
An Adaptive Filtering Method for Cooperative Localization in Leader–Follower AUVs


Abstract
:1. Introduction
2. Multi-AUV Cooperative Localization Method Based on an EKF
2.1. State Model
2.2. Measurement Model
2.3. Cooperative Localization Algorithm Based on an EKF
3. Adaptive Cooperative Localization Algorithm
3.1. Sage–Husa Adaptive Kalman Filter Algorithm
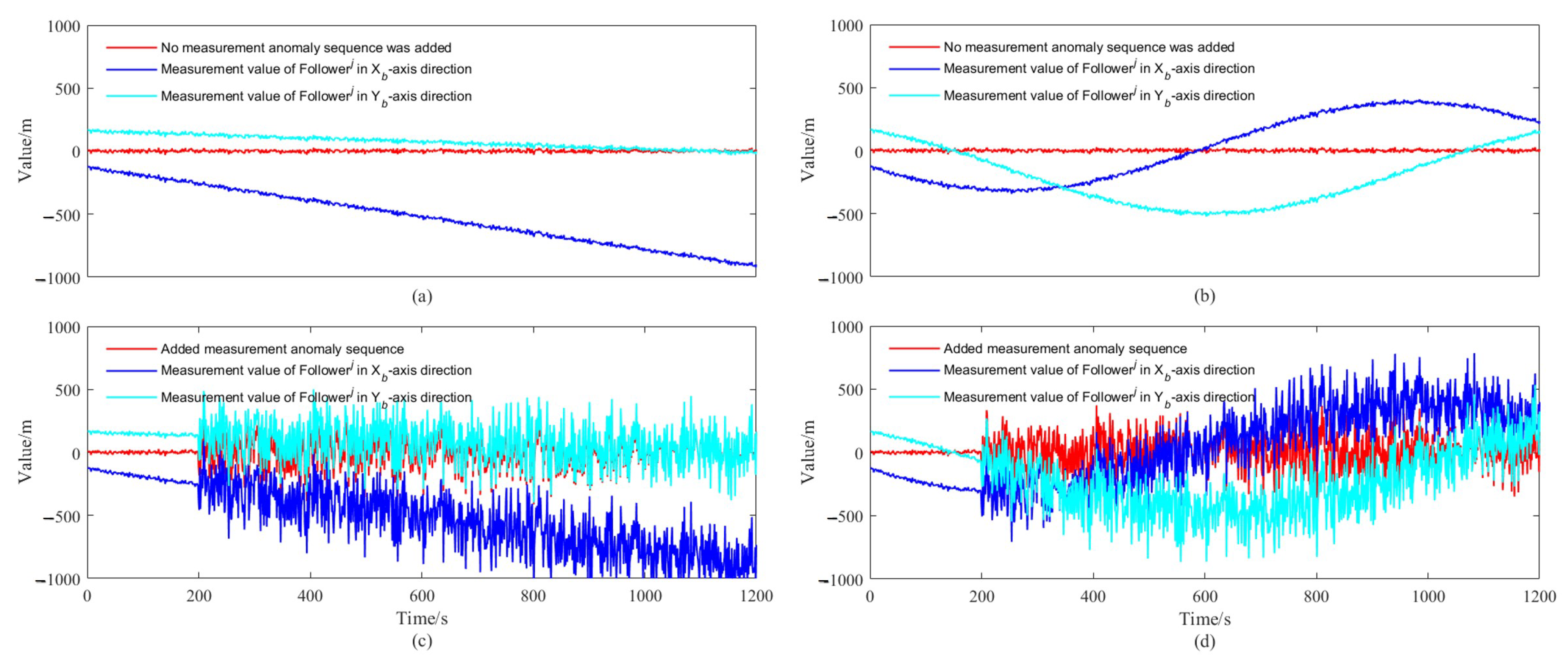
3.2. Measurement Anomaly Detection
3.3. Adjustment of Measurement Noise Covariance Matrix
4. Simulation and Result Analysis
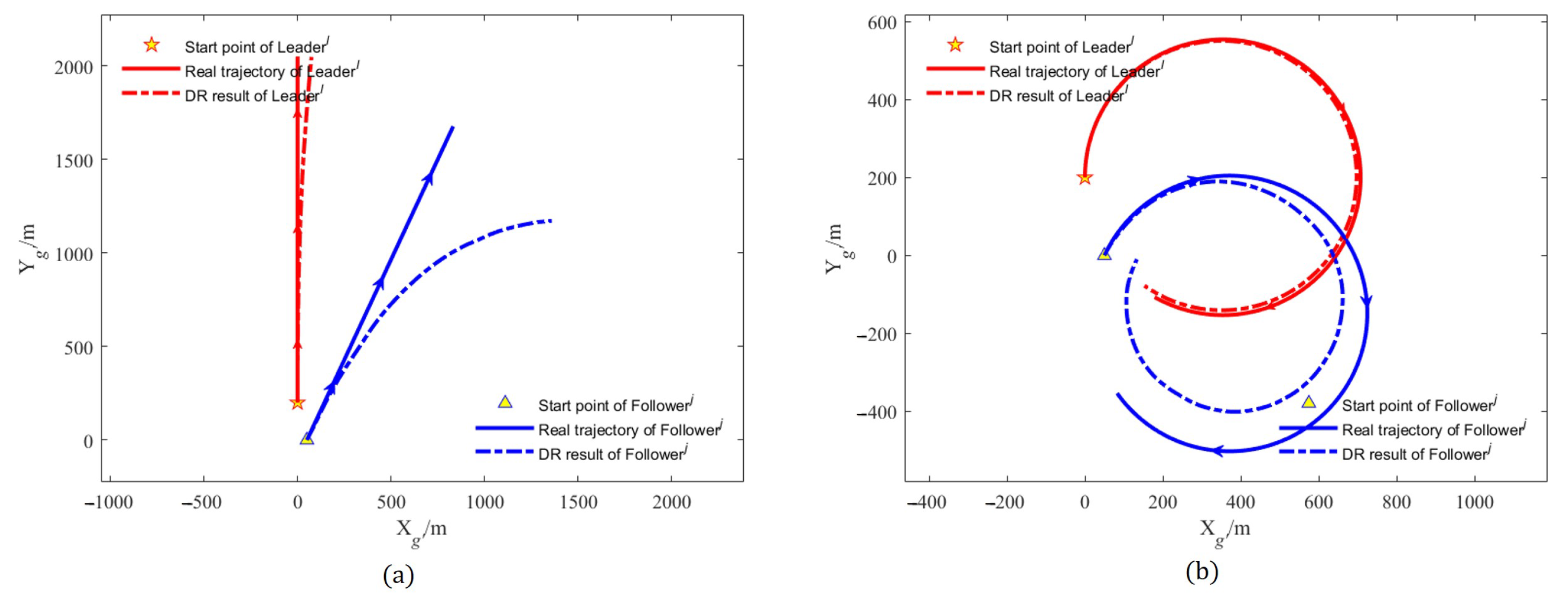
4.1. Monte Carlo Simulation
4.2. Comparison and Analysis of Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AUV | autonomous underwater vehicle; |
| KF | Kalman filter; |
| EKF | extended Kalman filter; |
| UKF | unscented Kalman filter; |
| SHAEKF | Sage–Husa adaptive extended Kalman filter; |
| ENU | east, north, and up; |
| DR | dead reckoning; |
| GNSS | Global Navigation Satellite System; |
| DVL | Doppler velocity log; |
| INS | inertial navigation system; |
| IMU | inertial measurement unit; |
| MAP | maximum a posteriori; |
| ARMSE | the average root mean square of localization errors; |
| ASDE | the average standard deviation of localization errors. |
References
- Fallon, M.F.; Papadopoulos, G.; Leonard, J.J.; Patrikalakis, N.M. Cooperative AUV Navigation using a Single Maneuvering Surface Craft. Int. J. Robot. Res. 2010, 29, 1461–1474. [Google Scholar] [CrossRef] [Green Version]
- Caiti, A.; Calabrò, V.; Fabbri, T.; Fenucci, D.; Munafò, A. Underwater communication and distributed localization of AUV teams. In Proceedings of the 2013 MTS/IEEE OCEANS-Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–8. [Google Scholar]
- Kebkal, K.G.; Mashoshin, A.I. AUV acoustic positioning methods. Gyroscopy Navig. 2017, 8, 80–89. [Google Scholar] [CrossRef]
- Kim, Y.; Bang, H. Introduction to Kalman filter and its applications. In Introduction and Implementations of the Kalman Filter; Govaers, F., Ed.; IntechOpen: London, UK, 2018; Volume 1, pp. 1–16. [Google Scholar]
