
Study on the Pressure Regulation Method of New Automatic Pressure Regulating Valve in the Electronically Controlled Pneumatic Brake Systems in Commercial Vehicles



Abstract
:1. Introduction
2. Working Principle of the ECPBS and the LF-APRV for Driving Automation in Commercial Vehicles
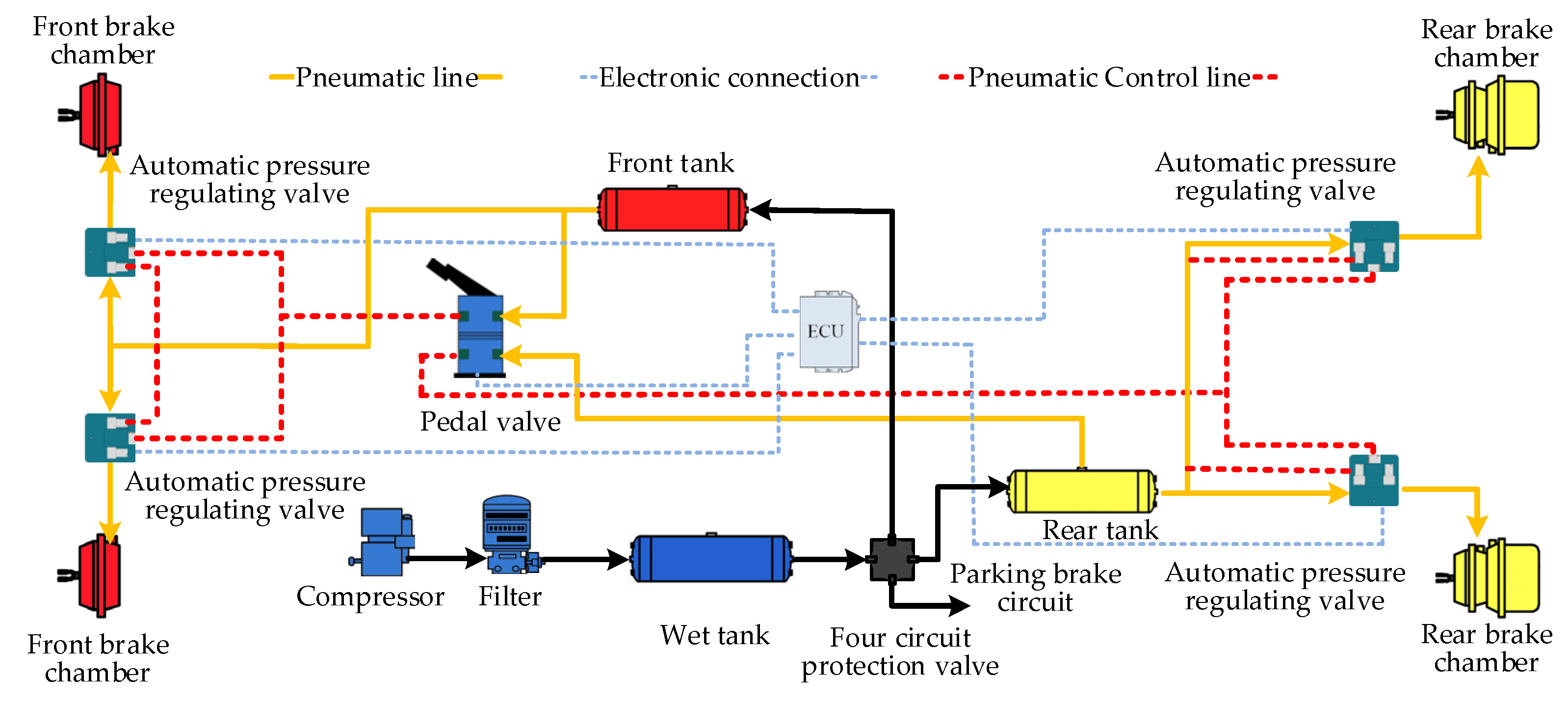
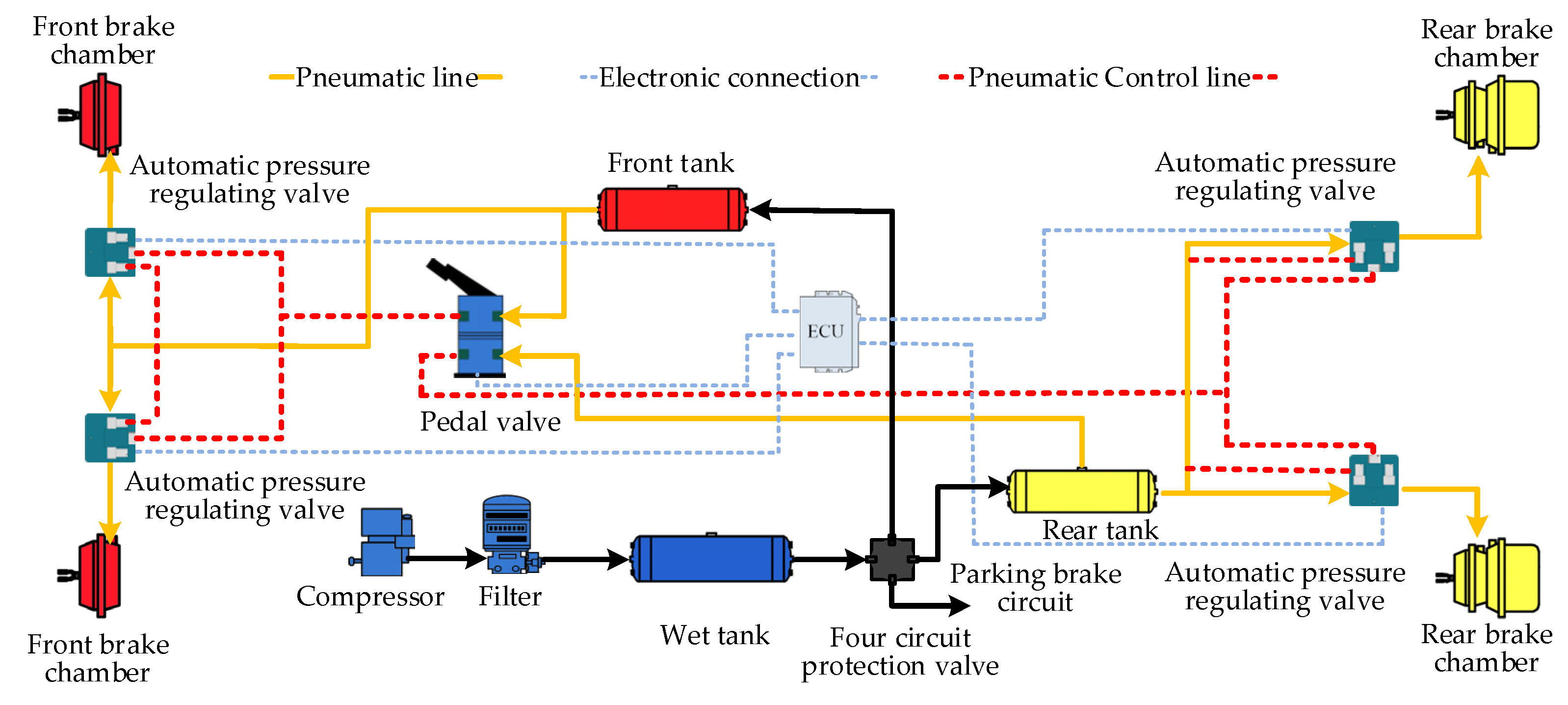
2.1. Working Principle of the ECPBS for Driving Automation in Commercial Vehicles
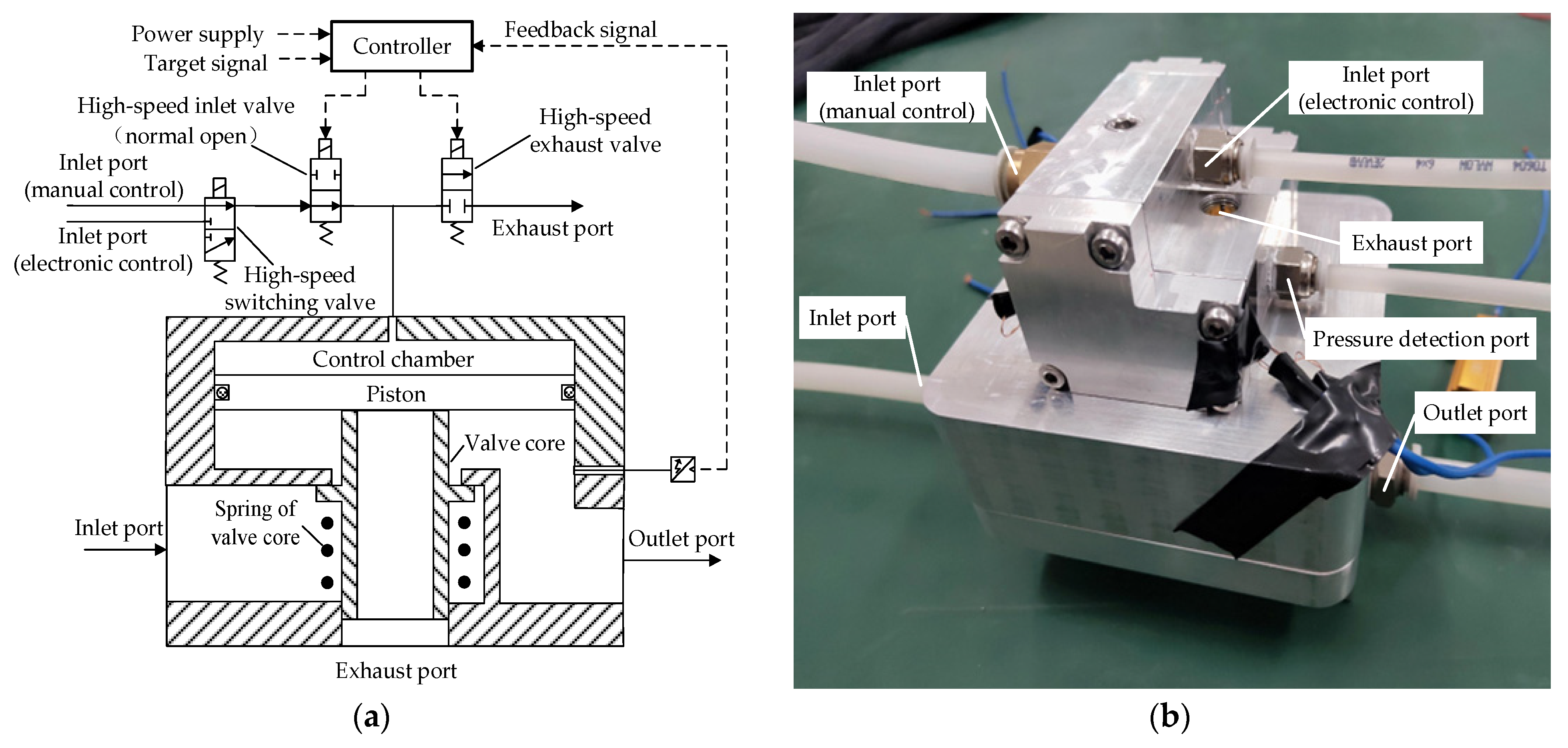
2.2. Working Principle of the LF-APRV in the ECPBS of Commercial Vehicles for Driving Automation
3. Theoretical Analysis and Simulation Model of Pressure Regulation Characteristics of the LF-APRV in the ECPBS in Commercial Vehicles
3.1. Theoretical Analysis of Pressure Regulation Characteristics of the LF-APRV in the ECPBS in Commercial Vehicles
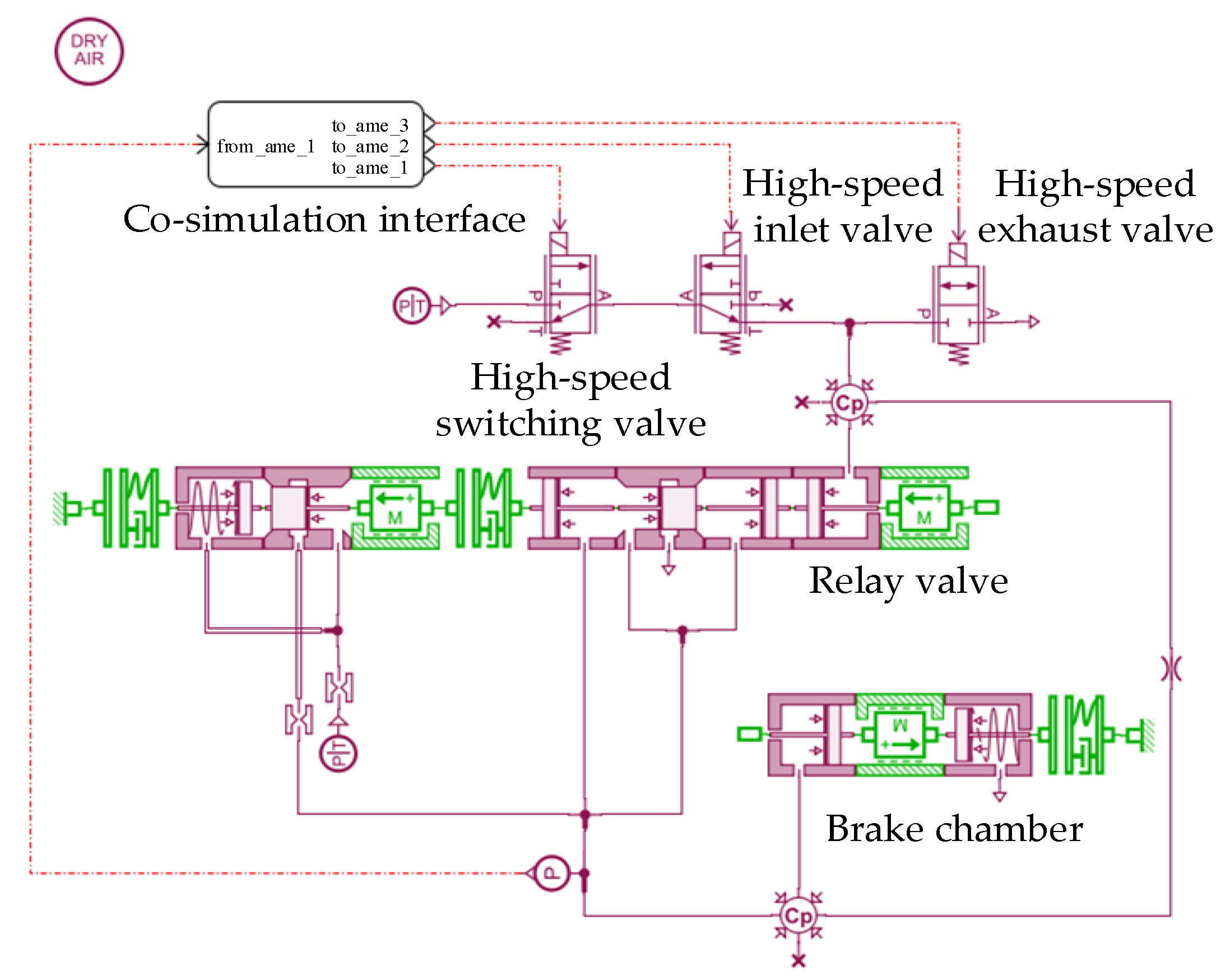
3.2. Simulation Model of Pressure Regulation Characteristics of the LF-APRV in the ECPBS in Commercial Vehicles
4. Dynamic PWM Coupling Pressure Regulation Method of the LF-APRV and the Simulation Model
4.1. Dynamic PWM Coupling Pressure Regulation Method of the LF-APRV
- (1)
- Fast pressurization working mode: At the beginning of the pressurization process, the outlet pressure of the LF-APRV needs to quickly approach the target pressure, so the on/off pressure regulation method is adopted. The high-speed inlet valve is open and the high-speed exhaust valve is closed, and the duty cycles of the control signals of the two high-speed solenoid valves are both 0.
- (2)
- Slow pressurization working mode: When the outlet pressure of the LF-APRV is close to the target pressure. The PWM pressure regulation method is adopted to reduce the overshoot and ensure the stability of the pressure regulation, and the control signals of the high-speed inlet valve and high-speed exhaust valve are set respectively as PWM signals with duty cycles of C1 and C2.
- (3)
- Pressure-maintaining working mode: When the outlet pressure of the LF-APRV is equal to the target pressure or the difference is within a certain range, the high-speed inlet valve and high-speed exhaust valve close, and the duty cycle of the control signal of the high-speed inlet valve is 1 and the duty cycle of the control signal of the high-speed exhaust valve is 0.
- (4)
- Fast decompression working mode: At the beginning of the decompression process, the outlet pressure of the LF-APRV needs to be released quickly, so the on/off pressure regulation method is adopted to realize rapid decompression, and the duty cycle of the control signals of the two high-speed solenoid valves are both 1.
- (5)
- Slow decompression working mode: To reduce the overshoot and maintain the stability in the decompression process, the PWM pressure regulation method is adopted. The control signals the of the high-speed inlet valve and high-speed exhaust valve are respectively set as PWM signals with duty cycles of C3 and C4 to slow the pressure reduction.
