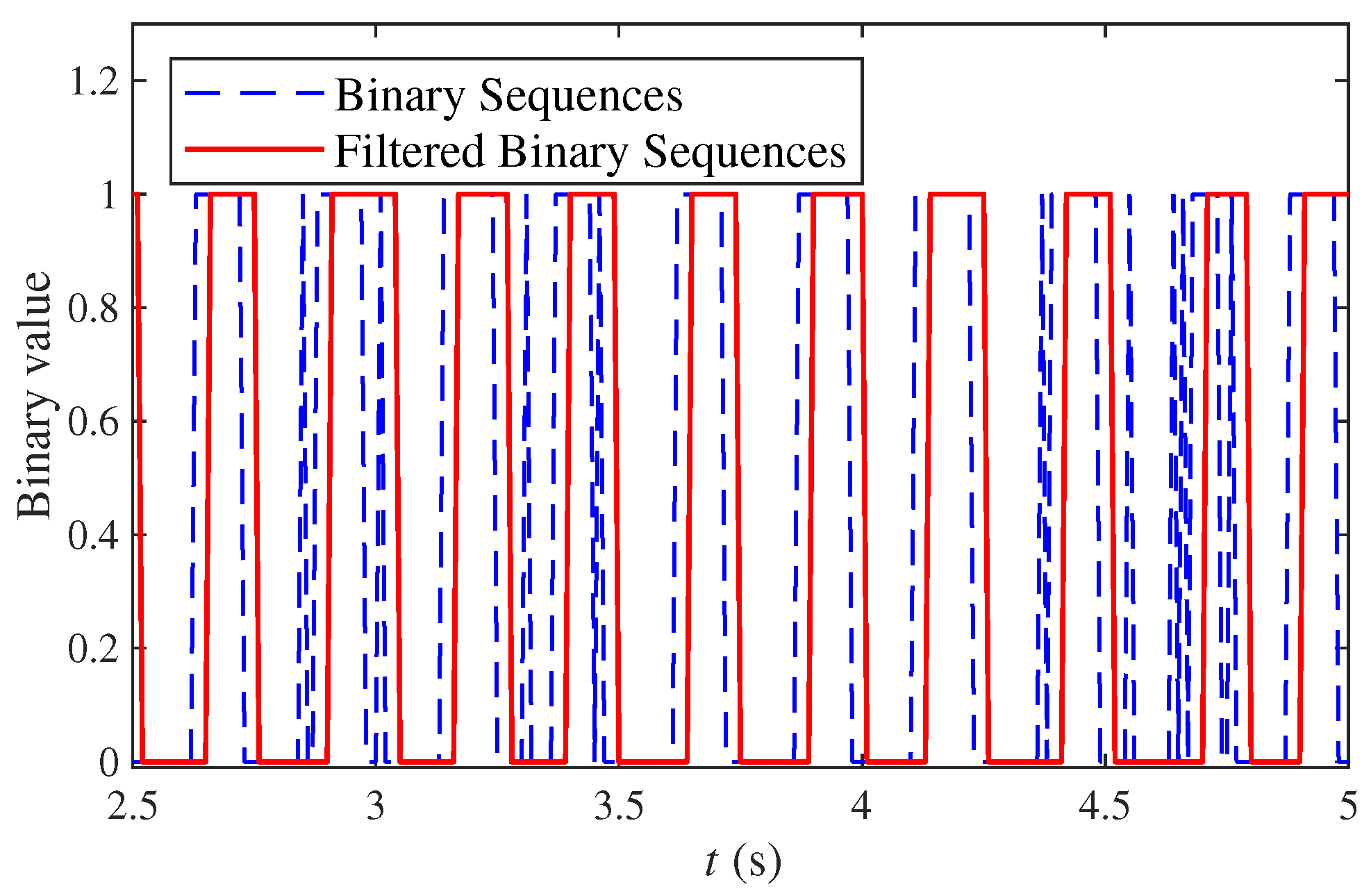
4.2. Tactile Sensing Algorithm
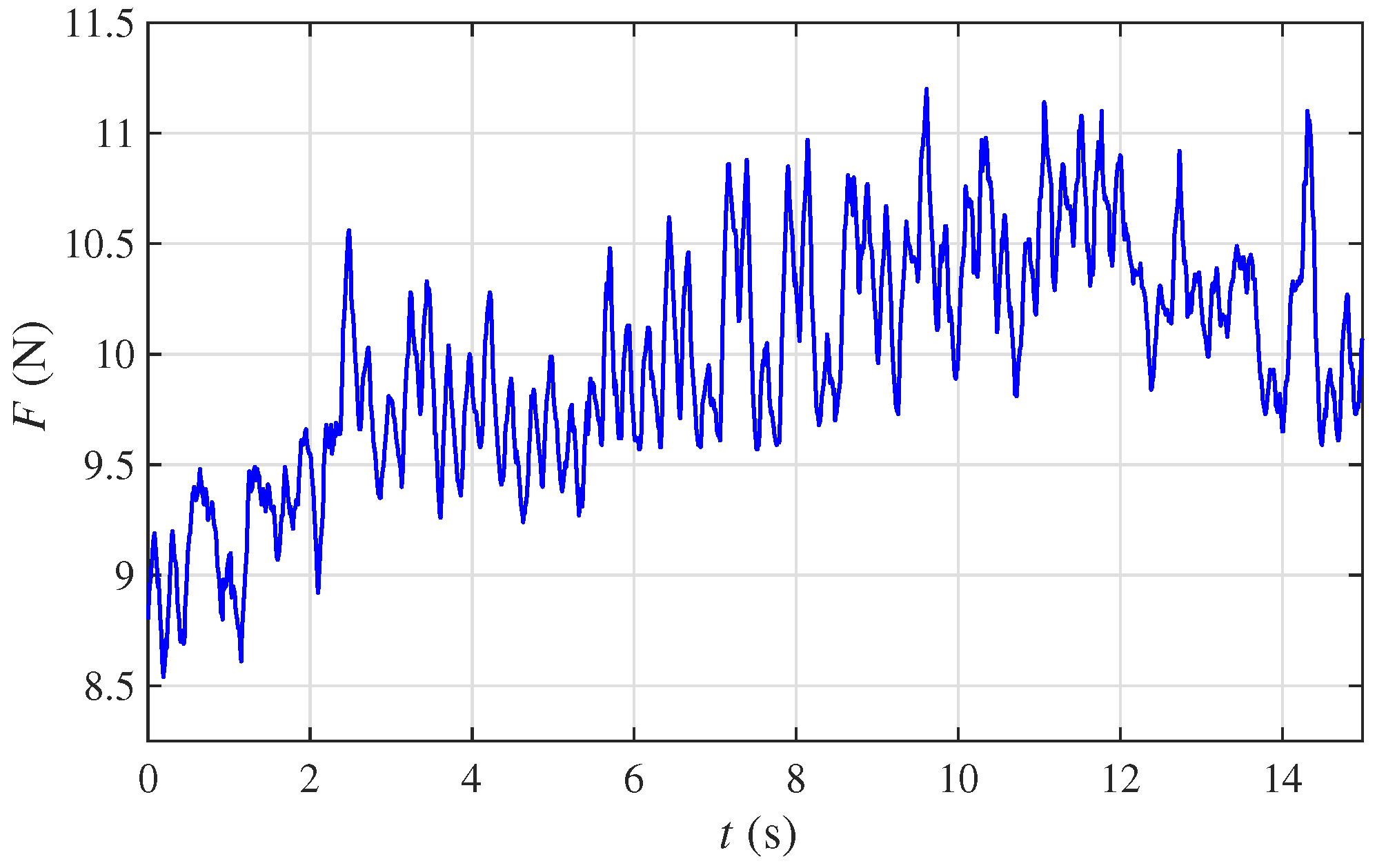
5. Pulse Detection Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X.; et al. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bartlett, N.W.; Tolley, M.T.; Overvelde, J.T.; Weaver, J.C.; Mosadegh, B.; Bertoldi, K.; Whitesides, G.M.; Wood, R.J. A 3D-printed, functionally graded soft robot powered by combustion. Science 2015, 349, 161–165. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, F.; Wang, H. Soft robotics: Morphology and morphology-inspired motion strategy. IEEE/CAA J. Autom. Sin. 2021, 8, 1500–1522. [Google Scholar] [CrossRef]
- Guo, J.; Xiang, C.; Helps, T.; Taghavi, M.; Rossiter, J. Electroactive textile actuators for wearable and soft robots. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 339–343. [Google Scholar]
- Kim, T.; Yoon, S.J.; Park, Y.L. Soft inflatable sensing modules for safe and interactive robots. IEEE Robot. Autom. Lett. 2018, 3, 3216–3223. [Google Scholar] [CrossRef]
- Zhou, C.; Yang, Y.; Wang, J.; Wu, Q.; Gu, Z.; Zhou, Y.; Liu, X.; Yang, Y.; Tang, H.; Ling, Q.; et al. Ferromagnetic soft catheter robots for minimally invasive bioprinting. Nat. Commun. 2021, 12, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Song, W.J.; Lee, Y.; Jung, Y.; Kang, Y.W.; Kim, J.; Park, J.M.; Park, Y.L.; Kim, H.Y.; Sun, J.Y. Soft artificial electroreceptors for noncontact spatial perception. Sci. Adv. 2021, 7, eabg9203. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Shahsavan, H.; Aghakhani, A.; Zeng, H.; Guo, Y.; Davidson, Z.S.; Priimagi, A.; Sitti, M. Bioinspired underwater locomotion of light-driven liquid crystal gels. Proc. Natl. Acad. Sci. USA 2020, 117, 5125–5133. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Y.; Zhao, H.; Mao, J.; Chirarattananon, P.; Helbling, E.F.; Hyun, N.s.P.; Clarke, D.R.; Wood, R.J. Controlled flight of a microrobot powered by soft artificial muscles. Nature 2019, 575, 324–329. [Google Scholar] [CrossRef] [PubMed]