- Shao, X.; He, B.; Guo, J.; Yan, T. The application of AUV navigation based on adaptive extended Kalman filter. In Proceedings of the Oceans 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar]
- Wang, J.; Xu, T.; Wang, Z. Adaptive Robust Unscented Kalman Filter for AUV Acoustic Navigation. Sensors 2019, 20, 60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, L.; Cheng, X.-H.; Li, S.-X.; Gao, H.-T. Adaptive interacting multiple model filter for AUV integrated navigation. J. Chin. Inert. Technol. 2016, 24, 511–516. [Google Scholar] [CrossRef]
- Zhang, X.; He, B.; Gao, S.; Mu, P.; Xu, J.; Zhai, N. Multiple model AUV navigation methodology with adaptivity and robustness. Ocean Eng. 2022, 254, 111258. [Google Scholar] [CrossRef]
- Xu, B.; Li, S.; Wang, L.; Duan, T.; Yao, H. A multi-AUV cooperative localization method based on adaptive neuro-fuzzy inference system. J. Chin. Inert. Technol. 2019, 27, 440–447. [Google Scholar] [CrossRef]
- Loebis, D.; Sutton, R.; Chudley, J.; Naeem, W. Adaptive tuning of a Kalman filter via fuzzy logic for an intelligent AUV navigation system. Control Eng. Pract. 2004, 12, 1531–1539. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, S.H.; Wang, Z.; Hu, R.; Feng, M.; Du, P.; Yang, W.; Chen, Y. Design and experimental results of passive iUSBL for small AUV navigation. Ocean Eng. 2022, 248, 110812. [Google Scholar] [CrossRef]
- Li, W.-B.; Liu, M.-Y.; Li, H.-X.; Chen, X.-Y. Localization Performance Analysis of Cooperative Navigation System for Multiple AUVs Based on Relative Position Measurements with a Single Leader. Acta Autom. Sin. 2011, 37, 724–736. [Google Scholar]
- Faghihinia, A.; Amiri Atashgah, M.A.; Mehdi Dehghan, S.M. Analytical Expression for Uncertainty Propagation of Aerial Cooperative Navigation. Aviation 2021, 25, 10–21. [Google Scholar] [CrossRef]