4.2. Simulation Model of the Dynamic PWM Coupling Pressure Regulation Method of the LF-APRV
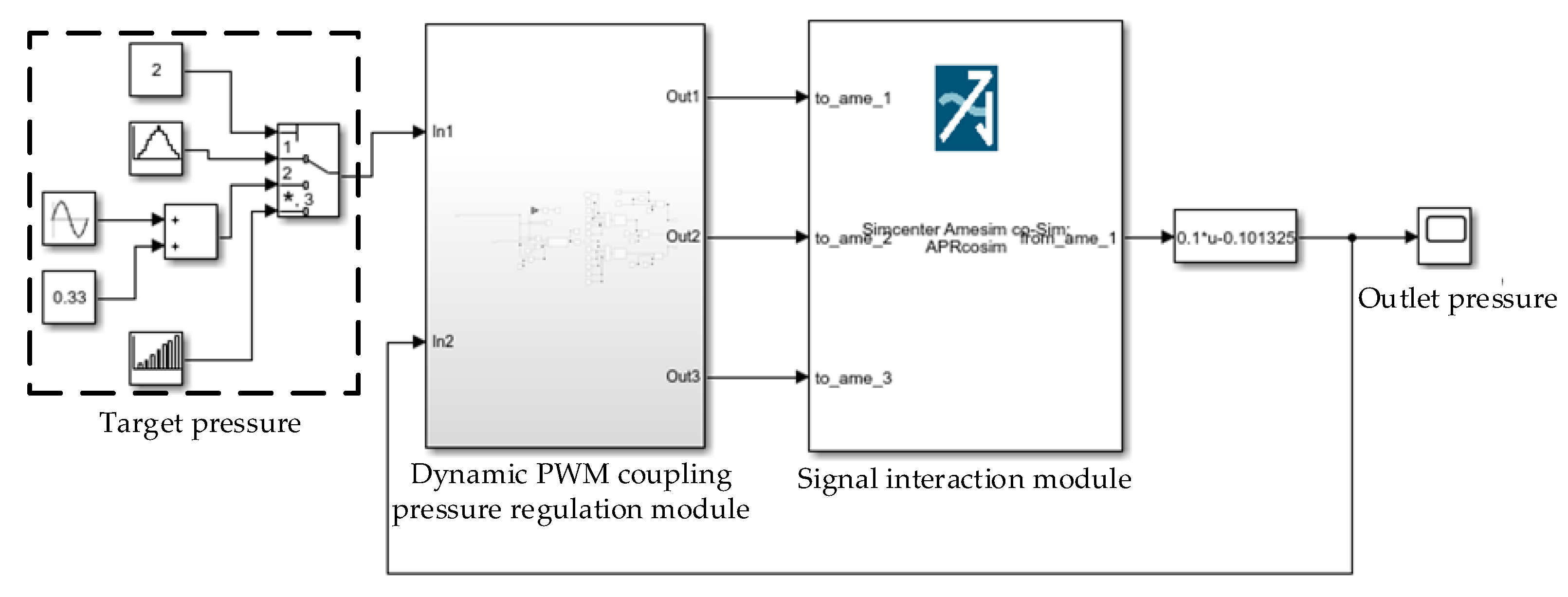
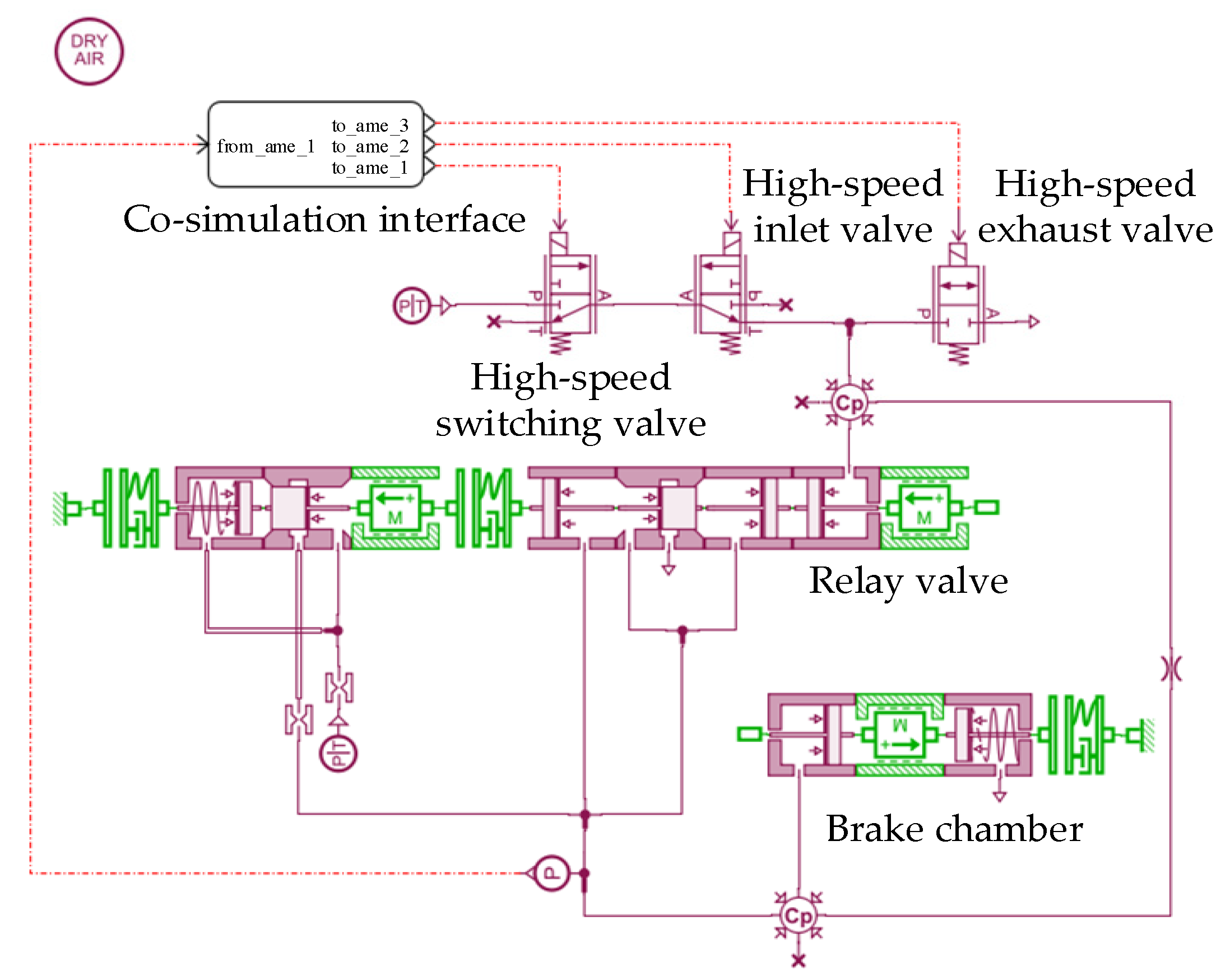
4.3. Co-Simulation Model for the LF-APRV and the Dynamic PWM Coupling Pressure Regulation Method
5. Test and Analysis of the Pressure Regulation Method of the LF-APRV in ECPBS in Commercial Vehicles
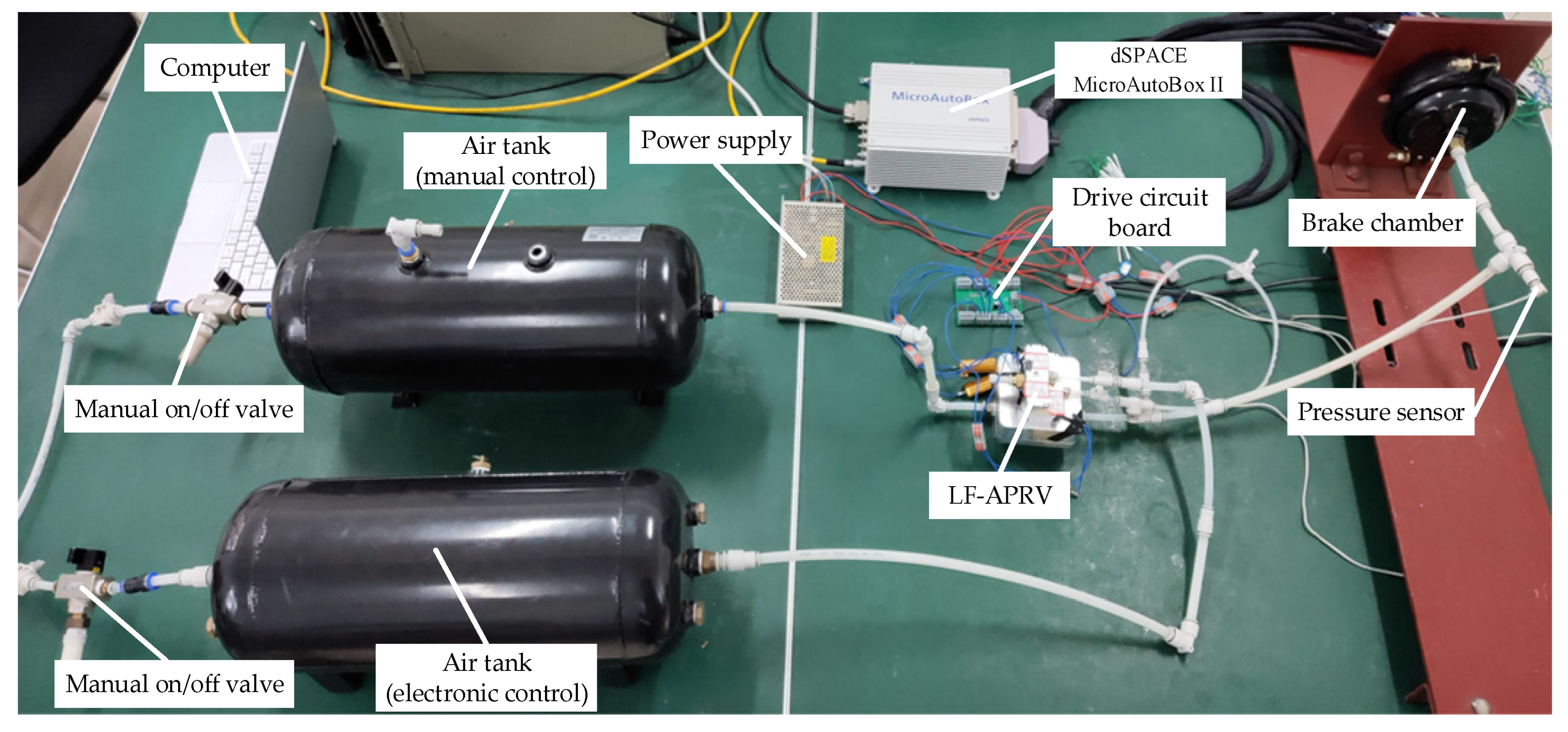
5.1. Performance Test System of Dynamic PWM Coupling Pressure Regulation Method of the LF-APRV
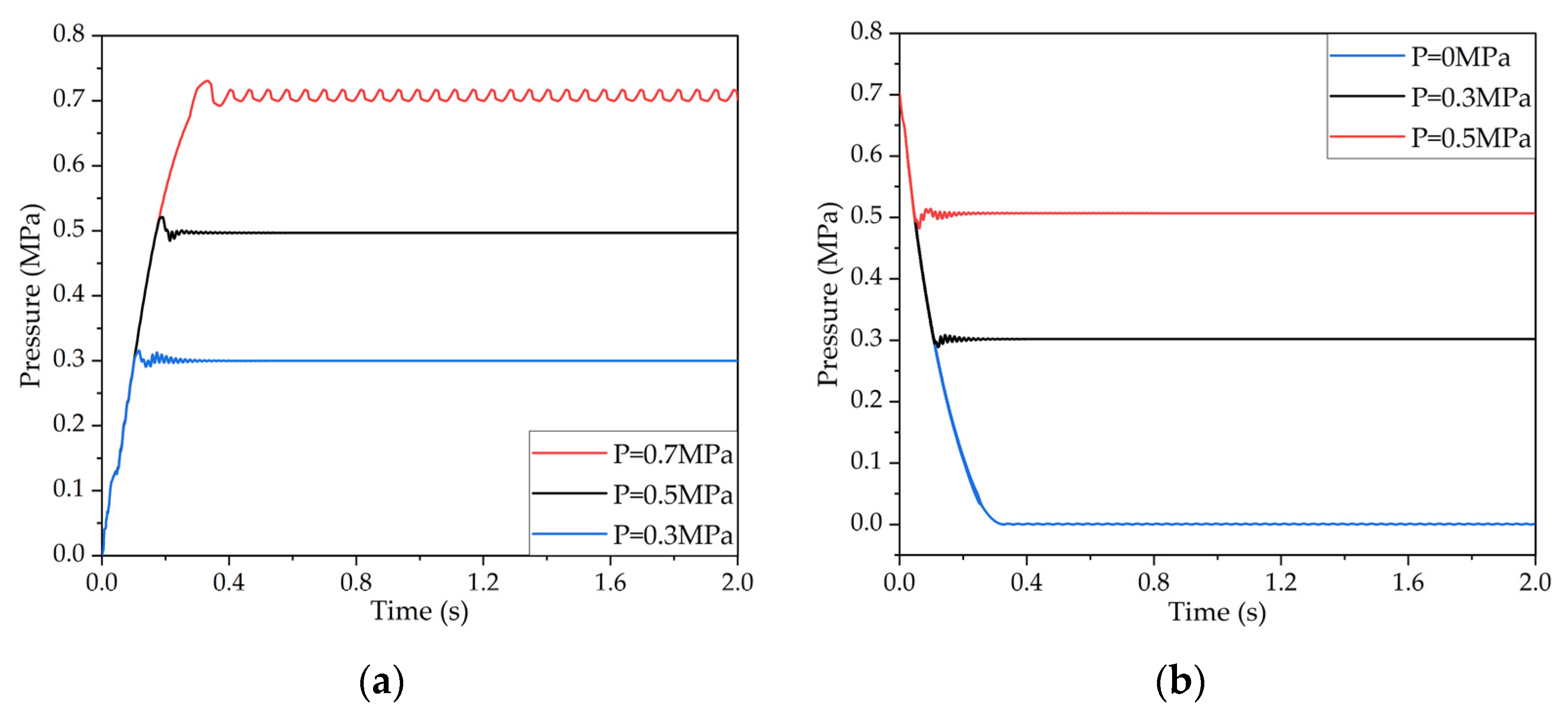
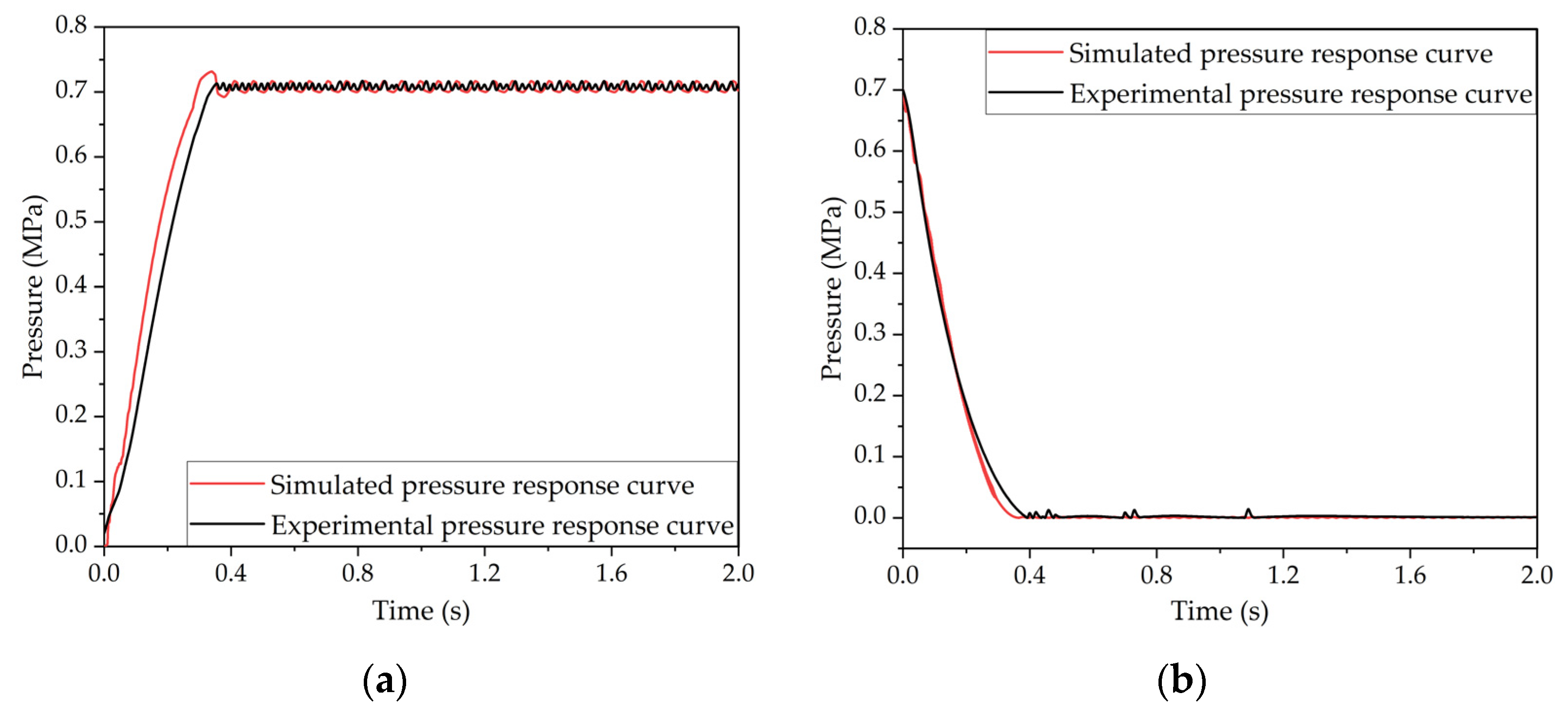
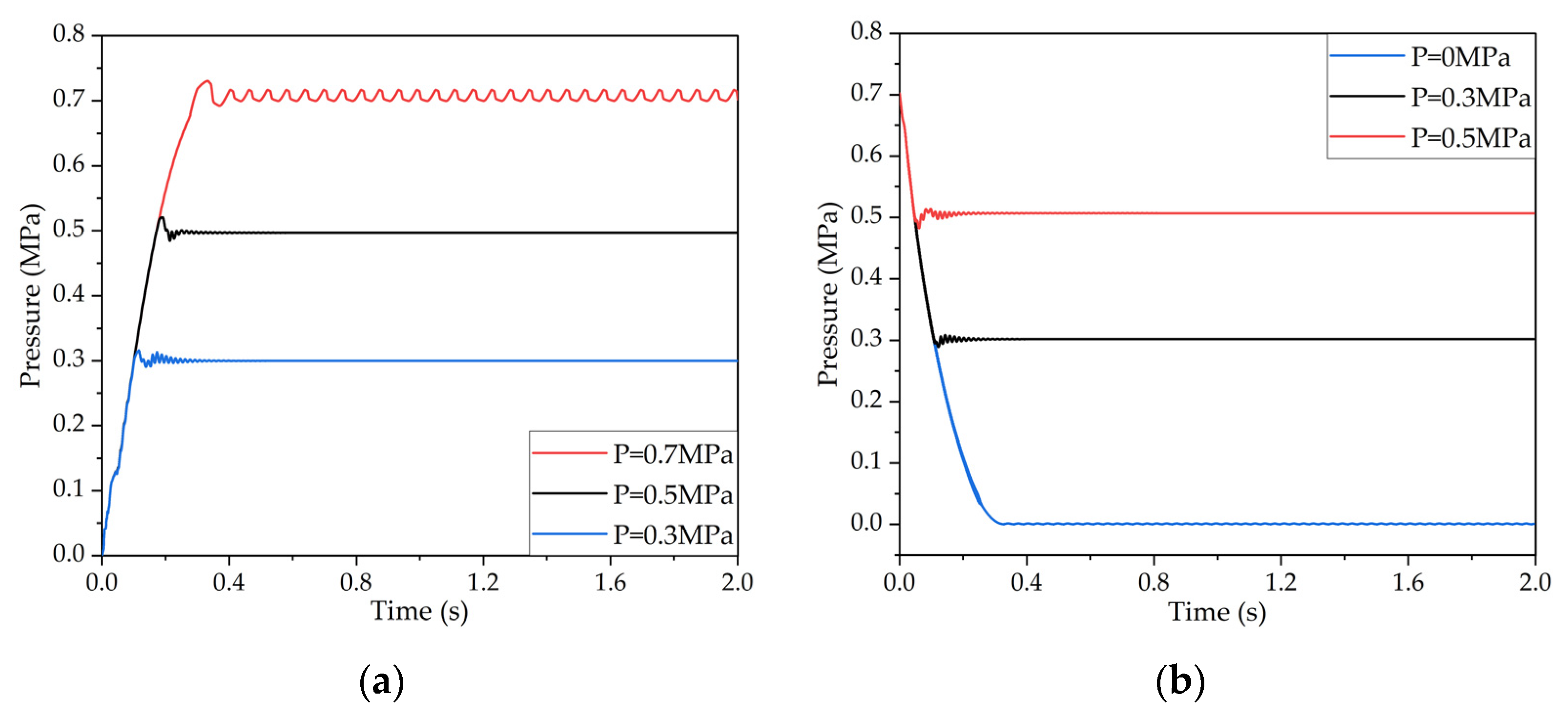
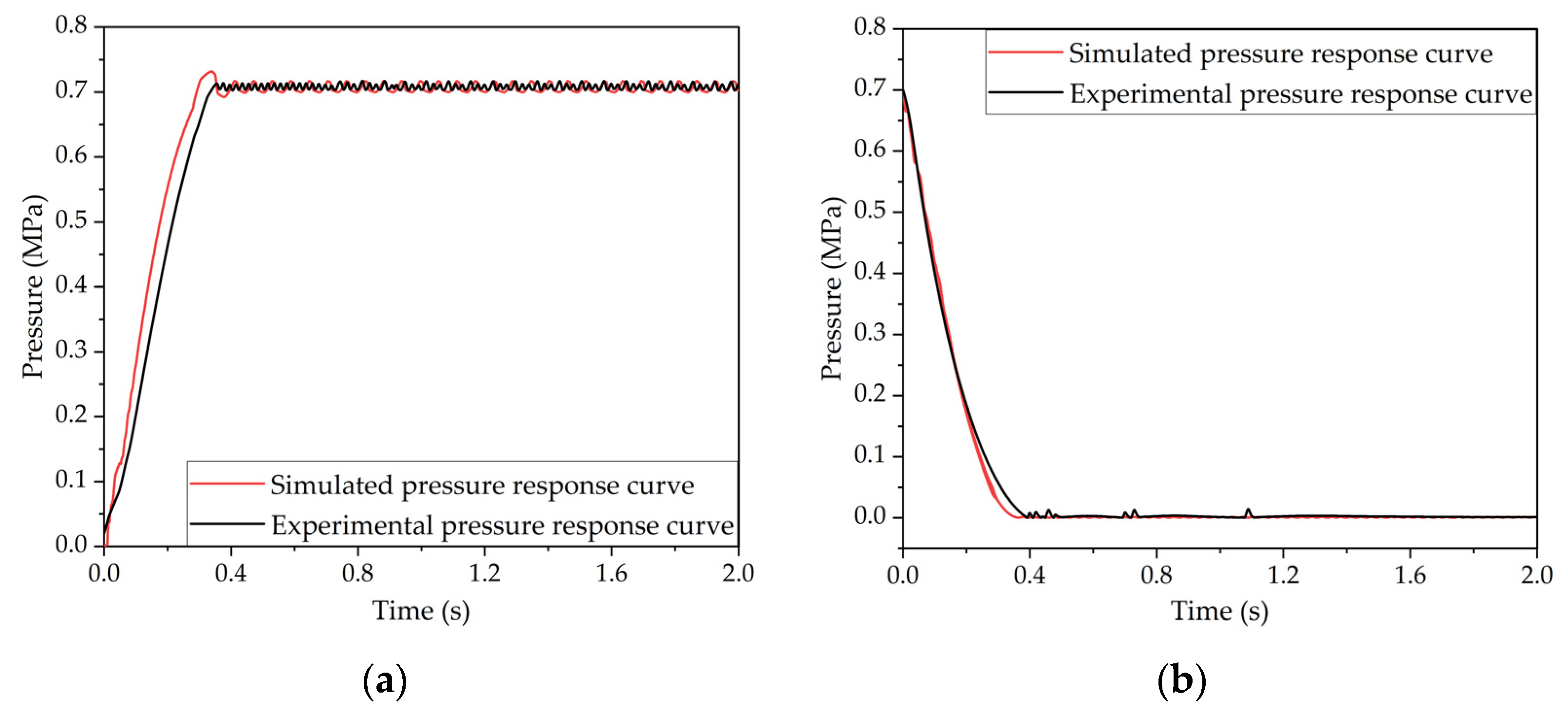
5.2. Verification of the Co-Simulation Model for the LF-APRV and the Dynamic PWM Coupling Pressure Regulation Method
6. Test-Based Pressure Regulation Performance Analysis of the Dynamic PWM Coupling Pressure Regulation Method of the LF-APRV
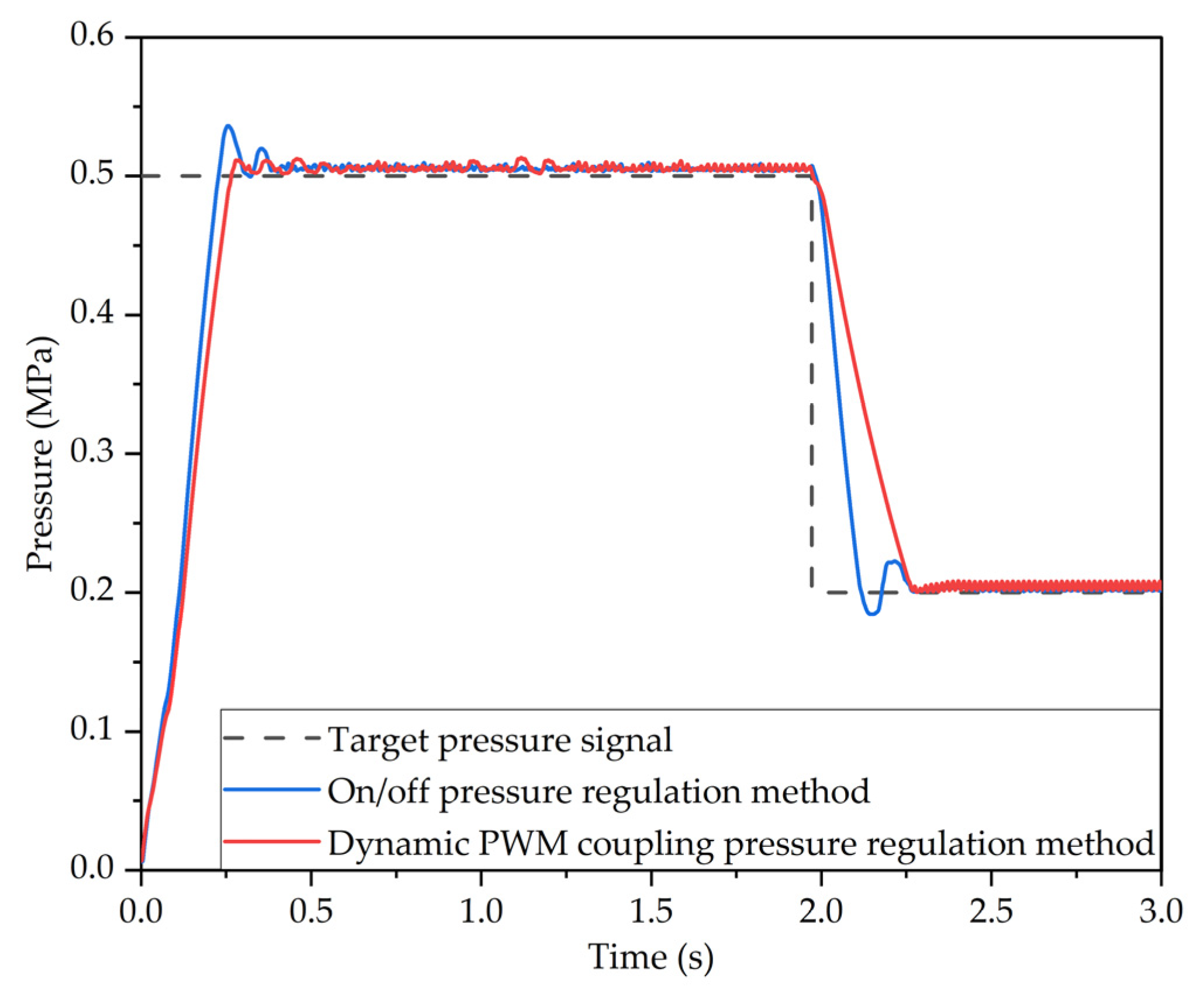
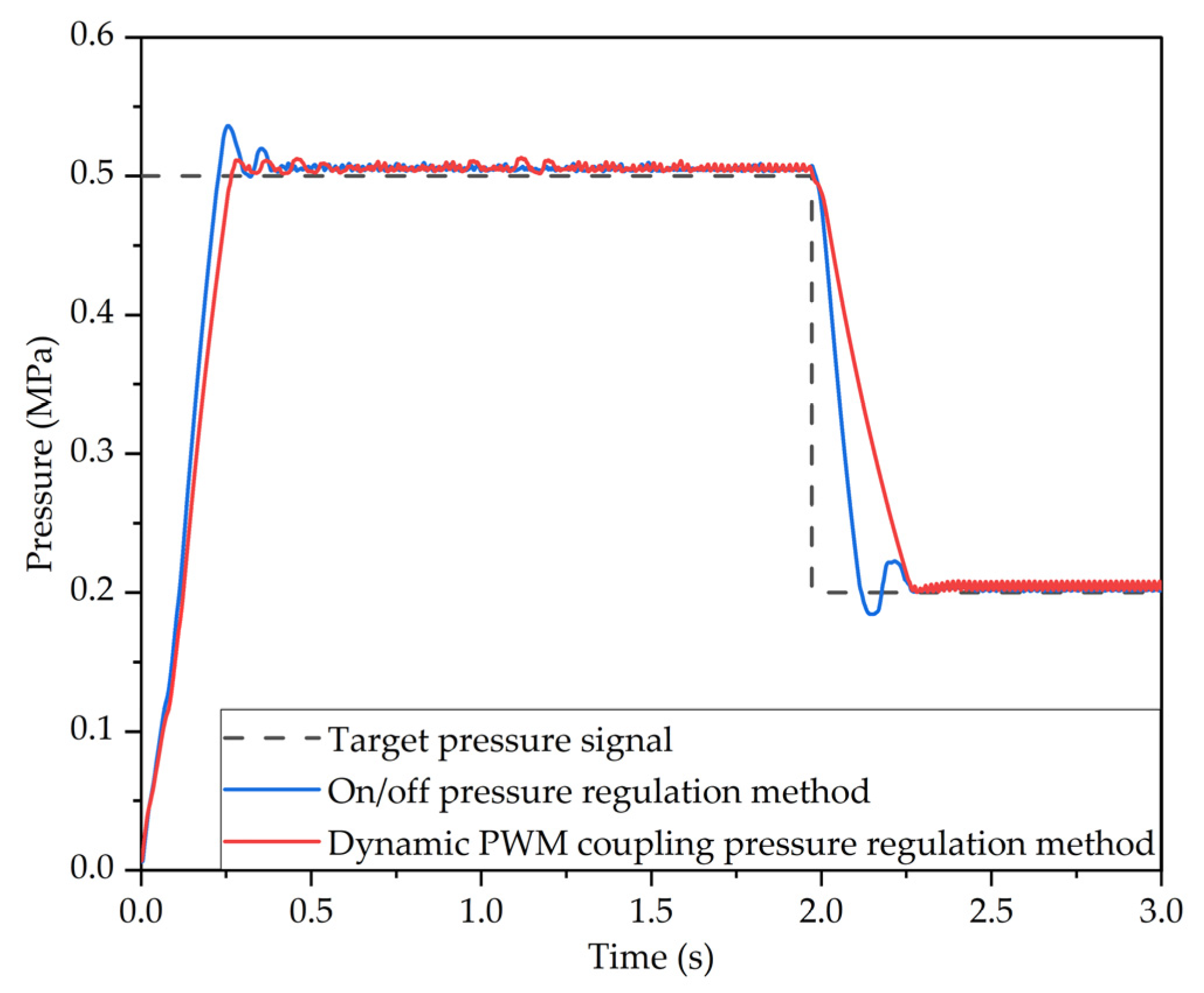
6.1. Comparative Analysis of Pressure Regulation Performance of Different Pressure Regulation Methods
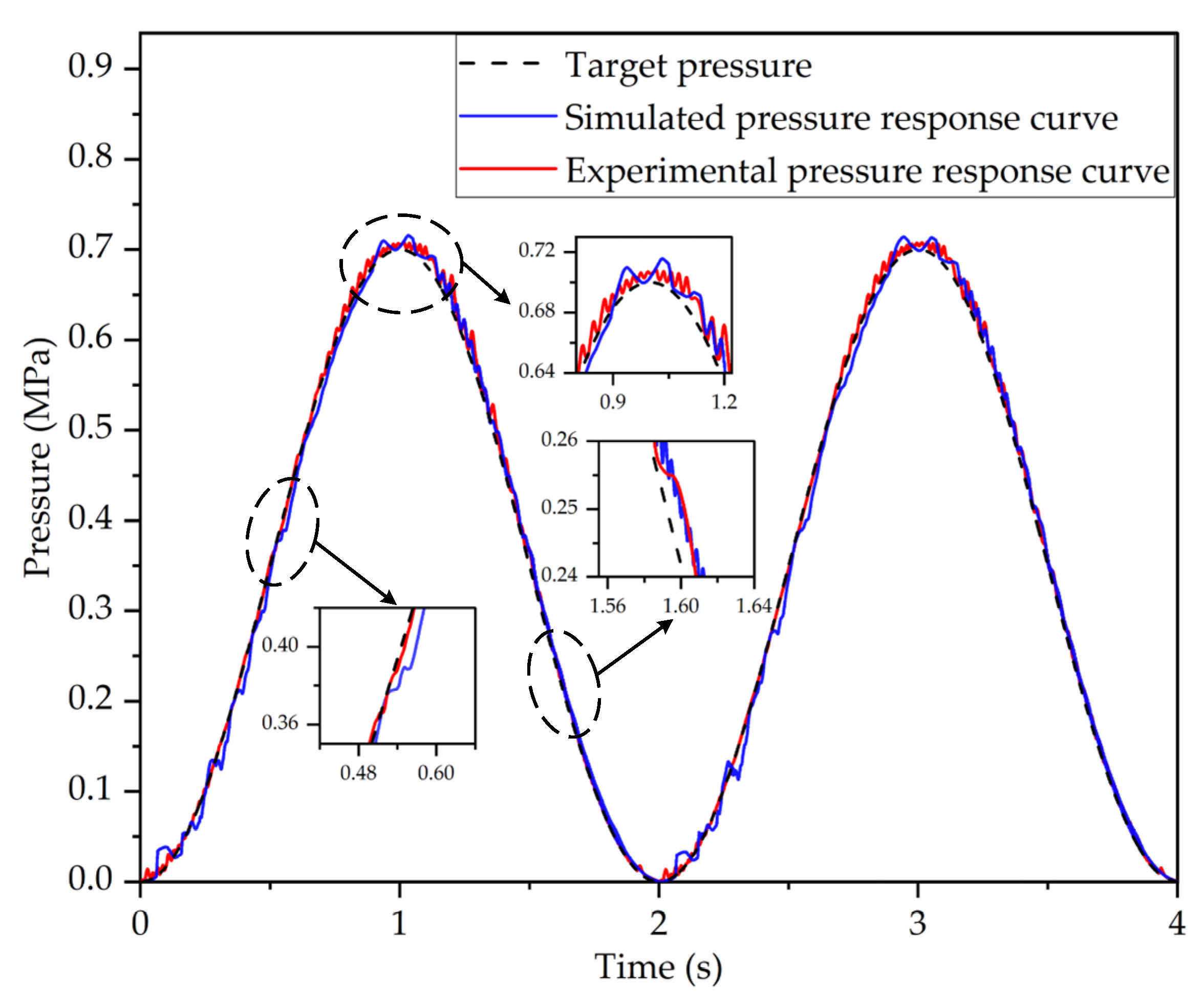
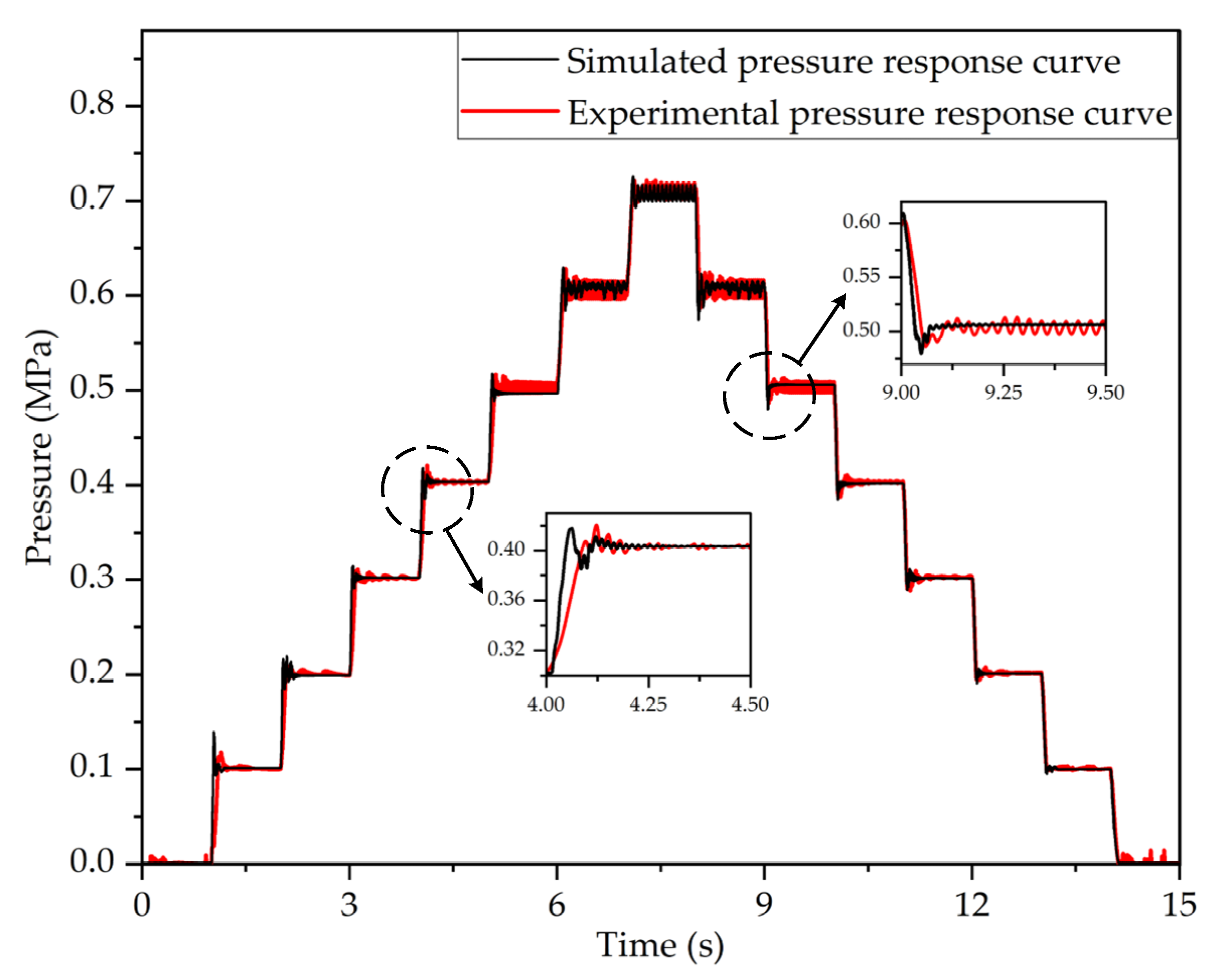
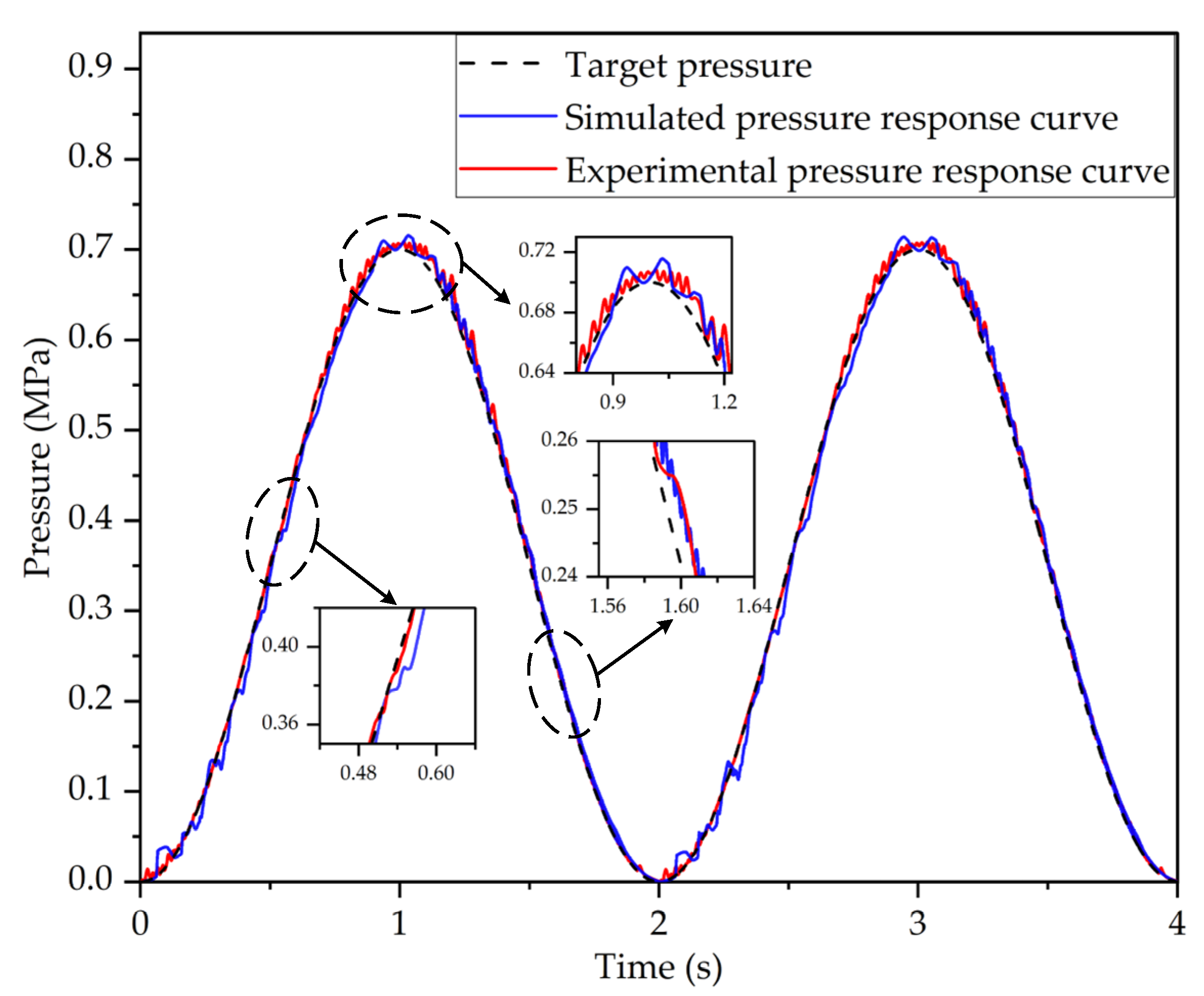
6.2. Pressure Regulation Performance Analysis of the Dynamic PWM Coupling Pressure Regulation Method under Complex Braking Conditions