- Ren, Z.; Zhang, R.; Soon, R.H.; Liu, Z.; Hu, W.; Onck, P.R.; Sitti, M. Soft-bodied adaptive multimodal locomotion strategies in fluid-filled confined spaces. Sci. Adv. 2021, 7, eabh2022. [Google Scholar] [CrossRef] [PubMed]
- Gu, G.Y.; Zhu, J.; Zhu, L.M.; Zhu, X. A survey on dielectric elastomer actuators for soft robots. Bioinspiration Biomim. 2017, 12, 011003. [Google Scholar] [CrossRef] [PubMed]
- Al-Rubaiai, M.; Pinto, T.; Qian, C.; Tan, X. Soft actuators with stiffness and shape modulation using 3D-printed conductive polylactic acid material. Soft Robot. 2019, 6, 318–332. [Google Scholar] [CrossRef] [PubMed]
- Chi, Y.; Tang, Y.; Liu, H.; Yin, J. Leveraging Monostable and Bistable Pre-Curved Bilayer Actuators for High-Performance Multitask Soft Robots. Adv. Mater. Technol. 2020, 5, 2000370. [Google Scholar] [CrossRef]
- Zhang, Z.; Ni, X.; Wu, H.; Sun, M.; Bao, G.; Wu, H.; Jiang, S. Pneumatically actuated soft gripper with bistable structures. Soft Robot. 2022, 9, 57–71. [Google Scholar] [CrossRef] [PubMed]
- Tang, Y.; Chi, Y.; Sun, J.; Huang, T.H.; Maghsoudi, O.H.; Spence, A.; Zhao, J.; Su, H.; Yin, J. Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots. Sci. Adv. 2020, 6, eaaz6912. [Google Scholar] [CrossRef] [PubMed]
- Drotman, D.; Jadhav, S.; Sharp, D.; Chan, C.; Tolley, M.T. Electronics-free pneumatic circuits for controlling soft-legged robots. Sci. Robot. 2021, 6, eaay2627. [Google Scholar] [CrossRef] [PubMed]
- Gai, L.; Zong, X. A Fully Soft Bionic Grasping Device with the Properties of Segmental Bending Shape and Automatically Adjusting Grasping Range. J. Bionic Eng. 2022. [Google Scholar] [CrossRef]