- Mourikis, A.I.; Roumeliotis, S.I. Performance analysis of multirobot Cooperative localization. IEEE Trans. Robot. 2006, 22, 666–681. [Google Scholar] [CrossRef]
- Sage, A.P.; Husa, G.W. Adaptive filtering with unknown prior statistics. In Proceedings of the Joint Automatic Control Conference, Washington, DC, USA, 7–9 May 1969; pp. 760–769. [Google Scholar]
- Crespillo, O.G.A.; Grosch, A.; Skaloud, J.; Meurer, M. Innovation vs Residual KF Based GNSS/INS Autonomous Integrity Monitoring in Single Fault Scenario. In Proceedings of the 30th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 2126–2136. [Google Scholar]
- Chang, G. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Sun, J.; Xu, X.; Liu, Y.; Zhang, T.; Li, Y. FOG Random Drift Signal Denoising Based on the Improved AR Model and Modified Sage-Husa Adaptive Kalman Filter. Sensors 2016, 16, 1073. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H.; Sabat, S.L. MEMS-Based IMU Drift Minimization: Sage Husa Adaptive Robust Kalman Filtering. IEEE Sens. J. 2020, 20, 250–260. [Google Scholar] [CrossRef]
- Zhai, H.Q.; Wang, L.H. The robust residual-based adaptive estimation Kalman filter method for strap-down inertial and geomagnetic tightly integrated navigation system. Rev. Sci. Instrum. 2020, 91, 104501. [Google Scholar] [CrossRef] [PubMed]
- Zha, F.; Guo, S.; Li, F. An improved nonlinear filter based on adaptive fading factor applied in alignment of SINS. Optik 2019, 184, 165–176. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Parameter Values | |
|---|---|---|
| Simulation time, s | 1200 | |
| Sampling frequency, Hz | 1 | |
| Monte Carlo simulation times | 1000 | |
| Leader AUV | Start point coordinates, m | (0, 200) |
| Forward motion velocity, (m · s−1) | (1852/3600) | |
| Start point heading angle, rad | /180) | |
| Random error of forward motion velocity, (m · s−1) | ±0.005 | |
| Random error of heading angle, (rad · s−1) | ±0.1 | |
| Gyro bias, (rad · h−1) | /180) | |
| Follower AUV | Start point coordinates, m | (50, 0) |