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, W.B. Key Parameter Optimization and Control Strategy Research of Automatic Pressure Regulator for Commercial Vehicle Electronically Controlled Pneumatic Braking System. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2020. [Google Scholar]
- Hu, D.; Li, G.; Zhu, G.; Liu, Z.; Wang, Y. A Control-Oriented Linear Parameter-Varying Model of a Commercial Vehicle Air Brake System. Appl. Sci. 2020, 10, 4589. [Google Scholar] [CrossRef]
- Bao, H.; Wang, Z.; Wei, X.; Li, G. Study on the Structural Configurations and Pressure Regulation Characteristics of the Automatic Pressure Regulating Valve in the Electronically Controlled Pneumatic Brake System of Commercial Vehicles. Appl. Sci. 2021, 11, 10603. [Google Scholar] [CrossRef]
- Wu, S. Design of Function and Structure of Automatic Pressure Regulator for Vehicle Electronically Controlled Air Braking System. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2019. [Google Scholar]
- You, M.; Zhang, J.; Sun, D.; Gou, J. Characteristics Analysis and Control Study of A Pneumatic Proportional Valve. In Proceedings of the Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 19–20 December 2015. [Google Scholar]
- Li, X.; Zhao, L.; Zhou, C.; Li, X.; Li, H. Pneumatic ABS Modeling and Failure Mode Analysis of Electromagnetic and Control Valves for Commercial Vehicles. Electronics 2020, 9, 318. [Google Scholar] [CrossRef] [Green Version]