- Xu, H.; Shen, Z.; Gu, G. Performance characterization of ionic-hydrogel based strain sensors. Sci. China Technol. Sci. 2020, 63, 923–930. [Google Scholar] [CrossRef]
- Huang, P.; Wu, J.; Ye, W.; Wang, Y. Study of Soft Force and Displacement Sensor Based on Dielectric Elastomer. In Proceedings of the 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), Shenzhen, China, 18–21 December 2020; pp. 414–418. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (MPa) | P (MPa) | D (cm) |
|---|---|---|
| 0.09 | 0.036 | 0.90 |
| 0.10 | 0.040 | 2.50 |
| 0.11 | 0.044 | 2.35 |
| 0.12 | 0.048 | 2.55 |
| 0.13 | 0.052 | 2.90 |
| 0.14 | 0.056 | 3.10 |
| 0.15 | 0.060 | 3.40 |
| 0.16 | 0.064 | 3.50 |
| 0.17 | 0.068 | 3.75 |
| 0.18 | 0.072 | 4.15 |
| 0.19 | 0.076 | 4.40 |
| 0.20 | 0.080 | 4.60 |
| 0.21 | 0.084 | 4.90 |
| 0.22 | 0.088 | 5.20 |
| 0.23 | 0.092 | 5.30 |
| 0.24 | 0.096 | 5.55 |
| 0.25 | 0.010 | 5.90 |
| i | A | B | C | D | E |
|---|---|---|---|---|---|
| 1 | 66 | 66 | 74 | 75 | 72 |
| 2 | 65 | 66 | 74 | 78 | 71 |
| 3 | 66 | 67 | 73 | 80 | 74 |
| 4 | 63 | 63 | 74 | 76 | 74 |
| 5 | 64 | 69 | 72 | 78 | 75 |
| Volunteer | ||
|---|---|---|
| A | 65 | 65 |
| B | 66 | 68 |
| C | 74 | 74 |
| D | 77 | 78 |
| E | 74 | 75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Li, X.; Wang, J.; Zhang, Y.; Mei, J. Human Pulse Detection by a Soft Tactile Actuator. Sensors 2022, 22, 5047. https://doi.org/10.3390/s22135047
Huang Z, Li X, Wang J, Zhang Y, Mei J. Human Pulse Detection by a Soft Tactile Actuator. Sensors. 2022; 22(13):5047. https://doi.org/10.3390/s22135047
Chicago/Turabian StyleHuang, Zixin, Xinpeng Li, Jiarun Wang, Yi Zhang, and Jingfu Mei. 2022. "Human Pulse Detection by a Soft Tactile Actuator" Sensors 22, no. 13: 5047. https://doi.org/10.3390/s22135047
APA StyleHuang, Z., Li, X., Wang, J., Zhang, Y., & Mei, J. (2022). Human Pulse Detection by a Soft Tactile Actuator. Sensors, 22(13), 5047. https://doi.org/10.3390/s22135047