| Forward motion velocity, (m · s−1) | (1852/3600) | |
| Start point heading angle, rad | /180) | |
| Random error of forward motion velocity, (m · s−1) | ±0.025 | |
| Random error of heading angle, (rad · s−1) | ±0.5 | |
| Gyro bias, (rad · h−1) | /180) | |
| Simulation Conditions in the Time Period 200–1200 s | ARMSE (m) of When AUVs Moved Along a Straight Line | ARMSE (m) of when AUVs Moved Along a Curve | ||||
|---|---|---|---|---|---|---|
| DR | EKF | Improved SHAEKF | DR | EKF | Improved SHAEKF | |
| Steady state | 176.3030 | 17.4726 | 16.3846 | 118.1430 | 16.2329 | 14.3517 |
| Abnormal measurement | 176.3030 | 20.9517 | 13.0884 | 118.1430 | 27.1199 | 11.9600 |
| Percentage change (%) | 0 | 19.9 | 0 | 67.1 | ||
| Simulation Conditions in the Time Period 200–1200 s | ASDE (m) of when AUVs Moved Along a Straight Line | ASDE (m) of When AUVs Moved Along a Curve | ||||
|---|---|---|---|---|---|---|
| DR | EKF | Improved SHAEKF | DR | EKF | Improved SHAEKF | |
| Steady state | 64.5837 | 9.2438 | 8.7528 | 34.3510 | 7.7098 | 6.9763 |
| Abnormal measurement | 64.5837 | 10.6673 | 7.5491 | 34.3510 | 13.7229 | 5.7479 |
| Percentage change (%) | 0 | 15.4 | 0 | 78.0 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Dai, H.-Y.; Lang, L.; Zhang, M. An Adaptive Filtering Method for Cooperative Localization in Leader–Follower AUVs. Sensors 2022, 22, 5016. https://doi.org/10.3390/s22135016
Zhao L, Dai H-Y, Lang L, Zhang M. An Adaptive Filtering Method for Cooperative Localization in Leader–Follower AUVs. Sensors. 2022; 22(13):5016. https://doi.org/10.3390/s22135016
Chicago/Turabian StyleZhao, Lin, Hong-Yi Dai, Lin Lang, and Ming Zhang. 2022. "An Adaptive Filtering Method for Cooperative Localization in Leader–Follower AUVs" Sensors 22, no. 13: 5016. https://doi.org/10.3390/s22135016
APA StyleZhao, L., Dai, H.-Y., Lang, L., & Zhang, M. (2022). An Adaptive Filtering Method for Cooperative Localization in Leader–Follower AUVs. Sensors, 22(13), 5016. https://doi.org/10.3390/s22135016