- Long, X. Research on the Proportional Relay Valve for Differential Braking Strategy of Commercial Vehicles. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2018. [Google Scholar]
- Hu, D.; Li, G.; Deng, F. Gain-Scheduled Model Predictive Control for a Commercial Vehicle Air Brake System. Processes 2021, 9, 899. [Google Scholar] [CrossRef]
- Aladjev, V.; Bogdevicius, M.; Rozyte, B. Mathematical Models of Element of Vehicle Pneumatic Brake System. In Proceedings of the 11th International Conference on Transport Means, Kaunas University of Technology, Kaunas, Lithuania, 18–19 October 2007. [Google Scholar]
- Yong, D. Research on Integrated Test System of Pneumatic Solenoid Valve Response Characteristic Parameters. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2018. [Google Scholar]
- Braun, T.; Reuter, J. A Distributed Parameter Approach for Dual Solenoid Valve Control with Experimental Validation. In Proceedings of the International Conference on Methods and Models in Automation and Robotics, Miedzyzdroje, Poland, 26–29 August 2013. [Google Scholar]
- Zhang, B.; Zhong, Q.; Ma, J.-E.; Hong, H.-C.; Bao, H.-M.; Shi, Y.; Yang, H.-Y. Self-correcting PWM control for dynamic performance preservation in high speed on/off valve. Mechatronics 2018, 55, 141–150. [Google Scholar] [CrossRef]
- Liu, P.; Fan, L.; Xu, D.; Ma, X.; Song, E. Multi-Objective Optimization of High-Speed Solenoid Valve Based on Response Surface and Genetic Algorithm. SAE Int. 2015. Available online: https://www.sae.org/publications/technical-papers/content/2015-01-1350/ (accessed on 18 May 2022).
- Zhang, L.; Bao, H.; Deng, F.; Li, G. Controller of new automatic pressure regulating valve for electro-pneumatic braking system of commercial vehicles and its experimental study. In Proceedings of the CAA International Conference on Vehicular Control and Intelligence, Tianjin, China, 29–31 October 2021. [Google Scholar]
- Zhang, R.; Peng, J.; Li, H.; Chen, B.; Liu, W.; Huang, Z.; Wang, J. A predictive control method to improve pressure tracking precision and reduce valve switching for pneumatic brake systems. IET Control. Theory Appl. 2021, 15, 1389–1403. [Google Scholar] [CrossRef]
- Li, G.Y.; Bao, H.W.; Hu, J.; Yang, F.; Wang, Z.Y. Automatic Pressure Regulating Valve Suitable for Multi-Level Driving Automation of Commercial Vehicle and Control Method: China. CN113479180 A. 2021-10-08 [2022-04-26]. Available online: https://patents.google.com/patent/CN113479180A/en?oq=CN113479180+A (accessed on 18 May 2022).
- Liu, X.H.; Yu, L.Y.; Zheng, S.; Chang, J.H.; Li, F. Hydraulic Pressure Control and Parameter Optimization of Brake-by-Wire System Based on Driver-Automation Cooperative Driving. In Proceedings of the ASME International Design Engineering Technical Conferences, Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar]
- Bao, H.; Wang, Z.; Wei, X.; Li, G. Analysis of Pressure Response Characteristics and Influencing Factors of The Automatic Pressure Regulating Valve in Electronic-Controlled Pneumatic Braking System of Commercial Vehicle. In Proceedings of the ASME/BATH 2021 Symposium on Fluid Power and Motion Control, Bath, UK, 19–21 October 2021. [Google Scholar]
- Yang, F. Study on Pneumatic Characteristics Calculation Method of the Fundamental Components of Air Brake Circuit for Intelligence Braking. Ph.D. Thesis, Wuhan University of Technology, Wuhan, China, 2018. [Google Scholar]
- Bao, H.; Wang, Z.; Liu, Z.; Li, G. Study on Pressure Change Rate of the Automatic Pressure Regulating Valve in the Electronic-Controlled Pneumatic Braking System of Commercial Vehicle. Processes 2021, 9, 938. [Google Scholar] [CrossRef]
- Shiee, M.; Sharifi, K.A.; Fathi, M.; Najafi, F. An experimental comparison of PWM schemes to improve positioning of servo pneumatic systems. Int. J. Adv. Manuf. Technol. 2016, 82, 1765–1779. [Google Scholar] [CrossRef]
- Pipan, M.; Herakovic, N. Closed-loop volume flow control algorithm for fast switching pneumatic valves with PWM signal. Control. Eng. Pract. 2018, 70, 114–120. [Google Scholar] [CrossRef]
- Tian, J.; Huang, J.M. Improvements of quickness in high speed on-off valve. In Proceedings of the 6th International Conference on Fluid Power Transmission and Control, Hangzhou, China, 5–8 April 2005. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Air Source Pressure | Driving Voltage | Frequency of Solenoid Valve | Orifice Area of Solenoid Valve | Volume of Control Cavity |
|---|---|---|---|---|---|
| Values | 0.75 MPa | 24 V | 80 Hz | 2.5 mm2 | 4 × 10−5 m3 |
| Parameter | Volume of brake chamber | Mass of the valve core | Maximum travel | Pre-load force | Spring rate |
| Values | 3 × 10−4 m3 | 5 g | 0.24 mm | 10 N | 2000 N/m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Wei, X.; Wang, Z.; Bao, H. Study on the Pressure Regulation Method of New Automatic Pressure Regulating Valve in the Electronically Controlled Pneumatic Brake Systems in Commercial Vehicles. Sensors 2022, 22, 4599. https://doi.org/10.3390/s22124599
Li G, Wei X, Wang Z, Bao H. Study on the Pressure Regulation Method of New Automatic Pressure Regulating Valve in the Electronically Controlled Pneumatic Brake Systems in Commercial Vehicles. Sensors. 2022; 22(12):4599. https://doi.org/10.3390/s22124599
Chicago/Turabian StyleLi, Gangyan, Xiaoxu Wei, Zaiyu Wang, and Hanwei Bao. 2022. "Study on the Pressure Regulation Method of New Automatic Pressure Regulating Valve in the Electronically Controlled Pneumatic Brake Systems in Commercial Vehicles" Sensors 22, no. 12: 4599. https://doi.org/10.3390/s22124599
APA StyleLi, G., Wei, X., Wang, Z., & Bao, H. (2022). Study on the Pressure Regulation Method of New Automatic Pressure Regulating Valve in the Electronically Controlled Pneumatic Brake Systems in Commercial Vehicles. Sensors, 22(12), 4599. https://doi.org/10.3390/s22124599